
Leveraging VR and Force-Haptic Feedback for an Effective Training
with Robots
Panagiotis Katranitsiotis
a
, Panagiotis Zaparas
b
, Konstantinos Stavridis
c
and Petros Daras
d
The Visual Computing Lab, Centre for Research and Technology Hellas, Information Technologies Institute,
Thessaloniki, Greece
Keywords:
Training Framework, Virtual Environment, Force Feedback, Robot Manipulation, Kuka Robot,
Insect Farming.
Abstract:
The utilization of robots for numerous tasks is what defines automation in the industrial sector in the era we are
going through for multiple fields, including insect farming. As an outcome of this progression, human-robot
collaboration is becoming increasingly prevalent. Industrial workers must receive adequate training in order
to guarantee optimal operational efficiency and reduce potential risks connected with the use of high-value
machinery like robots given the precise and delicate handling requirements of these machines. Accordingly,
we propose a framework that integrates Virtual Reality (VR) technologies with force and haptic feedback
equipment. This framework aims to simulate real-world scenarios and human-robot collaboration tasks, with
the goal of familiarizing users with the aforementioned technologies, overcoming risks that may arise, and
enhancing the effectiveness of their training. The proposed framework was designed in regard to insect farming
automation domain with the objective of facilitating human-robot collaboration for workers in this field. An
experiment was designed and conducted to measure the efficiency and the impact of the proposed framework
by analyzing the questionnaires given to participants to extract valuable insights.
1 INTRODUCTION
Due to globalization and the growing demand for dis-
tinctive products, new challenges have emerged in
the industrial sector. Industries, in order to main-
tain their competitiveness in the mass production
model, needed to redesign their manufacturing sys-
tem (Braganc¸a et al., 2019). Therefore, the opera-
tion of robots became a key component by automat-
ing a variety of tasks and thus handling the constant
increase of demand which also corresponds to the ris-
ing of annual revenue. Consequently, a necessity for
humans to engage in collaborative efforts with robots
at an industrial level to boost overall productivity and
enhance efficiency has emerged. Thereby, the concept
of Industry 4.0 was introduced (Robla-G
´
omez et al.,
2017).
Industry 4.0 is envisioned as the fourth Industrial
revolution that signifies today’s industrial sector con-
sidering that technological leaps have a tremendous
a
https://orcid.org/0009-0004-6509-6338
b
https://orcid.org/0009-0001-5407-7295
c
https://orcid.org/0000-0002-3244-2511
d
https://orcid.org/0000-0003-3814-6710
impact on the growth and evolution of Industries. The
first field of mechanization (1st industrial revolution),
the immense usage of electricity (2nd industrial rev-
olution) and widespread digitalization (3rd industrial
revolution) characterized the industrial sector in the
past years (Lasi et al., 2014). The progression of tech-
nology and artificial intelligence entered the capabil-
ity of automation and more robust decision-making
mechanisms for industries, empowered with real-time
performance management systems, leading to Indus-
try 4.0 (Aoun et al., 2021).
Companies are progressively employing sensors
and wireless technologies to gather data on the en-
tire lifecycle of a product achieving smart manufac-
turing. These mechanisms are increasingly used to
accumulate data that contribute to product design and
manufacturing. In addition, the utilization of big data
analytics is also used to identify causes of failure as
well as to optimize product performance and enrich
production efficiency (Kusiak, 2017). A key chal-
lenge for smart manufacturing is to connect the phys-
ical and virtual spaces. The rapid evolution of sim-
ulations, data communication, and cutting-edge tech-
nologies created a new era in the interactions between
Katranitsiotis, P., Zaparas, P., Stavridis, K. and Daras, P.
Leveraging VR and Force-Haptic Feedback for an Effective Training with Robots.
DOI: 10.5220/0012319200003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 651-660
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
651

Figure 1: (a) Spatial Setup (b) SenseGlove (c) HTC Vive VR Headset and two Vive Trackers.
physical and virtual spaces (Tao et al., 2019). Digital
Twins integrate the physical and virtual data through-
out a product lifecycle. When combined with analysis
results of the collected data, can be used to improve
the performance of a process in the physical space,
hence is a vital feature of Industry 4.0 (Qi and Tao,
2018).
Industry 4.0 is characterized by humans and
robots having the same goal and following a sequence
of shared actions to achieve it (Weiss et al., 2021). For
the collaborative assignments between humans and
robots, humans need to be trained to ensure smooth
cooperation. Stemming from the unfamiliarity of hu-
mans with robots, which are expensive equipment re-
quiring precise manipulation and to mitigate risks per-
taining to the safety of humans during their coopera-
tion, proper and efficient training is mandatory.
Robots have already become a key component of
Industry 4.0 and have replaced many procedures that
have so far been performed manually and started to
move out of laboratory and manufacturing environ-
ments into more complex human working environ-
ments (Bauer et al., 2008). Collaboration between
humans and robots became an efficient way for en-
terprises to increase their productivity level while re-
ducing production costs and thereby increasing their
annual revenue (Matheson et al., 2019). Collaborative
robots, often referring as cobots (Colgate et al., 1996),
are designed with the purpose of working simultane-
ously with human workers to perform a specific task
in a much more productive and safer environment.
On a robotic environment, a novel form of train-
ing, overcoming risks associated with real equipment
to ensure the safety of the trainee, occurs. Human-
robot collaboration can be dangerous due to the high-
speed movements and massive forces generated by
industrial robots (Oyekan et al., 2019). Therefore,
digital training emerged through technologies such as
Virtual Reality (VR), force and haptic feedback, and
digital twins. In particular, digital twin, which is a
virtual replica of real-life objects that simulate their
behavior, not only enhances the training process but
also can enable the integration of cyber-physical sys-
tems (Hochhalter et al., 2014).
Based on a comprehensive review of several train-
ing mechanisms that utilize VR technologies, this
paper proposes an innovative and efficient training
framework in a robotic environment. Contrary to the
majority of VR training techniques that integrate VR
controllers of the respective VR headset, this frame-
work leverages force and haptic feedback gloves, and
more specifically Sense Glove, to enable the user’s
interactions within the virtual environment. These
gloves not only give the ability to the user to observe
his own hands in the VR but also provide realistic ma-
nipulation within the environment by applying force
and haptic feedback when an interaction with a VR
object occurs, which is not possible to be achieved by
utilizing only the controllers of a VR headset. Ad-
ditionally, cases, where force-feedback gloves were
integrated, are mainly involved healthcare and mil-
itary domains while the presented framework pro-
vides a novel and innovative industrial robotic envi-
ronment and training workflow where the user can
freely manipulate the robot with his hands and be
trained through this procedure by manually program-
ming a VR industrial robot.
Taking into account that the simplest way to pro-
gram a robot is its manual movement with hands, this
framework allows the user not only to observe a VR
environment that utilizes a 7 joints Kuka Robot but
also to interact with virtual objects and the robot it-
self by integrating Force and Haptic Feedback gloves,
with the purpose of his efficient training. Thereby, the
proposed VR training framework overcomes any po-
tential issues regarding highly expensive equipment
(i.e. Kuka robot) and gives the ability to users with no
prior robotic knowledge, to learn the kinematics and
limitations of the robot’s joints, to understand how the
robot needs to be moved to perform a specific task
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
652

and thus to achieve appropriate training. After the VR
training is completed the user will be able to interact
with the real robot more efficiently and safely.
To evaluate the realism of the VR environment and
hand interactions with the robot, an experiment was
conducted in which the participants needed to set the
robot for a specific task in an insect farm robotic en-
vironment. After the completion of the task, ques-
tionnaires were given to the participants to evaluate
the realism of the experience of the VR environment,
the movement of the robot by their own hands and
the training framework workflow. Statistical Anal-
ysis and correlation methods were performed to ex-
tract valuable insights along with Cronbach alpha test
to ensure the reliability of the questionnaires and the
overall contribution of the proposed haptic-based VR
framework and its impact on an effective and safer
human-robot collaboration environment.
2 RELATED WORK
Virtual Reality technology has immense significance
in various domains such as gaming, education, health-
care, and industry. It revolutionizes the user expe-
rience by providing the ability of transferring to a
computer-generated simulation place while also re-
defining the traditional training methods in a safer and
more efficient manner.
In healthcare, for instance, VR aids in patient
therapy and surgeon training. Previous work indi-
cated that simulation-based training can remarkably
decrease the mistakes of healthcare workers as well
as improve patient safety (Salas et al., 2005). VR-
based training is a promising area that can assess
task-specific clinical skills and simulate multifari-
ous medical procedures and clinical cases (O’Connor,
2019). These cases include orthopedic surgery (Laith
K Hasan and Petrigliano, 2021), neuroradiology pro-
cedures (Magnus Sundgot Schneider et al., 2023),
gunshot wounds (Dascal et al., 2017), and mental dis-
eases such as schizophrenia by creating a VR expe-
rience that puts participants on a city bus with addi-
tional surroundings like sights and sounds (Mantovani
et al., 2003). Consequently, a healthcare VR training
program that gives the ability to the trainee to interact
realistically with the necessary equipment overcomes
substantial risks and provides the essential skills be-
fore being applied to a real patient.
An efficient training mechanism in the VR is com-
prised of multiple critical elements. The most vital
component is the VR Headset which corresponds to
the display quality and the tracking motion of the
user’s head to provide the ultimate experience. At
present, the most popular VR hardware devices are
Oculus VR (Yao et al., 2014), HTC Vive, Valve Index
(Valve, 2019), and Samsung HMD Odyssey (Sam-
sung, 2021; Yildirim, 2020). The most important
features that categorize VR headsets are the display
quality, the motion tracking, and the VR controllers’
response. For instance, research indicates that an in-
creased level of visual realism improves the sense of
presence (Bowman and McMahan, 2007). All the
aforementioned VR headsets achieve a high level of
image quality using LCD and AMOLED displays to
provide an excellent three-dimensional environment
with a remarkable tracking system and are equipped
with VR controllers (Angelov et al., 2020).
Furthermore, in all training procedures, the
trainee’s hands must be visible within the the VR to
accomplish the desired educational level of the user
performing a specific task. VR controllers which are
available with most VR headsets, provide this ca-
pability but they lack of realistic interactions since
they exclusively map the user’s hand with the con-
troller and failing to deliver a sufficient hand simula-
tion within the VR.
On the contrary, force and haptic feedback gloves
leverage a realistic user interaction in VR. In (Whit-
mire et al., 2018), a haptic revolver was introduced
that offers the user’s ability to interact with surfaces
and perform tasks such as picking and placing of ob-
jects. Nevertheless, it does not provide the mapping
of fingers on the VR and is more similar to a VR con-
troller equipped with a haptic capability. Moreover,
research efforts in (Kim et al., 2017) led to the de-
velopment of a low-cost portable hand haptic system
designed as an Arduino-based sensor architecture for
each finger. Similar work was presented in (Martinez-
Hernandez and Al, 2022) in which researchers pro-
posed a wearable fingertip device for sliding and vi-
bration feedback in VR. The corresponding device
comprised an array of servo motors and 3D-printed
components. However, these research focus on appli-
cations outside of training workflows, and not in cases
where the movement of the hands must be precise by
applying the corresponding force-feedback such as in
industrial robotic domains. It is notable that in the lit-
erature these gloves are mostly employed preliminar-
ily in healthcare domains while it could be very ben-
eficial to be integrated into an industrial robotic field
to simulate realistic worker training for programming
robotic tasks.
In (P
´
erez et al., 2019), researchers proposed a sys-
tem utilizing a VR interface connected to the robot
controller providing the ability to control the virtual
robot. This system can be used for training, simula-
tion, and integrated robot control all in a cost-effective
Leveraging VR and Force-Haptic Feedback for an Effective Training with Robots
653

Figure 2: Virtual Environment for Training.
manner. They employed HTC Vive headset and uti-
lized its controllers for the interaction with VR but-
tons that move the robot. It must be noted that the
HTC Vive controllers cannot simulate the haptic ex-
perience in a realistic way.
Similarly, (Garcia et al., 2019) proposed Virtual
and Augmented Reality as means of optimizing train-
ing time and cost reduction. The application created
with Unity Pro enhanced the familiarization of their
system and procedures. META2 Development Kit
was selected as equipment, which is an Augmented
reality device. Again in that situation, emphasis was
not given to the haptic experience.
The majority of the research for Virtual Training
employed the controllers of each Virtual Headset for
the appropriate training. However, this training pro-
cess lacks intrinsically since the trainee is not capa-
ble of manipulating machines realistically, but only
limited to the controllers. Our proposed framework
utilizes not only VR for training but also force and
haptic feedback gloves enabling trainees to interact
with and manipulate realistically with VR objects in
a more intuitive manner. Particularly, Sense Gloves
were utilized for the force and haptic feedback capa-
bility combined with the HTC Vive VR headset along
with Vive trackers to map the hands into the VR en-
vironment. Thereby, the proposed framework con-
tributes an industry learning mechanism providing the
ability for the trainee to freely view the Virtual En-
vironment, interact with his own hands as if it was
a real physical environment, learn from it and kines-
theticaly interact with the VR robot and subsequently
learn how to program a robot efficiently.
3 THE PROPOSED
FRAMEWORK
The proposed framework was developed by leverag-
ing the capabilities of the open-source game devel-
opment engine, Unity3D. Unity3D offers numerous
features that facilitate the integration of multiple inde-
pendent modules into a cohesive environment (Haas,
2014). Additionally, the framework leverages the sup-
port for force and haptic feed-back gloves, Sense-
Glove, which enables natural interaction in VR En-
vironments and manipulation of VR objects.
Contrary to traditional controllers, SenseGlove
provides users with the ability to feel the size, stiff-
ness, and resistance, allowing a more realistic experi-
ence when pushing, holding, and touching virtual ob-
jects (SenseGlove, 2018). SenseGloves are exoskele-
ton gloves equipped with servo motors and tires that
can block the movement of the fingers. Accordingly,
whenever the user interacts with a virtual object, the
servos actuators block the tires, preventing the user
from closing his hand. Thereby they deliver the sense
of touching the object while also applying the ap-
propriate force and haptic feedback. Finally, a Vive
Tracker was attached to each of the Gloves to deliver
the capability of the free hand move within the VR
environment.
The HTC Vive headset, which is also supported
by Unity, is utilized in the framework to enable free
viewing and movement within the VR environment
(HTC, 2011). Moreover, two VR base stations are
placed to enhance the motion track of the headset and
the Sense Gloves. The complete hardware and spatial
setup are illustrated in Figure 1.
3.1 Virtual Training Environment
The virtual environment has been developed with the
intention of providing effective training to users re-
garding the automation in insect farming domain.
This environment is a virtual training room that has
been designed to simulate real-world scenarios . In
particular, an industrial level robot, Kuka IIWA 7,
was chosen to carry out robotic tasks in the VR train-
ing room, as depicted in Figure 2. A 3D crate con-
taining animated worms and substrate was placed in
front of the Kuka in which the robot assists in qual-
ity management tasks (i.e. scanning crate). In ad-
dition, the SenseGlove technology has been utilized
to allow users to see a virtual representation of their
hands. This technology also enables users to manipu-
late the Kuka robot freely within the designated area,
while taking into account the robot’s joint limitations.
Furthermore, a table with two VR buttons has
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
654

Figure 3: Kuka Robot Manipulation in VR.
been installed within the interaction VR area. The
main objective of these buttons is to record the robot’s
movement and display it on the corresponding VR
screen. Therefore, the users and their trainees can
evaluate the task and identify the optimal robot ma-
nipulation movement for this specific task.
Overall, this virtual environment is designed to
provide users with a practical and hands-on experi-
ence in a simulated training room. It incorporates
cutting-edge technologies such as VR, SenseGlove,
and a 3D model of the Kuka IIWA 7 robot to simulate
real-world scenarios and enable users to acquire prac-
tical skills that can be applied in real-world situations.
The corresponding robot is an exact representation of
the real 7 joint Kuka one in Unity 3D by respecting
its mass, torque, stiffness, acceleration and all the at-
tributes that affect its movement.
3.2 Training Procedure
In numerous tasks, there may be a requirement for
the manual movement of a robot, such as in the case
of insect farming, where the robot must be manually
moved to scan a crate of insects. This manual robotic
movement is valuable for workers lacking prior exper-
tise in robot manipulation, particularly in program-
ming a robotic task. The robot records the user’s man-
ual movement and replicates the exact trajectory. A
significant application of this method within insect
farming is the visual inspection of the crate where
a camera is attached to the robot’s end-effector and
must be positioned above the crate to capture images
and perform the corresponding visual inspection (e.g.
using AI algorithms).
The movements necessary for this task require
precise and careful handling of the robot. A realistic
and sufficient utilization of hand manipulation within
the VR occurred. Therefore, Sense Glove was inte-
grated in conjunction with the VR training framework
which allows the user not only to perceive his hands
Figure 4: Framework Setup.
on the VR but also touch and move the robot realis-
tically by applying Force and Haptic Feedback tech-
nology. To achieve an effective training for this task,
the user, wearing the aforementioned equipment, as
depicted on Figure 4, manually moves and interacts
with the robot in a natural manner, provided with the
appropriate force feedback and hence be familiarized
with its kinematics. Finally, using the VR recording
button the user can record the robot’s movement and
display it on the screen for evaluation purposes.
Particularly, using the proposed framework, the
user is first able to move freely within the VR envi-
ronment and interact with both the robot and other
components of the environment, as depicted on Fig-
ure 3. As the user gains confidence in manually mov-
ing the robot, he records the robot’s movements using
the green VR button and after completing the task,
stops the recording by pressing the red one. The cor-
responding recorded movement is then displayed on
the VR screen and is visible to the employee, as de-
picted on Figure 5. It can also be evaluated along with
his trainee for its precision and accuracy and can be
further analyzed to determine the most optimal move-
ments for this assigned task.
For instance, in the terms of insect farming, the
Leveraging VR and Force-Haptic Feedback for an Effective Training with Robots
655

worker can be trained in this Virtual environment, to
lower the end-effector of the Kuka Robot above the
crate in order to perform its scanning to assist the
quality management of insects prior to executing the
task given the real robot.
3.3 Experiment
An experiment aimed to evaluate the realism and the
efficiency of the proposed VR training environment
and the manipulation of the Kuka Robot was con-
ducted. The established setup was created according
to Figure 1, in which the two HTC Vive Base Sta-
tions were positioned to configure the VR space and
to track the movement of both the headset and the
Sense Gloves (by utilizing two Vive Trackers attached
to each hand). The application for the experiment was
created in Unity, utilized the SteamVR plugin, and ran
on the NVIDIA GeForce RTX 3090 GPU with 24GB
memory to maximize frames per second (FPS) and
to avoid potential motion sickness that the user might
experience.
Figure 5: VR Screen to evaluate robot’s recorded move-
ment.
The experiment was conducted by involving 25
participants with no prior expertise in robot manip-
ulation. Each participant was equipped with the nec-
essary hardware and was initially asked to familiar-
ize himself with the VR environment and freely move
within this environment. Afterward, participants en-
gaged in manual manipulation of the robot with their
hands to learn the kinematics and limitations of each
joint. Accordingly, each participant was assigned the
same task which consisted of a sequence of actions.
Particularly:
• Lower the robot’s end-effector and position it
above the crate
• Press the green button in order to record the up-
coming movement
• Move the robot to scan the crate
• Press the red button to stop the recording
After the recording was stopped, the movement
was displayed on the VR display in order to eval-
uate whether the corresponding robot manipulation
was the optimal one for the given task. Otherwise,
the participants had the option of pressing again the
green button and repeating the procedure.
Following the completion of the experiment, a
questionnaire was provided to each participant aimed
to evaluate the realism of the experience in combi-
nation with the hand manipulation of the robot and
to analyze valuable insights. The questionnaire items
are detailed in Table 1.
Table 1: Questions.
Questions
Q1 Do you have any prior experience with VR?
Q2 Were the SenseGlove easy to use?
Q3 Was the VR Headset easy to use?
Q4
Did you experience nausia or motion
sickness? (1: Not at all)
Q5
How would you rate the force-feedback
while interacting with the Kuka Robot?
Q6
Was the process of the training framework
easy to undertand?
Q7 Was the VR interface easy to understand?
Q8
How impactful was moving the robot for
your training?
Q9
How impactful was the recording process of
robot movement?
Q10
How would you rate the realiability of the
training framework?
Q11
Do you consider that this framework leads
to a safer human robot collaboration scheme?
Q12
Do you consider the training framework to be
useful tool in your work?
Q13
Would you recommend using a similar VR
framework in other jobs similar to yours?
3.4 Results
The duration of the experiment was approximately 20
minutes per participant including the time required for
wearing the essential equipment. Furthermore, de-
tailed instructions were provided to users about the
utilization of Sense Gloves and VR headset along
with comprehensive guidance during the conduction
of the experiment to ensure the proper execution of
the procedures.
The questionnaires provided to the participants
consisted of a total of 13 inquiries, divided into two
categories: five regarding the realisticness of the
robotic manipulation and eight concerning the reli-
ability of the training framework. Participants pro-
vided their feedback using a scale ranging from 1 to
5. The lowest value of the scale corresponded to 0%
while the highest one represented 100%.
To ensure that the questionnaire produces accurate
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
656
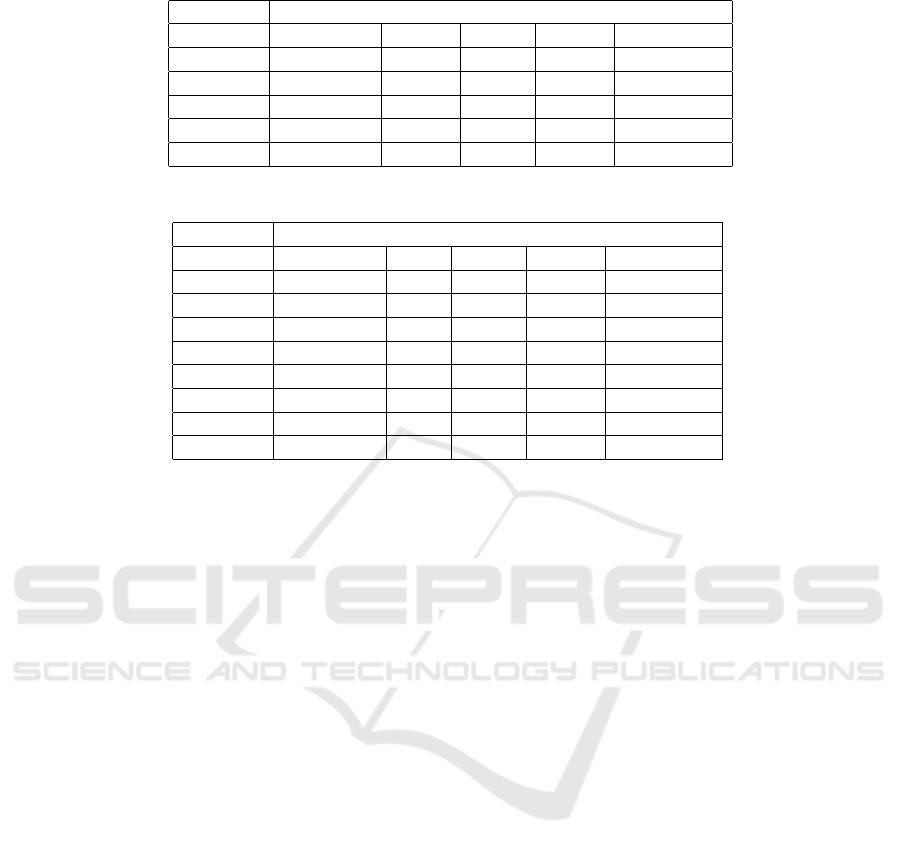
Table 2: Evaluation of the manipulation’s realism.
Answer
Question 1 (Lowest) 2 3 4 5 (Highest)
Q1 26.1% 47.9% 17.4% 8.6% 0%
Q2 0% 4.3% 21.7% 26.2% 47.8%
Q3 0% 0% 4.3% 39.1% 56.6%
Q4 97.9% 2.1% 0% 0% 0%
Q5
0% 3.4% 11.4% 64.8% 20.4%
Table 3: Reliability of the VR Training Framework.
Answer
Question 1 (Lowest) 2 3 4 5 (Highest)
Q6 0% 0% 0% 41.7% 58.3%
Q7 0% 0% 4.1% 29.2% 66.7%
Q8 0% 0% 20.8% 37.5% 41.7%
Q9 0% 0% 15.4% 30.4% 54.2%
Q10 0% 0% 0% 58.3% 41.7%
Q11 0% 0% 25% 41.7% 33.3%
Q12 0% 8.7% 8.7% 26.1% 56.5%
Q13 0% 4.2% 8.3% 20.8% 66.7%
and reliable results, it is essential to test its reliability.
Therefore, Cronbach Alpha Test (Bland and Altman,
1997) was performed, particularly for questions 11,
12, and 13. The Cronbach Alpha between Q11 and
Q12 is 0.749 and between Q12 and Q13 is 0.879 ac-
cordingly. Both indicate a good realiability and inter-
nal consistency.
Both the training framework and the robotic ma-
nipulation provided efficient and valuable outcomes.
As illustrated in Table 2, most of the participants had
no prior experience with Virtual Reality Technolo-
gies. Nevertheless, they found that SenseGlove uti-
lization and VR headset were easy to use and 97.9%
of them did not encounter any kind of nausea or mo-
tion sickness. The force and haptic feedback dur-
ing interactions with the robot define the realistic-
ness of the manipulation because it portrays the sense
of touching and moving objects like in real world.
The majority of the participants (precisely 85.2% of
them), rated the force feedback with 4 and 5 indicat-
ing a highly realistic interaction with the robot.
Considering the competence and the impact of our
proposed framework, the majority of the participants
rated the training workflow with more than 75% by
scoring 4 and 5 the corresponding questions, as il-
lustrated in Table 3. As depicted in the descriptive
statistics in Table 4 all the mean values regarding the
competency of the framework are above 3 suggest-
ing the efficiency of the proposed VR training mech-
anism. In particular, apart from Q5, all the variables
have a score above 4. The reason behind this is that
SenseGlove may not provide the corresponding feed-
back efficiency for creating the ultimate manipulation
experience in VR. Nevertheless, the 3.83 mean score
of the Sense Glove is significant enough and provides
adequate training to inexperienced users as illustrated
by the mean value of Q10. Consequently, all partici-
pants found our framework easy to understand while
reliable to provide sufficient training to users lacking
robotic expertise. Additionally, they rated both the
provided robot task and recording procedure as intu-
itive for effective training.
Additionally, Pearson correlation (Sedgwick,
2012) was used to examine the relationship between
the previous participant’s experience with VR and
Kuka Robot Manipulation to the reliability of the pro-
posed framework. The Pearson correlation between
the past VR experience (Q1) and the competence of
the robotic movement (Q7) stands at 0.36 indicating
a lack of relation between them. Moreover, it is note-
worthy that the Pearson correlation between the past
expertise with Kuka Robot and the training frame-
work is 0.0017 confirming the independence of these
variables.
The independence of these variables is vital for the
realism and particularly for the impact of our frame-
work since otherwise the efficiency of the proposed
framework will be biased by users who already ex-
perienced similar technologies. On the contrary, the
primary objective is to train inexperienced users to
manipulate Kuka Robot by utilizing VR technologies.
Therefore, it is concluded that the prior knowledge
and manipulation of Kuka Robot and the prior ex-
perience with VR do not affect the intuition of the
Leveraging VR and Force-Haptic Feedback for an Effective Training with Robots
657
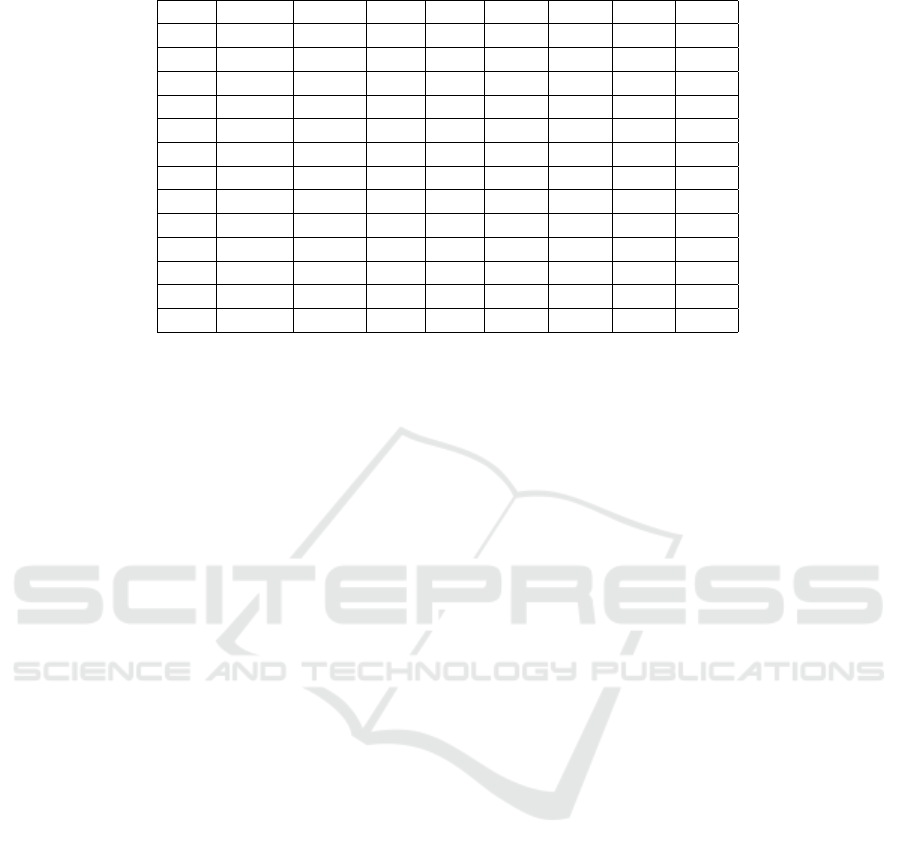
Table 4: Descriptive Statistics.
Count Mean std Min 25% 50% 75% Max
Q1 25 2.16 0.96 1 1.75 2 3 4
Q2 25 1.79 1.35 1 1 1 2 5
Q3 25 4 0.83 2 3.75 4 5 5
Q4 25 4.54 0.58 3 4 5 5 5
Q5 25 1.04 0.20 1 1 1 1 2
Q6 25 4.41 0.65 3 4 4.5 5 5
Q7 25 4.62 0.57 3 4 5 5 5
Q8 25 4.21 0.78 3 4 4 5 5
Q9 25 4.33 0.86 2 4 4 5 5
Q10 25 4.16 0.63 3 4 4 5 5
Q11 25 4.08 0.77 3 3.75 4 5 5
Q12 25 4.29 0.95 2 4 5 5 5
Q13 25 4.5 0.83 2 4 5 5 5
framework, hence the proposed training framework is
highly valuable and efficient. Moreover, the Pearson
Correlation comparing the reliability of the frame-
work (Q10) and its impact on a safer human-robot
collaboration environment (Q11) stands at 0.67 sug-
gesting their notable relation between. Accordingly,
apart from effective training, the proposed framework
additionally results in a more secure human-robot col-
laboration scheme.
Consequently, this mechanism simulates effi-
ciently the real movement and manipulation of the
robot, thereby providing sufficient and secure training
to new users in a robotic environment.
4 CONCLUSION AND FUTURE
WORK
The presented framework provided an innovative
training methodology, implemented in VR, able for
the user to intrinsically interact with robots, to ana-
lyze and understand their kinematics and joint limita-
tions and to overcome possible risks while operating
real world robots. Therefore, it contributes to the ef-
fective training of employees in human-robot collab-
oration schemes and thus will ensure wariness when
the actual task on the real robot has to occur.
The conduction of our experiment resulted in a
highly realistic VR environment concerning the in-
sect farming domain and a 7-joint Kuka IIWA robot
while also providing a realistic simulation of the hand
interaction and manipulation of the corresponding
robot. Therefore, the proposed framework, leverag-
ing VR with force and haptic feedback technologies,
achieves effective training for non-expertise employ-
ees securely by overcoming any potential risks while
handling highly expensive equipment i.e. robots. Ad-
ditionally, the regular use of this mechanism will raise
the confidence and the safety of the employees deal-
ing and working with robots while reducing the uncer-
tainty when the real robot task occurs. Consequently,
it is a vital component for new robot users to simply
learn how to program a robot task safely correspond-
ing to their needs while they have been trained funda-
mentally in VR.
The majority of the Virtual Training methods uti-
lize the controllers of the corresponding VR head-
set that they use resulting in a limitation of hands-
on experience and real interactions within VR lack-
ing an effective simulation in reality. On the contrary,
our proposed framework that utilizes force and hap-
tic feedback gloves overcomes this limitation and im-
proves the realistic experience of the user. In the liter-
ature, only in a few cases, VR force-feedback gloves
are integrated for training purposes and observed pri-
marily in the healthcare domain. However, our train-
ing framework acts as an educational tool for inexpe-
rienced users (provides the ability to learn the kine-
matics and constraints of robotic joints) and is an in-
novative approach to program robotic tasks that could
be further expanded as a digital twin of an actual
robot.
For future work, robotic joint data will be gath-
ered with their timing characteristics from the real
robot to be transferred in the VR robotic digital twin
in order to provide a more realistic experience. Hav-
ing constructed the realistic digital twin of the Kuka
robot, the proposed framework will be further utilized
to program the actual robot by non-technical workers.
Specifically, the ultimate goal is the robot’s movement
in the Virtual Environment to correspond to the move-
ment of the real robot. By utilizing the VR train-
ing room, the user can analyze the recorded move-
ments of the robot and determine the optimal trajec-
tory path. Thereby, the user can transfer the corre-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
658

sponding movement to the physical robot by pressing
a designated VR button. This process can enhance the
existing human-robot collaboration schemes in terms
of of human safety and robot integrity (avoiding dam-
age).
ACKNOWLEDGMENTS
The work presented in this paper was supported by
the European Commission under contract H2020 -
101016953 CoRoSect.
REFERENCES
Angelov, V., Petkov, E., Shipkovenski, G., and Kalushkov,
T. (2020). Modern virtual reality headsets. In 2020 In-
ternational congress on human-computer interaction,
optimization and robotic applications (HORA), pages
1–5. IEEE.
Aoun, A., Ilinca, A., Ghandour, M., and Ibrahim, H. (2021).
A review of industry 4.0 characteristics and chal-
lenges, with potential improvements using blockchain
technology. Computers & Industrial Engineering,
162:107746.
Bauer, A., Wollherr, D., and Buss, M. (2008). Human–
robot collaboration: a survey. International Journal
of Humanoid Robotics, 5(01):47–66.
Bland, J. M. and Altman, D. G. (1997). Statistics notes:
Cronbach’s alpha. Bmj, 314(7080):572.
Bowman, D. A. and McMahan, R. P. (2007). Virtual re-
ality: How much immersion is enough? Computer,
40(7):36–43.
Braganc¸a, S., Costa, E., Castellucci, I., and Arezes, P. M.
(2019). A brief overview of the use of collaborative
robots in industry 4.0: human role and safety. Occu-
pational and environmental safety and health, pages
641–650.
Colgate, J. E., Wannasuphoprasit, W., and Peshkin, M. A.
(1996). Cobots: Robots for collaboration with hu-
man operators. In ASME international mechanical
engineering congress and exposition, volume 15281,
pages 433–439. American Society of Mechanical En-
gineers.
Dascal, J., Reid, M., IsHak, W. W., Spiegel, B., Recacho,
J., Rosen, B., and Danovitch, I. (2017). Virtual re-
ality and medical inpatients: A systematic review of
randomized, controlled trials. Innov. Clin. Neurosci.,
14(1-2):14–21.
Garcia, C. A., Naranjo, J. E., Ortiz, A., and Garcia, M. V.
(2019). An approach of virtual reality environment
for technicians training in upstream sector. Ifac-
Papersonline, 52(9):285–291.
Haas, J. K. (2014). A history of the unity game engine.
Hochhalter, J., Leser, W. P., Newman, J. A., Gupta, V. K.,
Yamakov, V., Cornell, S. R., Williard, S. A., and
Heber, G. (2014). Coupling damage-sensing particles
to the digitial twin concept - nasa technical reports
server (ntrs).
HTC (2011). Htc vive. Accessed on April 2023.
Kim, M., Jeon, C., and Kim, J. (2017). A study on immer-
sion and presence of a portable hand haptic system for
immersive virtual reality. Sensors, 17(5).
Kusiak, A. (2017). Smart manufacturing must embrace big
data. Nature, 544:23–25.
Laith K Hasan, Aryan Haratian, M. K. I. K. B. A. E. W. and
Petrigliano, F. A. (2021). Virtual reality in orthopedic
surgery training. Advances in Medical Education and
Practice, 12:1295–1301.
Lasi, H., Fettke, P., Kemper, H.-G., Feld, T., and Hoff-
mann, M. (2014). Industry 4.0. Bus. Inf. Syst. Eng.,
6(4):239–242.
Magnus Sundgot Schneider, K. O. S., Kurz, K. D., Dalen,
I., Ospel, J., Goyal, M., Kurz, M. W., and Fjetland,
L. (2023). Metric based virtual simulation training for
endovascular thrombectomy improves interventional
neuroradiologists’ simulator performance. Interven-
tional Neuroradiology, 29(5):577–582.
Mantovani, F., Castelnuovo, G., Gaggioli, A., and Riva, G.
(2003). Virtual reality training for health-care profes-
sionals. Cyberpsychology & behavior: the impact of
the Internet, multimedia and virtual reality on behav-
ior and society, 6:389–95.
Martinez-Hernandez, U. and Al, G. A. (2022). Wearable
fingertip with touch, sliding and vibration feedback
for immersive virtual reality. In 2022 IEEE Interna-
tional Conference on Systems, Man, and Cybernetics
(SMC), pages 293–298.
Matheson, E., Minto, R., Zampieri, E. G., Faccio, M.,
and Rosati, G. (2019). Human–robot collaboration
in manufacturing applications: A review. Robotics,
8(4):100.
Oyekan, J. O., Hutabarat, W., Tiwari, A., Grech, R., Aung,
M. H., Mariani, M. P., L
´
opez-D
´
avalos, L., Ricaud,
T., Singh, S., and Dupuis, C. (2019). The effec-
tiveness of virtual environments in developing collab-
orative strategies between industrial robots and hu-
mans. Robotics and Computer-Integrated Manufac-
turing, 55:41–54.
O’Connor, S. (2019). Virtual reality and avatars in health
care. Clinical Nursing Research, 28(5):523–528.
P
´
erez, L., Diez, E., Usamentiaga, R., and Garc
´
ıa, D. F.
(2019). Industrial robot control and operator training
using virtual reality interfaces. Computers in Industry,
109:114–120.
Qi, Q. and Tao, F. (2018). Digital twin and big data to-
wards smart manufacturing and industry 4.0: 360 de-
gree comparison. IEEE Access, 6:3585–3593.
Robla-G
´
omez, S., Becerra, V. M., Llata, J. R., Gonz
´
alez-
Sarabia, E., Torre-Ferrero, C., and P
´
erez-Oria, J.
(2017). Working together: A review on safe human-
robot collaboration in industrial environments. IEEE
Access, 5:26754–26773.
Salas, E., Wilson, K. A., Burke, C. S., and Priest, H. A.
(2005). Using simulation-based training to improve
Leveraging VR and Force-Haptic Feedback for an Effective Training with Robots
659

patient safety: what does it take? Jt. Comm. J. Qual.
Patient Saf., 31(7):363–371.
Samsung (2021). Samsung. Accessed on October 2023.
Sedgwick, P. (2012). Pearson’s correlation coefficient. Bmj,
345.
SenseGlove (2018). Senseglove. Accessed on April 2023.
Tao, F., Zhang, H., Liu, A., and Nee, A. Y. C. (2019). Dig-
ital twin in industry: State-of-the-art. IEEE Transac-
tions on Industrial Informatics, 15(4):2405–2415.
Valve (2019). Valve. Accessed on October 2023.
Weiss, A., Wortmeier, A.-K., and Kubicek, B. (2021).
Cobots in industry 4.0: A roadmap for future practice
studies on human–robot collaboration. IEEE Transac-
tions on Human-Machine Systems, 51(4):335–345.
Whitmire, E., Benko, H., Holz, C., Ofek, E., and Sinclair,
M. (2018). Haptic revolver: Touch, shear, texture,
and shape rendering on a reconfigurable virtual reality
controller. pages 1–12.
Yao, R., Heath, T., Davies, A., Forsyth, T., Mitchell, N., and
Hoberman, P. (2014). Oculus vr best practices guide.
Oculus VR, 4:27–35.
Yildirim, C. (2020). Don’t make me sick: investigating the
incidence of cybersickness in commercial virtual real-
ity headsets. Virtual Reality, 24(2):231–239.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
660
