
Real-Time Desertscapes Simulation with CUDA
Alexander Maximilian Nilles
a
, Lars G
¨
unther and Stefan M
¨
uller
Institute for Computational Visualistics, University of Koblenz, Universit
¨
atsstr. 1, Koblenz, Germany
Keywords:
Procedural Modeling, Desert, Sand-Dunes, Simulation, Aeolian Erosion, Real-Time, GPU, CUDA.
Abstract:
We propose a new GPU-based method capable of simulating dune formation, propagation and aeolian sand
transport, based on the Desertscape Simulation model. Our method improves upon the original as well as an
existing real-time GPU implementation by introducing bilinear interpolation and removing randomness, which
leads to a more robust and noise-free method. We implement our method with CUDA and use atomic adds on
floats to remove a previous limitation that required block-based discretization of elevation values. A new sand
distribution scheme for sand avalanching is proposed that converges faster than the previous work. We propose
and evaluate a new method for reptation, which was previously neglected. Our method further improves on the
performance compared with the previous real-time method and can generate results that more closely resemble
dune evolution with a bidirectional wind scheme as predicted by an accurate offline method. Our method can
generate detailed, physically plausible desert environments very quickly, with possible applications in both
computer graphics as well as geomorphology. With some restrictions, our method could even be used during
gameplay.
1 INTRODUCTION
Terrain modeling in computer graphics has seen a lot
of focus on hydraulic erosion, as water-based pro-
cesses are very common for typical landscapes and
mountain ranges. In deserts, erosion is however pre-
dominantly driven by wind. Due to effects such as
wind shadowing, many different types of sand dunes
can form. Depending on sand availability, wind con-
ditions and the presence of vegetation, we can en-
counter crescent-shaped barchan dunes, transverse
dunes, star-shaped dunes or anchored nabhka dunes.
The underlying terrain further influences wind, is
abraded by the sand and steep cliffs can lead to the
formation of echo dunes.
Aside from generating small-scale sand ripples,
proper simulation of dunes was restricted to expen-
sive offline models used in geomorphology for a long
time. With the introduction of the Desertscapes Sim-
ulation model (Paris et al., 2019), physically plausi-
ble dune simulation and aeolian sand transport be-
came feasible for computer graphics. The CPU-based
method, while not real-time, was fast enough to rea-
sonably be used for interactive terrain modeling.
In this paper, we present a novel real-time ex-
tension of the Desertscapes Simulation implemented
a
https://orcid.org/0000-0002-4196-7424
in CUDA. Our method introduces various improve-
ments over the original, as well as an existing real-
time GPU implementation that was independently de-
veloped earlier (Taylor and Keyser, 2023), further im-
proving both performance and detail of the results.
Our main contributions are 1) removal of a restric-
tion requiring elevation values to be stored as inte-
gers, greatly simplifying the algorithm; 2) usage of
bilinear interpolation instead of nearest neighbor se-
lection in wind shadow calculation, advection and the
generation of cliff cells for echo dunes, resulting in a
more robust method and smoother results; 3) removal
of the random nature of the original algorithm, re-
sulting in a noise-free, deterministic method; 4) an
improved sand distribution scheme for avalanching
that converges faster; 5) a new method for handling
reptation, which provides a big impact on simulation
results, unlike previous work. We compare our re-
sults with an offline simulation as done in (Taylor and
Keyser, 2023).
Section 2 will introduce relevant related work
concerning erosion and sand simulation in computer
graphics and geomorphology. In Section 3 we outline
our method and the various changes to previous work
and Section 4 will further explain key implementation
details. We evaluate our method and the changes we
made to the algorithm in Section 5, comparing to the
previous GPU implementation. Section 6 concludes
34
Nilles, A., Günther, L. and Müller, S.
Real-Time Desertscapes Simulation with CUDA.
DOI: 10.5220/0012315600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 34-45
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

with a summary, important limitations as well as top-
ics for further research.
We provide our entire source code in the sup-
plementary materials of this paper and additionally
make it available open source on GitHub (Nilles and
G
¨
unther, 2023).
2 RELATED WORK
Generating realistic landscapes by hand is time-
intensive and tedious, thus terrain modeling is a vast
and important field of research in computer graphics.
Early techniques include procedural generation using
noise (Mandelbrot and Van Ness, 1968; Musgrave
et al., 1989), while other approaches involve simula-
tion or example-based terrain generation (Galin et al.,
2019). We will mainly focus on interactive and real-
time simulation techniques and methods that specif-
ically target deserts, aeolian erosion and sand dunes.
For an overview of the geomorphology of dunes and
desert landscapes, we refer to the literature (Lan-
caster, 2013; Livingstone and Warren, 2019).
2.1 Hydraulic Erosion
Aeolian erosion shares similarities with hydraulic
erosion, as both wind and water are fluids that remove
material and then transport it, depositing it elsewhere.
This makes such simulation methods particularly in-
teresting, since some ideas can potentially be reused.
Hydraulic erosion has been researched extensively in
computer graphics, more so than aeolian erosion.
(Mei et al., 2007) introduced a real-time hydraulic
erosion simulation based on heightmaps. Their
method is designed for the GPU and can simulate ero-
sion of mountain landscapes by rain and rivers, yield-
ing plausible and visually interesting results.
(
ˇ
St’ava et al., 2008) propose another GPU-based
real-time simulation which supports multiple layers
of different materials and models both dissolution and
force-based erosion effects. They also support terrain
avalanching with a varying angle of repose based on
the presence of water.
Other methods such as (Kri
ˇ
stof et al., 2009) model
water fully 3D using particles with the Smoothed Par-
ticle Hydrodynamics method instead of using a 2D
heightmap as in the previous approaches, providing
more realism in terms of fluid behavior.
2.2 Aeolian Erosion
(Rozier and Narteau, 2014) developed the Real-Space
Cellular Automaton Laboratory (ReSCAL). They use
a cellular autonoma model which describes the scene
in 3D using voxels. The model is driven by a given
voxel’s state which undergoes state transitions based
on the state of neighboring voxels and a stochasti-
cally driven event-based model. ReSCAL is a gen-
eral model for computational geomorphology and can
be used for dune morphodynamics, similar to previ-
ous work (Zhang et al., 2010). The method has been
proven to accurately model sand dune formations and
has been used to drive further research in geomor-
phology such as (Gao et al., 2015; L
¨
u et al., 2018). A
more recent model called ReSCAL-Snow (Kochan-
ski et al., 2019a) can also simulate snow dunes and
was used to generate training data for deep learning.
While ReSCAL is very accurate, it is too slow to be
used in a computer graphics context, whether to au-
thor a static terrain or an animated one (Kochanski
et al., 2019b).
Early work on aeolian erosion for computer
graphics mainly focused on small scale sand rip-
ples (Bene
ˇ
s and Roa, 2004; Wang and Hu, 2009),
including handling of obstacles and later vegetation.
While these methods can run in real-time and gener-
ate convincing results, albeit not physically accurate
ones, they are not suited for large dune formations.
Later work (Wang and Hu, 2012) proposed an exten-
sion for larger terrains by applying the algorithm in
a hierarchical manner at larger scales, i.e. generating
dunes based on their similarity to small sand ripples.
The first method suitable for computer graphics
that was capable of generating large-scale desert land-
scapes was (Paris et al., 2019). Their method can gen-
erate many different types of dunes such as barchan-,
star-, nabhka and transverse dunes. It handles salta-
tion, reptation and avalanching along with aeolian
bedrock erosion all in one framework. The salta-
tion process is modeled event-driven, where events
such as sand lifting, deposition, bounces and reptation
are sampled stochastically. Their method was imple-
mented on the CPU, but is well-suited for paralleliza-
tion on the GPU. Alongside with the convincing re-
sults, we thus decided to base our own real-time GPU
simulation on their method.
Independently from us, (Taylor and Keyser, 2023)
worked on their own real-time GPU implementation
of the Desertscapes model. They proposed a straight-
forward parallelization of the original work, keeping
the stochastic nature of the saltation process. Due to a
lack of atomic operations on floating-point numbers
in Direct3D, terrain elevation was discretized into
discrete blocks stored as integers. Unlike the orig-
inal work, avalanching is not executed in an event-
based manner. Instead of detecting all necessary
avalanching events and recursively resolving all of
Real-Time Desertscapes Simulation with CUDA
35

them, which is unsuitable for parallel GPU implemen-
tations, they implement the algorithm iteratively and
make sure to execute enough iterations to reach con-
vergence. Furthermore, they extend the original ap-
proach, adding a solution for echo dunes formation
around obstacles which is based on wind tunnel ex-
periments (Tsoar, 1983). They evaluate their work
against wind tunnel simulations as well as ReSCAL
simulation results and show that the method produces
realistic results, albeit struggling to reproduce the ex-
pected results in situations of low sand availability.
3 OUR METHOD
In this section, we will explain our method, highlight-
ing the parts that differ from the original Desertscape
Simulation (Paris et al., 2019) and the previously
developed GPU implementation (Taylor and Keyser,
2023). We outline the full method for clarity, but will
only explain the unchanged portions briefly, referring
the reader to the previous work.
3.1 Discretization
While (Paris et al., 2019; Taylor and Keyser, 2023)
only support square resolutions, our simulation works
on a N ×M 2D grid of cells with periodic boundaries,
where each cell has a width of l meters. For every
cell i
i
i = (x, y), we store bedrock height b(i
i
i) ∈ (−∞,∞)
and sand height s(i
i
i) ∈ [0,∞) as heightmaps in meters,
where sand is always on top of bedrock. The com-
bined height is h(i
i
i) = b(i
i
i) + s(i
i
i). Unlike (Taylor and
Keyser, 2023), we store all quantities as floating-point
numbers and require no discretization of height into
blocks of fixed size. This is possible because CUDA,
unlike the compute shaders used in the previous work,
is capable of atomic adds on floating-point numbers.
Following (Paris et al., 2019), we furthermore
store vegetation density r
v
(i
i
i) ∈ [0,1] and bedrock ero-
sion resistance r
b
(i
i
i) ∈ [0, 1] for each cell. These quan-
tities remain unchanged throughout the simulation.
3.2 Algorithm Overview
Each simulation step uses the previously described
quantities alongside a time-varying high altitude wind
velocity w
w
w
a
and time step ∆t as input and computes
the new bedrock and sand height values for the next
time step. The main steps of the algorithm are as fol-
lows:
1. Wind Warping
2. Wind Shadow
3. Echo Dunes
4. Saltation
5. Reptation
6. Avalanching
Figure 1 shows a simplified overview of the core sand
transport loop used in our method.
3.3 Wind Warping
Since a uniform wind direction for each cell on a
large terrain is unrealistic, (Paris et al., 2019) pro-
posed a simple wind warping scheme that accounts
for venturi effects (Equation (1)) and warps the wind
direction based on the gradient of the terrain (Equa-
tion (2)). (Taylor and Keyser, 2023) note that this
scheme is fairly simplistic, but opted to use it as well
with only minor modifications as it works well in a
real time setting. While we experimented with adding
a projection step to the proposed scheme, yielding a
divergence-free (mass-conserving) wind field (Stam,
1999), we discarded the idea for increased perfor-
mance, since the effects of wind warping are com-
paratively minor in most scenes.
Venturi effects are accounted for by scaling wind
velocity based on terrain height
v
v
v(i
i
i) = w
w
w
a
(1 + k
W
h(i
i
i)) (1)
with k
W
= 5 · 10
−3
. With h
r
(i
i
i) defined as the terrain
height convolved with a Gaussian of radius r meters
(we use r = 2σ), the warped wind field is computed
according to Equations (2) and (3):
w
w
w
w
(i
i
i) = 0.2 f
50
(i
i
i) ◦ v
v
v(i
i
i) + 0.8 f
200
◦ v
v
v(i
i
i) (2)
f
i
(i
i
i) ◦ v
v
v(i
i
i) = (1 − α)v
v
v(i
i
i) + αk
h
i
∇h
⊥
i
(i
i
i) (3)
with k
h
50
= 5 and k
h
200
= 30. While our implemen-
tation is general enough to support any set of param-
eters and up to four different Gaussians, we use the
same parameters proposed in (Paris et al., 2019) and
refer to their paper for further information.
Note that in Equation (3), α is computed as the
length of ∥∇h
i
∥, thus α can be larger than 1. We
modify the original approach and clamp α to 1. In
situations with very steep cliffs, such as the scenes
proposed in (Taylor and Keyser, 2023) for their wind
tunnel experiments, gradients can become fairly large
and cause wind to completely avoid the obstacle,
causing their proposed method for echo dunes (see
Section 3.5) to have no effect. We alleviate this by
scaling gradients by a user-defined constant k
g
which
is set to 1 unless otherwise mentioned. Addition-
ally, Equation (2) does not preserve the length of v
v
v(i
i
i)
and can result in larger or smaller wind velocities. For
this reason we compute the final w
w
w(i
i
i) by restoring
w
w
w
w
(i
i
i) to be of length ∥v
v
v(i
i
i)∥.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
36
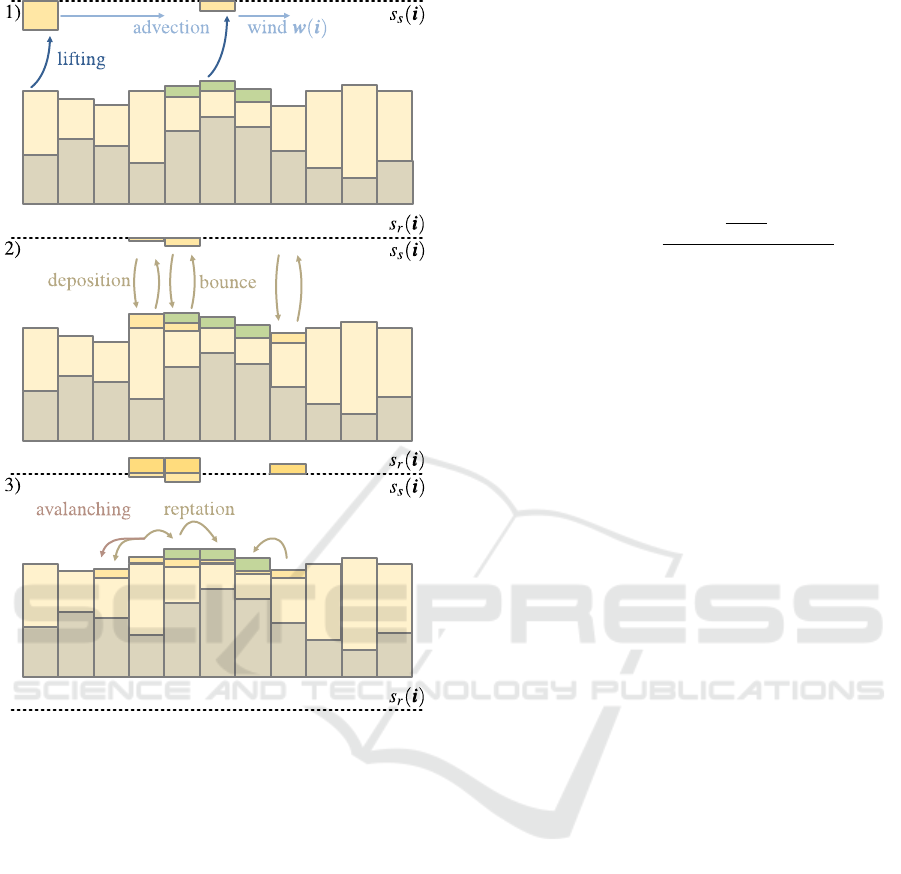
Figure 1: An overview of the sand transport used in our
method, simplified to 1D. The figure shows the cell grid in-
cluding bedrock, sand and vegetation. The slab buffer s
s
is
shown above the grid and the reptation buffer s
r
is shown
below. A more saturated shade of yellow is used to indicate
transported sand. 1) Sand is lifted from all cells in paral-
lel and stored in the slab buffer. For clarity, only two cells
are considered here. The amount of lifted sand depends
on wind shadow, vegetation density and the sticky/erosion
property of a cell. After lifting, the slab buffer is advected
forward according to the wind using bilinear interpolation.
2) The slab buffer is copied to the reptation buffer. Then,
sand is deposited from the slab buffer to the terrain. The
deposited portion depends on wind shadow, vegetation and
sticky/erosion/object properties. Sand that is not deposited
bounces, which means it stays in the slab buffer. 3) The
reptation buffer is read to control the strength of reptation,
which moves sand downwards to neighboring cells. Down-
ward slopes that exceed the angle of repose are then stabi-
lized using avalanching.
3.4 Wind Shadow
(Paris et al., 2019; Taylor and Keyser, 2023) compute
wind shadowing by stepping upwind up to a maxi-
mum distance, keeping track of the maximum eleva-
tion difference. They then compute the angle based
on the found difference, where angles of less than 10
◦
resolve to no wind shadowing and angles above 15
◦
are fully shadowed.
Note that the maximum elevation difference does
not necessarily find the maximum angle for the wind
shadow. We observed that using the maximum angle
led to better results. In linear mode, we find the max-
imum angle as
tanα(i
i
i) = max
j=1,...,N
s
h
i
i
i − j
w
w
w(i
i
i)
∥w
w
w(i
i
i)∥
− h(i
i
i)
j · l
(4)
by stepping a maximum of N
s
= 10m/l cells, with
each step as long as the width of cells. To the best of
our knowledge, (Paris et al., 2019; Taylor and Keyser,
2023) snap to nearest neighbors in their method. We
instead sample the heightfield with bilinear interpo-
lation in Equation (4). In curved mode, instead of
stepping upwind with the wind direction at the initial
cell, we update the wind direction at every step, tak-
ing a bilinear sample of the wind field at that position,
which is more accurate for scenes with highly varying
wind directions.
Using Equation (4), we then compute the wind
shadow r
s
(i
i
i) ∈ [0, 1] as the linear interpolation be-
tween tan 10
◦
and tan 15
◦
, similar to (Paris et al.,
2019).
3.5 Echo Dunes
In order to better compare our performances, we
implement the proposed method from (Taylor and
Keyser, 2023) for handling echo dunes with small
modifications, using the same default parameters but
adapted to our floating-point representation. For a de-
tailed explanation of the method and motivation, we
refer to the original work. We store the classifica-
tion into erosion and sticky cells as r
e
(i
i
i), where ero-
sion cells are encoded as negative values, while sticky
cells are encoded as their positive percentage as in the
original work. Furthermore, we implement the same
linear and curved modes from Section 3.4 and use bi-
linear interpolation instead of nearest neighbor in the
computation of cliff cells. For the classification into
erosion and sticky cells, we found no benefits with bi-
linear interpolation, so we use nearest neighbor as in
the original work, which is also much cheaper to com-
pute due to the high number of samples taken in this
step. We encode the object map by storing negative
values for the vegetation density where there are ob-
jects to save memory. As sand is never deposited on
top of objects and no avalanching is applied to them,
there is no point to vegetation density on top of them,
so we lose no functionality.
Real-Time Desertscapes Simulation with CUDA
37

3.6 Saltation
The saltation step of the algorithm handles the lifting
of sand by the wind, the advection of said sand along
the wind direction and subsequent deposition and
bouncing events. Both (Paris et al., 2019) and (Taylor
and Keyser, 2023) model this process using random
events. They assign a probability to each event, gener-
ate a random number and then only execute the event
with the given probability, moving a fixed quantity of
sand in the process.
We use a different approach to saltation that does
not use a stochastic process, which is possible in our
GPU implementation as we are using floats instead of
integers. Instead of moving a quantity of sand x with
probability p, we simply move p · x, i.e. the expected
value, while the remaining (1 − p) · x are attributed to
the situation where the event does not occur. Instead
of only executing one of the possible events, we thus
handle all of them at once with the appropriate prob-
abilities.
First, we calculate the amount of sand to be lifted
based on slab size ε
s
, wind shadow and vegetation
density as
ε
s
· (1 − r
s
(i
i
i)) · (1 − r
v
(i
i
i)). (5)
We use ε
s
= 1 if not specified otherwise. Equation (5)
is further multiplied by 0.5 if the cell is sticky and we
add k
e
= 1 if the cell is an erosion cell to support echo
dunes as described in (Taylor and Keyser, 2023). We
also limit the amount of lifted sand to the available
quantity of sand in the cell.
The lifted sand is then subtracted from the cell
and added on top of the slab buffer s
s
(i
i
i), which is
initially empty. We then advect the slab buffer us-
ing forward advection, shifting values by w
w
w(i
i
i) · ∆t/l
cells, using bilinear interpolation in the process. This
is in contrast to (Paris et al., 2019; Taylor and Keyser,
2023), who use nearest neighbor, causing advection
to fail for very small wind speeds. Additionally, they
perform this advection step multiple times, up to a
maximum number of bounces, checking for deposi-
tion events each time. We only perform one step in
each loop of the algorithm. Sand that bounces in-
stead of being deposited is left in the slab buffer,
thus supporting theoretically infinite bounces. Our
approach resembles typical advection in physics sim-
ulations. While we would have preferred to use the
backward Euler method, this was not an option since
the wind velocity field after wind warping is not mass-
conserving, which would lead to errors (Stam, 1999).
After advection, we calculate the deposition prob-
ability based on wind shadow, vegetation, stickiness
of the cell and whether it is an object or erosion cell,
as described in previous work (Paris et al., 2019; Tay-
lor and Keyser, 2023). We use the deposition prob-
ability as a percentage as described above, removing
the corresponding portion of sand from the slab buffer
and adding it onto the cell. The sand remaining in the
slab buffer is thus the sand that bounced instead of
being deposited.
In (Paris et al., 2019), bounces during saltation
trigger abrasion of bedrock if the sand layer is below
a threshold, transforming a small amount of bedrock ε
into sand. We calculate this amount as described
in the original work, scaling it with the remaining
amount of sand in the slab buffer after deposition,
which indicates how much sand bounced on this cell.
Both deposition as well as bounces trigger repta-
tion events in the original work, where the probabil-
ity of a reptation event further depends on the veg-
etation density. We store the sum of deposited and
bounced sand as s
r
(i
i
i) scaled by 1 − r
v
(i
i
i) to incorpo-
rate this into our method, where s
r
is used to indi-
cate the strength of reptation in the next step of our
method.
3.7 Reptation
While the original Desertscapes Simulation handles
reptation in their method, neither (Paris et al., 2019)
nor (Taylor and Keyser, 2023) discussed reptation in
their results. Analysis of the sample code provided
in (Paris, 2022, desert-simulation.cpp, lines 157-160)
showed a comment mentioning that the author did not
observe any difference with reptation enabled or dis-
abled. Based on the included code, the reason for this
was that the implementation only moves sand down
slopes that exceed the angle of repose, functioning
nearly identical to avalanching, thus resulting in no
visible difference.
We remove this existing flaw, allowing reptation
to move sand downward along any slope, no matter
the angle. We calculate the sand transfer between two
cells i
i
i and j
j
j by first computing the height difference,
normalized to grid coordinates
d(i
i
i, j
j
j) =
h( j
j
j) − h(i
i
i)
l · ∥i
i
i − j
j
j∥
. (6)
Equation (6) has the useful symmetry property
where d(i
i
i, j
j
j) = −d( j
j
j, i
i
i), which allows us to indepen-
dently calculate reptation for each cell, obtaining the
same magnitudes on receiving cells as on donating
cells without the need for any atomics. We scale this
quantity using the mean of both cell’s reptation values
that were computed in the saltation step.
s
m
(i
i
i, j
j
j) = k
r
· |d(i
i
i, j
j
j)| ·
1
2
(s
r
(i
i
i) + s
r
( j
j
j)) . (7)
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
38

k
r
in Equation (7) controls the overall strength of the
reptation effect. In order to account for sand avail-
ability, we restrict s
m
to the amount of available sand,
based on whether the cell is receiving or donating in
order to maintain the aforementioned symmetry prop-
erty.
s
⋆
m
(i
i
i, j
j
j) =
(
min(s
m
(i
i
i, j
j
j), s( j
j
j)) if d(i
i
i, j
j
j) ≥ 0
−min(s
m
(i
i
i, j
j
j), s(i
i
i)) if d(i
i
i, j
j
j) < 0
(8)
For each cell, we calculate the mean of Equation (8)
across its 8 neighbors and add it to the current sand
height in the cell.
3.8 Avalanching
We follow the approach in (Taylor and Keyser, 2023)
where avalanching is implemented by iteratively dis-
tributing sand downward to the 8 neighboring cells
for all cells in parallel, typically using 50 total itera-
tions. This is in contrast to the original work, which
only updates a single cell at a time and then fully sta-
bilizes that cell and all neighboring cells, adding cells
that need further stabilization into a queue until the
queue is empty. Thus, our method has no guarantee
of fully converging and requires careful selection of
the number of necessary iterations based on the scene
parameters, as explained in more detail in (Taylor and
Keyser, 2023).
In each iteration, (Taylor and Keyser, 2023) dis-
tribute sand in proportion to the tangent of angles to
neighboring cells which exceed the angle of repose.
The total amount of sand moved is set to be equiva-
lent to the maximum found height difference, scaled
by k
c
= 0.25 to avoid oscillations. For details of their
approach, we refer to the original work. We adapt
their approach to our method which uses floats, re-
moving the need for discretization into blocks and
compare our own method to this algorithm.
We propose a different scheme for sand distribu-
tion in each avalanching loop, which converges faster.
Instead of distributing based on the tangent angle, we
first calculate the exact amount of sand that is above
the angle of repose
B(i
i
i, j
j
j) = max((d( j
j
j, i
i
i) − tan θ
r
) · l · ∥i
i
i − j
j
j∥, 0), (9)
where tanθ
r
is linearly interpolated based on vege-
tation density between tan 33
◦
and tan 45
◦
(Beakawi
Al-Hashemi and Baghabra Al-Amoudi, 2018; Paris
et al., 2019). Equation (9) is then summed over
all 8 neighboring cells, yielding B
sum
(i
i
i) while keep-
ing track of the maximum value for all neigh-
bors, B
max
(i
i
i). The percentage of the total amount of
sand moved to neighbor j
j
j is then defined as p(i
i
i, j
j
j) =
B(i
i
i, j
j
j)/B
sum
(i
i
i).
We calculate the total amount of sand B
A
(i
i
i) to
move away from i
i
i as the exact amount needed to sta-
bilize the neighbor that requires the most amount of
sand to reach the angle of repose (B
max
), restricted to
the amount of available sand. Note that our B
max
is
different from the one in (Taylor and Keyser, 2023),
where it is instead the maximum elevation difference.
To achieve this, first consider that the elevation of i
i
i
will decrease by B
A
, while the target neighboring cell
will increase by B
A
B
max
/B
sum
, i.e. we want to satisfy
B
max
= B
A
1 +
B
max
B
sum
(10)
solving Equation (10) and restricting by available
sand yields Equation (11)
B
A
(i
i
i) = min
B
max
(i
i
i)
1 +
B
max
(i
i
i)
B
sum
(i
i
i)
,s(i
i
i)
. (11)
The sand distributed from i
i
i to j
j
j is then k
c
· p(i
i
i, j
j
j) ·
B
A
(i
i
i), where we use the k
c
parameter which is analo-
gous to (Taylor and Keyser, 2023). We find that k
c
= 1
is stable but leads to very small artifacts which disap-
pear as the algorithm converges and will not be no-
ticeable if sufficient iterations are used. Nevertheless,
we address these artifacts by using k
c
= 0.5 for a sub-
set of iterations, which is in contrast to the previous
method which uses k
c
= 0.25 for all iterations.
Avalanching is mainly used to stabilize the sand
layer. We optionally apply a single iteration of the
avalanching algorithm to the bedrock layer, where an-
gles are calculated using only the bedrock height, not
the total elevation, with an angle of repose of 68
◦
.
This is only needed if a lot of abrasion happens, ei-
ther due to setting a high abrasion strength or when
simulating for a very long time, smoothing results.
Bedrock moved during this process can optionally be
transformed into sand.
4 IMPLEMENTATION
We implement our method on the GPU using CUDA,
combined with OpenGL in order to visualize re-
sults in real time. The sand and bedrock elevation
map is allocated as a 2-component floating point tex-
ture in OpenGL, along with the resistance map, a
4-component floating-point texture that stores wind
shadow, vegetation density, bedrock erosion resis-
tance and stickiness. All other necessary buffers and
textures are directly allocated in CUDA.
Real-Time Desertscapes Simulation with CUDA
39

4.1 Visualization
For our visualization, we render a coarse flat grid
which is further tesselated to N × M in the tesselation
stage. The tesselation evaluation shader then reads
sand and bedrock elevation values and computes the
height of each vertex along with its normal for shad-
ing accordingly. In the fragment shader, we imple-
ment a simple phong model with no shadows. The
diffuse material color of a cell is then set to grey if
no sand is present and darkened with increased ero-
sion resistance. We interpolate toward the sand color
across a small interval of sand elevation values. If
there is vegetation present, the color is further inter-
polated towards green. If the cell is part of the object
map, we set the color to purple. This color is then illu-
minated and further mixed with red for wind shadow,
blue for erosion cells and yellow for sticky cells.
Additionally, an overlay UI can be used to control
the simulation as well as the colors used in visualiza-
tion. Most parameters of the simulation can be set
here and changed during runtime of the simulation,
with some exceptions like the resolution requiring to
restart the simulation with a button. The UI allows
to export and to load all parameters to/from JSON,
along with the elevation and resistance maps saved
as EXR files. Most of the scenes used for this paper
are included in the supplementary material and our
GitHub repository (Nilles and G
¨
unther, 2023) to facil-
itate better reproducibility. Elevation maps and resis-
tance maps can also be initialized with a very simple
procedural noise directly in the UI. The UI addition-
ally keeps track of performance metrics which we use
in our evaluation.
4.2 Simulation
The entire method as described in Section 3 is ex-
ecuted every frame in CUDA. Elevation and resis-
tance maps are mapped to CUDA beforehand, and
unmapped once all kernels are finished. Both of these
operations force a synchronization between OpenGL
and CUDA. Wind shadow calculation is fairly trivial
to parallelize, but all the other steps in our method
contain some noteworthy implementation details. For
more information, we refer to the source code in the
supplementary material or on GitHub.
4.2.1 Wind Warping
Wind Warping is straightforward to parallelize since
there are no race conditions, as the wind values at a
cell are independent from neighboring wind values
and the terrain does not change. However, wind warp-
ing uses large gaussian filters which can be a big per-
formance bottleneck. Fortunately, our grid uses peri-
odic boundaries so we can apply the convolution the-
orem.
We precompute the necessary Gaussians without
cutting them off at their radius, i.e. we write values for
the whole resolution. The result is normalized to have
a sum of 1 using a reduction operation. We then apply
an fftshift to this, which means that we do not need to
fftshift the terrain during runtime. The discrete fast
fourier transform of this is then calculated in-place
using the cuFFT library.
At runtime, we first fill a buffer with the total el-
evation. The FFT is then calculated in-place and we
perform a component-wise complex multiplication of
this spectrum with the precomputed spectrum of the
Gaussian, applying the inverse FFT afterwards, which
results in the smoothed terrain that we need for wind
warping.
4.2.2 Echo Dunes
The original approach from (Taylor and Keyser, 2023)
steps upwind starting from cliff cells, marking cells as
erosion or sticky as they are found. Note that this can
have race-conditions as it is possible for cells to be
located upwind of multiple different cliff cells.
In situations where a cell could be classified as
erosion or sticky in multiple different ways, we prior-
itize assignment as erosion cells. Cells that can only
be classified as sticky are assigned the highest found
stickiness. To achieve this, we reverse the approach.
Each cell determines its erosion and stickiness prop-
erties on its own by searching for cliff cells downwind
up to the maximum possible distance.
4.2.3 Saltation
The advection step in saltation is non-trivial to par-
allelize. We use two slab buffers to implement this.
The first buffer is filled with the lifted sand. The next
kernel then reads this buffer, computes the advected
position and performs 4 atomic adds to bilinearly in-
terpolate the result into the second buffer. In a final
kernel, we read from this second buffer, deposit sand
and write the remaining sand back into the first buffer,
while the second buffer is updated with the reptation
value s
r
.
4.2.4 Reptation
We carefully formulated reptation in Section 3.7 such
that the sand flow between two cells only depends on
these two cells and is of the same magnitude with op-
posite sign. This lets us avoid any atomic operations,
because a cell only has to update itself, not its neigh-
bors. However, an extra buffer is still necessary. This
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
40
buffer receives the total change of each cell, which
is then applied to the terrain afterwards. Without this,
we would have race conditions as the terrain of neigh-
boring cells could be updated after we already read it.
4.2.5 Avalanching
Avalanching has a lot in common with reptation, but
since it is the most performance critical portion of
the method, requiring many iterations, we decided to
use a more complicated sand transport scheme for
faster convergence. The scheme described in Sec-
tion 3.8 is not symmetric and the sand transport be-
tween two cells depends on all neighbors of the do-
nating cell, however, sand is only moved downward.
We thus need to use atomics, where a given cell up-
dates its own value, atomically subtracting the sand it
donated, and using atomic adds to push it onto receiv-
ing cells. We perform this in-place without an extra
buffer. While this has race conditions, it saves mem-
ory and was about twice as fast as the race-condition
free implementation. As sand is only subtracted by
the donating cell itself, its available sand can only
grow due to neighboring atomic adds after the value
has been read, so there is no possibility that we re-
move more sand than is available. Thus, the race con-
ditions lead to no errors and the algorithm converges
properly. Minor visual artifacts can be visible before
convergence but as we want to run enough iterations
such that the method converges, this is not a problem.
Note that while the algorithm is technically imple-
mented with atomic adds which have a reputation for
being slow, analysis with Nsight Compute on mod-
ern hardware showed that CUDA was able to replace
all atomic adds with efficient reduction operations in
our avalanching implementation. Attempts to further
manually optimize avalanching with shared memory
or other features only produced slower algorithms.
5 RESULTS
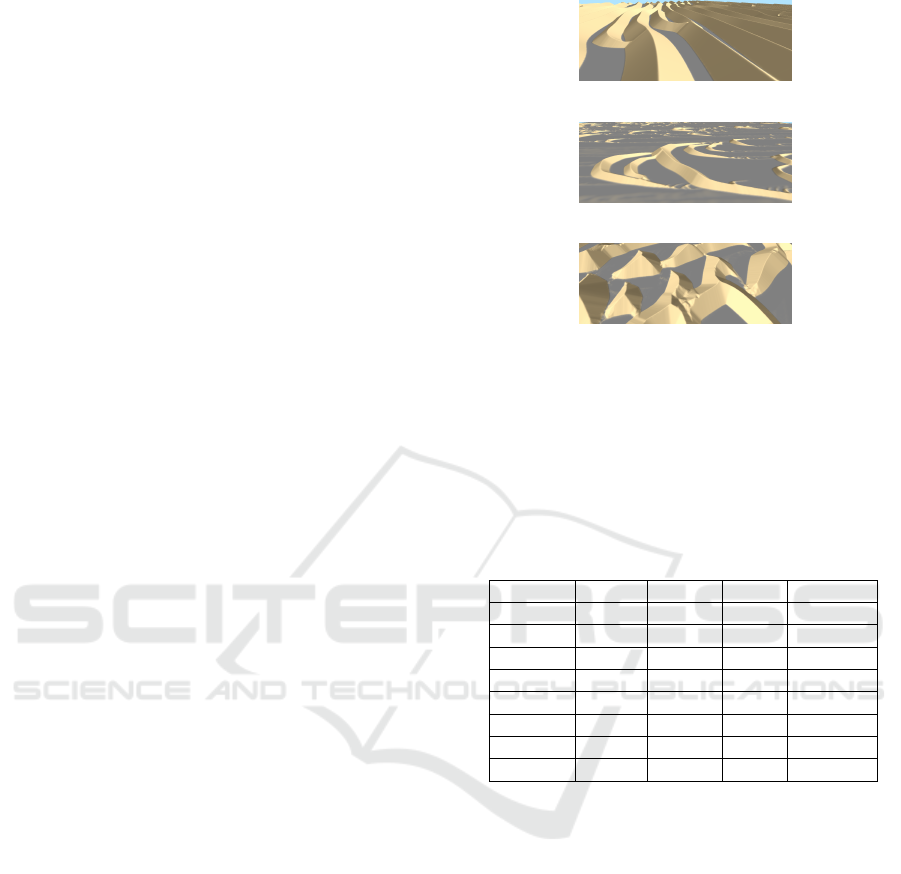
Figure 2 shows examples of different dune types gen-
erated by our method. Compared to Figure 4 in (Tay-
lor and Keyser, 2023), our results are noise-free, lead-
ing to a much clearer dune shape.
We evaluate the performance of our method on a
RTX 4080 GPU using the same two scenes as in Ta-
ble 1 (Scene A) and Table 2 (Scene B) in (Taylor and
Keyser, 2023). Results are summarized in Table 1.
Our method is 9× faster at best and 1.5× faster than
the previous GPU implementation at worst, where the
speedup is larger with lower resolutions. Note that
we do not know exactly how many avalanche iter-
(a) Transverse.
(b) Barchan.
(c) Star.
Figure 2: Different dune types generated with our method.
Compared to Figure 4 of (Taylor and Keyser, 2023), we
achieve better detail with our noise-free implementation.
ations were done in the previous work, so an exact
comparison is tricky because avalanching is the most
time-intensive portion of the algorithm.
Table 1: Simulation of 1000 steps at different resolutions in
barchan (A) and transverse (B) dune environments.
Scene l Taylor Ours Speedup
A, 512 2m 4.2s 0.46s 9.1x
B, 512 2m 4.2s 0.51s 8.2x
A, 1024 1m 8.3s 1s 8.3x
B, 1024 1m 8.3s 1.2s 6.9x
A, 2048 0.5m 24.8s 5.9s 4.2x
B, 2048 0.5m 24.8s 7.4s 3.4x
A, 4096 0.25m 97.2s 47.9s 2x
B, 4096 0.25m 121.4s 81.8s 1.5x
We made sure to use enough avalanching itera-
tions to properly converge in all situations and detail
this in Table 2, along with the time spent on the two
most significant parts of the algorithm - wind warp-
ing and avalanching. We also detail the percentage
of time spent on avalanching, which grows from 35%
at low resolutions to up to 85% at higher resolutions
and higher sand availability. In general, avalanching
performance grows not only with resolution, but also
with the inverse of the detail resolution. If cell width
is halved, dune cross-sections span twice as many
cells, which means roughly twice as many iterations
are needed to converge. This leads to a theoretical 8×
growth in our scenes as we double vertical and hori-
zontal resolution while halving cell width l.
At 1024 × 1024 resolution, a simulation step only
takes about 1ms with our method. This means that this
resolution could feasibly be simulated in real-time in
games during gameplay, where the time budget is ex-
Real-Time Desertscapes Simulation with CUDA
41
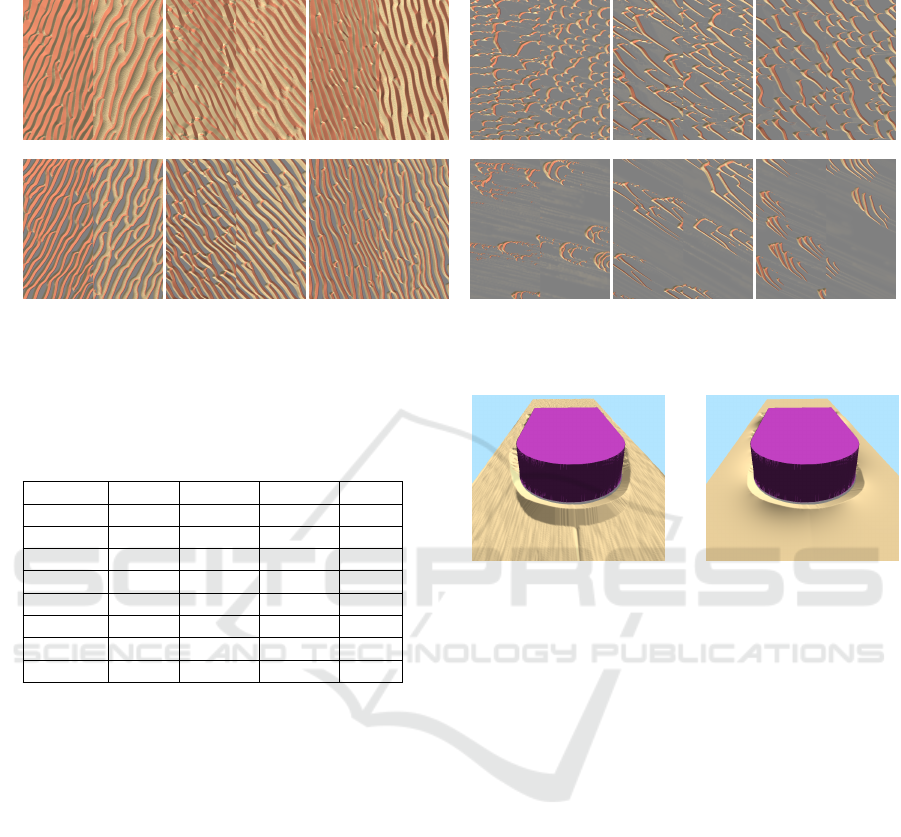
θ = 45
◦
θ = 105
◦
θ = 150
◦
θ = 45
◦
θ = 105
◦
θ = 150
◦
φ = 100%
φ = 22%
φ = 64%
φ = 7%
Figure 3: Dune formation under a bidirectional wind scheme with varying sand availability φ. θ is the angle between the two
wind vectors. The left half of each image has reptation disabled, while the right half uses a high reptation strength. Results
are very smiliar to Figure 3 in (L
¨
u et al., 2018) and match more closely than (Taylor and Keyser, 2023) in many cases.
Table 2: Average time spent on wind warping and avalanch-
ing in each simulation step and the percentage of time
spent on avalanching. The last column shows how many
avalanching iterations were done per step.
Scene WW Aval. %Aval. Iters.
A, 512 0.1ms 0.16ms 35% 13
B, 512 0.1ms 0.19ms 37% 15
A, 1024 0.2ms 0.57ms 57% 25
B, 1024 0.2ms 0.76ms 63% 31
A, 2048 1ms 3.9ms 66% 50
B, 2048 1ms 5.5ms 74% 62
A, 4096 6.9ms 34.9ms 73% 100
B, 4096 6.9ms 69.4ms 85% 125
tremely limited. At higher resolutions such as 2048 ×
2048 we would need to simplify the method. With-
out wind warping and with low wind speed such that
15 avalanching iterations are enough, we can reach
2.3ms per time step. If we further split the algorithm
over two frames, we can reduce this to 1.4ms which
is the time spent on just avalanching. To support
the full method at this resolution we would have to
split the avalanching iterations over multiple frames
as well, in which case a 1ms target is possible even
with wind warping. Our method is thus suitable for
use during gameplay at high resolutions. The main
challenge would be collision handling, since eleva-
tion values exist on the GPU, but collision is usually
done on CPU.
We evaluate our method against an established
offline method in a bidirectional wind scheme with
strength ratio R = 2 at different wind angles θ and
sand availability φ in the same way as the previous
work (Taylor and Keyser, 2023; L
¨
u et al., 2018). Re-
sults are shown in Figure 3. We evaluated each set of
parameters using no reptation as well as using a high
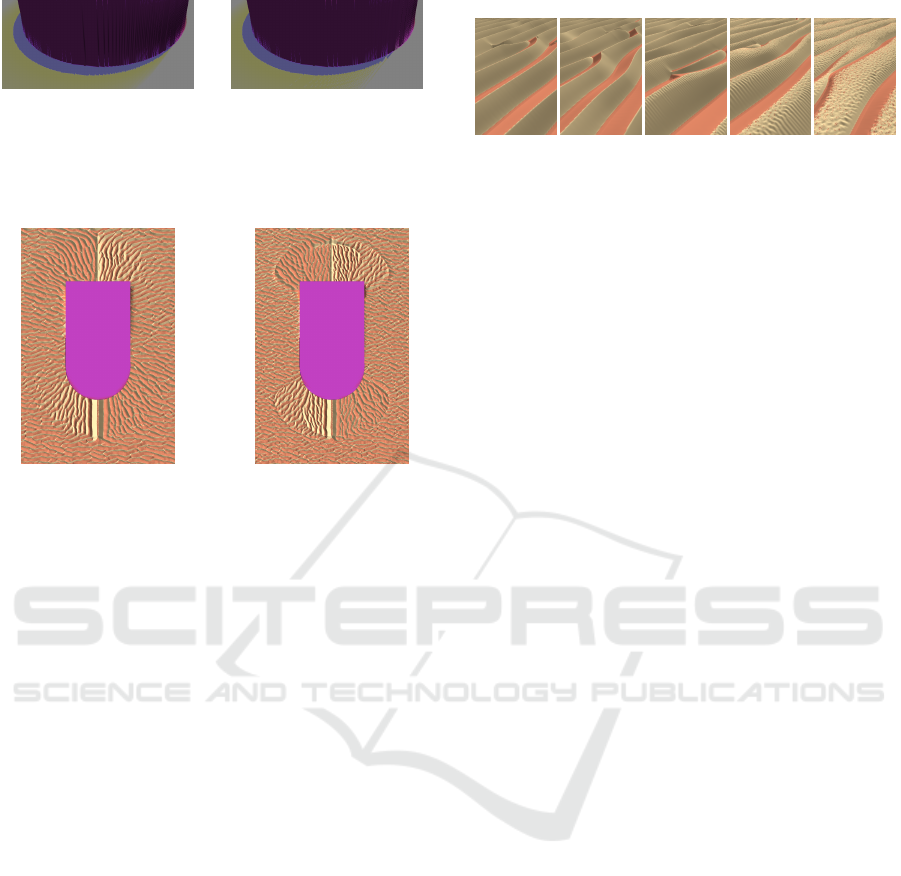
(a) Without reptation. (b) With reptation.
Figure 4: Example of an echo dune in a wind tunnel similar
to Figure 8 in (Taylor and Keyser, 2023) at a 2048 × 512
resolution. The aliased nature of the obstacle is visible in
the dune, which is smoothed using our reptation algorithm.
reptation strength. Compared to the previous work,
our results at φ = 22%,θ ≥ 105
◦
match the reference
more closely, where we can reproduce the long tails
that form on dunes. Additionally, our reptation algo-
rithm manages to generate dune shapes that are much
more consistent with the reference, reproducing the
rounder dune shapes and matching the width of the
windward side of the dune in relation to the leeward
side more closely. At φ = 7%, θ ≥ 105
◦
, we struggle
to reproduce the results of the offline method, just like
the previous work. While we do generate long linear
dunes and small detached barchans, they do not merge
to a single dune. It is possible that this is just a matter
of initial conditions, as we iteratively place small cir-
cles of sand at random positions until the target sand
availability is reached.
Figure 4 shows a scene similar to the wind tun-
nel experiments in (Taylor and Keyser, 2023) using
a round obstacle. Unlike previous work, we support
non-square resolutions, removing a significant limi-
tation for such scenes. With reptation disabled, the
aliased nature of the obstacle is visible in our dune
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
42
(a) Bilinear interpolation. (b) Nearest neighbor.
Figure 5: Sticky (yellow) and erosion (blue) cells around
an obstacle at a grazing wind angle. Using bilinear inter-
polation in cliff cell generation removes holes in the cell
classification.
(a) Bilinear interpolation. (b) Nearest neighbor.
Figure 6: A scene with strong wind warping around an ob-
stacle. Using bilinear interpolation in advection and wind
shadow calculation, the dunes smoothly follow the wind
field, while nearest neighbor leads to visible discontinuities.
shape. This wasn’t visible in the previous work, but
we note that this may have been hidden by the noise
of their method as well as the smaller size of the echo
dune in their example. If we enable our new repta-
tion method, the dune shape is smoothed significantly
and the artifacts are no longer visible. In Figure 5
we show the same obstacle, visualizing the generated
sticky and erosion cells at a wind angle of 70
◦
. With
the original cliff cell generation that uses the near-
est upwind neighbor cell, some cells at grazing an-
gles aren’t classified properly. Our method with bilin-
ear interpolation in cliff cell generation removes these
problems.
Bilinear interpolation during advection and wind
shadow calculation also leads to large improvements
over nearest neighbor. At low wind speeds, nearest
neighbor would either generate no movement at all,
or a much faster movement than intended, which is
solved with bilinear interpolation. Figure 6 shows an
example scene with strong wind warping around an
obstacle. With our method, dune orientation smoothly
follows the warped wind field. With the previous
nearest neighbor implementation, clear discontinu-
ities and artifacts are visible.
Using curved mode in wind shadow calculation
had a negligible impact in the scenes we tested, pro-
viding little benefit for its computational cost. Hence,
we used the simpler linear mode for all results pre-
k
r
= 0 k
r
= 1 k
r
= 5 k
r
= 10 k
r
= 20
Figure 7: Transverse dunes at different reptation
strengths k
r
.
sented in this paper which is also what was used in
previous work.
Figure 7 shows a transverse dune environment at
different reptation strengths k
r
. At k
r
= 1, our rep-
tation method has a smoothing effect which can im-
prove results significantly (see also Figure 4). With
higher reptation strengths the dune shape is changed
significantly, where the windward side grows wider
with reduced angle, while the leeward side shrinks.
As described earlier, this type of dune shape is more
consistent with simulation results using offline meth-
ods established in geomorphology (see Figure 3).
However, high reptation strengths also introduce rip-
ples parallel to the wind direction on the windward
side of dunes which oscillate with each simulation
step. At even higher strengths, the linear ripples re-
cede and are replaced by circular ripples. While these
ripples look visually interesting and match sand rip-
ples, they are oriented the wrong way and the oscilla-
tions make this unsuitable in animation.
We evaluate our new sand distribution scheme for
avalanching against the previous method in (Taylor
and Keyser, 2023). Figure 9 shows a 100 × 100 cell
column of height 400m after 250 steps of 50 avalanch-
ing iterations each. Using our method with k
c
= 1, the
sand column is almost fully stabilized and the artifacts
are already barely visible. If we use k
c
= 0.5 for ev-
ery 10th iteration as well as the last 5 iterations in each
simulation step, convergence is slightly slower at the
benefit of further reducing artifacts. Note that all ar-
tifacts are gone once convergence is reached, so this
is not really necessary if enough iterations are used
at runtime. (Taylor and Keyser, 2023) used k
c
= 0.25
with their algorithm, but we also include k
c
= 0.5 in
our comparison as it behaved stable in our implemen-
tation, likely because we are using floats for elevation
instead of integers. At k
c
= 0.5, their method is still
further from convergence than both of our examples,
while exhibiting stronger artifacts. Using k
c
= 0.25,
convergence is very slow. Our method needs signifi-
cantly fewer steps to reach convergence. We suspect
that our performance measurements in Table 1 would
compare even better if we knew the exact number of
iterations used in the previous work, which would al-
low us to exactly match the number of iterations to
Real-Time Desertscapes Simulation with CUDA
43
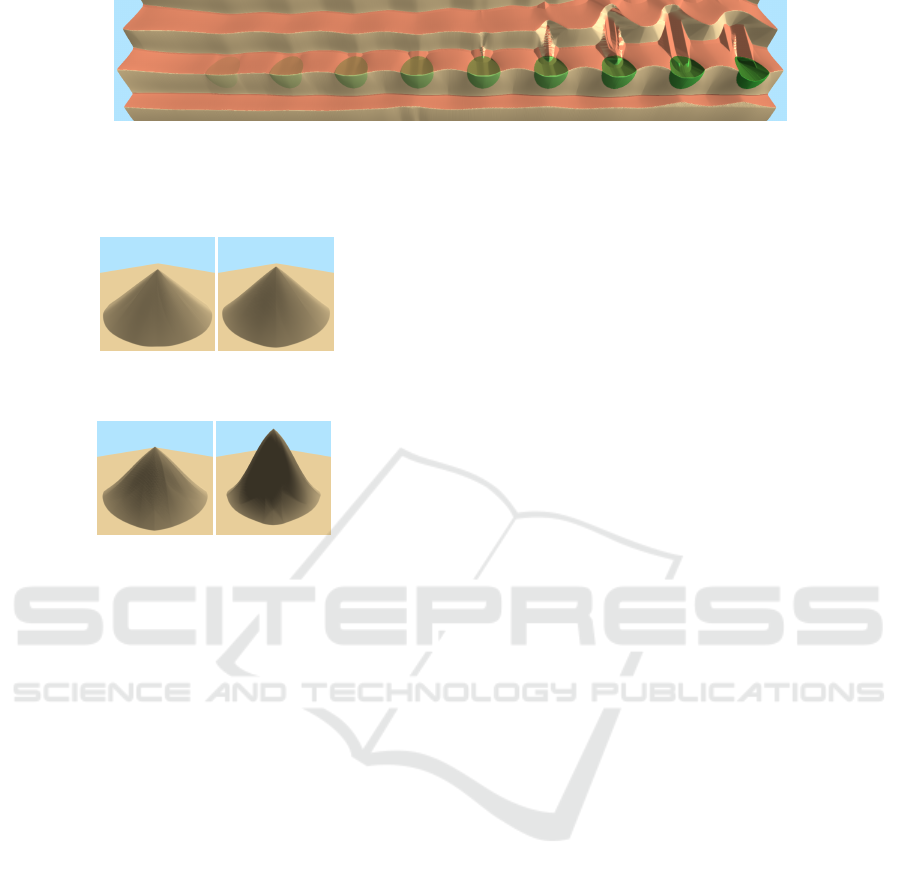
Figure 8: The impact of circular patches of vegetation (green) on transverse dunes. Dunes are moving upward in this image
and vegetation density of each patch increases from 0 to 1 (left to right). Vegetation significantly alters sand transport and has
a large impact on dune morphology as it acts as a soft barrier in all sand transport calculations.
k
c
= 1 k
c
= {1,0.5}
(a) Ours.
k
c
= 0.5 k
c
= 0.25
(b) Taylor.
Figure 9: Comparison of our avalanching algorithm
with (Taylor and Keyser, 2023). The previous work
used k
c
= 0.25 but works stable at k
c
= 0.5 in our imple-
mentation. In our method, k
c
= {1, 0.5} means that every
10th iteration and the final 5 iterations use the lower value.
reach the same level of convergence.
Lastly, all previous scenes were done with a veg-
etation density of 0, as we are comparing against re-
sults of previous work which did not include vegeta-
tion. Furthermore, our approach to vegetation is un-
changed from previous work. For completeness, Fig-
ure 8 shows the impact of patches with increasing
vegetation density in a transverse dune scenario. Veg-
etation alters the dune shape, leads to steeper slopes
and at higher densities, new dunes can form behind
vegetation.
6 CONCLUSION
In conclusion, our real-time GPU implementation fur-
ther improves on the performance of previous work.
The significant increase in performance makes our
method viable during gameplay at a 1 − 2ms budget,
even at high resolutions such as 2048
2
, which was not
feasible in previous work.
Our method generates improved results compared
to previous work, producing smoother dune shapes
due to the removal of randomness and thus noise in
our algorithm. The bilinear interpolation shows sig-
nificant improvements in wind warping scenarios as
well as wind angles that are misaligned with the cell
discretization and shows improvement in cell classi-
fication of echo dunes. We also show improvements
in the shape of dunes generated by our method, espe-
cially using our new reptation algorithm, producing
results that match the reference offline method more
closely overall. The support for non-square resolu-
tions makes our method more versatile than previous
work.
Like previous work, the main limitation is in res-
olution. All buffers and textures need to be avail-
able at the same time on the GPU, so we are limited
by VRAM. Performance currently scales increasingly
worse with higher resolutions due to memory band-
width.
For future work, in the short-term we would like to
extend the method to handle a bigger variety of land-
scapes. The simulation could be combined with a hy-
draulic erosion method such as (
ˇ
St’ava et al., 2008).
In order to use our simulation to change landscapes
during gameplay, we need a reliable way to handle
dynamic objects. Static objects that affect the simula-
tion one-way are already possible using the bedrock
and object map, but dynamic objects such as play-
ers or vehicles need to be able to collide with the
terrain which currently exists as a heightmap on the
GPU, posing problems for physics engines. However,
one-way as well as two-way collision methods exist
for GPU-based fluid simulations using heightmaps, so
this is possible.
In the medium term, we would like to further
improve reptation. The oscillating ripples that can
form at high strengths are a problem. Additionally,
we would like to see improvements to the vegetation
model, including two-way interactions. For example,
by introducing a water model, vegetation could dy-
namically grow and wither. Sand transport could be
enhanced to allow vegetation to be buried.
Long term, performance improvements are still
possible. The main focus should be avalanching as
it has the biggest performance impact. We made
attempts to speed up avalanching with a multigrid
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
44

solver but were unable to achieve satisfying, artifact-
free results. The corresponding code can be found in
the supplementary material or on GitHub. Based on
our initial attempts, a multigrid solver could improve
performance by 2-8 times.
Lastly, while our focus was on performance with
realtime computer graphics in mind, increasing real-
ism of the method would be important for applica-
tions in geomorphology. A tiled simulation would en-
able simulating very large scale scenes on super com-
puters. Furthermore, we think that the simplistic wind
model is the reason why scenes with low sand avail-
ability do not behave as expected. A proper 3D wind
simulation may be able to solve some of these issues.
REFERENCES
Beakawi Al-Hashemi, H. M. and Baghabra Al-Amoudi,
O. S. (2018). A review on the angle of repose of gran-
ular materials. Powder Technology, 330:397–417.
Bene
ˇ
s, B. and Roa, T. (2004). Simulating desert scenery.
WSCG ’2004: Short Communications: the 12-th In-
ternational Conference in Central Europe on Com-
puter Graphics, Visualization and Computer Vision
2004, pages 17–22.
Galin, E., Gu
´
erin, E., Peytavie, A., Cordonnier, G., Cani,
M.-P., Benes, B., and Gain, J. (2019). A review of
digital terrain modeling. Computer Graphics Forum,
38(2):553–577.
Gao, X., Narteau, C., Rozier, O., and Du Pont, S. C. (2015).
Phase diagrams of dune shape and orientation depend-
ing on sand availability. Scientific reports, 5(1):14677.
Kochanski, K., Defazio, G.-C., Green, E., Barnes, R.,
Downie, C., Rubin, A., and Rountree, B. (2019a).
Rescal-snow: Simulating snow dunes with cellular au-
tomata. Journal of Open Source Software, 4(42):1699.
Kochanski, K., Mohan, D., Horrall, J., Rountree, B., and
Abdulla, G. (2019b). Deep learning predictions of
sand dune migration. CoRR, abs/1912.10798.
Kri
ˇ
stof, P., Bene
ˇ
s, B., K
ˇ
riv
´
anek, J., and
ˇ
St’ava, O. (2009).
Hydraulic erosion using smoothed particle hydrody-
namics. Computer Graphics Forum, 28(2):219–228.
Lancaster, N. (2013). Geomorphology of desert dunes.
Routledge.
Livingstone, I. and Warren, A. (2019). Aeolian geomor-
phology: a new introduction.
L
¨
u, P., Dong, Z., and Rozier, O. (2018). The combined
effect of sediment availability and wind regime on
the morphology of aeolian sand dunes. Journal of
Geophysical Research: Earth Surface, 123(11):2878–
2886.
Mandelbrot, B. B. and Van Ness, J. W. (1968). Fractional
brownian motions, fractional noises and applications.
SIAM Review, 10(4):422–437.
Mei, X., Decaudin, P., and Hu, B.-G. (2007). Fast hydraulic
erosion simulation and visualization on gpu. In 15th
Pacific Conference on Computer Graphics and Appli-
cations (PG’07), pages 47–56.
Musgrave, F. K., Kolb, C. E., and Mace, R. S. (1989).
The synthesis and rendering of eroded fractal terrains.
In Proceedings of the 16th Annual Conference on
Computer Graphics and Interactive Techniques, SIG-
GRAPH ’89, page 41–50, New York, NY, USA. As-
sociation for Computing Machinery.
Nilles, A. M. and G
¨
unther, L. (2023). Cuda
dune simulation. https://github.com/Clocktown/
CUDA-Dune-Simulation.
Paris, A. (2022). Desertscapes simulation. https://github.
com/aparis69/Desertscapes-Simulation/commit/
38298220d0182d97ff1f12e7f6aa8850fac1b52b.
Paris, A., Peytavie, A., Gu
´
erin, E., Argudo, O., and Galin,
E. (2019). Desertscape simulation. Computer Graph-
ics Forum, 38(7):47–55.
Rozier, O. and Narteau, C. (2014). A real-space cellular
automaton laboratory. Earth Surface Processes and
Landforms, 39(1):98–109.
Stam, J. (1999). Stable fluids. In Proceedings of the 26th
Annual Conference on Computer Graphics and Inter-
active Techniques, SIGGRAPH ’99, page 121–128,
USA. ACM Press/Addison-Wesley Publishing Co.
ˇ
St’ava, O., Bene
ˇ
s, B., Brisbin, M., and K
ˇ
riv
´
anek, J.
(2008). Interactive terrain modeling using hydraulic
erosion. In Proceedings of the 2008 acm sig-
graph/eurographics symposium on computer anima-
tion, pages 201–210.
Taylor, B. and Keyser, J. (2023). Real-time sand dune sim-
ulation. Proc. ACM Comput. Graph. Interact. Tech.,
6(1).
Tsoar, H. (1983). Wind tunnel modeling of echo and climb-
ing dunes. In Brookfield, M. and Ahlbrandt, T., ed-
itors, Eolian Sediments and Processes, volume 38 of
Developments in Sedimentology, pages 247–259. El-
sevier.
Wang, N. and Hu, B.-G. (2009). Aeolian sand movement
and interacting with vegetation: A gpu based simula-
tion and visualization method. In 2009 Third Interna-
tional Symposium on Plant Growth Modeling, Simula-
tion, Visualization and Applications, pages 401–408.
Wang, N. and Hu, B.-G. (2012). Real-time simulation of
aeolian sand movement and sand ripple evolution: a
method based on the physics of blown sand. Journal
of Computer Science and Technology, 27(1):135–146.
Zhang, D., Narteau, C., and Rozier, O. (2010). Morphody-
namics of barchan and transverse dunes using a cel-
lular automaton model. Journal of Geophysical Re-
search: Earth Surface, 115(F3).
Real-Time Desertscapes Simulation with CUDA
45
