
Two-Stage Adaptable Robust Optimization for Glass Production
Anton Medvedev
2 a
, Safia Kedad-Sidhoum
1 b
and Fr
´
ed
´
eric Meunier
3 c
1
CEDRIC - CNAM, France
2
CEDRIC - CNAM & SGR, France
3
CERMICS -
´
Ecole des Ponts ParisTech, France
fi
Keywords:
Robust Optimization, Finite Adaptability, Two-Stage Optimization, Glass Production.
Abstract:
In the glass industry, visual and thermal properties of the glass sheets are obtained via the deposit of thin layers
of different materials. A standard way to perform this step is the use of a “magnetron,” in which the materials
are transferred from cathodes to the sheets using a magnetic field. Since the cathodes are very expensive,
activation and replacement decisions have to be carefully decided to keep the cost of the wasted materials low.
The production is organized in campaigns and the activation and replacement decisions of the cathodes have
to be taken before each campaign. Yet, the exact orders to process during a campaign are only revealed after
the decisions have been taken. We focus here on the case of two campaigns, which we model as a two-stage
robust optimization problem. We propose a method based on the finite adaptability approach of Bertsimas and
Caramanis (2010) combined with the branch-and-bound of Subramanyam et al. (2020). Experiments on real
instances show that our method leads to clear diminutions of the cost of wasted material in the worst cases,
and—even more interesting—allow to find solutions for cases that are unfeasible with the heuristic used by
the practitioners.
1 INTRODUCTION
Within the glass industry, the visual and thermal prop-
erties of glass sheets are achieved by applying thin
layers of different materials. A common method
for accomplishing this is the utilization of a “ mag-
netron,” which employs a magnetic field to transfer
materials from cathodes to the glass sheets. As cath-
odes are a costly component, it is crucial to care-
fully determine how to refill, to replace, and to ac-
tivate them in order to minimize the wasted material
costs. Due to possible changes of the initial produc-
tion plan, the consumption of cathodes is somewhat
uncertain, making the task of finding the best refill, re-
placement, and activation decisions highly challeng-
ing. In this procedure, production is structured into
campaigns that include numerous orders. During the
intervals between these campaigns, maintenance for
the magnetron is carried out and decisions regarding
refilling, replacing, and activating the equipment have
to be taken.
a
https://orcid.org/0009-0003-7726-7168
b
https://orcid.org/0000-0002-2184-2261
c
https://orcid.org/0000-0002-5331-2863
This magnetron problem is encountered by Saint-
Gobain, a French multinational company producing
a variety of construction high-performance materials
such as coated glass. The magnetron has already been
the subject of an academic work, by Gicquel et al.
(2010). But the focus of this latter paper is different:
while we assume in the present work that the location
of the cathodes is fixed, the cited paper addresses the
problem of finding the optimal locations of the cath-
odes in the magnetron.
Uncertainty of the parameters may have crucial
impact on the feasibility and optimality of an opti-
mization problem (Ben-Tal and Nemirovski, 2000).
The two main viewpoints on uncertainty in optimiza-
tion are the stochastic viewpoint and the robust one.
The assumptions and goals of these two viewpoints
are different. Stochastic optimization relies on the
probability distribution of the uncertain parameters
and in general aims at optimizing the expectation
of an objective function. Ruszczy
´
nski and Shapiro
(2003) provide details on stochastic optimization.
Feasibility of all uncertainty realizations is not neces-
sary required. On the other hand, robust optimization
relies on a set-based uncertainty model, the solutions
are required to be feasible for all uncertainty realiza-
Medvedev, A., Kedad-Sidhoum, S. and Meunier, F.
Two-Stage Adaptable Robust Optimization for Glass Production.
DOI: 10.5220/0012316900003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 229-235
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
229

tions, and in general the aim is to optimize the worst
case. Gabrel et al. (2014) provide a comprehensive
review of developments of robust optimization and its
application areas.
In this paper, we address the uncertainty of the
magnetron problem from the robust viewpoint. Ac-
cording to the engineers operating the magnetron, fea-
sibility must be ensured in all cases. Indeed, a lack
of material on a cathode might lead to a very costly
interruption of the campaign, and, moreover, expos-
ing such a cathode with the magnetic field can even
lead to serious damages to the magnetron itself. This
already brings the problem in the realm of robust op-
timization. A second reason comes from the main ob-
jective function behind the decisions of the engineers:
not to have to perform too many tasks on the cathodes
between the campaigns. Once a reasonable number of
tasks ensuring feasibility has been identified, the cost
of wasted material has to be kept acceptable, even in
the worst scenario.
We focus on the two-campaign case, which we
model as a “two-stage” robust optimization problem.
In such a problem, there is a first series of decisions
to be taken (the “here-and-now” decisions), then un-
certainty is revealed, and then there is a second series
of decisions to be taken (the “wait-and-see” recourse
decisions). It is worth noting that even though in
the magnetron problem the uncertain data is revealed
in two steps—with recourse decisions between these
two steps—we manage to get a two-stage problem,
with only one step of uncertainty to take into account.
We propose then an efficient method to solve this
problem. We follow the finite adaptability approach
by Bertsimas and Caramanis (2010), combined with
the exact branch-and-bound by Subramanyam et al.
(2020). Experiments show that our method outper-
forms the standard one by two aspects: the cost of
wasted material is always smaller in our solutions
than in the ones computed with the heuristic used by
the practitioners; we show that there exists situations
where this latter method concludes to unfeasibility,
while our method does find solutions.
In Section 2, a formal description of the prob-
lem is given. This description is done in two steps:
first, the deterministic version, where all parameters
are known when the decisions have to be taken: sec-
ond, the robust version, where the uncertain parame-
ters are progressively revealed, and where some de-
cisions depend on the uncertainty. This problem is
then modeled as a mathematical program in Section 3.
Section 4 presents the method proposed to solve the
problem after a brief introduction to finite adaptability
and to the branch-and-bound approach. In Section 5,
numerical results are provided and commented, prov-
ing the efficiency of the method.
2 PROBLEM FORMULATION
In this section we present the formulation of the mag-
netron problem in its two versions, deterministic and
robust.
2.1 Deterministic Version
On the magnetron, there are n possible locations for
the cathodes. A campaign C is a multiset of orders.
An order o corresponds to a triple (G
o
, p
o
,t
o
), with
G
o
⊆ [n] and p
o
,t
o
∈ R
+
. The number p
o
is the total
power that must be distributed among the cathodes at
locations in G
o
. The number t
o
is the processing time
of the order o.
Moreover, the cathodes’ locations are partitioned
into m subsets denoted by A
1
,. ..,A
m
. Each of these
subsets corresponds to locations assigned to a certain
material.
As we focus on a two-campaign setting, an in-
stance of the problem is a pair of campaigns C
1
,C
2
.
The orders in C
1
are processed before those in C
2
.
The following decisions have to be taken for each
campaign C
c
:
• Refill: choose a subset R
c
⊆ [n] of locations for
which the cathodes will be refilled at the full level
just before C
c
. The full level at location j is de-
noted by Q
j
.
• Replacement: choose a permutation σ
c
of [n] such
that σ
c
(A
i
) = A
i
for all i ∈ [m]: for j ∈ A
i
, the cath-
ode at j will be placed at σ
c
( j) ∈ A
i
just before the
refills R
c
.
• Activation: distribute the power p
o
of order o ∈ C
c
among the cathodes at locations in G
o
, as p
o
=
∑
j∈G
o
p
c
o, j
.
The number of cathode’s refills before C
c
cannot ex-
ceed a given limit r
c
. The number of replacements
between cathodes before C
c
cannot exceed a given
threshold s
c
. Given o ∈ C
c
, the quantities p
c
o, j
of an
activation decision p
o
=
∑
j∈G
o
p
c
o, j
have to belong to
{0} ∪ [p
j
, p
j
], where p
j
and p
j
are parameters. In
words, this last constraint means that when a cathode
is activated, the power of the activation has to lie in a
given interval.
For the cathode located at j, we denote by q
1
j
the
initial quantity of material, by q
2
j
the quantity of ma-
terial just after C
1
, and by q
3
j
the quantity of material
just after C
2
. While q
1
j
is a parameter, the quantities
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
230

q
2
j
and q
3
j
are auxiliary variables. For c ∈ {1,2}, the
quantity q
c+1
j
can be expressed as
q
c+1
j
= −
∑
o∈C
c
t
o
p
c
o, j
+
(
Q
j
if j ∈ R
c
.
q
c
σ
c
( j)
otherwise.
The first term in the expression of q
c+1
j
stands for the
material consumption implied by campaign C
c
and
activation decisions on the cathode at j. For c ∈ {2, 3}
the quantity q
c
j
has to be non-negative: q
c
j
⩾ 0.
The only cost implied by the refill, the replace-
ment, and the activation decisions is the materials
waste cost. For a cathode at location j just before
C
c
, the latter is c
j
q
c
j
, where c
j
is the unit cost of the
material located at j. In words, this means that when
a cathode at j is refilled, all the current quantity on
it is lost. With the notation F(q
c
,R
c
)
:
=
∑
j∈R
c
c
j
q
c
j
,
the total resulting cost can be written as F(q
1
,R
1
) +
F(q
2
,R
2
).
2.2 Robust Version
We present now the robust version to handle the un-
certain parameters.
For C
c
there is a polyhedral uncertainty set Ω
c
.
The only parameters that depend on the uncertainty
are the production times t
o
, which we write from now
on t
o
(ω
c
), where ω
c
∈ Ω
c
if o ∈ C
c
. We assume that
this dependence is affine.
The uncertainty realizations ω
1
∈ Ω
1
and ω
2
∈ Ω
2
are revealed in two steps: ω
1
is revealed after C
1
has
been processed, and ω
2
is revealed after C
2
has been
processed. This implies that the decisions taken be-
tween C
1
and C
2
may depend on ω
1
. In particular,
the refill decisions of C
2
becomes R
2
(ω
1
). No deci-
sions are taken after C
2
has been processed. Yet some
auxiliary variables depend on ω
2
.
The last changes the robust version implies with
respect to the deterministic version are the expression
of q
2
j
and q
3
j
, the non-negativity of the available quan-
tity of material on the cathodes, and the expression of
the objective function.
For all j ∈ [n] the quantity q
2
j
becomes
q
2
j
(ω
1
) = −
∑
o∈C
1
t
o
(ω
1
)p
c
o, j
+
(
Q
j
if j ∈ R
1
,
q
1
σ
1
( j)
otherwise,
and the quantity q
3
j
becomes
q
3
j
(ω
1
,ω
2
) = −
∑
o∈C
2
t
o
(ω
2
)p
c
o, j
(ω
1
)
+
(
Q
j
if j ∈ R
2
(ω
1
),
q
2
σ
2
(ω
1
)( j)
(ω
1
) otherwise,
for all ω
1
∈ Ω
1
,ω
2
∈ Ω
2
.
The non-negativity constraints translate into
q
2
j
(ω
1
) ⩾ 0 and q
3
j
(ω
1
,ω
2
) ⩾ 0 for all ω
1
∈ Ω
1
,ω
2
∈
Ω
2
.
The objective function becomes F(q
1
,R
1
) +
max
ω
1
∈Ω
1
F(q
2
(ω
1
),R
2
(ω
1
)). Robustness refers to
the requirement to be feasible for every realization
of the uncertainty and to be minimal for the maximal
possible cost.
3 MODELING
In this section we model the magnetron problem in its
robust version as a mathematical program.
The constraints related to the number of refills are:
n
∑
j=1
r
1
j
⩽ r
1
n
∑
j=1
r
2
j
(ω
1
) ⩽ r
2
∀ω
1
∈ Ω
1
(1)
The variable r
1
j
is binary and takes the value 1 if
the cathode located at j is refilled, i.e., if j ∈ R
1
. Sim-
ilarly, the variable r
2
j
(ω
1
) is binary and takes the value
1 if the cathode located at j is refilled in the realiza-
tion ω
1
, i.e., if j ∈ R
2
(ω
1
).
The constraints related to the number of replace-
ments are:
n
∑
j=1
n
∑
k=1
k̸= j
y
1
j,k
⩽ s
1
n
∑
k=1
j̸=k
y
1
k, j
=
n
∑
k=1
j̸=k
y
1
j,k
∀ j ∈ [n]
n
∑
k=1
y
1
j,k
= 1 ∀ j ∈ [n]
n
∑
j=1
n
∑
k=1
k̸= j
y
2
j,k
(ω
1
) ⩽ s
2
∀ω
1
∈ Ω
1
n
∑
k=1
j̸=k
y
2
k, j
(ω
1
) =
n
∑
k=1
j̸=k
y
2
j,k
(ω
1
) ∀ j ∈ [n], ω
1
∈ Ω
1
n
∑
k=1
y
2
j,k
(ω
1
) = 1 ∀ j ∈ [n], ω
1
∈ Ω
1
.
(2)
The variable y
1
j,k
is binary and takes the value 1
if the cathode at j is replaced by the cathode at k,
i.e., if σ
1
( j) = k. Similarly, the variable y
2
j,k
(ω
1
) is
binary and takes the value 1 if the cathode at j is re-
placed by the cathode at k in the realization ω
1
, i.e.,
Two-Stage Adaptable Robust Optimization for Glass Production
231

if σ
2
(ω
1
)( j) = k. Constraints (2) models the permu-
tation in a standard way, as done for instance for the
directed TSP; see, e.g., Korte et al. (2011).
The constraints on the activation decisions are:
∑
j∈G
o
p
1
o, j
= p
o
∀o ∈ C
1
∑
j∈G
o
p
2
o, j
(ω
1
) = p
o
∀o ∈ C
2
, ω
1
∈ Ω
1
.
(3)
The constraints on the quantities of material on
cathodes at any location before both campaigns are:
q
2
j
(ω
1
) = −
∑
o∈C
1
t
o
(ω
1
)p
1
o, j
+ r
1
j
Q
j
+(1 − r
1
j
)
n
∑
k=1
y
1
j,k
q
1
k
∀ j ∈ [n] ,ω
1
∈ Ω
1
q
3
j
(ω
1
,ω
2
) = −
∑
o∈C
2
t
o
(ω
2
)p
2
o, j
(ω
1
) + r
2
j
(ω
1
)Q
j
+(1 − r
2
j
(ω
1
))
n
∑
k=1
y
2
j,k
(ω
1
)q
2
k
(ω
1
)
∀ j ∈ [n] ,ω
1
∈ Ω
1
,ω
2
∈ Ω
2
(4)
The robust magnetron problem is formulated as
follows:
min
n
∑
j=1
c
j
r
1
j
q
1
j
+ max
ω
1
∈Ω
1
n
∑
j=1
c
j
r
2
j
(ω
1
)q
2
j
(ω
1
)
s.t. (1), (2), (3), (4)
y
1
j
,r
1
j
∈ {0,1} ∀ j ∈ [n]
y
2
j
(ω
1
),r
2
j
(ω
1
) ∈ {0,1} ∀ j ∈ [n], ω
1
∈ Ω
1
p
1
o, j
∈ {0} ∪ [p
j
, p
j
] ∀o ∈ C
1
, j ∈ [n]
p
2
o, j
(ω
1
) ∈ {0} ∪ [p
j
, p
j
]
∀o ∈ C
2
, j ∈ [n],ω
1
∈ Ω
1
q
2
j
(ω
1
) ∈ [0,Q
j
] ∀ j ∈ [n], ω
1
∈ Ω
1
q
3
j
(ω
1
,ω
2
) ∈ [0,Q
j
]
∀ j ∈ [n], ω
1
∈ Ω
1
,ω
2
∈ Ω
2
(P)
The problem (P) has non-linear constraints. We
are able to linearize all of these constraints and
write (P) in the following form without loss of gen-
erality:
min
˜x, ˜y(·)
˜c
⊤
˜x + max
ω
1
∈Ω
1
˜
d
⊤
˜y(ω
1
)
s.t.
˜
A(ω
1
,ω
2
) ˜x +
˜
B(ω
1
,ω
2
) ˜y(ω
1
) ⩽
˜
b
∀ω
1
∈ Ω
1
,ω
2
∈ Ω
2
(5)
with
˜
A and
˜
B two matrices affinely depending on
(ω
1
,ω
2
) ∈ Ω
1
× Ω
2
, and
˜
b, ˜c, and
˜
d are determinis-
tic vectors. The variables are ˜x and ˜y(·): the variable
˜x is the “here-and-now” variable, whose value has to
be determined without knowing the exact ω
1
∈ Ω
1
that will be selected, contrary to ˜y(·)—the “wait-and-
see” recourse variable—whose value can arbitrarily
depend on ω
1
.
The problem (5) does not fit in the standard form
of two-stage robust optimization problems because of
the presence of a second uncertainty ω
2
, which is re-
vealed after all decisions have been taken. We use
a standard duality technique of the robust optimiza-
tion (Gorissen et al., 2015), which allows to transform
the for all quantifier for ω
2
∈ Ω
2
into an exists quan-
tifier. The obtained problem form is the following:
min
x,y(·)
c
⊤
x + max
ω∈Ω
d
⊤
y(ω)
s.t. A(ω)x + B(ω)y(ω) ⩽ b ∀ω ∈ Ω
(6)
with A and B two matrices affinely depending on ω ∈
Ω, and b, c, and d are deterministic vectors. Note that
in (6) the indices for uncertainty realization and for
uncertainty set are dropped, as there is only one uncer-
tainty set. The variables are x and y(·): the variable x
is the “here-and-now” variable, whose value has to be
determined without knowing the exact ω ∈ Ω that will
be selected, contrary to y(·)—the “wait-and-see” re-
course variable—whose value can arbitrarily depend
on ω. The problem (6) is a complete adaptability ver-
sion of a two-stage robust optimization problem, as
the recourse is an arbitrary function of uncertainty.
4 METHOD
Solving exactly problem (6) is referred as complete
adaptability, but this is in general considered as not
tractable since it implies in particular computing an
optimal recourse function y(·) that may be arbitrar-
ily complicated. Bertsimas and Caramanis (2010)
introduced the notion of finite adaptability (or k-
adaptability). This approach bridges the gap between
complete adaptability and a “myopic” approach—the
static variant—taking a fixed recourse decision inde-
pendently of the uncertainty. We address the mag-
netron problem via finite adaptability, and rewrite ac-
cordingly the magnetron problem as
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
232

min
Ω
1
∪···∪Ω
k
x,y
1
,...,y
k
c
⊤
x + max
i∈[k]
d
⊤
y
i
s.t. A(ω)x + B(ω)y
i
⩽ b ∀i ∈ [k] ∀ω ∈ Ω
i
.
(P
k
)
The idea behind the k-adaptability is to split the
uncertainty set Ω into k parts and to assign to each
part a constant recourse decision. The advantage of
such a method compared to the myopic one is that it
allows to separate extreme scenarios and cover them
with different recourse decisions. Multiple heuristics
appeared in the last decade, allowing to solve (P
k
),
such as Bertsimas and Dunning (2016) or Postek and
Hertog (2016). Subramanyam et al. (2020) proposed
a branch-and-bound method solving (P
k
) efficiently,
with proven lower and upper bounds. It is this algo-
rithm which we use to solve the problem.
This branch-and-bound takes as a parameter k, the
number of parts in which the uncertainty set will be
split. Each node of the branch-and-bound tree cor-
responds to a collection of k pairwise disjoint subsets
Ω
′
1
,. ..,Ω
′
k
⊆ Ω (a “partial partition”). Branching cor-
responds to adding an element ω from Ω that is not
yet covered by the Ω
′
i
, to each of the Ω
′
i
. This way, k
branches stems from each node that is not a leaf. A
“separation” subroutine tests whether an optimal so-
lution to the partial partition is also valid for a full
partition completing it. If this is the case, then we
have reached a leaf. If not, the subroutine has actu-
ally found an ω to be added to the Ω
′
i
.
5 NUMERICAL EXPERIMENTS
Before describing briefly the instances and the results,
we explain how the uncertainty is modeled in the ex-
periments. We claim that this modeling is quite accu-
rate.
5.1 Modeling Uncertainty
The only parameters that depend on the uncertainty
are the production times, which we assume to be of
the following form for campaign C
c
. Given ω
c
∈ Ω
c
,
we have t
o
(ω
c
) =
ˆ
t
o
(1+ pω
c
o
), where p is a coefficient
in [0,1] and
ˆ
t
o
is a coefficient in R depending on the
order o. The uncertainty set Ω
c
is defined as
Ω
c
:
=
(
(ω
c
o
)
o∈C
c
: ω
c
o
∈ [−1,1] and
∑
o∈C
c
ˆ
t
o
ω
c
o
= 0
)
.
This is the most elementary way to model the uncer-
tainty so that
• the production times of every order o can take
any value in an interval centered at some value
ˆ
t
o
which corresponds to the predicted value of t
o
.
• the total duration of a campaign is fixed (does not
depend on the uncertainty).
5.2 Instances and Setting
To assess the performance of the method proposed in
Section 4, a real dataset corresponding to seven cam-
paigns has been used to derive three two-campaign in-
stances of the magnetron problem. The dataset corre-
sponds to a magnetron of thirty cathodes of ten differ-
ent materials. Each instance is of size n = 30, m = 10
with |C
1
| ∈ [10,12] and |C
2
| ∈ [10,12].
For these experiments, we have chosen to forbid
replacements (i.e., the parameters s
1
and s
2
are set to
zero). We have r
1
= 8 and r
2
= 14 for data1 and data2.
For data3, we have r
1
= 14 and r
2
= 8.
Parameter c
j
ranges from 200 to 1000 for j =
1,. ..,n, j /∈ {9,10,24}, c
9
= c
24
= 35 and c
10
= 45.
Regarding uncertainty, the experiments have been
conducted with p ∈ {0.1,0.2,0.5}.
We used the open-source implementation of the
algorithm of Subramanyam et al. (2020), based on the
C callable library of CPLEX. All experiments were
conducted on 32 cores of an Intel Xeon 2.30GHz
computer, with a gap limit of 0.1%, a time limit of
3600 seconds and a memory limit of 10Gb.
5.3 Results
The three available instances have been solved us-
ing the branch-and-bound algorithm of Subramanyam
et al. (2020) for all the values of k ∈ [10]. The solu-
tion obtained for k is used as a warm-start for k + 1.
Table 1 gives the numerical results for problem (P
k
).
The first column refers to the dataset. The next two
columns give the parameters p and k respectively.
Columns four and five provide the value of the ob-
jective function and the CPU time in seconds. The
second-to-last column gives the average relative gap
between the global lower bound for (P
k
) (for the given
k) and the achieved objective value (either optimal
or provided by the incumbent branch-and-bound tree
when the time limit is reached). The last column
of the table displays the relative gain brought by k-
adaptability for the associated value of k, compared
to the 1-adaptability.
5.4 Comments
For the static version a nearly-optimal solution is
found most of the time very quickly, but in some set-
tings as for the instance data1 with p = 0.5, it is more
time consuming. For k > 1 the gap significantly grows
in most of cases, but for instances data1 and data2
Two-Stage Adaptable Robust Optimization for Glass Production
233
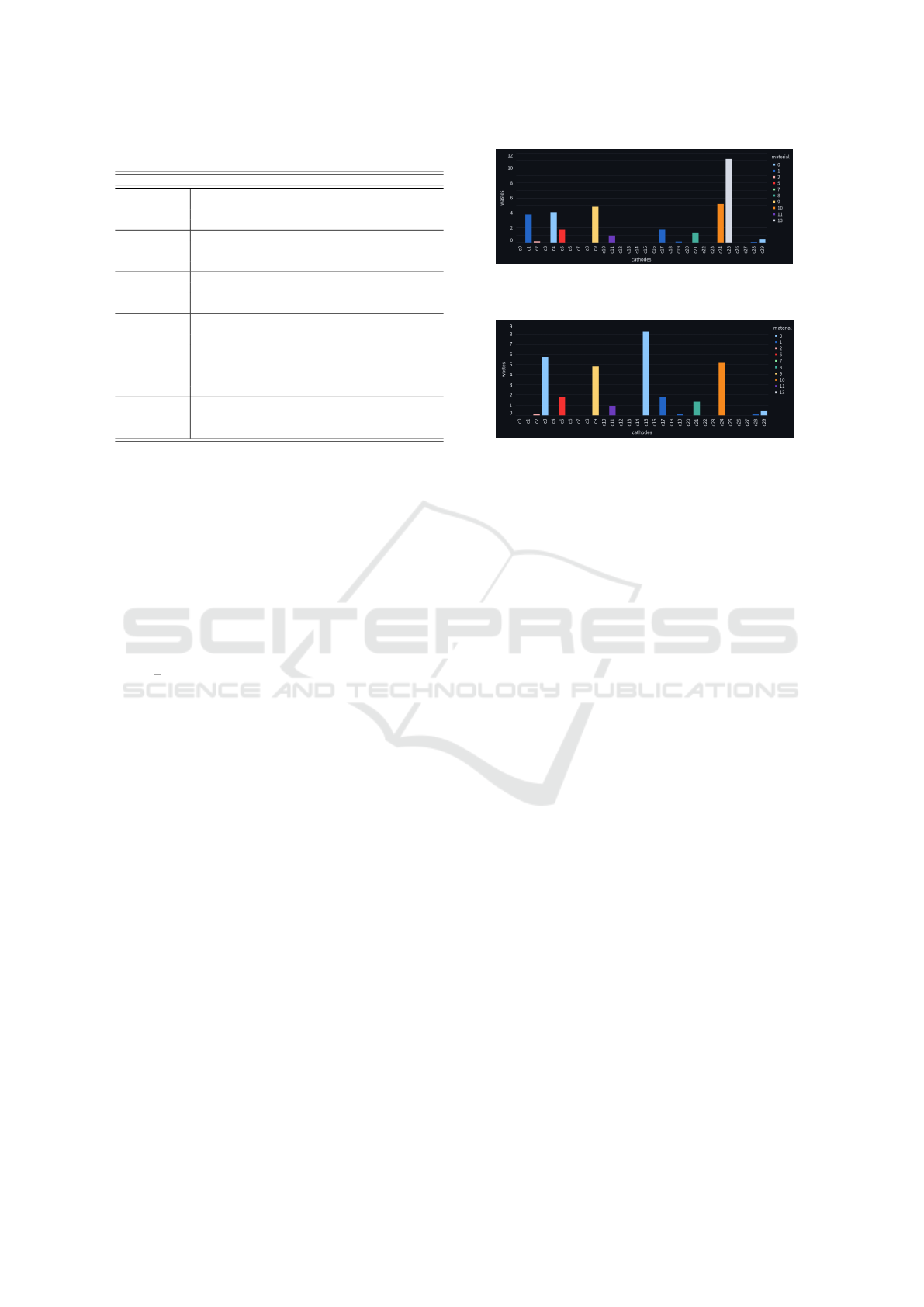
Table 1: Numerical results for problem (P
k
).
dataset p k value time (s) gap (%) gain vs k = 1 (%)
data1 0.20 1 10,514.60 144.12 0.10 0.00
data1 0.20 2 10,507.20 3,606.84 56.48 0.07
data1 0.20 5 10,498.10 3,606.50 56.45 0.16
data1 0.20 10 10,351.30 359.64 0.09 1.55
data2 0.20 1 4,983.26 1.93 0.10 0.00
data2 0.20 2 4,865.31 3,603.19 7.45 2.37
data2 0.20 5 4,865.31 3,604.79 7.30 2.37
data2 0.20 10 4,865.31 1,126.59 0.10 2.37
data3 0.20 1 8,215.78 1.82 0.04 0.00
data3 0.20 2 8,190.85 3,607.50 27.09 0.30
data3 0.20 5 7,634.37 3,603.38 26.79 7.08
data3 0.20 10 7,634.37 3,605.04 26.79 7.08
data1 0.50 1 25,275.90 957.35 0.10 0.00
data1 0.50 2 22,403.90 3,602.72 39.31 11.36
data1 0.50 5 22,282.40 3,605.31 49.60 11.84
data1 0.50 10 22,282.40 2,252.41 50.33 11.84
data2 0.50 1 5,433.87 2.71 0.00 0.00
data2 0.50 2 5,433.87 3,600.27 6.95 0.00
data2 0.50 5 5,433.87 3,605.70 7.66 0.00
data2 0.50 10 5,433.87 3,613.37 21.93 0.00
data3 0.50 1 11,700.30 1.36 0.04 0.00
data3 0.50 2 11,680.10 3,600.62 7.13 0.17
data3 0.50 5 11,627.40 3,602.26 13.05 0.62
data3 0.50 10 11,627.40 3,602.55 13.05 0.62
with p = 0.2 and k = 10 a nearly optimal solution is
also found with an optimality gap close to zero.
The k-adaptability framework has a great impact
on the quality of the obtained solutions. For some
instances the gap for k = 1 is smaller than the relative
gain brought by larger values of k. This means that it
is guaranteed that increasing k in these cases leads to
better decisions.
We do not know the exact description of the
heuristic used by the practitioners but since it uses a
fixed recourse, it is dominated by our results for k = 1.
Complementary experiments have shown that
when r
1
= 12, data1 with p = 0.5 has no feasible
solution for k = 1, while there are feasible solutions
for k > 1. It means that for some instances the k-
adaptability may not only bring better solutions in
terms of the objective function, but also and more im-
portantly may bring feasibility.
6 CONCLUDING REMARKS
We formulated and modeled an industrial problem in
the framework of finite adaptability and solved it with
a branch-and-bound algorithm developed by Subra-
manyam et al. (2020). The experimental results show
that for some instances finite adaptability brings more
optimal solutions and even feasibility.
Two research directions can be further explored.
The first one aims at comparing the long term effects
of the finite adaptability and the static method. This
study is interesting because a good short-term opti-
mization may have bad impact on the long-term re-
sults. The second one seeks to adapt the problem for-
mulation in the case of a heavy production planning.
In that case the objective would be to minimize the
number of refills, leading to the maintenance duration
Figure 1: Wasted quantities of material (mm) before the first
campaign for the static solution for data1 with p = 0.50.
Figure 2: Wasted quantities of material (mm) before the
first campaign for the 10-adaptable solution for data1 with
p = 0.50.
minimization.
ACKNOWLEDGEMENTS
This research was supported by Saint Gobain Re-
search Paris as part of a CIFRE collaboration with the
CEDRIC laboratory of the CNAM Paris. We thank
our colleagues Amaury Civrac and S
´
ebastien De-
schamps from who provided insight and expertise that
greatly assisted the research. We also thank Bastien
Rolland and his supervisor Tristan Barbe, who started
working of this subject as part of an internship.
REFERENCES
Ben-Tal, A. and Nemirovski, A. (2000). Robust solutions of
linear programming problems contaminated with un-
certain data. Mathematical programming, 88(3):411–
424.
Bertsimas, D. and Caramanis, C. (2010). Finite adaptability
in multistage linear optimization. IEEE Transactions
on Automatic Control, 55(12):2751–2766.
Bertsimas, D. and Dunning, I. (2016). Multistage robust
mixed-integer optimization with adaptive partitions.
Operations Research, 64(4):980–998.
Gabrel, V., Murat, C., and Thiele, A. (2014). Recent ad-
vances in robust optimization: An overview. Eu-
ropean journal of operational research, 235(3):471–
483.
Gicquel, C., Mi
´
egeville, N., Minoux, M., and Dallery, Y.
(2010). Optimizing glass coating lines: Mip model
and valid inequalities. European Journal of Opera-
tional Research, 202(3):747–755.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
234

Gorissen, B. L., Yanıko
˘
glu,
˙
I., and den Hertog, D. (2015).
A practical guide to robust optimization. Omega,
53:124–137.
Korte, B. H., Vygen, J., Korte, B., and Vygen, J. (2011).
Combinatorial optimization, volume 1. Springer.
Postek, K. and Hertog, D. d. (2016). Multistage adjustable
robust mixed-integer optimization via iterative split-
ting of the uncertainty set. INFORMS Journal on
Computing, 28(3):553–574.
Ruszczy
´
nski, A. and Shapiro, A. (2003). Stochastic pro-
gramming models. Handbooks in operations research
and management science, 10:1–64.
Subramanyam, A., Gounaris, C. E., and Wiesemann, W.
(2020). K-adaptability in two-stage mixed-integer ro-
bust optimization. Mathematical Programming Com-
putation, 12(2):193–224.
Two-Stage Adaptable Robust Optimization for Glass Production
235
