
ML-Tree and MRL-Tree: Combining Mass-Spring System, Rigid-Body
Dynamics and L-Systems to Model Physical Effects on Trees
See Min Lim
1 a
and Like Gobeawan
2 b
1
National University of Singapore, 21 Lower Kent Ridge Road, Singapore
2
Institute of High Performance Computing (IHPC), Agency for Science, Technology and Research (A*STAR),
1 Fusionopolis Way #16-16 Connexis, 138632, Singapore
Keywords:
Physically-Based Modeling, Tree Modeling, Root Modeling, L-Systems, MSS, RBD.
Abstract:
We apply physically-based modeling methods to a biological tree model for a hybrid model with a better
accuracy. Physical aspects of tree growth, such as wind, tropisms, gravity and soil resistance are modelled.
The hybrid model also includes the handling of boundary conditions such as momentum conservation and
switching between the L-System, Mass-Spring System (MSS) and Rigid-Body Dynamics (RBD) methods.
This paper demonstrates resulting models and their potential applications such as tree stress prediction.
1 INTRODUCTION
Trees and other greeneries are planted at urban areas
to provide shade and to reduce temperatures (Wong
et al., 2021). Along with that, they may cause safety
hazards due to uprooting and falling branches. They
can be managed through measures like tree health as-
sessment and tree pruning.
Given the increasing prominence of digital twin
cities (Ballouch et al., 2022) (Tao et al., 2022)
(Pomeroy, 2023), there are great potentials for digi-
tal twin trees through an automated large-scale tree
management system such as (Gobeawan et al., 2021a)
(Gobeawan et al., 2018) to consider biological growth
rules and mechanical responses to the environment.
Such digital twin trees can be utilised to predict tree
branch stress and uprooting.
2 RELATED WORK
Some existing L-System-based tree modelling tech-
niques (Gobeawan et al., 2021b) (Yi et al., 2018)
(Stava et al., 2014) focus on implementing tree
growth processes without accounting for the tree
tropisms, which are tree growth responses to environ-
ment stimuli. Accounting for such responses will al-
low for more accurate tree models in urban contexts of
a
https://orcid.org/0009-0008-0576-556X
b
https://orcid.org/0000-0001-6501-6394
intertwining environment components, hence a better
urban planning. (Moulton et al., 2020) and (H
¨
adrich
et al., 2017) account for tree growth responses as me-
chanical responses by modelling tree stems as inex-
tensible elastic rods and particles, respectively. How-
ever, neither of them integrates the domain knowl-
edge of botanical growth processes such as branch-
ing patterns. (Jirasek et al., 2000) is similar, but it
is L-System-based (Prusinkiewicz and Lindenmayer,
1990) thus allowing for some biological considera-
tions. However it does not consider interactions be-
tween parent and child branches.
Our previous work (Lim and Gobeawan, 2023)
combines Mass-Spring System (MSS) and L-Systems
to generate biologically- and physically-plausible tree
models. This current work will provide crucial imple-
mentation details and results, as well as discuss new
work on root modeling and including Rigid-Body Dy-
namics (RBD).
3 METHODS
Our tree models were generated based on (Gobeawan
et al., 2021b) where stems were built by produc-
ing new node-and-internode pairs at the buds based
on L-System growth rules over time. During the
growth process, we concurrently built a MSS into our
tree models to model mechanical responses for our
first model of Mass-Spring L-Systems (henceforth de-
220
Lim, S. and Gobeawan, L.
ML-Tree and MRL-Tree: Combining Mass-Spring System, Rigid-Body Dynamics and L-Systems to Model Physical Effects on Trees.
DOI: 10.5220/0012315200003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 220-227
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

noted as ML-Tree). For our second Mass-Spring L-
Systems with RBD model (denoted as MRL-Tree),
we further added RBD to model older portions of the
tree.
With these models, we considered tropisms (pho-
totropism and gravitropism), weight of the tree nodes,
roots and soil resistance. Stress prediction and auto-
matic branch-breaking were also tested in the former
model.
Our images and models were generating using L-
Py and PlantGL (Boudon et al., 2012).
3.1 Mass-Spring L-System (ML-Tree)
When incorporating the MSS (Witkin et al., 2001)
onto the L-System layer, we consider the nodes to be
point masses while the internodes were springs. The
algorithm is described in the following pseudocode:
initialization;
for number of age timesteps do
tree grows for 1 unit of age by L-System
production rules;
for number of substeps do
calculate forces acting on each MSS
node;
calculate and update new position of
each node;
end
end
Algorithm 1: ML-Tree.
Firstly, we initialised expandable matrices to keep
track of nodal information and spring connection in-
formation. We also set the growth and physical vari-
ables (such as the trunk height and wind speed) to spe-
cific values or as functions. The tree then grows for
one unit of age by L-System production rules, where
one unit of age is the time needed to grow one node-
and-internode pair at each bud. This is the smallest
unit of growth possible in our model, chosen to min-
imise the time lag between the growth and the apply-
ing of forces. We then added the new node(s) grown,
their corresponding nodal information and the new
spring(s) information to the bookkeeping matrices.
Internal forces acting on each node (such as the spring
forces) are calculated based on the MSS model. Other
external forces acting on the nodes (such as gravity
and tropisms) are also calculated and added, and new
positions after the substep are found. This force and
position calculation is then repeated for the number
of substeps. This tree growth and force-and-position
calculation then repeats until the tree has reached its
specified age.
3.1.1 Conserving Momentum
In our model, the total and individual masses regu-
larly increases, hence the law of conservation of linear
momentum must be considered.
During the growth process, when a new node j is
grown, it shares the original linear momentum, m
t
i
v
t
i
,
of the node i which it grew from. Nodes i and j have
the same new velocity, v
t+δt
, since forces are not con-
sidered during this growth stage. To simplify calcu-
lations, we assume that new nodes are grown instan-
taneously at the start of the growth process, thus the
mass for the older node i at times t and t + δt are con-
sidered the same. We calculate the new velocities of
nodes i and j through Equation 1. m
t+δt
j
is the small-
est mass a new node can have in our model.
v
t+δt
j
= v
t+δt
i
=
m
t
i
v
t
i
m
t+δt
i
+ m
t+δt
j
(1)
At the end of each age timestep, the mass of the
nodes are recalculated by multiplying the new volume
of their internodes with the wood density. The veloc-
ity of nodes are re-calculated by dividing the original
linear momentum with the new mass.
3.1.2 Spring Constants and Angle Springs
The spring constant of each spring are directly pro-
portional to the diameter d of the internode and in-
versely proportional to the internode’s rest length l
(Smith, 2010). The values of the spring constants
were roughly based on the spring constants of wood in
(Russell and Hunt, 2009). Nodes which have reached
a certain wooden age are considered to be woody and
will have a stiffer base spring constant k
0
.
k =
k
0
d
l
(2)
Secondary (angle) springs were added between al-
ternate nodes to control angles, similar to (Van Haevre
et al., 2006). We used the same Equation 2 to find the
secondary spring constants, and we did not differenti-
ate between the spring types for k
0
.
3.1.3 Implicit Method Equations
We used an implicit Euler method (or backward Eu-
ler) for integration in our MSS. We tested two equa-
tions to estimate ∆v
t+h
i
, Equation 3 (Kang et al.,
2001) and Equation 4 (Kang et al., 2000) (Mesit et al.,
2007).
˜
F
t
i
is the sum of all forces acting on node i at
time t, and its unit vector is
ˆ
F
t
i
.
ML-Tree and MRL-Tree: Combining Mass-Spring System, Rigid-Body Dynamics and L-Systems to Model Physical Effects on Trees
221
∆v
t+h
i
=
˜
F
t
i
h+h
2
Σ
(i, j)∈E
k
i j
˜
F
t
j
h/(m
j
+h
2
Σ
( j,k)∈E
k
jk
)
m
i
+h
2
Σ
(i, j)∈E
k
i j
(3)
∆v
t+h
i
=
˜
F
t
i
h + h
2
Σ
(i, j)∈E
k
i j
|∆v
t
j
|
ˆ
F
t
j
m
i
+ h
2
Σ
(i, j)∈E
k
i j
(4)
These implicit methods required artificial damp-
ing for stability, which is given by Equation 5 in our
model.
F
damping
= c
p
k(m
1
+ m
2
)(v
j
− v
i
) (5)
It is chosen to be proportional to
p
k(m
1
+ m
2
)
to account for changing masses and spring constants
since we are modeling a growing tree. This coeffi-
cient is based on the formula for the critical damping
coefficient, although we note that this Equation 5 is
not always able to achieve stability across all portions
of the tree.
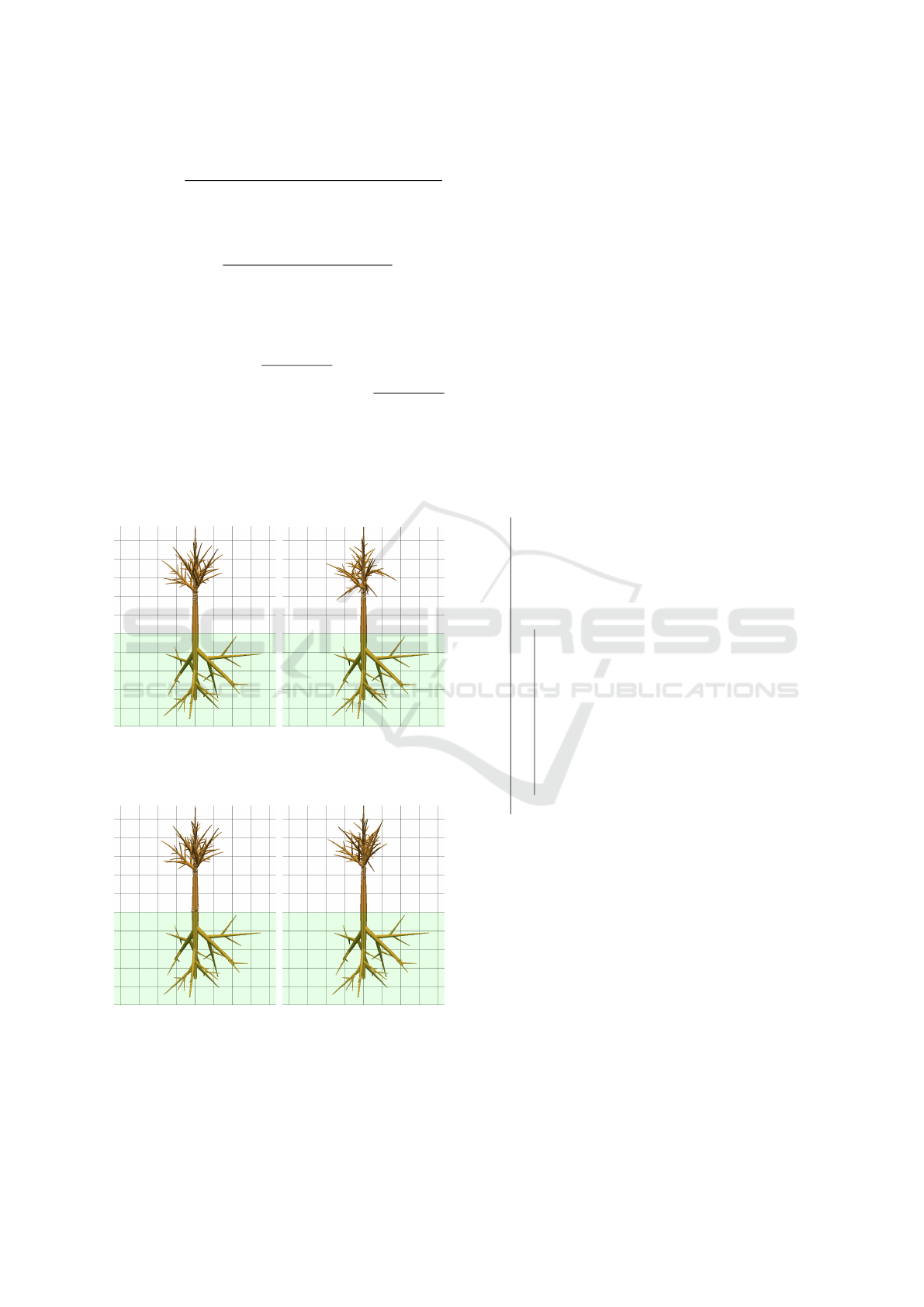
(a) Equation 3. (b) Equation 4.
Figure 1: Comparison of the ML-Tree model using Equa-
tion 3 and 4.
(a) Equation 3. (b) Equation 4.
Figure 2: Another comparison of the model using Equations
3 and 4.
Figure 1 attains a stable configuration of damping
and spring constants for using Equation 3, and it is
compared with how Equation 4 perform for the same
set of variables. We tried to achieve the opposite sit-
uation in Figure 2, but we see that Equation 3 is sim-
ilarly realistic. Equation 3 tended to produce largely
realistic and stable models over a range of damping
and spring constants, while Equation 4 was only sta-
ble and realistic across a much narrower range.
3.2 Mass-Spring L-System with RBD
(MRL-Tree)
Our second model adds RBD (Baraff, 2001) (Peder-
sen, 2003) onto the existing MRL-Tree model. This
is described in algorithm 2. We used quaternions
(Betsch and Siebert, 2009) for the rotation and a 4-
th order Runge-Kutta (Pedersen, 2003) to solve the
differential equations.
initialization;
for number of age timesteps do
tree grows for 1 unit of age by L-System
production rules;
add nodes which have reached a specified
rigid age to the Rigid-Body (RB)
system;
for number of substeps do
calculate forces acting on each RB
node;
calculate and update new position of
each RB node;
calculate forces acting on each MSS
node;
calculate and update new position of
each MSS node;
end
end
Algorithm 2: MRL-Tree.
Our algorithm for this MRL-Tree model is similar
to that for the first model, except that the forces and
positions of the RB nodes are considered first before
that of the MSS nodes during each substep.
3.2.1 Handling Boundary Conditions for RBD
When a node reaches a specified age, it is considered
to have hardened and is added to the RB system. In
this subsection, t is at the end of the L-System stage
and t + δt is after the checking of age and assigna-
tion to the RB system, at the start of the first substep.
Nodes j are these new RB nodes while nodes i are
existing RB nodes.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
222
The centre of mass of the RB system x and the
system’s linear momentum p can be directly calcu-
lated through Equations 6 and 7. M is the sum of
mass of the RB system. However since the RB sys-
tem is constantly increasing in size, the centre of mass
does not have a constant position relative to other po-
sitions in the RB system, therefore its original angular
momentum L
t
is not conserved. Hence, we hypothe-
sise that in Equation 8, an extra term Σ(x
t+δt
∆i
× m
t
i
v
t
i
)
should be added to account for any change in angu-
lar momentum due to the changing position of the
centre of mass. In Equation 8, x
t+δt
∆i
refers to the
relative position of node i at time t (or t + δt), to
the centre of mass at time t + δt; in other words,
x
t+δt
∆i
= x
t
i
− x
t+δt
.
x
t+δt
=
Σm
t
i
x
t
i
+ Σm
t
j
x
t
j
M
t+δt
(6)
p
t+δt
= p
t
+ Σm
t
j
u
t
j
(7)
L
t+δt
≈L
t
+ Σ(x
t+δt
∆ j
× m
t
j
v
t
j
)
+ Σ(x
t+δt
∆i
× m
t
i
v
t
i
)
(8)
3.3 Gravity, Phototropism,
Gravitropism, Wind and Air
Viscosity
Gravity, F
g
, was calculated by multiplying the node’s
mass with g, the acceleration due to gravity on Earth.
Phototropism refers to the plant’s reorientation
towards light source and we modelled it with a
F
phototropism
which pulls the buds towards a specified
point of light (Moulton et al., 2020). Its magnitude is
a constant multiplied by the intensity of the light. The
light intensity is inversely proportional to the square
of the distance between the bud and the light source.
In future work, auxins should be considered to im-
prove accuracy (Zhou et al., 2017).
Gravitropism is the response of a plant to gravity.
Generally, the plant reorientates itself against the di-
rection of gravity and we modelled this F
gravitropism
based on the sine law method (Dumais, 2013). It is
applied on all nodes except the buds.
Wind was modelled using Equation 10, using a
general wind load formula. The constant in Equation
9 is only applicable for metric system of units, and
0.00256 should be used for the imperial system of
units. A is the area of the object for which we took the
cross-sectional area of the node, P is the wind pres-
sure and C
drag
is the drag coefficient (set to 1 in our
model (Suzuki and Arikawa, 2010)).
P = 0.613|v
wind
|
2
(9)
F
wind
= (A × P ×C
drag
)
ˆ
d
wind
(10)
Air viscosity was modelled based on Stokes’ Law
(Equation 11). In our model, η is the fluid viscosity
(1.81 × 10
−5
for air), R is the radius of the node and v
is the velocity of the node.
F
drag
= 6πηRv (11)
3.4 Roots and Soil Resistance
There is currently a lack of research on root architec-
ture and modeling (Harahap et al., 2018)(Alani and
Lantini, 2020), especially those using a compatible L-
System method or for trees. This is partly due to the
difficulty in collecting underground root data, though
there has been recent advances in non-destructive root
testing methods (Alani and Lantini, 2020) (Atkinson
et al., 2019). Since any future biological modeling of
tree roots can be added retrospectively into our model,
we decided to focus on modeling the mechanical re-
actions of roots, and we modified the above-ground
tree growth to create a tentative model for the roots
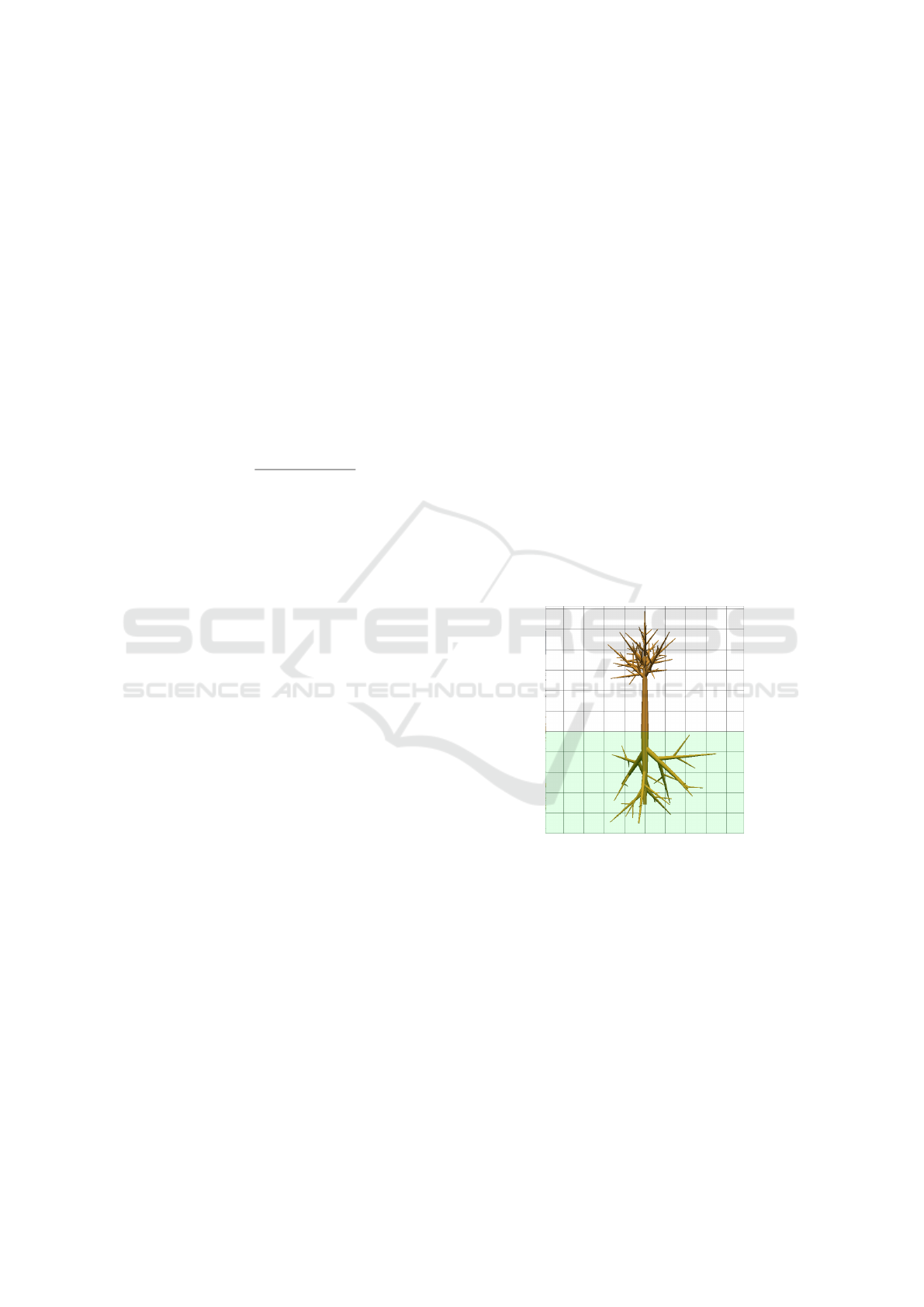
(Figure 3).
Figure 3: Tree model with roots, without mechanical forces.
To add soil resistance, we tested two models based
on (Pang et al., 2023) and (Imhoff et al., 2016). For
quantitative data on the soil (such as clay content or
organic matter content), we referred to (Rezaur et al.,
2003). Since the nodes underground are almost com-
pletely surrounded by the soil, we consider that the
roots can counter a net force in every direction. The
soil resistance calculated is considered to be the max-
imum soil resistance for the node.
The first method uses Equation 12 (Pang et al.,
2023) and bulk density values from (Rezaur et al.,
2003). The poisson’s ratios used were estimated
based on the water content. γ is the soil density, µ
ML-Tree and MRL-Tree: Combining Mass-Spring System, Rigid-Body Dynamics and L-Systems to Model Physical Effects on Trees
223
is Poisson’s ratio, P
a
is the reaming pressure, r is the
radius of the cone and h is the penetration depth.
B = (
γ
1000
)
12
× (0.5 − µ)
1
5
/2.8
|F
max
| = (
P
a
10000
×
γ×9.8
1000000
×
2
3
π × r
3
)
1
2
× h × 100 × B
(12)
The second method uses Equation 14 from
(Imhoff et al., 2016) and soil data values from (Rezaur
et al., 2003). SR is the soil resistance to penetration
in MPa. clay represents the percentage clay content
while OM represents the percentage organic matter
content. θ is the volumetric water content, BD is the
bulk density of soil and A is the surface area. The co-
efficients c
0
, c
1
, c
2
, d
0
, d
1
and e
0
are given in (Imhoff
et al., 2016).
lnSR =c
0
+ c
1
clay + c
2
OM
+ (d
0
+ d
1
clay) ln θ + e
0
lnBD
(13)
|F
max
| = 1000000 × SR × A (14)
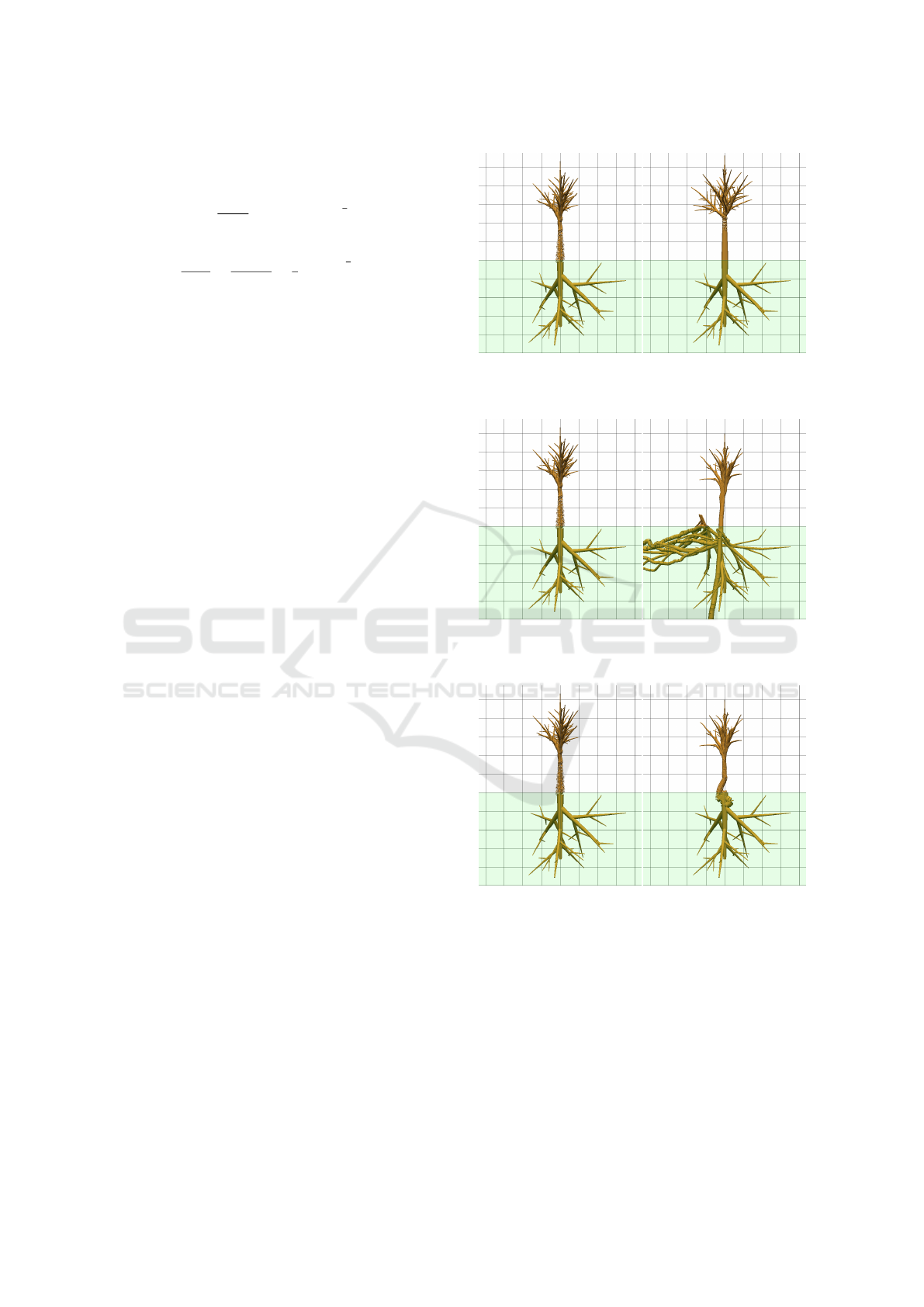
Figures 4, 5 and 6 show both methods using soil
data from three different locations (Yishun, Mandai
and NTU) in Singapore, with only gravity applied.
We notice some instability in almost all the cases,
which could be due to a number of reasons. Firstly,
our model is not an accurate representation of root
structure as discussed above. Secondly, it does not
consider soil penetration during root growth, includ-
ing any changes to the root model and soil profile as a
result. Furthermore, our model also does not include
collision detection as this would be too computation-
ally costly.
Overall, we consider the second method to be
more suitable. This is because it allows direct alter-
ation in the soil type since the percentages of clay,
water, bulk density, organic matter are all considered.
We also notice that for the Yishun tree models, the
second method is mostly stable, unlike for the first
method. Both models are unstable for the Mandai and
NTU models.
3.5 Stress Prediction and Automatic
Branch-Breaking
Given that our ML-Tree model keeps track of forces
and nodal information, we can calculate and predict
the stress on each node. This is shown in Figure
7. The colour varies on a logarithmic scale; darker
blue indicates more stress and the lightest blue ap-
pears nearly white.
(a) Method 1. (b) Method 2.
Figure 4: Comparison using Yishun’s environment.
(a) Method 1. (b) Method 2.
Figure 5: Comparison using Mandai’s environment.
.
(a) Method 1. (b) Method 2.
Figure 6: Comparison using NTU’s environment.
Based on the stress, we can also set an automatic
branch breaking limit. This can help improve our
digital twin tree model accuracy by automatically re-
moving branches experiencing a high level of stress,
which would have naturally fallen.
From Figure 7, the areas under most stress (e.g.
when the branches curve downwards significantly),
are darkly coloured as expected. However, from Fig-
ure 7, the sudden changes in colour of neighbouring
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
224
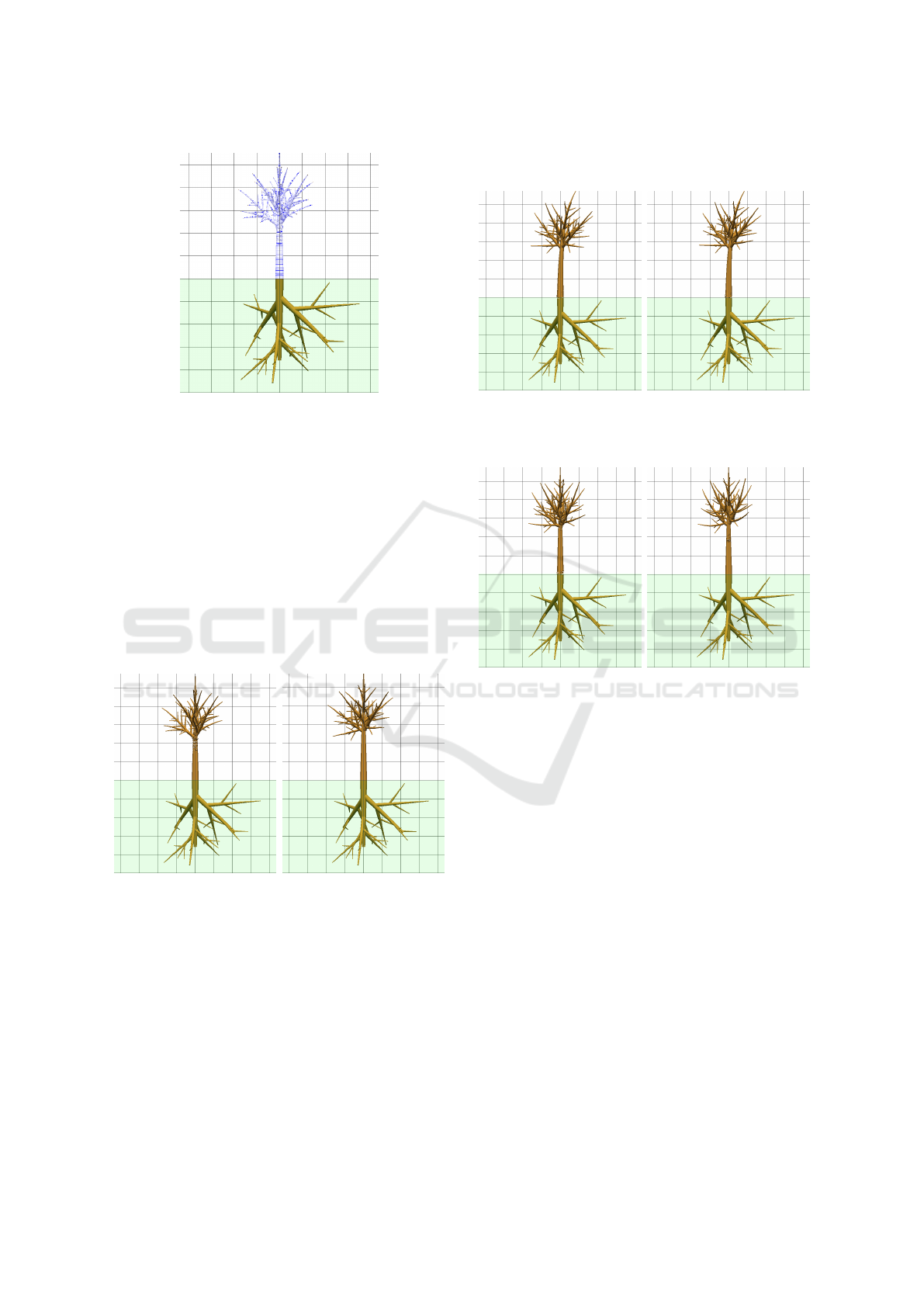
Figure 7: Tree model coloured based on stress.
internodes suggests that our models have difficulty
reaching a final equilibrium state.
4 RESULTS AND DISCUSSION
In this section, we compared the two models. Our ex-
amples were generated based on a 25 year-old Hopea
odorata tree. The age when nodes become rigid was
set to 3 years for the MRL-Tree model.
4.1 Gravity
(a) ML-Tree. (b) MRL-Tree.
Figure 8: Comparison of gravity effects on the two models.
We noticed from Figure 8 that MRL-Tree model was
significantly more rigid than our ML-Tree model.
4.2 Tropisms
Figure 9 shows a comparison of the two models with
phototropism applied, and the trees can be seen bend-
ing towards the light source on the right. Figure 10
has gravitropism applied, and the tree branches are
seen bending upwards as expected. We noticed that
the two models produced essentially identical results
in both cases.
(a) ML-Tree. (b) MRL-Tree.
Figure 9: Comparison of phototropism effects on the two
models.
(a) ML-Tree. (b) MRL-Tree.
Figure 10: Comparison of gravitropism effects on the two
models.
4.3 Wind
We also tested adding wind to our model, as shown in
Figure 11. However, for our ML-Tree model, the elas-
ticity and difficulty in propagation of forces causes
our tree to collapse. Since we did not implement the
tree collapse processes, Figure 11a appears unstable.
This is not the case in our MRL-Tree model, which
compels the forces to be completely propagated.
4.4 Comparison of the Two Models
From the model with wind applied (Figure 11), we
see that the soil resistance has difficulty keeping the
ML-Tree upright, causing the instability. This is be-
cause the ML-Tree model has difficulty propagating
the forces throughout the system within its 50 sub-
steps per L-System time-step, resulting in the model
appearing to be too elastic. Meanwhile the MRL-Tree
calculates the displacement effects for the whole RB
system together, compelling the forces to be propa-
ML-Tree and MRL-Tree: Combining Mass-Spring System, Rigid-Body Dynamics and L-Systems to Model Physical Effects on Trees
225

(a) ML-Tree (unstable). (b) MRL-Tree.
Figure 11: Comparison of wind effects on the two models.
gated, and therefore it is more stable and realistic.
However, this second model also faces stiffness
issues as seen from the case with gravity (Figure 8).
Furthermore, stress prediction and automatic branch
breaking, as they are currently implemented, will not
work with this second model since the RB nodes are
not considered individually.
5 CONCLUSION
We have demonstrated the feasibility of applying
physically-based methods to biological tree models
to attain two plausible models which can predict cru-
cial tree management information such as the relative
amounts of stress acting on each node. Our mod-
els can be scaled to include other environmental and
growth factors or to improve the current methods, as
long as these factors can be modelled as forces. We
also tested and compared varying methods of model-
ing soil resistance, of implicit integration and of pre-
dicting branch breaking possibility. In addition, we
also detailed the methods we used to handle bound-
ary conditions for both the ML-Tree model and the
MRL-Tree model. Our models are largely built us-
ing existing real-life data and physical laws of nature,
therefore they have the potential to be deployed for
tree management, with integration with a large-scale
tree-management system in a digital twin city.
However, our models currently suffer from stabil-
ity issues. Furthermore, for the total duration of sub-
steps and age timesteps to be equal, the substeps of
the MSS will need be very large, or the model will be
very computationally costly. More work can be done
to further improve stability and accuracy or create a
more accurate model to replace the tentative mod-
els currently used for roots. Other methods for solv-
ing ordinary differential equations can be explored to
improve stability. The models can also benefit from
modeling more physical aspects to improve accuracy,
such as incorporating a collision detection system be-
tween the nodes of the model. For further model vali-
dation, a parameter fitting method such as the method
detailed in (Gobeawan et al., 2021b) can be applied.
Beyond the context of plant modeling, we note
that our work in combining L-Systems, MSS and
RBD could also have applications in modeling other
objects such as bones and soft tissues (Golec, 2018),
medical procedures (Nakao and Minato, 2010) and
sound (Cahill, 2009).
ACKNOWLEDGEMENTS
This research/project is supported by the National
Research Foundation, Singapore under its Industry
Alignment Fund – Pre-positioning (IAF-PP) Funding
Initiative. Any opinions, findings and conclusions or
recommendations expressed in this material are those
of the authors and do not reflect the views of National
Research Foundation, Singapore.
REFERENCES
Alani, A. M. and Lantini, L. (2020). Recent advances in tree
root mapping and assessment using non-destructive
testing methods: a focus on ground penetrating radar.
Surveys in Geophysics, 41:605–646.
Atkinson, J. A., Pound, M. P., Bennett, M. J., and Wells,
D. M. (2019). Uncovering the hidden half of plants us-
ing new advances in root phenotyping. Current opin-
ion in biotechnology, 55:1–8.
Ballouch, Z., Hajji, R., Poux, F., Kharroubi, A., and Billen,
R. (2022). A prior level fusion approach for the se-
mantic segmentation of 3d point clouds using deep
learning. Remote Sensing, 14(14):3415.
Baraff, D. (2001). Physically based modeling: Rigid body
simulation. SIGGRAPH Course Notes, ACM SIG-
GRAPH, 2(1):2–1.
Betsch, P. and Siebert, R. (2009). Rigid body dynamics
in terms of quaternions: Hamiltonian formulation and
conserving numerical integration. International jour-
nal for numerical methods in engineering, 79(4):444–
473.
Boudon, F., Pradal, C., Cokelaer, T., Prusinkiewicz, P.,
and Godin, C. (2012). L-py: an l-system simulation
framework for modeling plant architecture develop-
ment based on a dynamic language. Frontiers in plant
science, 3:76.
Cahill, B. (2009). Physically based sound synthesis for in-
teractive applications. Master’s thesis, University of
Dublin, Trinity College.
Dumais, J. (2013). Beyond the sine law of plant gravit-
ropism. Proceedings of the National Academy of Sci-
ences, 110(2):391–392.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
226

Gobeawan, L., Lin, E., Tandon, A., Yee, A., Khoo, V., Teo,
S., Yi, S., Lim, C., Wong, S., Wise, D., et al. (2018).
Modeling trees for virtual singapore: From data acqui-
sition to citygml models. The International Archives
of the Photogrammetry, Remote Sensing and Spatial
Information Sciences, 42:55–62.
Gobeawan, L., Lin, S., Liu, X., Wong, S., Lim, C., Gaw, Y.,
Wong, N., Tan, P., Tan, C., and He, Y. (2021a). Ifc-
centric vegetation modelling for bim. ISPRS Annals
of the Photogrammetry, Remote Sensing and Spatial
Information Sciences, 8:91–98.
Gobeawan, L., Wise, D. J., Wong, S. T., Yee, A. T., Lim,
C. W., and Su, Y. (2021b). Tree species modelling
for digital twin cities. Transactions on Computational
Science XXXVIII, pages 17–35.
Golec, K. (2018). Hybrid 3D mass spring system for soft
tissue simulation. PhD thesis, Universit
´
e de Lyon.
H
¨
adrich, T., Benes, B., Deussen, O., and Pirk, S. (2017).
Interactive modeling and authoring of climbing plants.
In Computer Graphics Forum, volume 36, pages 49–
61. Wiley Online Library.
Harahap, N., Siregar, I., and Dwiyanti, F. (2018). Root
architecture and its relation with the growth char-
acteristics of three planted shorea species (diptero-
carpaceae). In IOP Conference Series: Earth and En-
vironmental Science, volume 203, page 012016. IOP
Publishing.
Imhoff, S., Pires da Silva, A., Ghiberto, P. J., Tormena,
C. A., Pilatti, M. A., and Libardi, P. L. (2016).
Physical quality indicators and mechanical behav-
ior of agricultural soils of argentina. PLoS One,
11(4):e0153827.
Jirasek, C., Prusinkiewicz, P., and Moulia, B. (2000). Inte-
grating biomechanics into developmental plant mod-
els expressed using l-systems. Plant biomechanics,
pages 615–624.
Kang, Y.-M., Choi, J.-H., Cho, H.-G., and Lee, D.-H.
(2001). An efficient animation of wrinkled cloth with
approximate implicit integration. The Visual Com-
puter, 17:147–157.
Kang, Y.-M., Choi, J.-H., Cho, H.-G., and Park, C.-J.
(2000). Fast and stable animation of cloth with an
approximated implicit method. In Proceedings Com-
puter Graphics International 2000, pages 247–255.
IEEE.
Lim, S. M. and Gobeawan, L. (2023). Hybrid mass-spring
l-system for modelling tree interactions with envi-
ronment. In Chen, T.-W. C., Fricke, A., Kahlen,
K., and St
¨
utzel, H., editors, Book of Abstracts of
the 10th International Conference on Functional-
Structural Plant Models: FSPM2023, 27- 31 March
2023, pages 102–103.
Mesit, J., Guha, R. K., and Chaudhry, S. (2007). 3d soft
body simulation using mass-spring system with inter-
nal pressure force and simplified implicit integration.
J. Comput., 2(8):34–43.
Moulton, D. E., Oliveri, H., and Goriely, A. (2020). Mul-
tiscale integration of environmental stimuli in plant
tropism produces complex behaviors. Proceedings of
the National Academy of Sciences, 117(51):32226–
32237.
Nakao, M. and Minato, K. (2010). Physics-based inter-
active volume manipulation for sharing surgical pro-
cess. IEEE Transactions on Information Technology
in Biomedicine, 14(3):809–816.
Pang, J., Lin, X., Zhang, X., Ji, J., and Geng, L. (2023).
Modelling and analysis of penetration resistance of
probes in cultivated soils. PloS one, 18(1):e0280525.
Pedersen, S. W. (2003). Simulation of rigid body dynamics.
Master’s thesis.
Pomeroy, J. (2023). Hardware, Software, Heartware: Dig-
ital Twinning for More Sustainable Built Environ-
ments. Taylor & Francis.
Prusinkiewicz, P. and Lindenmayer, A. (1990). The Algo-
rithm Beauty of Plants. Springer.
Rezaur, R., Rahardjo, H., Leong, E., and Lee, T. (2003).
Hydrologic behavior of residual soil slopes in singa-
pore. Journal of Hydrologic Engineering, 8(3):133–
144.
Russell, D. and Hunt, L. (2009). Spring constants
for hockey sticks. The Physics Teacher (sub-
mitted draft). Retrieved from: www. acs. psu.
edu/drussell/publications/russell-hunt-tpt-formatted.
pdf (Accessed 17 January 2014).
Smith, J. O. (2010). Physical audio signal processing: For
virtual musical instruments and audio effects. W3K
Publishing.
Stava, O., Pirk, S., Kratt, J., Chen, B., M
ˇ
ech, R., Deussen,
O., and Benes, B. (2014). Inverse procedural mod-
elling of trees. In Computer Graphics Forum, vol-
ume 33, pages 118–131. Wiley Online Library.
Suzuki, T. and Arikawa, T. (2010). Numerical analysis of
bulk drag coefficient in dense vegetation by immersed
boundary method. In Proc. of the 32nd Conference on
Coastal Engineering.
Tao, F., Xiao, B., Qi, Q., Cheng, J., and Ji, P. (2022). Digital
twin modeling. Journal of Manufacturing Systems,
64:372–389.
Van Haevre, W., Di Fiore, F., and Van Reeth, F. (2006).
Physically-based driven tree animations. In NPH,
pages 75–82.
Witkin, A., Baraff, D., and Kass, M. (2001). Physically
based modeling. ACM SIGGRAPH Course Notes, 25.
Wong, N. H., Tan, C. L., Kolokotsa, D. D., and Takebayashi,
H. (2021). Greenery as a mitigation and adaptation
strategy to urban heat. Nature Reviews Earth & Envi-
ronment, 2(3):166–181.
Yi, L., Li, H., Guo, J., Deussen, O., and Zhang, X. (2018).
Tree growth modelling constrained by growth equa-
tions. In Computer Graphics Forum, volume 37,
pages 239–253. Wiley Online Library.
Zhou, Y., Wang, Y., Chen, X., Zhang, L., and Wu, K.
(2017). A novel path planning algorithm based on
plant growth mechanism. Soft Computing, 21:435–
445.
ML-Tree and MRL-Tree: Combining Mass-Spring System, Rigid-Body Dynamics and L-Systems to Model Physical Effects on Trees
227
