
A Study of Real World Information Mapping for Information
Sharing Using Edge Devices
Takenori Hara
a
and Hideo Saito
b
Keio University, 3-14-1 Hiyoshi, Kohoku-ku, Yokohama, Kanagawa, 223-8522, Japan
Keywords: Digital Twin, Information Sharing, Edge Device.
Abstract: We are developing a service platform to achieve use cases such as finding people in trouble and sharing them
with AR applications to ask for help from the people around them, finding information about a sale at a store
and sharing it with a map service, or alerting the police when a crime occurs, as well as quickly alerting the
people around them. Our system detects "objects" and "events" in the real world using edge devices that can
share the detected information in cyberspace so that the users can remotely obtain real-world information
from distant locations. We believe our system can make life more safe and convenient. In this paper, we report
on the findings from our experiments on searching for lost dogs by mapping object recognition results, on
mapping bird habitat areas by environmental sound recognition results, and on mapping public facility
announcement voices by speech recognition results.
1 INTRODUCTION
1.1 Research Background
Maps have been used as a means of sharing
information that exists in the real world.
Conventional maps are symbolic descriptions of
information that exists in the real world, as deemed
necessary by the author, and the update rate of this
information is slow. For example, the Geospatial
Information Authority of Japan's Ministry of Land,
Infrastructure, Transport, and Tourism updates its
"Fundamental Geospatial Data" four times a year
(Geospatial Information Authority of Japan, 2022.),
which is the basis for all electronic maps in Japan. In
other words, conventional maps are suitable for
sharing information that does not move or change in
a short period, such as roads and buildings, but not for
sharing information that moves and changes in real
time.
Recently, some services share the latest
information by recognizing images of printed maps
with an edge device such as an iPad and displaying
information about the location in AR. For example,
Figure 1 was the AR system that used at an exhibition
a
https://orcid.org/0000-0002-7699-0376
b
https://orcid.org/0000-0002-2421-9862
of MANGA. When an iPad is held over a printed map,
the AR system displays information according to the
map location. However, this information also needs
to be updated manually. On the other hand,
smartphones provide services to watch over children
by displaying the user's location on a map and to
facilitate merging in congested areas. This is a service
that shares the location information of users.
However, these services are limited to sharing
information among users who own specific devices
such as smartphones and have permission to share
information.
Figure 1: Jojo's Bizarre Adventure AR MAP
(Sendai Keizai. 2012.).
Hara, T. and Saito, H.
A Study of Real World Information Mapping for Information Sharing Using Edge Devices.
DOI: 10.5220/0012317500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
477-484
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
477

1.2 Research Objectives
Therefore, we are working on the construction of a
platform that recognizes and stores all kinds of
information that exists in the real world and shares it
with others. We believe our system can make life
more safe and convenient. We had evaluated a
prototype system in which edge devices evaluate and
share the safety of a location so that others can
recognize safe areas, and the system displays safe
routes in AR on HMDs and other devices to enable
safe travel (Hara and Saito, 2023.).
Then, we are developing a system that detects
"objects" and "events" in the real world using edge
devices that can share the detected information
among them in the cyberspace so that the users can
remotely obtain real world information from distant
locations. We aim for the system can be the
foundation for creating Society 5.0, the digital twin of
the real world, as proposed by the Japanese Cabinet
Office (Cabinet Office of Japan, 2022) Sharing
information on objects and events in the real world
can contribute to solving various social problems,
such as urban planning to prevent crimes, support
services to maintain social distance in infectious
disease environments such as COVID-19, detecting
people in trouble and automatically asking for help
from people around them, support services to protect
wild animals, and services to find lost dogs.
In this paper, we report on the findings and
problems encountered in developing the prototype
system that detects "objects" and "events" in the real
world using edge devices that can share the detected
information among them in cyberspace.
2 RELATED WORKS
Methods for detecting and sharing information about
"objects" and "events" that exist in the real world have
been widely proposed, and some of them are already
available as services.
2.1 Detection of "Objects" and
"Events" in the Real World
Many machine-learning-based object detection
methods have been proposed for detecting "objects"
in the real world. A representative algorithm is the
real-time object detection algorithm YOLO (Redmon
et al, 2016). It has already been used in services such
as analysis of customers visiting a store and traffic
volume surveys. Environmental sound recognition is
also important for detecting "events" occurring in the
real world. Environmental sound recognition is a
technique for detecting and recognizing a wide
variety of sounds that occur in our surroundings, such
as human speech, dog barking, and alarm sounds, and
many methods have been proposed (Karol,
2015)(Tokozume and Harada, 2017)(Qiuqiang et al,
2020). By analyzing environmental sounds, it is
possible to detect events occurring in the real world.
Many methods have also been proposed to detect
"events" occurring in the real world by analyzing
social networking posts (Ling and Abhishek,
2009)(Ryong and Kazutoshi, 2010)(Sakaki et al,
2010). These methods extract information about
events such as artists' live performances, earthquakes,
and traffic jams, as well as the locations where these
events occurred. Walther et al. proposed a method to
detect event information by detecting a spike in the
number of posts with location information by region
(Walther and Kaisser, 2013). Kim et al. propose a
method to analyze real-time geotagged posts on social
media and estimate the level of danger in an area in
real time (Kim et al, 2014).
2.2 Sharing of "Objects" and "Events"
in the Real World
As a mechanism for sharing detected “events” and
"events", Mobileye's Road Experience Management
(REM), a system that automatically creates maps for
automated driving, can be used as a reference
(Mobileye, 2023). REM automatically collects road
data with sensors (cameras, LiDAR, GNSS, etc.)
mounted on vehicles and uploads it to a cloud server,
where the system identifies and removes moving
objects such as vehicles, people, and bicycles to
automatically create/update maps for automated
driving. The smartphone application "FixMyStreet
Japan" is a service for sharing local problems such as
damaged roads, graffiti, broken streetlights, illegal
dumping, etc. Users take pictures using their
smartphones and share them, and the administration
responds (FixMyStreet Japan, 2023). The "Yahoo!
Weather Forecast" aggregates the weather
information posted by users and displays it as the
current weather(Yahoo Weather Forecast, 2023). The
disaster map of the "Yahoo! Disaster Prevention
App" allows users to post and share information about
each other's situation in the event of a disaster (Yahoo
Disaster Prevention, 2023). In smartphones, functions
for sharing users' location information are
implemented at the OS level and also provided as a
service through applications. Apple's iOS has a
function for sharing users' location information,
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
478
allowing users to notify their location information to
friends, family, etc. (Apple, 2023).
Apps such as LINE HERE and Life360 have a
function that displays the location of members
participating in a group on a map and notifies them
when a member reaches a specific area. For example,
a notification is automatically sent when a child
arrives at school and can be used as a watch-over
application (LINE HERE, 2023)(Life360, 2023).
Glympse is a service that provides a URL where users
can check their location. Anyone can access that URL
to get the user's location information. This facilitates
meeting up in crowded places (Glympse, 2023).
Sukru et al. propose a mobile app for the social
distancing of people in a COVID-19 environment. It
allows each user to manually register their health
status and then share their current location on the
network in real-time, predicting the walking paths of
other users and alerting them with sound and
vibration to the possibility of approaching users with
poor health status (Sukru et al, 2021). Maria et al.
proposed a method that uses BLE beacons to detect
and share a user's location and provide a route to
reach a destination without passing other people
indoors (Maria et al, 2020). Yizhou et al. conducted a
safe route search simulation experiment on an actual
congestion dataset for each Paris train station based
on another research result that "higher congestion
leads to higher crime rate" and confirmed the
effectiveness of the method (Yizhou et al, 2019.).
The freshness, spatial resolution, and accuracy of
the detected "objects" and "events" are important for
sharing information with others. Ideally, "objects"
and "events" in the real world should be
detected/shared in real-time and evaluated by an
impartial third party with a spatial resolution of about
3.5 m, which is hard to reach the other party but
allows for easy conversation. However, services that
share "objects" detected by edge devices in real-time
have not yet been offered as a service for general
consumers, although progress has been made in the
aforementioned automated driving. In addition, the
aforementioned research and services for detecting
"events" are based on the analysis of users' postings,
which lack real-time performance, cannot guarantee
reliability, and do not have sufficient spatial
resolution.
Today, everyone carries a smartphone and shares
information about "objects" and “events” in the real
world via social networking services. Shortly, we
believe it will be commonplace to wear wearable
computers like Google Glass or to have single-board
computers like NVIDIA's Jetson installed throughout
the city. We want to realize a future in which these
edge devices detect and automatically share "objects"
and “events” in the real world on behalf of people.
For example, we would like to provide a service that
automatically displays this information on a map or
HMD when an edge device detects someone who is
lost and in trouble, or when it finds information about
a discount at a store. Although there are concerns
about privacy violations, this system could be applied
to prevent users from approaching crime scenes or
people who look dangerous, to help users maintain a
safe distance in infectious disease environments such
as COVID-19, to support wildlife protection by
sharing the type and location of detected animals, or
to even locating lost dogs in the neighborhood. We
believe that by developing this system, we can
contribute to solving a variety of social issues. To
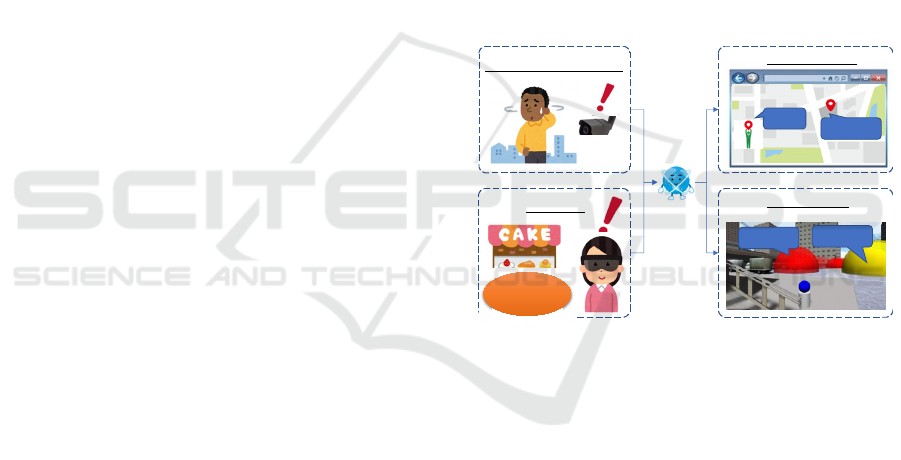
achieve the future shown in Figure 2, we are
conducting research, development, and social
implementation of information-sharing systems for
"objects" and "events" in the real world.
Figure 2: Use Cases Realized by this Research.
3 REAL WORLD INFORMATION
DETECTING AND SHARING
SYSTEM USING EDGE
DEVICES
3.1 System Overview
To achieve the future scenario shown in Figure 2, we
develop a system in which edge devices detect and
classify "objects" and " events" and share this
information with other edge devices. We have studied
the system configuration to achieve these future
scenarios. Figure 3 shows the system overview. The
edge device detects and classifies objects captured by
the camera, records sound of the scene, and uploads
the information together with position coordinates
Trouble︖
Sharing on Map
Sharing on AR
Deal︕
Trouble︖
Deal︕
Detect people in trouble
Find Deals
Low
Price!
A Study of Real World Information Mapping for Information Sharing Using Edge Devices
479
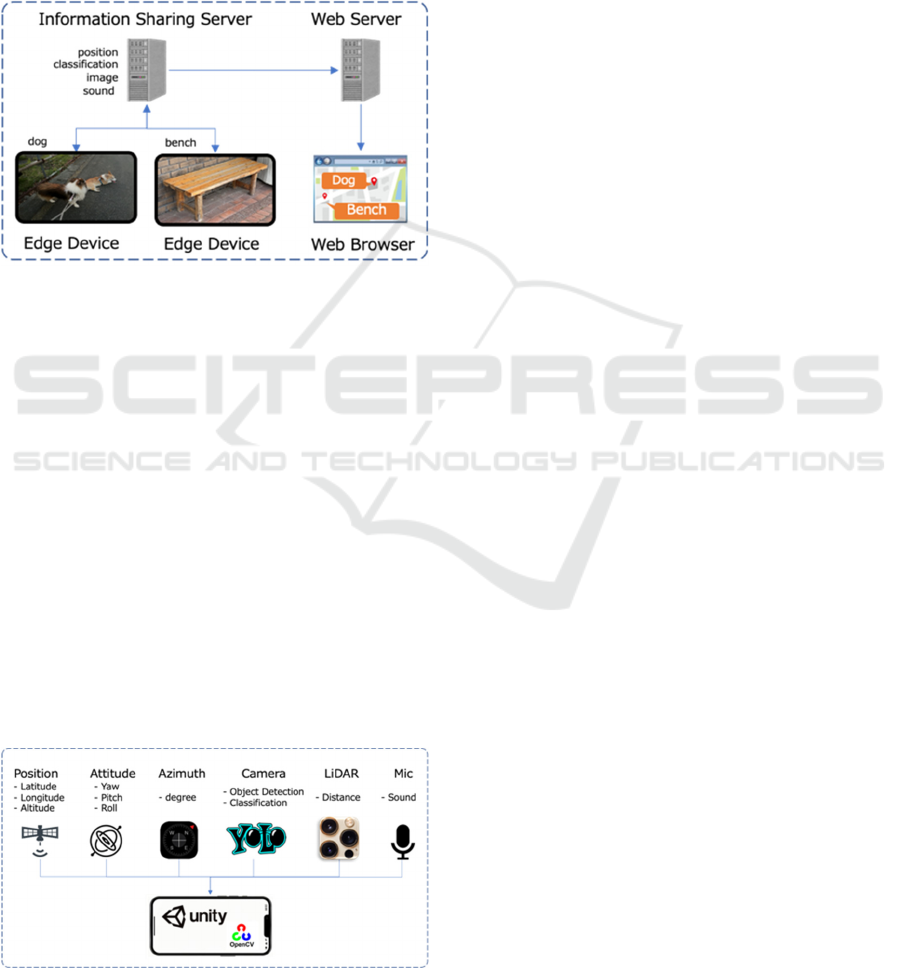
(latitude, longitude, and altitude) obtained from
GNSS to the information sharing server.
The information sharing server stores information
uploaded from edge devices and performs sound
recognition and classification.
The Web server retrieves information on detected
objects and events from the information sharing
server and maps them on a Google Map. Then, the
user can know "Where objects are" and "What is
going on?" in real time via a web browser.
Figure 3: System Overview.
As shown in Figure 4, we implemented a
prototyping application on an iPhone 13 Pro Max
using Unity. The system uses Tiny YOLO v4 to
detect and classify objects in the image captured by
the camera, gets the distance to the object using
LiDAR, and records audio on the spot using
directional microphones. Next, the system gets the
device's position coordinates (latitude, longitude, and
altitude) from the GNSS, the azimuth angles the
device is facing from the magnetic compass, and the
device's attitude (Yaw, Pitch, and Roll) from the gyro
sensor. The system then calculates the position
coordinates (latitude, longitude, and altitude) of the
detected object based on the device's position
coordinates, azimuth angle, orientation, and distance,
and uploads the detected object information (position
coordinates, classification, object image, and sound)
to the sharing server.
Figure 4: Prototype application.
3.2 Prototype System Experimental
Results
To verify whether our prototype system can achieve
the future scenario described at the end of Chapter 2,
we conducted two experiments.
3.2.1 Lost Dog Finding Experiment (Object
Detection Experiment)
Following the use case described in Chapter 2, we
experimented to verify whether our system can find
and track a lost dog. In this scenario, a person
searches for a dog that has run away. First, assuming
a dog ran away, person A took the dog out for a walk
without telling the dog's owner B where they were
going. Person A, who also had the role of collecting
information with an edge device, walked around the
neighborhood with a smartphone which installed a
prototype application. The prototype application
uploaded the detected and classified object
information (position coordinates, classification
information, object image, sound, and time) to an
information sharing server. Figure 5 shows a screen
capture of the application. Figure 5-(1) shows the
bounding box of detected objects, and Figure 5-(2)
shows the detected objects mapped on the map.
Assuming that 10 minutes after A takes his dog out,
the dog's owner B notices that the dog is missing, and
checks the information shared by the system on
Google Map to look for the dog. As shown in Figure
6, The system displays the objects detected by A's
edge device as icons on the Google Map. Since only
A has an edge device, the detected object icons are
displayed along A's path of movement. In this
experiment, we used the MS-COCO dataset, which is
capable of recognizing about 80 types of objects, and
about 80 types of icons to be displayed on Google
Map. When a user clicks on the icon, detailed
information including an image is displayed. The
owner of the escaped dog, B, clicks on the dog icon
to confirm whether the image is of his dog or not. The
system updates the dog's location in real time because
A's edge device keeps detecting the dog that is with
him. As a result, the dog's owner B was able to find
the dog by tracking the dog's path. Since the dog and
the edge device are together in this experiment, it is
not surprising that the dog can be found. However, we
believe that if enough people have the edge device,
they will be able to find the dog in the same way if
the dog runs away.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
480

Figure 5: Prototype Application Screen Capture.
Figure 6: the detected object information can be accessed
from a web browser.
3.2.2 Bird Detection and Public Facility
Announcements Detection Experiment
(Sound Detection Experiment)
Using a bird habitat survey as a use case, we set up a
scenario to investigate how many sparrows were in
the neighborhood. YOLO v4 can recognize birds, but
it cannot recognize the species sparrow. We
considered using a model trained on sparrows, but as
shown in Figure 7, sparrows are too small for
smartphone to be processed by image recognition.
Figure 7: Sparrows are too small for smartphone to image
detect.
Therefore, we decided to recognize sparrow singings,
We used the BirdVox learning model (BirdVox,
2023), which can detect 14 types of bird singings
including sparrows. Our system plot a bird icon at the
location where a sparrow singing is detected. First,
we tested using a pre-recorded video of sparrows
singing (pre-recorded sparrow singings, 2023) and
conducted a recognition experiment in a quiet indoor
environment. In this case, YOLO v4 recognized the
sparrows on the screen as birds, and BirdVox also
recognized the singing as sparrows and displayed
their locations as bird icons on GoogleMap (Figure
8). However, our system could hardly recognize
sparrows in an outdoor environment (The recognition
rate was around 2%). As we discussed, the sparrows
were too small for YOLO v4 to recognize and that
singing recognition failed in the outdoor environment
because of the numerous many overlapping sounds
and noises mixed in, such as the sound of wind or
cars.
Figure 8: Bird Detection Experiment result (Indoor).
We also set up a scenario to recognize public
facility announcements and reflect them in the
GoogleMap. We use Google Cloud Speech-to-Text
(Google Speech to Text, 2023.) to catch public
facility announcements. The speech recognition was
also successful when we played a pre-recorded Shin-
yokohama station Shinkansen train announcement
speech (pre-recorded Shinkansen announce, 2023) in
a quiet environment (Figure 9).
Figure 9: Public Announcements Experiment result
(Indoor).
However, our system also could not recognize the
actual Shinkansen station announcements. We also
believe announcement recognition failed in the
outdoor environment because of the numerous noises
A Study of Real World Information Mapping for Information Sharing Using Edge Devices
481

mixed. In particular, in train stations, there are many
overlapping sounds, such as departure melody and
multiple announcements being made at the same
time, as well as mechanical noise from stopped trains,
making environmental sound recognition very
difficult.
4 DISCUSSION, AND FUTURE
WORKS
We have developed a prototype system that can detect
"objects" and "events" in the real world and share the
information using a smartphone as an edge device.
Through experiments, we confirmed that our system
is capable of detecting "objects" using image
recognition and sharing the detected "object"
information.
We need to improve object detection accuracy by
expanding the dataset or refining the classification
algorithm. Our system use YOLO and the MS-
COCO dataset. Unfortunately, YOLO's recognition
accuracy and MS-COCO's classification class were
not sufficient for real-world "object" detection. For
example, a small white warehouse (cleaning supplies
and other items inside) in the park was sometimes
misrecognized as a refrigerator.
As a next step we would like to try refining the
object detection algorithm. For example, Karmouni et
al. and Yamni et al. propose a 3D discrete orthogonal
invariant moments for image classification
(Karmouni et al, 2021)(Yamni et al,2019)(Yamni et
al, 2021). We also would like to try object recognition
that takes into account the location where the object
exists. We believe that we can improve recognition
accuracy from the context of location. For example,
the common knowledge that "there are usually no
refrigerators in parks" is useful for object recognition.
We also need to enhance outdoor sound
recognition through advanced noise reduction or
sound source separation. Sound recognition works
well in a quiet indoor environment, but it currently
does not work well in noisy outdoor environments.
We believe that the reason for this is that the outdoor
sound contains many overlapping sounds and noises.
We believe that noise reduction and sound source
separation must be performed with high accuracy to
ensure stable environmental sound recognition in
outdoor environments. We would like to try noise
reduction by using high-performance directional
microphones or microphone arrays, as well as more
accurate speech recognition or sound source
separation methods in the future.
Our experiments show that multimodal analysis
with image and sound recognition can explain what is
happening in the real world. For example, as shown
in Figure A, we can obtain the information that
"sparrow is singing" and "bird is on the screen". We
will implement a function to explain what is
happening in the real world by inputting this
information into a Large Language Model (LLM)
such as ChatGPT. This would allow, for example, the
automatic generation of an explanation such as "I hear
a sparrow singing from the smartphone" (Figure 10).
Figure 10: LLM what is happening in the real world.
We also have the issue of the GNSS accuracy. We
experimented in a park with no obstacles in the sky,
but the GNSS accuracy was at best about 5 m
horizontally and 3 m vertically, with errors of 30 m or
more in some situations. Therefore, we want to try a
method to estimate self-position by measuring the 3D
geometry of the real world. For example, position
estimation can be performed by matching point cloud
data obtained by LiDAR sensors installed in recent
smartphones, and something similar has already been
implemented in automatic driving. For this purpose,
it is necessary to convert the entire real world into
point cloud data. However, point cloud data in cities
and buildings are available through the PLATEAU
project (Ministry of Land, Infrastructure, Transport
and Tourism Japan, 2023) promoted by Japan's
Ministry of Land, Infrastructure, Transport, and
Tourism, and we would like to consider improving
the accuracy of self-position estimation using this
method in the future.
Our application uses a UI that uploads
information to the cloud server only when the user
taps a detected object. This is because the application
does not implement a mechanism to check whether
the detected object is already registered in the DB,
and relies on a human to make that judgment. In the
next step, we will automate the user interface from
detection to cloud uploading for a smoother user
experience.
In addition, this prototype only recorded the
surrounding sound at the time of object detection, but
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
482
we would like to detect and classify sounds and
register information triggered by sounds in the future.
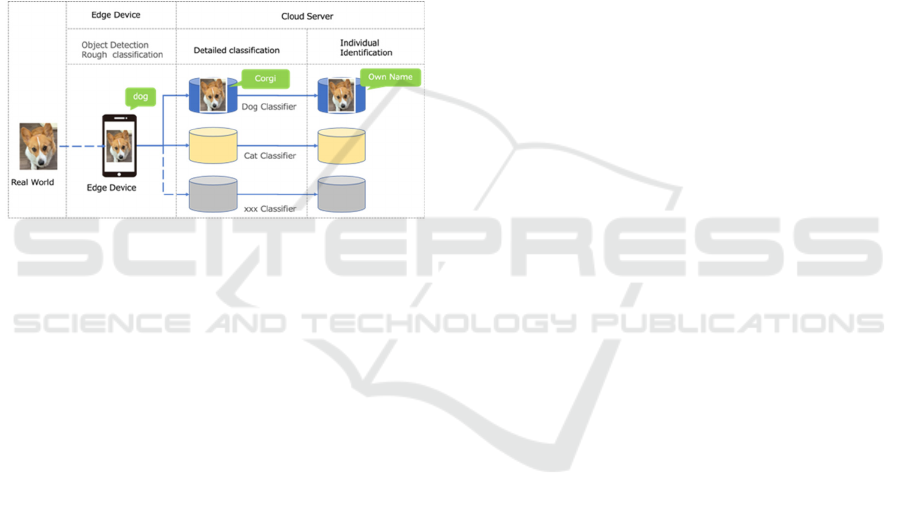
Our final target system configuration is shown in
Figure 11. This system performs real-time object
detection and classification on the edge device side
and transmits the results to the cloud side for further
classification and individual identification. This
allows the implementation of services without
overloading the communication path and the cloud
side. We also believe that by making this architecture
publicly available and allowing each user to connect
to his or her classifier, it will be possible to automate
the creation of so-called "My Maps," mapping objects
of interest to him or her, finally enabling the
construction and real time updating of a digital twin
for the entire world.
Figure 11: Our final target system overview.
ACKNOWLEDGEMENTS
This work was supported in part by a Grant-in-Aid for
Scientific Research (A) Grant Number 20H00608.
REFERENCES
Geospatial Information Authority of Japan. 2022.
Fundamental Geospatial Data. Retrieved Jan 1, 2023
from https://www.gsi.go.jp/kiban/faq.html
Sendai Keizai. 2012. Jojo Exhibition in S-City Moriou-
Machi to open in Sendai. Retrieved Jan 1, 2023 from
https://sendai.keizai.biz/headline/1219/
Takenori Hara and Hideo Saito. 2023. Real-Time Safe
Route Finding and Visualization Using Shared Edge
Devices. In: CEUR Workshop Proceedings. 2022; Vol.
3297.
Cabinet Office of Japan. 2022. Society5.0. Retrieved Jan 1,
2023, from https://www8.cao.go.jp/cstp/society5_0/
Joseph Redmon, Santosh Divvala, Ross Girshick, and Ali
Farhadi. 2016. You Only Look Once: Unified, Real-
Time Object Detection. In Proceedings of 2016 IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR), Pages: 779-788
Karol. J. Piczak, "Environmental sound classification with
convolutional neural networks," 2015 IEEE 25th
International Workshop on Machine Learning for
Signal Processing (MLSP), Boston, MA, USA, 2015,
pp. 1-6,
Yuji Tokozume, Tatsuya Harada, "Learning environmental
sounds with end-to-end convolutional neural network,"
2017 IEEE International Conference on Acoustics,
Speech and Signal Processing (ICASSP), New Orleans,
LA, USA, 2017, pp. 2721-2725
Qiuqiang Kong, Yin Cao, Turab Iqbal, Yuxuan Wang,
Wenwu Wang, Mark D. Plumbley, "PANNs: Large-
Scale Pretrained Audio Neural Networks for Audio
Pattern Recognition," in IEEE/ACM Transactions on
Audio, Speech, and Language Processing, vol. 28, pp.
2880-2894, 2020.
Ling Chen and Abhishek Roy. 2009. Event detection from
Flickr data through wavelet-based spatial analysis. In
Proceedings of the 18th ACM conference on
Information and knowledge management (CIKM '09).
Association for Computing Machinery, New York, NY,
USA, 523–532.
Ryong Lee and Kazutoshi Sumiya. 2010. Measuring
geographical regularities of crowd behaviors for
Twitter-based geo-social event detection. In
Proceedings of the 2nd ACM SIGSPATIAL
International Workshop on Location Based Social
Networks (LBSN '10). Association for Computing
Machinery, New York, NY, USA, 1–10.
Takeshi Sakaki, Makoto Okazaki and Yutaka Matsuo.
2010. Earthquake shakes Twitter users: real-time event
detection by social sensors. In Proceedings of the 19th
international conference on World wide web (WWW
'10). Association for Computing Machinery, New
York, NY, USA, 851–860.
Maximilian Walther and Michael Kaisser. 2013. Geo-
spatial event detection in the Twitter stream. In
Proceedings of the 35th European Conference on
Advances in Information Retrieval (ECIR'13).
Springer-Verlag, Berlin, Heidelberg, 356–367.
Jaewoo Kim, Meeyoung Cha, and Thomas Sandholm.
2014. SocRoutes: safe routes based on tweet
sentiments. In Proceedings of the 23rd International
Conference on World Wide Web (WWW '14
Companion). Association for Computing Machinery,
New York, NY, USA, 179–182.
Mobileye. 2023. Mobileye | Driver Assist and Autonomous
Driving Technologies Retrieved from https://www.
mobileye.com/our-technology/rem/
FixMyStreet Japan. 2023 FixMyStreet Retrieved from
https://www.fixmystreet.jp/
Yahoo Weather Forecast. 2023. Yahoo Weather Forecast
Retrieved from https://weather.yahoo.co.jp/weather/
Yahoo Disaster Prevention. 2023. Yahoo Disaster
Prevention App Retrieved from https://emg.
yahoo.co.jp/, February 2022
Apple. 2023. Find" to find friends/share location Retrieved
from https://support.apple.com/ja-jp/HT210514
LINE HERE. 2023. LINE HERE Retrieved from
https://linecorp.com/
A Study of Real World Information Mapping for Information Sharing Using Edge Devices
483

Life360. 2023. Life360 Retrieved from https://
www.life360.com/intl/
Glympse. 2023. Retrieved from https://www.
wfrontier.jp/glympse/
Sukru Yaren Gelbal, Mustafa Ridvan Cantas, Bilin Aksun-
Guvenc, and Levent Guvenc. 2021. Pedestrian Path
Modification Mobile Tool for COVID-19 Social
Distancing for Use in Multi-Modal Trip Navigation.
arXiv:2105.07951. Retrieved from https://arxiv.
org/abs/2105.07951v2
Maria Fazio, Alina Buzachis, Antonino Galletta, Antonio
Celesti and Massimo Villari. 2020. A proximity-based
indoor navigation system tackling the COVID-19 social
distancing measures. In IEEE Symposium on
Computers and Communications, ISCC 2020, Rennes,
France, July 7-10, 2020. pages 1-6, IEEE, 2020.
Yizhou Zhao, Yuetian Xie, and Shohreh Ahvar. 2019. On
Integration of Any Factor with Distance for Navigation:
Walk Safely and Fast Enough. In Proceedings of the
IEEE 23rd International Enterprise Distributed Object
Computing Workshop (EDOCW), Paris, France, 2019
pp. 92-95.
BirdVox, 2023. Retrieved from https://wp.nyu.edu/birdvox/
pre-recorded sparrow singings, 2023. Retrieved from
https://www.youtube.com/watch?v=uJs8Au-pWCA
Google Speech to Text, 2023. Retrieved from
https://cloud.google.com/speech-to-text
pre-recorded Shinkansen announce, 2023. Retrieved from
https://www.youtube.com/watch?v=lPd1SR3ky30
Karmouni, H., Yamni, M., El Ogri, O. et al. Fast
Computation of 3D Discrete Invariant Moments Based
on 3D Cuboid for 3D Image Classification. Circuits
Syst Signal Process 40, 3782–3812 (2021).
M. Yamni, A. Daoui, O. El ogri, H. Karmouni, M.
Sayyouri, H. Qjidaa, Influence of Krawtchouk and
Charlier moment’s parameters on image reconstruction
and classification, Procedia Computer Science, Volume
148, 2019, Pages 418-427,
Yamni, M., Daoui, A., El ogri, O. et al. Fast and Accurate
Computation of 3D Charlier Moment Invariants for 3D
Image Classification. Circuits Syst Signal Process 40,
6193–6223 (2021).
Ministry of Land, Infrastructure, Transport and Tourism
Japan,2023. Project PLATEAU Retrieved from
https://www.mlit.go.jp/plateau/.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
484
