
Automated Generation of Instance Segmentation Labels for Traffic
Surveillance Models
D. Scholte
2 a
, T. T. G. Urselmann
1 b
, M. H. Zwemer
1,2 c
, E. Bondarev
1
and P. H. N. de With
1 d
1
Department of Electrical Engineering, Eindhoven University, Eindhoven, The Netherlands
2
ViNotion BV, Eindhoven, The Netherlands
Keywords:
Instance Segmentation, Object Detection, Real-Time Processing, Computer Vision, Traffic Surveillance.
Abstract:
This paper focuses on instance segmentation and object detection for real-time traffic surveillance applications.
Although instance segmentation is currently a hot topic in literature, no suitable dataset for traffic surveillance
applications is publicly available and limited work is available with real-time performance. A custom propri-
etary dataset is available for training, but it contains only bounding-box annotations and lacks segmentation
annotations. The paper explores methods for automated generation of instance segmentation labels for custom
datasets that can be utilized to finetune state-of-the-art segmentation models to specific application domains.
Real-time performance is obtained by adopting the recent YOLACT instance segmentation with the YOLOv7
backbone. Nevertheless, it requires modification of the loss function and an implementation of ground-truth
matching to overcome handling imperfect instance labels in custom datasets. Experiments show that it is
possible to achieve a high instance segmentation performance using a semi-automatically generated dataset,
especially when using the Segment Anything Model for generating the labels.
1 INTRODUCTION
Automated traffic surveillance systems support a
range of tasks involving congestion and accident ob-
servation or crowd management analysis. In these
systems, cameras are generally used to find the tra-
jectories of all relevant traffic participants in a scene.
In order to analyse the behaviour of traffic partici-
pants, it is vital to accurately localize and follow all
objects over time. Typical (real-time) techniques for
object localization use 2D bounding boxes to repre-
sent the object location. However, an instance seg-
mentation of an object provides more accurate local-
ization, especially for large elongated objects such
as a truck as depicted in Figure 1. Only bounding
boxes do not provide the insight on the real top-view
central point of an actor, instance segmentation is a
more refined technique that enables computation of
the central point especially if the camera parameters
are known (Zwemer. et al., 2022).
The focus of this work is on extending an ob-
ject detection model with instance segmentation that
a
https://orcid.org/0009-0004-9182-2911
b
https://orcid.org/0000-0002-2209-7216
c
https://orcid.org/0000-0003-0835-202X
d
https://orcid.org/0000-0002-7639-7716
Figure 1: A scene containing a large elongated object that
has a lot of background within the bounding box. Blurred
for privacy reasons.
can be utilized for real-time traffic analysis. It is
important to run instance segmentation in parallel to
bounding box estimation, since a bounding box cov-
ers the complete traffic participant (even if they are
partially occluded), while the instance segmentation
is only available for the visible parts of the object. In-
stance segmentation models are a hot topic in litera-
ture (Sharma et al., 2022) and although the amount of
models available is large and ever-growing, the ma-
jority of these models are computationally complex.
Another challenge is the lack of instance segmenta-
tion datasets for training and evaluation, since cur-
rent state-of-the-art datasets are not specifically aimed
at traffic surveillance. The creation of ground-truth
350
Scholte, D., Urselmann, T., Zwemer, M., Bondarev, E. and de With, P.
Automated Generation of Instance Segmentation Labels for Traffic Surveillance Models.
DOI: 10.5220/0012319500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
350-358
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

for instance segmentation is cumbersome and time-
consuming. A proprietary dataset containing traffic
surveillance images annotated with bounding boxes
only is available for our experimentation.
The problem statement addressed in this paper
is to explore a suitable instance segmentation model
that can be finetuned on the proprietary dataset, with-
out the need for manual annotation of the data. To
this end, we experiment with the YOLACT-YOLOv7
model that is able to perform object detection and
instance segmentation in real-time. However, this
model is not trainable without instance segmentation
ground truth. Therefore, this paper investigates the
following research questions:
• What segmentation model can be utilized best for
real-time object detection and instance segmenta-
tion in traffic surveillance applications?
• To what extent can this model be optimized such
that the best performance is achieved, while still
achieving a real-time performance?
• What solutions can be applied for the absence
of ground-truth data for instance segmentation in
the proprietary dataset annotated with bounding
boxes only?
The remainder of the paper is structured as fol-
lows. A literature review of state-of-the-art models
is given in Section 2. The methodology of proposed
strategies is presented in Section 3. Section 4 dis-
cusses the experimental setup and results. Lastly, Sec-
tion 5 summarizes and concludes this research.
2 RELATED WORK
This section presents a brief overview of the large
variety of instance segmentation models. Recent
models can be divided into several categories. In-
stance segmentation models are typically trained
fully-supervised with ground-truth segmentation an-
notations. These models can be categorized into two-
stage and single-stage.
Two-Stage Models. Similarly to object detection, two-
stage models, such as Mask R-CNN (He et al., 2017),
first create object proposals at the first stage and refine
these proposals at the second stage. Single-stage ap-
proaches create proposals and perform the refinement
in one shot and are typically more computationally
efficient than two-stage approaches.
Single-Stage Models. Single stage approaches are
SOLO(v2) (Wang et al., 2020a; Wang et al., 2020b),
YOLACT (Bolya et al., 2019), and more recent also
BlendMask (Chen et al., 2020), which is an extension
to YOLACT. Within YOLACT and BlendMask, dif-
ferent activation maps are combined to dictate the in-
stances. YOLACT uses coefficients to determine the
combination of these activation maps, on the other
hand, BlendMask employs attention maps based on
activation maps, both being computationally efficient
and resulting in final instances.
Recently, YOLOv7 (Wang et al., 2023) has shown
to be an effective and particularly fast model that is
suited for real–time object detection. It has been
adapted to serve as a backbone for YOLACT (Mu-
nawar and Hussain, 2023). This model achieves com-
petitive performance compared to other single-stage
instance segmentation models but is compact and has
a low-latency inference.
Transformer-Based Models. Besides these two cate-
gories of convolutional neural networks, transformer
models have recently shown their capabilities to
achieve a high detection and segmentation perfor-
mance. The recent Mask2Former (Cheng et al., 2021)
consists of a backbone, a pixel encoder and a trans-
former decoder. Its main feature is masked atten-
tion, which is a variant of cross attention but con-
strained on mask query prediction. Another trans-
former model with high performance is the Segment
Anything Model (SAM) (Kirillov et al., 2023). It uti-
lizes an image encoder based on the Vision Trans-
former algorithm (Dosovitskiy et al., 2020) to pro-
duce image embeddings. Prompts are then used to
determine the embeddings of interest. These prompts
can be divided into two categories: sparse prompts
(being points, bounding boxes, or text) or dense
prompts (being masks). The mask decoder processes
the prompts together with the image embeddings to
create a high-quality mask. This model is computa-
tionally heavy to be used for edge devices, but can
be utilized to generate segmentation labels to build a
training dataset.
Box-Supervised Models. In instance segmentation lit-
erature, there is a paradigm shift to box-supervised
instance segmentation models because of the lim-
ited amount of ground-truth instance segmentation.
In these techniques, only bounding-box annotations
are used for supervision during training. The re-
cent BoxLevelset (Li et al., 2022a) builds upon the
SOLOv2 model and utilizes an instance-aware de-
coder that is improved by a level-set evolution step
within training. This step includes the Chan-Vese en-
ergy function (Getreuer, 2012) to evaluate the seg-
mentation performance based on the bounding box
ground truth. The Box2Mask (Li et al., 2022b) acts
as an improvement of BoxLevelset by introducing a
Local Consistency Module (LCM) that exploits lo-
cal pixel consistencies and this model has been im-
plemented for both the SOLOv2 and the MaskFormer
Automated Generation of Instance Segmentation Labels for Traffic Surveillance Models
351
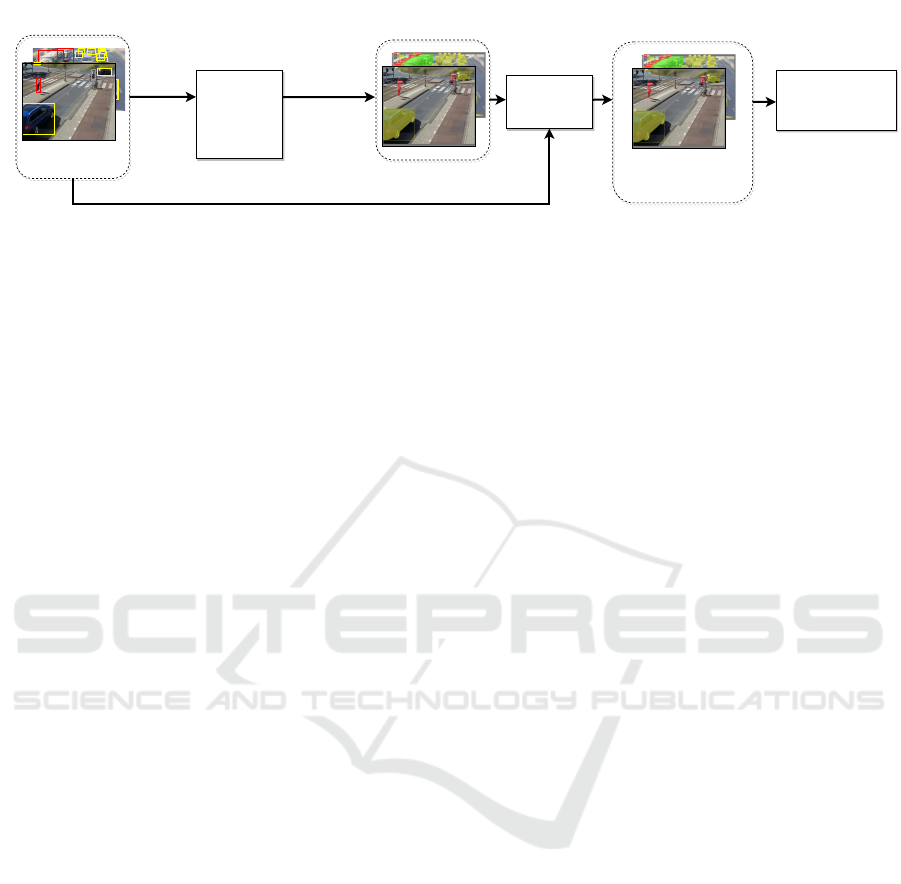
Image +
Bounding box
Supervised
YOLACT-YOLOv7
training
Ground-truth
matching
Image +
Bounding box +
Instance segmentation
Pseudo
ground-truth dataset
Proprietary dataset
Bounding
boxes
Instance
Segmentations
Instance
Segmentation
Method
Figure 2: Training pipeline with pseudo ground-truth data. The instance segmentation method utilized for generating the
pseudo ground-truth data is either a box-supervised model that is finetuned using the proprietary data or a pre-trained model.
The pseudo ground-truth data is used to train the final YOLACT-YOLOv7 model.
models (Li et al., 2022b). These box-supervised mod-
els, especially Box2Mask, show promising results
and the performance gap between fully-supervised
and box-supervised instance segmentation is decreas-
ing significantly. These models could be finetuned on
our proprietary dataset, such that the performance is
optimized, and be used to generate segmentation la-
bels for the whole dataset afterwards.
3 METHOD
This section presents the proposed methodology for
training the YOLACT-YOLOv7 model on the pro-
prietary dataset, without the requirement to manu-
ally create instance segmentation ground-truth for the
dataset. To that end, Section 3.1 proposes two novel
semi-automated approaches to generate instance seg-
mentation ground-truth for the proprietary dataset,
these methods are based on existing instance segmen-
tation models and on box-supervised models that are
first finetuned on the proprietary dataset, respectively.
Section 3.2 continues by proposing an adjustment of
the loss function of the YOLACT-YOLOv7 model,
such that it is able to handle datasets that are anno-
tated with segmentation labels only partially.
3.1 Generating Pseudo Ground-Truth
This section investigates the use of models that can
generate pseudo ground-truth data for instance seg-
mentation semi-automatically. The generation of
pseudo ground-truth is proposed in two different ap-
proaches. First, the existing pre-trained models are
utilized (see Section 3.1.1). Second, box-supervised
models are finetuned on the proprietary dataset (see
Section 3.1.2) and then utilized to create pseudo
ground-truth labels. Let us discuss both methods in
detail.
3.1.1 Pre-Trained Generation of Instances
Figure 2 depicts the automated processing pipeline
that includes multiple steps to create the ground
truth for the proprietary dataset and finally train the
YOLACT-YOLOv7 model on this data. First, the en-
tire proprietary dataset containing bounding boxes is
processed by a pre-trained model to generate instance
segmentations for all objects in the dataset. Next,
these instance segmentations need to be matched with
the bounding boxes from the proprietary dataset to
create the pseudo ground-truth dataset. This match-
ing procedure is now discussed in more detail.
Ground-Truth Matching. The instance segmentations
from the model are predicted independently (not re-
lated to the bounding-boxes in the pseudo ground-
truth). The number of generated instances and the or-
der of the instances can differ from the bounding-box
annotations, therefore the segmentations cannot be
linked directly to the bounding boxes. For each gen-
erated segmentation the Complete Intersection over
Union (CIoU) is computed by using the bounding box
around the edges of the segmentation mask and each
bounding box from the ground-truth. Then, matches
are generated based upon the Hungarian matching al-
gorithm (Kuhn, 2012), e.g. the highest matching pair
based on the CIoU is selected for the pseudo ground-
truth dataset and removed from the set of possible
matches. This is repeated until the set of possible
matches is empty or the CIoU values do not exceed a
threshold of 0.30. It is possible that not all bounding
boxes are matched with an instance segmentation be-
cause of possible missed or false segmentations gen-
erated by the instance segmentation model. There-
fore, the ground-truth bounding boxes that are not
matched to any instance segmentation are also added
to the pseudo ground-truth dataset (without segmen-
tation). To enable training the YOLACT-YOLOv7
model with data that does not contain segmentation
ground-truth for all bounding box annotations (par-
tially annotated data), a novel loss function is pro-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
352

person
person person
pers
person
car
car
car
ar
carcar
person
personpers
Figure 3: Example images of the proprietary dataset used for this research. The image on the right-hand side is manually
annotated with instance segmentations. Blurred for privacy reasons.
posed in Section 3.2.
Training of the YOLACT-YOLOv7 Model. The last
step of Figure 2 is the supervised training of the
YOLACT-YOLOv7 model. The created pseudo
ground-truth dataset that is generated by the ground-
truth matching is used to train the YOLACT-YOLOv7
model, including the proposed loss function to han-
dle the imperfections remaining in the pseudo ground-
truth dataset.
3.1.2 Box-Supervised Generation 0f Instances
Pre-trained models for instance segmentation are not
adapted to the traffic surveillance domain. Ideally,
these models are adapted for traffic surveillance in or-
der to improve the segmentation accuracy, this can
be achieved by finetuning box-supervised instance-
segmentation models on the proprietary dataset. Fine-
tuning a model without segmentations is impossi-
ble for fully-supervised models. Nevertheless, box-
supervised instance segmentation models can be fine-
tuned using solely bounding box annotations. Thus,
it is possible to fine-tune these models using the pro-
prietary dataset such that a higher segmentation per-
formance is achieved. This approach is shown as
the second method of Figure 2. After finetuning,
these models can generate annotations automatically
for the proprietary dataset. The ground-truth matcht-
ing, the adapation of the loss function and the train-
ing of YOLACT-YOLOv7 model in this approach are
similar to the first method.
3.2 Adaptation Loss-Function
The original YOLACT-YOLOv7 model can only be
trained with datasets that contain both the bounding
box and segmentation ground-truth for each object.
The instance-segmentation annotations are currently
not available in our proprietary traffic surveillance
dataset. Therefore, we propose to adjust the loss func-
tion such that the model can be trained with a dataset
that is only partly annotated with instance segmenta-
tions. This is an interesting approach since the pro-
prietary dataset can be combined with generic public
datasets that have instance segmentation annotations
available. Hence, this may relieve the annotation ef-
fort on the proprietary dataset.
In more detail, the YOLACT-YOLOv7 loss con-
sists of four different loss components, e.g. the ob-
jectness L
obj
, classification L
cls
, bounding-box L
box
and mask L
mask
losses. In the proposed loss func-
tion, the contribution of the mask loss is dependent on
the amount of objects that include instance segmenta-
tion data within a batch, such that the limited amount
of annotations are automatically weighted proportion-
ally to the other loss terms. Therefore, the proposed
loss function is as follows:
L = λ
ob j
L
obj
+ λ
cls
L
cls
+ λ
box
L
box
+
λ
msk
α
msk
∑
N
i=0
gt
msk,i
gt
all,i
L
msk
,
(1)
where λ
obj
, λ
cls
, λ
box
and λ
msk
are scalar weights
for the respective loss functions, N is the batch size,
gt
mask,i
is the number of ground-truth masks within
image i, gt
all,i
is the total number of ground-truth an-
notations within an image i, and α
mask
is a hyper-
parameter that denotes the fraction of objects in the
dataset that have instance segmentation ground-truth
available (i.e. if 70% of the annotation data contain
both a bounding box and a segmentation, then α
mask
becomes 0.7).
4 EXPERIMENTS
In Section 4.1, cross-validation is conducted among
various instance segmentation models applied to the
proprietary validation set. The second experiment in
Section 4.2 uses partially annotated data to measure
the impact of training the YOLACT-YOLOv7 model
with only a fraction of segmentation instance labels
and a full set of bounding boxes. Thereafter, the cre-
ation of instance segmentation ground-truth for the
proprietary dataset is investigated in Section 4.3. In
the final experiment in Section 4.4, the generated in-
stance segmentation labels on the proprietary dataset
Automated Generation of Instance Segmentation Labels for Traffic Surveillance Models
353
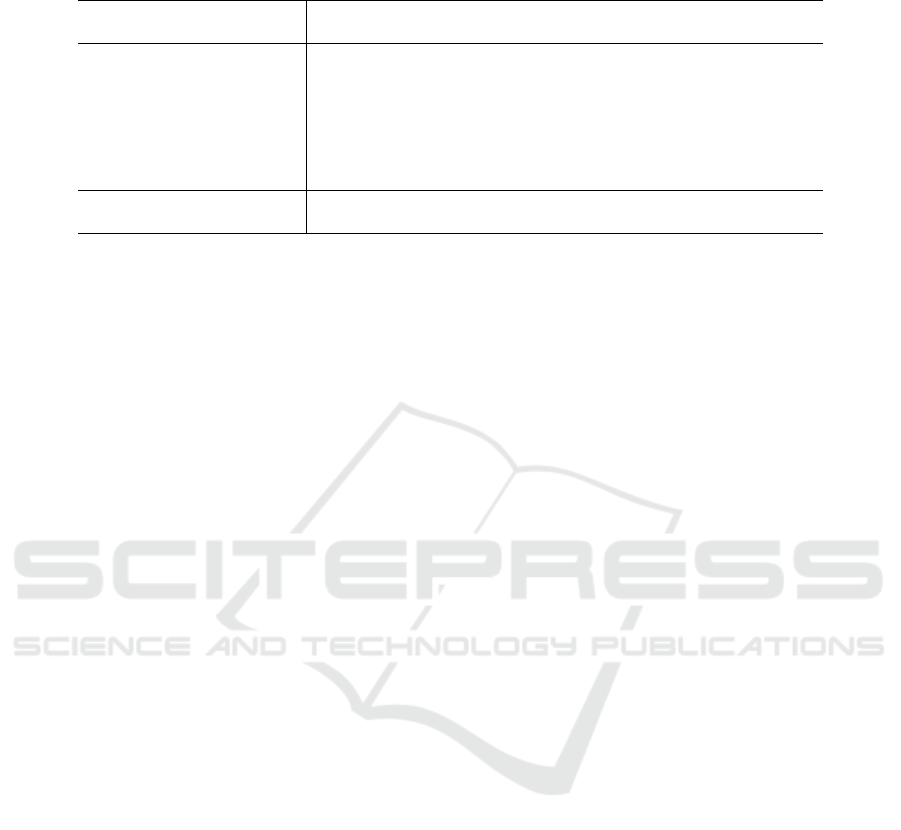
Table 1: Cross-validation on state-of-the-art instance segmentation models using the manually annotated proprietary valida-
tion set. All mAP results are shown in percentage.
Model Backbone Box Box Mask Mask Inf. time
mAP
0.50
mAP
0.50−0.95
mAP
0.50
mAP
0.50−0.95
[ms]
Mask R-CNN ResNet50 75.4 58.9 74.6 56.5 198.75
YOLACT ResNet101 67.3 45.3 64.0 45.7 121.99
BlendMask ResNet101 79.2 65.3 78.5 62.7 182.53
SOLOv2 ResNet101 77.5 65.0 75.4 58.0 292.43
QueryInst ResNet101 76.6 63.2 77.6 59.6 334.27
YOLACT YOLOv7 78.4 64.6 76.6 57.6 21.2
Mask2Former Swin-S 76.6 62.1 80.1 62.9 530.93
BoxLevelset ResNet50 65.5 44.9 64.7 43.7 258.75
Box2Mask ResNet101 78.2 61.1 79.1 57.8 799.36
are deployed to train the YOLACT-YOLOv7 model,
and its performance is measured.
Experimental Setup. All experiments on the
YOLACT-YOLOv7 model keep the original param-
eters. The values of λ
obj
, λ
cls
and λ
box
in Equation (1)
are set to 0.7, 0.3, and 0.05, respectively. The number
of prototypes is set to 32.
Traffic Surveillance Dataset. The proprietary dataset
includes 130k images of traffic surveillance scenes.
This dataset includes a variety of scenes such as com-
plex intersections, crowded pedestrian places, and
busy highways. Example images are shown in Fig-
ure 3. The dataset contains bounding-box annotations
only, which is a major limitation for training an in-
stance segmentation model. The annotated bounding
boxes contain the entire body (e.g. the boxes cover
occluded body parts). The four relevant classes are
Person, Car, Bus, and Truck.
Proprietary Validation Dataset. Since the dataset
contains bounding boxes only, the validation of seg-
mentation models is impossible. Therefore, 100 im-
ages have been manually annotated with instance
segmentations (proprietary validation set), containing
1.230 persons, 396 cars, 23 trucks and 21 busses. The
proprietary validation set is representative for the pro-
prietary dataset and is utilized for validation in all ex-
periments. An example of an annotated image can be
seen on the right-hand side in Figure 3.
Evaluation metrics. The metrics used for evaluation
of the instance segmentation and detection perfor-
mance are based on the COCO protocols. The Aver-
age Precision (AP) is calculated by using an Intersec-
tion over Union (IoU), either an IoU of 0.5 (AP
0.5
) or
averaged over the range [0.5:0.05:0.95] (AP
0.50−0.95
).
The AP is calculated for the bounding boxes and the
segmentation masks separately. The precision and re-
call for segmentation masks are calculated per pixel
between the ground truth and the predicted mask. The
mean Average Precision (mAP) is the average value
of the AP over all classes. The inference-time mea-
surements are defined by the average time that the
model requires to process the proprietary validation
set.
4.1 Model Cross-Validation
The performance of existing (pre-trained) models on
our proprietary surveillance dataset is investigated in
the first experiment. The objective is to find a model
that has a low latency while having a high segmenta-
tion performance. The models are evaluated by cross-
validation on the proprietary validation set.
The results are depicted in Table 1. The
BoxLevelset model has lower performance compared
to the other models. However, this model is box-
supervised during training and does not require in-
stance segmentation ground-truth during training.
The Box2Mask model, that is also box-supervised,
achieves higher performance and even competes
with fully-supervised instance segmentation mod-
els in terms of detection and segmentation perfor-
mance. Another interesting result is that there are
major differences between the ResNet101-based and
YOLOv7-based YOLACT models. With respect to
performance, the YOLOv7 backbone is more effi-
cient and results in significantly higher performance.
Moreover, the YOLACT-YOLOv7 implementation
has a significantly lower inference time with respect
to all other models, while having sufficiently accu-
rate detection and segmentation performance. There-
fore, the YOLACT-YOLOv7 implementation is se-
lected for further experiments.
4.2 Training with Fraction of Instances
This experiment helps to determine whether it is nec-
essary to provide both bounding boxes and instance
segmentation annotations for all data in an instance
segmentation dataset, or whether it is sufficient to pro-
vide only a subset of the data with instance segmenta-
tion annotations. The latter would imply a reduction
in the required (manual) annotation effort or training
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
354
Applied training split [%]
mAp [-]
Bounding Box
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
0.5
0.5-0.95
0.5
0.5-0.95
Segmentation mask
100 90
80
70 60 50 40 30 20 10 0
Figure 4: Instance segmentation performance scores for
training with a limited amount of instance segmentations.
The mAP
0.5
is depicted as dashed lines and the mAP
0.5−0.95
is depicted as solid lines. The segmentation performance
starts to drop heavily below a split of 70%, while the box
performance remain high.
with a imperfect pseudo ground-truth dataset.
This experiment evaluates the effect of YOLACT-
YOLOv7 training with only a fraction of the in-
stance labels and is performed with the COCO2017
dataset (Lin et al., 2014). To evaluate the amount
of required segmentation ground-truth, splits between
data with and without instance labels are used.
The results of the experiment are shown in Fig-
ure 4. It can be observed that for each applied split,
the bounding-box performance remains high within
a small deviation. However, a clear drop in seg-
mentation performance occurs when less than 70%
of instance segmentation annotations are available for
training. Below a 50% split, the segmentation perfor-
mance deteriorates significantly.
From these results, it can be concluded that it is
possible to achieve decent segmentation performance
when not all images in the dataset are annotated with
instance segmentations. Up to 90% of the segmen-
tation performance can be achieved for the COCO
dataset with only 70% of instance segmentation an-
notations. Therefore, acceptable results are expected
on the proprietary dataset if at least 70% of the dataset
is annotated with instance segmentation labels. How-
ever, 70% is still deemed too cumbersome to generate
for the proprietary dataset manually.
4.3 Creation of Pseudo Ground-Truth
This experiment evaluates generation of instance seg-
mentation for the proprietary dataset. This pseudo
ground-truth is generated semi-automatically. The
procedure is described in Section 3.1. The validation
of the models is performed on the proprietary dataset.
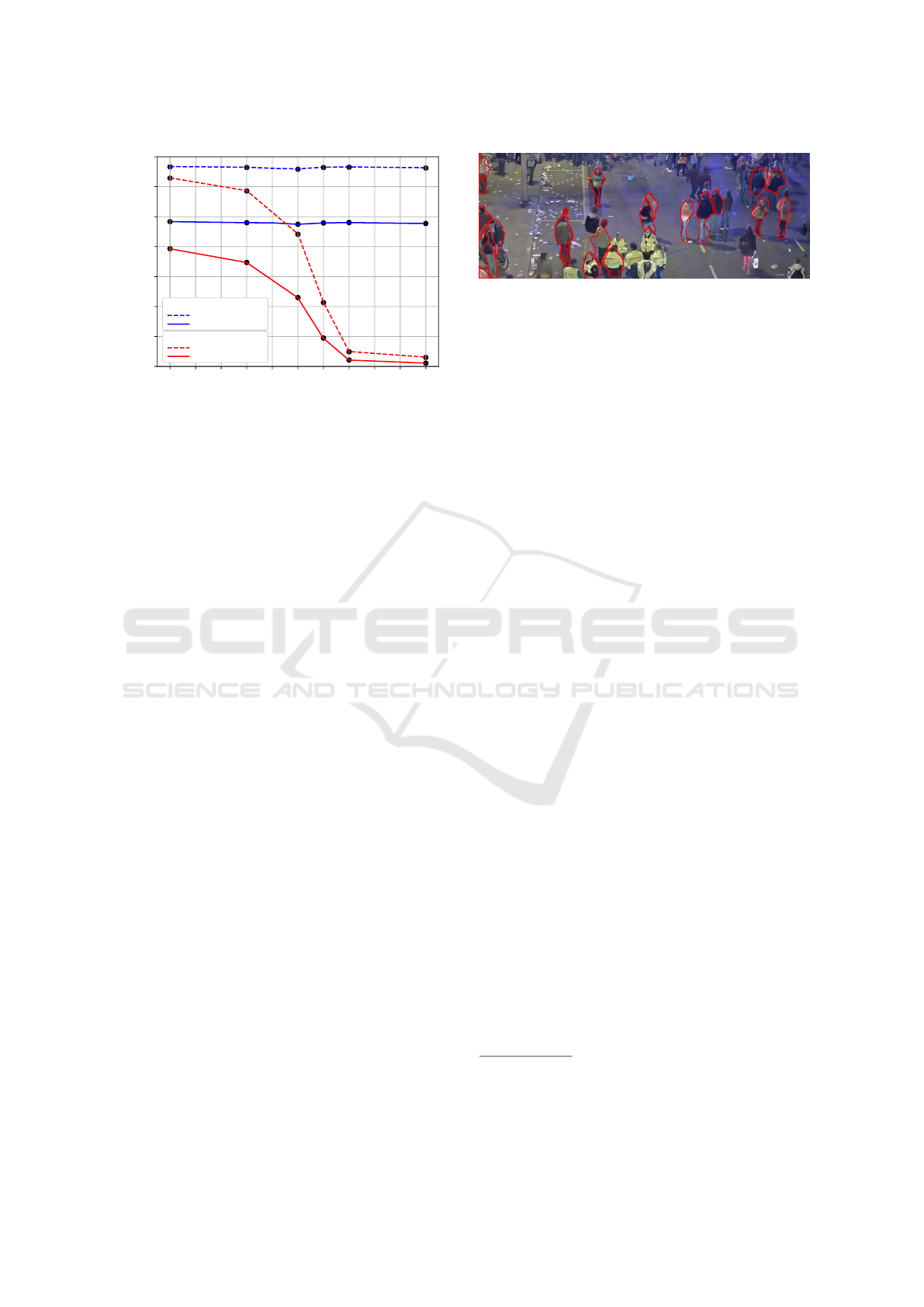
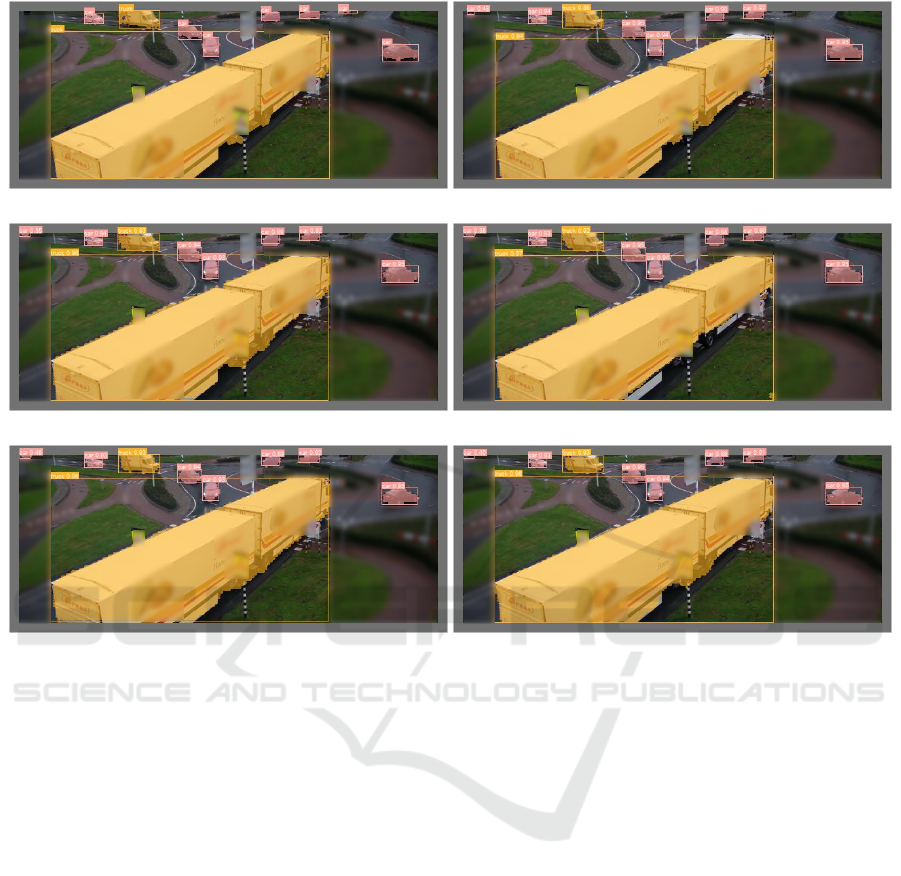
Figure 5: Generated instance labels from the pretrained
Box2Mask model. There are major difference between the
COCO-dataset and the proprietary dataset, resulting in a lot
of missing instance labels. Blurred for privacy reasons.
Besides the bounding box and segmentation metrics,
the number of generated segmentation instances that
are matched to the ground-truth bounding boxes are
measured. The results for the pre-trained models and
the fine-tuned box-supervised models are now sepa-
rately discussed in more detail.
4.3.1 Label Generation Using Pre-Trained
Models
In the first approach, we investigate the creation of
the instance segmentation labels for the proprietary
dataset by utilizing pre-trained models such as the
BoxLevelSet, Box2Mask and SAM.
The results are presented in the top three rows in
Table 2. It can be observed that the Box2Mask model
achieves better performance than the BoxLevelset
model. Nevertheless, visual inspection shows that
there are missing predictions for objects in the back
of the scene and occluded objects depicted in Fig-
ure 5. Besides that, SAM has the best segmenta-
tion results for creating the pseudo ground-truth labels
with a mask mAP score of 84.3% and always gener-
ates a segmentation for each bounding-box annotation
in the ground truth.
4.3.2 Label Generation Using Fine-Tuned
Models
In the second approach, the box-supervised models
are fine-tuned on the proprietary dataset. Hence, bet-
ter performance is expected compared to the models
evaluated in the previous experiment.
A limitation at box-supervised models such as
Box2Mask and BoxLevelset, is that they are too large
in terms of memory consumption to train with the de-
fault settings. Therefore, it is chosen to use half of
the image resolution, thereby reducing the memory
consumption by a factor of four
1
. The loss weight-
1
For indication, the regular training of BoxLevelset re-
quired 8x V100 GPU with 32 GB memory each, whereas
for this research a GPU setup of 3x 3090 GPU with 24 GB
memory was available.
Automated Generation of Instance Segmentation Labels for Traffic Surveillance Models
355
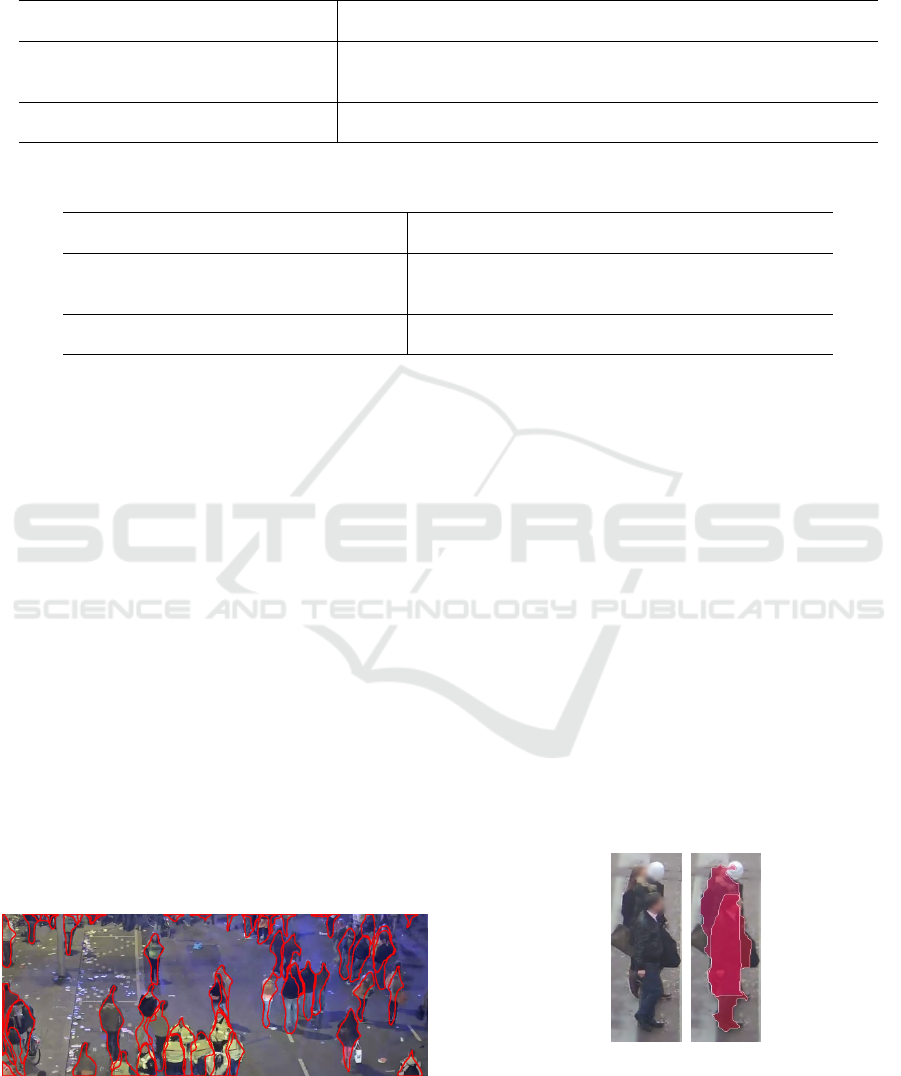
Table 2: Results of the BoxLevelset and Box2Mask model using a pre-trained model on the COCO dataset, and after finetuning
on the proprietary dataset. The second half of the table shows models that include finetuning on the proprietary dataset. It
should be noted that for SAM, the original resolution of the input image is used and no matching is required since it uses the
bounding boxes from the ground truth as input prompts (100% matching score and Box mAP).
Model Input Training Ground truth Box Box Mask Mask
resolution dataset matching mAP
0.5
mAP
0.50−0.95
mAP
0.5
mAP
0.50−0.95
BoxLevelset 1333x800 COCO 73.0 65.5 44.9 64.7 43.7
Box2Mask 1333x800 COCO 79.1 78.2 61.1 79.1 57.8
SAM N/A SA-1B 100.0 100.0 100.0 84.3 61.4
BoxLevelset 667x400 Proprietary 86.6 77.7 57.6 79.6 48.9
Box2Mask 667x400 Proprietary 92.7 85.5 64.0 80.3 52.4
Table 3: Results after training the YOLACT-YOLOv7 model using an instance segmentation dataset. The pseudo dataset is
created in a different way for each result, either pre-trained on COCO or fine-tuned on the proprietary dataset.
Pseudo labeling model Training dataset Box Box Mask Mask
mAP
0.50
mAP
0.50−0.95
mAP
0.50
mAP
0.50−0.95
BoxLevelset-ResNet50 COCO 92.6 77.4 85.5 58.0
Box2Mask-ResNet101 COCO 92.5 77.4 85.6 60.3
SAM SA-1B 94.6 78.3 87.6 65.4
BoxLevelset-ResNet50 Proprietary 92.6 76.4 85.5 52.9
Box2Mask-ResNet101 Proprietary 92.8 76.5 84.7 54.2
ing parameters of Boxlevelset are empirically fine-
tuned and changed to 3.0, 3.0 and 4.0 for the focal
loss, box-projection loss, and the level-set loss, re-
spectively. For Box2Mask, these weighting param-
eters are changed to 4.0, 2.5, and 6.0 for the cross-
entropy loss, the box-projection loss, and the level-set
loss, respectively. All other training parameters re-
main the same for fine-tuning the models.
The results are depicted in the last two rows in
Table 2. It can be seen that the detection and seg-
mentation performances have increased with respect
to the pre-trained models. Moreover, the ground-truth
matching results have improved by a large margin of
at least 12%, indicating that more segmentation in-
stances are found and matched. It can be concluded
that fine-tuning helps to improve the quality of the
pseudo ground-truth dataset.
Figure 6 shows that more segmentation instances
are found, especially for objects that are at the back
of a scene. However, it also shows that the segmen-
tation instances are often incorrect when objects are
partially occluded, as shown in Figure 7. In this fig-
ure, the mask of the occluded object also includes the
Figure 6: Generated instance labels from the fine-tuned
Box2Mask model. Fine-tuning the model on the propri-
etary dataset resulted in greatly increased amount of labels.
Blurred for privacy reasons.
occluding object area.
4.4 Training with Pseudo Ground-Truth
In this experiment, the pseudo ground-truth datasets
created in the previous experiments are used to fine-
tune the YOLACT-YOLOv7 model. The fine-tuned
model is then applied on the proprietary validation
set. This is the last step in the method depicted in
Figure 2.
The results are shown in Table 3. The highest
performance is obtained when training on the dataset
created using SAM. Furthermore, there is a major
difference (12.5%) in the segmentation performance
as seen in the last column of Table 3. This in-
dicates that SAM has higher quality segmented in-
stances than the box-supervised models, resulting in
a better performing YOLACT-YOLOv7 model. Be-
sides that, the YOLACT-YOLOv7 model trained on
the segmentation labels generated by Box2Mask re-
Figure 7: The left image is a snippit from the proprietary
dataset, while the right shows the predicted segmentations
by BoxLevelset after fine-tuning. One occluded person is
not detected, and overlapping segmentations are present that
are caused by the bounding box annotations.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
356
(a) Ground truth (b) Segment Anything Model
(c) BoxLevelset trained on COCO (d) BoxLevelset trained on proprietary
(e) Box2Mask trained on COCO (f) Box2Mask trained on proprietary
Figure 8: Results after training the YOLACT-YOLOv7 model with different generated datasets. Visually, a similar perfor-
mance can be seen between all models. The main differences can be seen in boundary details. Blurred for privacy reasons.
sults in a higher performance than the model trained
on the BoxLevelset-based dataset. Surprisingly, us-
ing the datasets generated by the box-supervised mod-
els do not result in a better performing YOLACT-
YOLOv7 model (bottom two rows in Table 3). This is
unexpected, since the previous experiment has shown
that the fine-tuned models obtained better detection
and segmentation results than the models that were
pre-trained on COCO. This is probably caused by er-
rors in the segmentation masks of occluding objects,
as already visually observed in the previous experi-
ment and shown in Figure 7. Furthermore, the de-
crease in segmentation quality due to the reduction
in input image resolution may cause inaccurate seg-
mentation masks near object edges in the generated
dataset.
For all models, the bounding-box performance
is high due to model fine-tuning on the proprietary
dataset. This inevitably results in the prediction of in-
stance segmentations, since the YOLACT-YOLOv7
model simultaneously creates box and segmenation
predictions, together with a joint confidence score.
Hence, even though the instance segmentation masks
may not be learned accurately due to false or miss-
ing ground-truth, there will always be a segmentation
prediction (and a bounding-box prediction) if the con-
fidence score is above a certain threshold.
Visual inspection shows that all YOLACT-
YOLOv7 models are able to detect and segment the
objects very well, even most of the participants within
crowded scenes. An example image with results is
shown in Figure 8, only small differences occur in
these images. The object confidence is very similar
for all objects. The pre-trained box-supervised results
overestimate a few objects, where the fine-tuned box-
supervised models underestimate the objects edges.
SAM and BoxLevelset also have problems to segment
the whole large object in front.
In conclusion, the box mAP scores are sufficiently
high for all trained YOLACT-YOLOv7 models (over
92%). The highest mask mAP score is obtained by
the YOLACT-YOLOv7 model trained on the segmen-
tation dataset that is generated by SAM (over 87%).
Automated Generation of Instance Segmentation Labels for Traffic Surveillance Models
357

5 CONCLUSIONS
This paper investigates object detection and instance
segmentation for real-time traffic surveillance appli-
cations. To this end, we have adopted existing in-
stance segmentation models by training them on a
proprietary dataset. Since instance-segmentation an-
notations are not available for this dataset, two novel
methods are proposed for generating these annota-
tions in a semi-automated procedure. The first pro-
cedure utilizes existing pre-trained models, while the
second procedure employs box-supervised models
that are first finetuned on the proprietary dataset.
The YOLACT-YOLOv7 model is evaluated as
optimal for traffic surveillance applications because
of its high performance and low latency. Frac-
tion training experiments on the COCO dataset show
that 90% of the instance segmentation performance
can be achieved when only 70% of the dataset con-
tains instance segmentation annotations. Besides
this, the YOLACT-YOLOv7 detection and segmen-
tation performance significantly increases when it
is trained on the proprietary dataset containing au-
tomatically generated instance segmentations. The
instance-segmentation performance is highest when
YOLACT-YOLOv7 is trained on the segmentation
dataset that is generated by the Segment Anything
Model (87.6% mAP). Finetuning of a box-supervised
model to generate the instance segmentation ground-
truth for the proprietary dataset does not result in a
higher performance (85.5% mAP for BoxLevelSet).
Visual inspection of the results show that future re-
search should focus on improving instance segmen-
tation for partially occluded objects, for example by
improving the quality of the automatically generated
dataset even more.
Training YOLACT-YOLOv7 on a segmentation
dataset that is annotated semi-automatically forms an
attractive solution, since it requires low manual anno-
tation effort while the quality of the generated data is
suitable for training. The trained YOLACT-YOLOv7
model achieves high detection and instance segmen-
tation performance of 94.6% and 87.6% respectively,
while maintaining real-time inference speed.
REFERENCES
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019). Yolact:
Real-time instance segmentation. 2019 IEEE/CVF
ICCV, pages 9156–9165.
Chen, H., Sun, K., Tian, Z., Shen, C., Huang, Y., and Yan,
Y. (2020). Blendmask: Top-down meets bottom-up
for instance segmentation. In 2020 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 8570–8578.
Cheng, B., Choudhuri, A., Misra, I., Kirillov, A., Gird-
har, R., and Schwing, A. G. (2021). Mask2former for
video instance segmentation. CoRR, abs/2112.10764.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Min-
derer, M., Heigold, G., Gelly, S., Uszkoreit, J., and
Houlsby, N. (2020). An image is worth 16x16 words:
Transformers for image recognition at scale. CoRR,
abs/2010.11929.
Getreuer, P. (2012). Chan-vese segmentation. Image Pro-
cessing On Line, 2:214–224.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In 2017 IEEE Int. Conf. on Comp. Vision
(ICCV), pages 2980–2988.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., Doll
´
ar, P., and Girshick, R. (2023). Seg-
ment anything.
Kuhn, H. (2012). The hungarian method for the assignment
problem. Naval Research Logistic Quarterly, 2.
Li, W., Liu, W., Zhu, J., Cui, M., Hua, X.-S., and Zhang,
L. (2022a). Box-supervised instance segmentation
with level set evolution. In Avidan, S., Brostow, G.,
Ciss
´
e, M., Farinella, G. M., and Hassner, T., editors,
Computer Vision – ECCV 2022, pages 1–18, Cham.
Springer Nature Switzerland.
Li, W., Liu, W., Zhu, J., Cui, M., Yu, R., Hua, X., and
Zhang, L. (2022b). Box2mask: Box-supervised in-
stance segmentation via level set evolution. arXiv.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll’a r, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Munawar, M. R. and Hussain, M. Z. (2023). Train yolov7
segmentation on custom data.
Sharma, R., Saqib, M., Lin, C. T., and Blumenstein, M.
(2022). A survey on object instance segmentation. SN
Computer Science, 3(6):499.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2023).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 7464–7475.
Wang, X., Kong, T., Shen, C., Jiang, Y., and Li, L. (2020a).
SOLO: Segmenting objects by locations. In Proc. Eur.
Conf. Comp. Vision (ECCV).
Wang, X., Zhang, R., Kong, T., Li, L., and Shen, C.
(2020b). Solov2: Dynamic and fast instance segmen-
tation. Proc. Advances in Neural Information Process-
ing Systems (NeurIPS).
Zwemer., M. H., Scholte., D., Wijnhoven., R. G. J., and
de With., P. H. N. (2022). 3d detection of vehicles
from 2d images in traffic surveillance. In Proceed-
ings of the 17th International Joint Conf. on Computer
Vision, Imaging and Computer Graphics Theory and
App. - Volume 5: VISAPP,, pages 97–106. INSTICC,
SciTePress.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
358
