
Improvement of Tensor Representation Label in Image Recognition:
Evaluation on Selection, Complexity and Size
Shinji Niihara
1,2
and Minoru Mori
1
1
Faculty of Information Technology, Kanagawa Institute of Technology, Atsugi-shi, Kanagawa, Japan
2
SHARP Corporation, Sakai-shi, Osaka, Japan
Keywords: Deep Neural Network, Image Recognition, Label, Tensor Representation, Adversarial Examples.
Abstract: One-hot vectors representing correct/incorrect answer classes as {1/0} are usually used as labels for
classification problems in Deep Neural Networks. On the other hand, a method using a tensor consisting of
speech spectrograms of class names as labels has been proposed and reported to improve resistance to
Adversarial Examples. However, effective representations for tensor-based labels have not been sufficiently
studied. In this paper, we evaluate the effects of selections of image, complexity, and tensor size expansion
on the tensor representation labels. Evaluation experiments using several databases and DNN models show
that higher accuracies and tolerances can be achieved by improving tensor representations.
1 INTRODUCTION
Since high recognition accuracies in the image
recognition were achieved on AlexNet (Krizhevsky,
2012), Deep Neural Networks (DNNs) have been
used not only for image recognition but also for
understanding various media. When used for
classification problems, a one-hot vector is usually
used as a class label for each data with the correct
answer class set to 1 and the incorrect answer class
set to 0. In recent years, several methods of making
various improvements of the one-hot vector have
been proposed for generalizing DNNs. Label
smoothing (Szegedy, 2016), in which labels are
smoothed with a small amount of noise, has been
reported to improve recognition accuracies. Also,
Knowledge Distillation (Hinton, 2015) generalizes a
small DNN by using the output of a larger DNN as
the correct label. Knowledge Distillation can be
positioned as a kind of label smoothing from a
viewpoint of adjustment of the one-hot vector.
On the other hand, a different approach has been
proposed in (Chen, 2021). Their method trains the
output of a DNN to be close to image labels of each
class from images by setting 2D images consisting of
the speech spectrogram of each class name. In the
labelling of tensors consisting of these images,
recognition accuracies for ordinary images are
comparable to that using one-hot vectors, but the
improvement of robustness to Adversarial Examples
(AEs) has been reported (Szegedy, 14). However,
little sufficient understanding and evaluation of
properties of tensor representation labels exist. In this
paper, we extend the tensor representation of labels.
Specifically, we propose and evaluate extensions to
image selection as a base of tensor, its value range, its
complexity, and sizes of tensors.
2 RELATED WORKS
In this section we describe conventional methods
about the improvement on label representation in
DNNs.
2.1 Label Smoothing
Label smoothing (Szegedy, 2016) is a smoothing
technique that adds a small amount of noise to 0 of
incorrect classes in the one-hot vector. Specifically,
subtracting a small value of ε from 1 in the correct
class, and distributing a value obtained by dividing ε
by the number of classes to all the classes. This allows
smoothing the output of the softmax function used as
the loss function and the regularization effect on the
weight parameters (Lukasik, 2020). Therefore,
overfitting tends to be suppressed and generalization
performance is often improved.
232
Niihara, S. and Mori, M.
Improvement of Tensor Representation Label in Image Recognition: Evaluation on Selection, Complexity and Size.
DOI: 10.5220/0012313700003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 232-239
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
Hinton et al. have proposed Knowledge
Distillation (Hinton, 2015), which improves the
generalization performance of small DNN models. In
this technique, a small DNN model adjusts weight
parameters using not errors between predictions of
the small DNN model and one-hot vectors of the
correct labels, but errors between predictions of the
small DNN model and that of large and high-
performance trained DNN models during the training
process. Here, treating the predictions of the large-
scale model as labels for the training data can be
regarded as a kind of label smoothing techniques.
2.2 Tensor Representation
On the other hand, as a completely different
approach, a tensor as a 2-dimensional image based on
a speech spectrogram of each class label name is set
as the class label (Chen, 2021). The distance between
the tensor-based output of a DNN model and a tensor
as the 2-dimensional image of the correct label is used
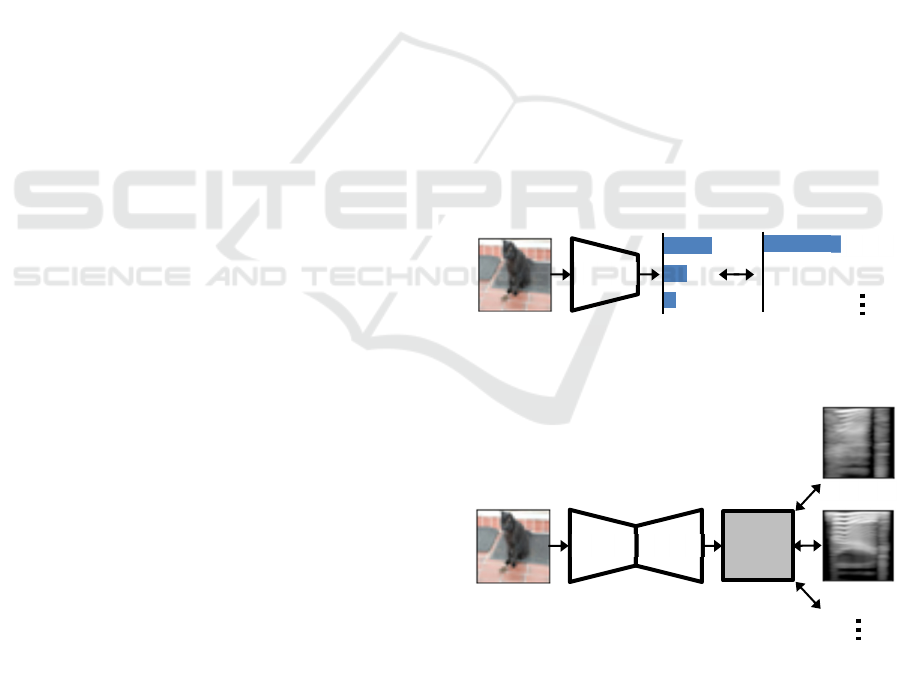
for learning and inference. Figure 1 shows overviews
of a conventional process using a one-hot vector label
and their process using a tensor label based on a
speech spectrogram. In the process of (Chen, 2021),
a DNN model generates and outputs a tensor
consisting of a 2-dimensional vector obtained by the
deconvolution from the feature vector after the
convolution process. Their evaluation experiments
have confirmed that the recognition accuracy for
ordinary images is not so different from that obtained
using the one-hot vector, but the tolerance against
AEs (Goodfellow, 2015, Kurakin, 2017) is improved.
They also have reported that the increase of the
complexity of the speech spectrogram caused by
randomly switching the spectrogram among
frequencies, improves recognition accuracies.
3 PROPOSED METHOD
3.1 Our Approach
(Chen, 2021) mainly used a tensor consisting a two-
dimensional vector based on the speech spectrogram
for each class label. However, the validity of the
speech spectrograms mentioned above as a class label
has not been verified in any way. Several topics such
as a kind of image used, complexity, size of tensor,
and value range are also not sufficiently validated.
In this paper we seek to improve the tensor
representation label consisting a multidimensional
vector like an image from several perspectives. First,
we consider a selection of an image as a reference.
One is to select an image from training data itself and
the other uses a mean image obtained by averaging
training data for each class. As for the complexity of
the images, we add gaussian noise to reference
images and apply block ciphers to each reference
image. We also examine the expansion of the tensor
size and the number of channels to 3 channels (RGB).
Details of our proposed approach are described
below.
3.2 Tensor Representation Label
3.2.1 Image Selection
First, we consider the use of an image sampled from
the training data as a reference image to be set as a
label. If the output of the DNN is positioned as an
image reconstruction problem, sampling an image
from the training data and setting it a reference seem
to be reasonable. In this paper, we set labels as images
sampled from the training data for each class or the
averaged image of each class from the training data.
Figure 2 shows sampled images as tensor
representation labels from CIFAR10 (Krizhevsky,
2009), and examples of labels based on the mean
image for each class (each label of images is
“airplane”, “automobile”, “bird”, “cat”, and “deer”
from left to right in Figure 2, 3, 4 and 5).
(a) One-hot vector representation
(b) Tensor representation
Figure 1: Overviews of inference process using label of
one-hot vector and tensor representation labels.
Conv
DNNInput Output
Cat
Bir
d
One-hot vector
Label
Out
p
ut
Conv Deconv
DNN
Bir
d
Cat
In
p
ut
Tensor Label
Improvement of Tensor Representation Label in Image Recognition: Evaluation on Selection, Complexity and Size
233
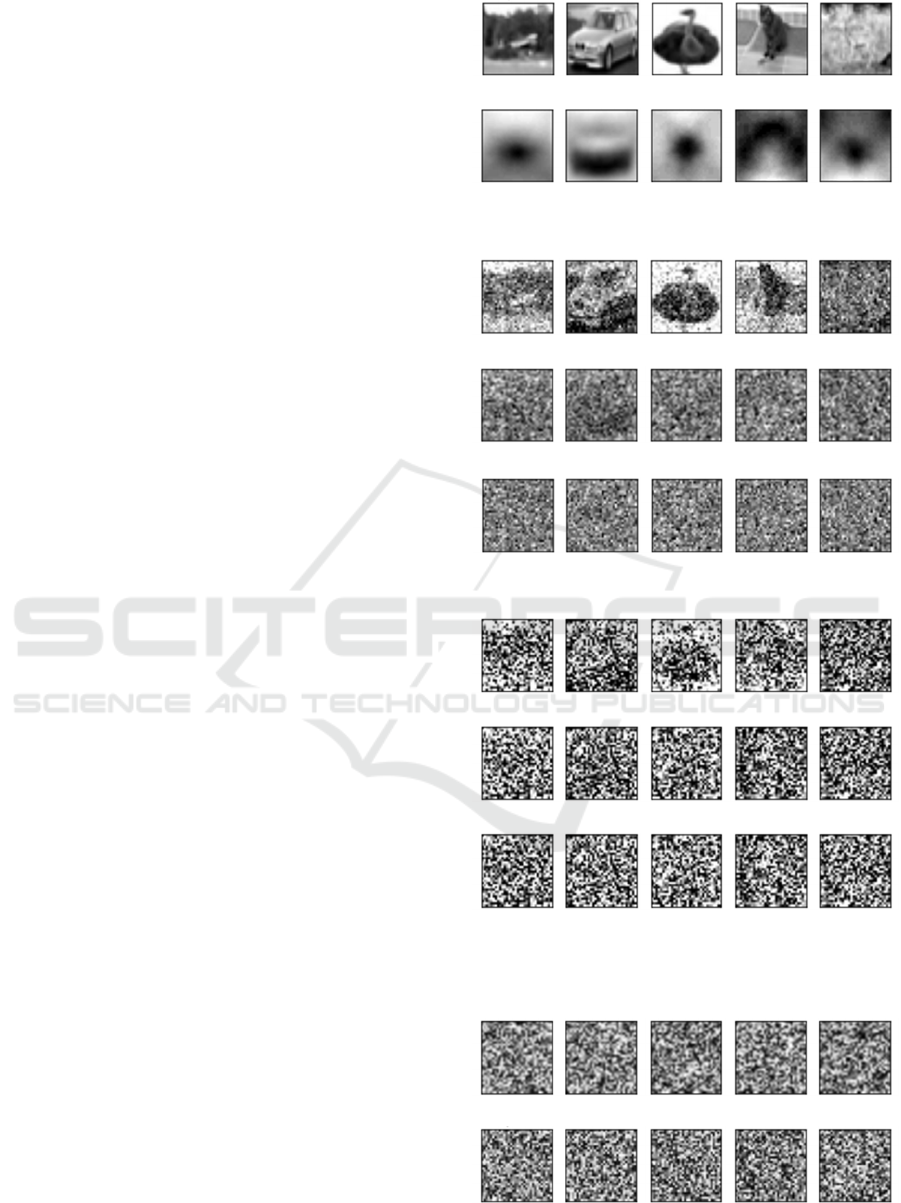
3.2.2 Image Complexity
Next, we examine the complexity of images used as
tensor representation labels, since the study in (Chen,
2021) suggests that the entropy of images may affect
classification accuracies. In this paper, we adopted
two ways of increasing image complexity. One is the
addition of noise and the other is block ciphers as a
kind of data encryption methods.
In the case of adding noise, we used the image
shown in 3.2.1 as refences and applied Gaussian noise
only once and iteratively 20 times to each image. We
also exploited noise itself as a label. Figure 3 shows
examples of noise-added image and noise itself as
tensor labels. In examples of Figure 3 (a), we can see
original images under noise but cannot see original
shapes after iterative noise addition in Figure 3 (b).
To increase the image complexity using the block
cipher, we applied CBC mode (Ehrsam, 1976), that is
one of widely used block ciphers, to each image.
Figure 4 shows images after applying CBC to
sampled and averaged images. These examples well
show unique complexities on each class.
3.2.3 Size and Channel of Images
In (Chen, 2021), the size of each tensor label was 64
pixels square. Therefore, in this paper, we set the size
of each 2-dimensional (single channel) tensor
described in 3.2.2 to same 64 pixels square. In this
section we validate effects of other tensor size and
number of channels. First, as a viewpoint from the
increase of the tensor size, we convert the image to 3
channels of RGB while keeping the image resolution
at the same size. The tensor size is therefore tripled
than that with a single channel. Furthermore, as
another approach, the resolution is increased while
keeping the single channel. To compare with the 3-
channel conversion described above, we use an image
whose height and width are about 1.7 times larger, so
that the tensor size is three times larger as same as
RGB 3-channeled images. Figure 5 shows RGB 3-
channeled images (before grayscaling original
training images) shown in Figure 2.
3.2.4 Value Range
Furthermore, we examine the effect of a value range
of images as tensor representation labels. We
examine the following three different types of value
ranges; The first type has the original (0 - 255) value
of each image. The second one has (-1 - 1) value by
shifting with -1 after dividing by 128. The last one has
values normalized by the mean and the variance of
the training data for each class.
Sampled images for each class
Averaged images for each class
Figure 2: Examples of sampled and averaged images.
Sampled images with noise
Averaged images with Gaussian noise
Gaussian noise
(a) Noisy label with gaussian noise.
Sampled images with iterative Gaussian noise
Averaged images with iterative Gaussian noise
Iterative Gaussian noise
(b) Noisy label with iterative Gaussian noise.
Figure 3: Examples of images with Gaussian noise.
Sampled images after applying block cipher
Averaged images after applying block cipher
Figure 4: Examples of images after applying block cipher.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
234
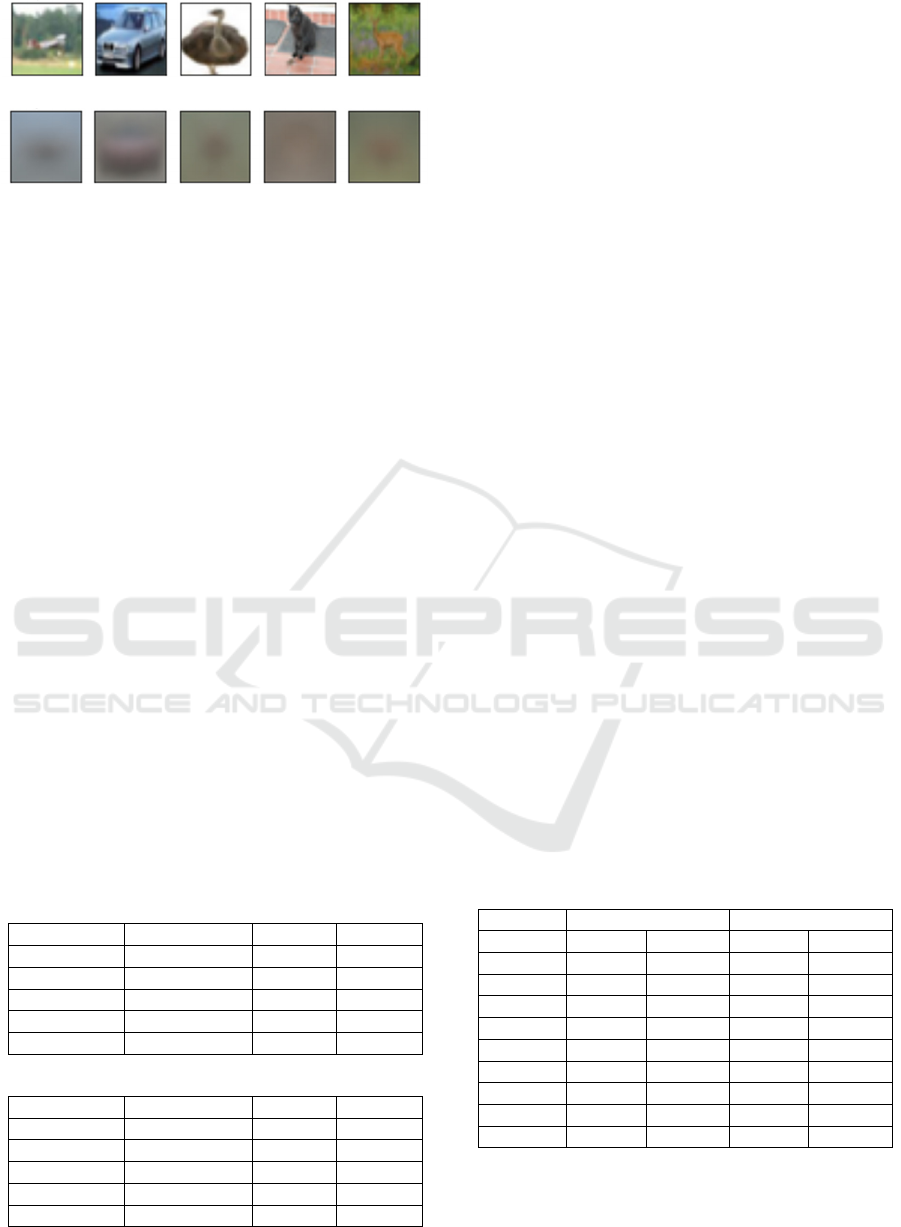
Sampled RGB images for each class
Averaged RGB images for each class
Figure 5: Examples of RGB (3-channel) image.
4 EVALUATION EXPERIMENTS
In this section we describe evaluation experiments for
validating and analysing the performance of our
proposed label representation.
4.1 Experimental Set-up
CIFAR10 and CIFAR100 (Krizhevsky, 2009) were
used for the experimental data. The training data
consists of 50,000 images (CIFAR10: 5,000 images /
class, CIFAR100: 500 images / class) and the test data
consisted of 10,000 images. Each sample was
normalized by a mean and a variance. Cropping and
horizontal flip were applied as data augmentation in
the training process. Smooth L1 loss was used as the
cost function as in (Chen, 2021). The number of
epochs was set to 300, and SGD with moment was
used as the optimizer. VGG19 (Simonyan, 2015) and
ResNet110 (He, 2016) were used as DNN models.
The architectures of the deconvolution process for
tensor representation labels are tabulated in Table 1.
Each experimental result is calculated as a median of
5 experimental results with different seed values.
Table 1: Architectures of deconvolution processes.
(a) 1 channel tensor.
In
p
ut Out
p
ut
K
ernel Stride
64 x 1 x 1 64 x 4 x 4 4 x 4 1 x 1
64 x 4 x 4 32 x 8 x 8 4 x 4 2 x 2
32 x 8 x 8 16 x 16 x 16 4 x 4 2 x 2
16 x 16 x 16 8 x 32 x 32 4 x 4 2 x 2
8 x 32 x 32 1 x 64 x 64 4 x 4 2 x 2
(b) 3-channel tensor.
In
p
ut Out
p
ut
K
ernel Stride
128 x 1 x 1 128 x 4 x 4 4 x 4 1 x 1
128 x 4 x 4 64 x 8 x 8 4 x 4 2 x 2
64 x 8 x 8 32 x 16 x 16 4 x 4 2 x 2
32 x 16 x 16 16 x 32 x 32 4 x 4 2 x 2
16 x 32 x 32 3 x 64 x 64 4 x 4 2 x 2
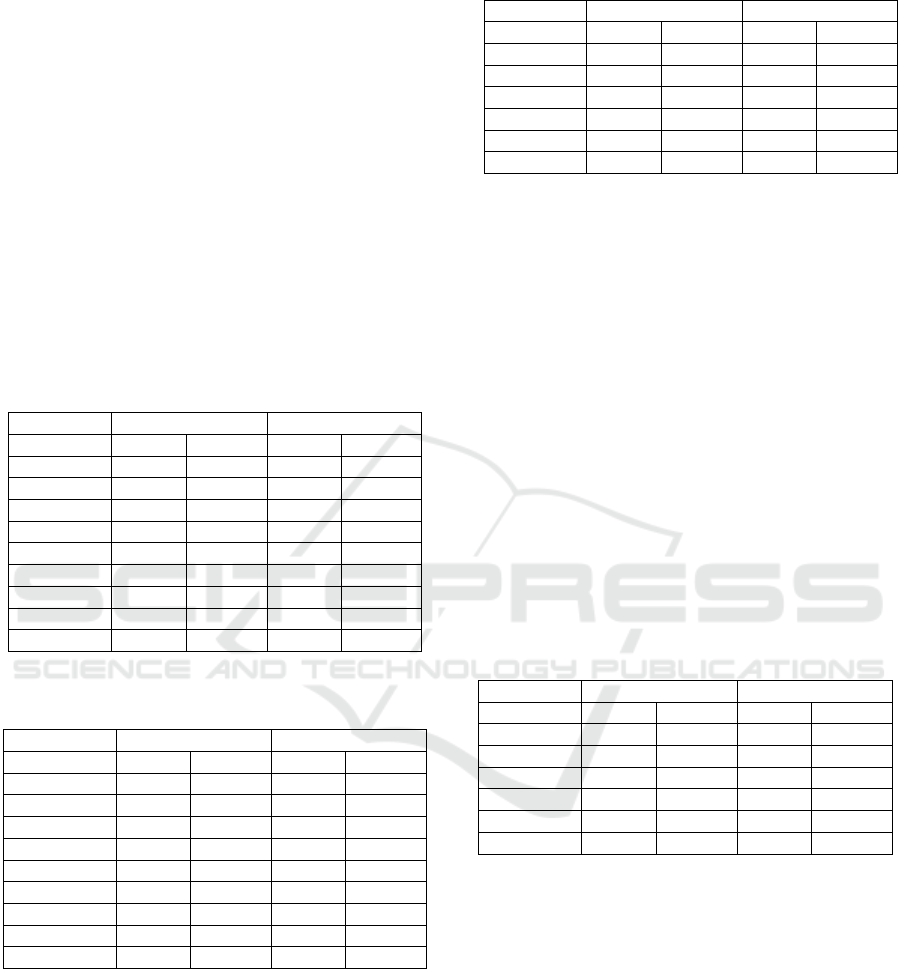
4.2 Experimental Results
4.2.1 Comparison Between Types of Labels
First, we compare the conventional one-hot vector
(Category), a speech spectrogram-based tensor label
(Speech), and a shuffled image of speech spectrum
(Shuffle) with our proposed labels consisting of
sampled grayscale images (Gray_s) and averaged
images of each class (Gray_a) from the training data.
Table 2 shows classification rates for each type of the
label representations. The subscripts (1-3) of the
labels based on the sampled and averaged images
mean as follows; The subscript of 1 means the
original image with a value range of 0 to 255. That of
2 expresses labels with -1 to 1 values by shifting and
dividing. That of 3 means the label values after the
normalization by the mean and the variance of the
training data. Table 2 shows that, when using sampled
image-based labels with normalized value ranges,
higher accuracies than the conventional spectrogram-
based labels were obtained on CIFAR10 and are
close to the accuracies given by the ordinary one-hot
vector label. These results provides that the
normalization on the value range seems to reduce
intra-class variation and emphasize diffrences
between classes. And generating a tensor with a value
range form 0 to 255 may be difficult in the
deconvolution based on the process using network
weights of 0 to 1. On the other hand, for CIFAR100,
the accuracies are conversely reduced. In particular,
when the averaged image-based labels of each class
were used, the accuracies were low under all
conditions. The reason for these results seems that the
averaged images are generally blurred as shown in
Figure 2, so this blurness maks it difficult to
distinguish between classes.
Table 2: Classification rates for each type of labels [%].
Label CIFAR10 CIFAR100
VGG ResNet VGG ResNet
Cate
g
or
y
93.27 94.01 72.19 72.82
S
p
eech 91.75 92.51 70.16 68.96
Shuffle 92.51 92.67 71.01 69.16
Gray_s1 91.08 92.24 66.64 66.86
Gray_s2 93.08 93.23 67.30 64.20
Gra
y_
s3 92.91 93.12 68.16 65.96
Gra
y_
a1 90.86 91.50 64.69 63.47
Gray_a2 91.69 90.71 59.08 50.67
Gray_a3 91.79 91.06 60.64 53.24
Next, we examine the effect of the complexity of
a tensor label. Table 3 shows results for labels applied
to sampled and averaged grayscale images with
additive noise (Noisy_Gs and Noisy_Ga) and labels
Improvement of Tensor Representation Label in Image Recognition: Evaluation on Selection, Complexity and Size
235
using noise itself (Noise_G). Table 4 shows results
using iterative addition of noise. Table 3 provides that
our tensor labels with additive noise provides higher
accuracies than one-hot vectors as well as
conventional spectrogram-based labels on the model
of VGG19. However, on the model of ResNet110, our
proposed labels were more accurate than the
spectrogram-based labels, but slightly less accurate
than the one-hot vectors. The matching between the
tensor representation and the ResNet structure is one
of subjects for future investigation. From Table 4,
more complexity derived from iterative noise
addition provides higher accuracies, but that was not
as much of an improvement as expected. And results
from both of Table 3 and 4 show that noise itself with
no class images can achieve good performances.
Table 3: Classification rates for labels with additive noise
and noise itself [%].
Label CIFAR10 CIFAR100
VGG ResNet VGG ResNet
Nois
y_
Gs1 91.48 92.17 68.27 67.32
Noisy_Gs2 93.33 93.71 69.64 66.98
Noisy_Gs3 93.27 93.49 70.05 67.73
Nois
y_
Ga1 91.98 92.36 68.71 67.26
Nois
y_
Ga2 93.73 93.75 71.62 67.54
Nois
y_
Ga3 93.67 93.70 71.52 67.78
Noise_G1 91.95 92.47 69.02 57.30
Noise_G2 93.65 93.60 71.85 67.08
Noise_G3 93.08 93.30 71.36 65.10
Table 4: Classification rates for iterative noise-added label
and iterative noise itself [%].
Label CIFAR10 CIFAR100
VGG ResNet VGG ResNet
Nois
y
2
_
Gs1 91.57 92.26 69.00 65.17
Nois
y
2
_
Gs2 93.70 93.79 71.67 69.11
Noisy2_Gs3 93.43 93.43 71.77 68.91
Noisy2_Ga1 91.45 92.25 69.43 61.62
Noisy2_Ga2 93.63 93.82 71.72 68.14
Nois
y
2
_
Ga3 93.57 93.75 71.86 68.01
Noise2
_
G1 91.27 92.26 69.63 69.93
Noise2
_
G2 93.68 93.73 71.76 68.00
Noise2_G3 92.61 92.76 71.45 64.31
Table 5 shows classification rates for encrypted
image-based tensors. (Crypt_Gs) means sampled
image after applying block cipher and (Crypt_Ga)
means averaged encrypted one. Table 5 shows that
more increase of complexity gives more accuracies as
in the case of labels based on images with additive
noise. Also averaged image-based label can obtain
similar accuracies to sampled image-based one. This
tendency is also similar to the case of additive noise.
Table 5: Classification rates for encrypted image [%].
Label CIFAR10 CIFAR100
VGG ResNet VGG ResNet
Cr
yp
t
_
Gs1 91.61 92.31 69.41 60.67
Crypt
_
Gs2 93.86 93.79 71.92 67.83
Crypt
_
Gs3 93.50 93.66 71.91 67.52
Crypt
_
Ga1 91.52 92.45 69.71 60.90
Cr
yp
t
_
Ga2 93.57 93.76 71.68 67.21
Cr
yp
t
_
Ga3 93.71 93.74 71.99 67.46
We also examine the effect of increasing the
tensor sizes and the number of channels. Table 6
shows the results of the channel enhancement, that is
a 3 channelled RGB image-based tensor while
keeping the image resolution (RGB64), and the
results of enlarging image size while keeping single
channel (Gray112). Both of them means tripling the
tensor size of original tensor labels. Comparison with
Table 2 shows that a little improvement on accuracy
was obtained by increasing the number of channels to
three (RGB64) for the same image size but this is not
to the extent expected from tripling the tensor size.
And there was also no effect when the image size
(resolution) was increased keeping a single channel.
The reason for these results is assumed that the
training data is 32 pixels square and this limits the
effect of increasing the tensor size. To validate the
effectiveness of increasing tensor size, further
evaluation using larger resolution images is needed.
Table 6: Accuracies for each enhanced tensor size [%].
Label CIFAR10 CIFAR100
VGG ResNet VGG ResNet
RGB64_s1 91.07 92.58 67.81 68.29
RGB64_s2 93.24 93.14 68.34 66.11
RGB64
_
s3 93.00 93.24 69.04 67.43
G112
_
s1 90.47 92.34 65.54 67.07
G112
_
s2 93.06 93.42 67.32 64.94
G112_s3 92.78 93.06 68.43 65.75
Finally, we evaluated the effectiveness of the
combination between the increase of tensor size and
the complexity. Table 7 shows classification rates of
RGB-based tensor label with additive noise or after
applying block cipher. (Rs) means a label based on a
sampled RGB image. From Table 7, our proposed
label clearly outperforms conventional tensor labels
and obtained almost same accuracies as the
conventional one-hot vector representation. On the
other hand, results using Resnet110 on CIFAR100 are,
unfortunately, lower than those obtained by the one-
hot vector on the same condition. As mentioned
above, the investigation of this tendency is one of
future works.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
236
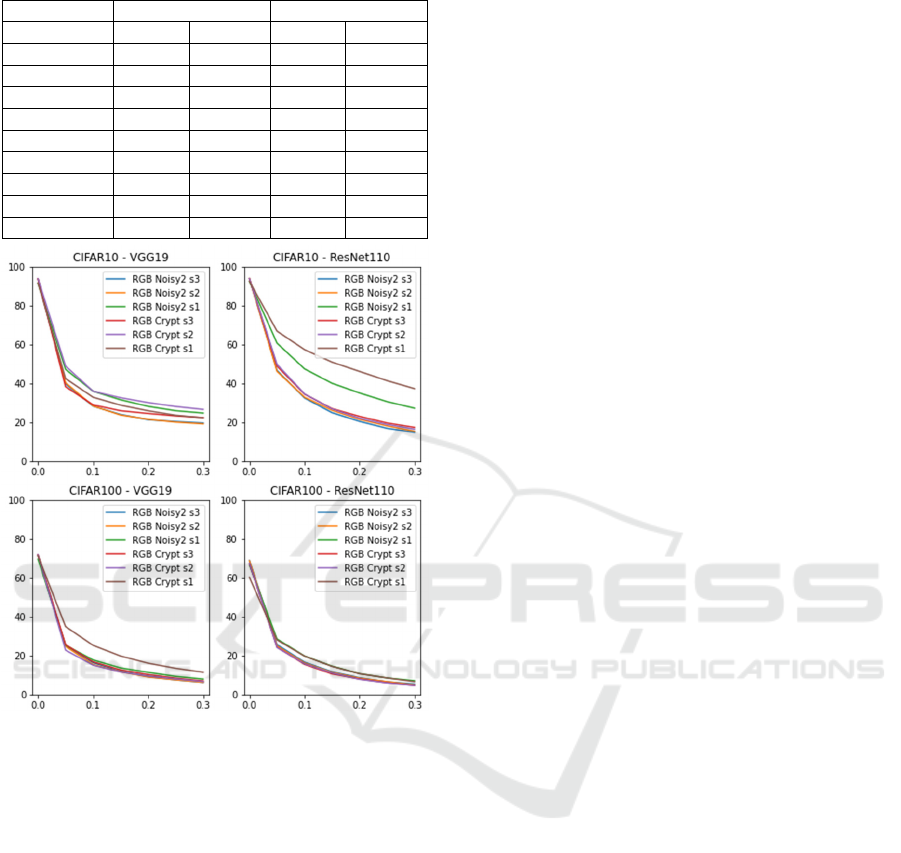
Table 7: Rates for noisy or encrypted RGB-based label [%].
Label CIFAR10 CIFAR100
VGG ResNet VGG ResNet
Nois
y
2
_
Rs1 91.45 92.39 69.54 66.46
Noisy2_Rs2 93.69 93.89 71.41 68.78
Noisy2_Rs3 93.58 93.80 71.37 68.86
Noise2_Rs1 91.18 92.12 70.82 61.43
Noise2
_
Rs2 93.63 93.94 72.20 67.76
Noise2
_
Rs3 93.45 93.77 72.09 66.86
Cr
yp
t
_
Rs1 91.53 92.43 71.23 60.21
Crypt_Rs2 93.73 93.86 71.80 67.37
Crypt_Rs3 93.65 93.83 71.85 67.22
Figure 6: Accuracies on with/without normalization against
the iterative method of AEs.
4.2.2 Robustness Against AEs
We evaluated the robustness of each label against
AEs generated by the method of FGSM (Goodfellow,
2015) and the Iterative method (Kurakin, 2017). And
we adopted cases with and without a mis-recognition
target class to each algorithm. First, to investigate
how the normalization on value ranges affects the
recognition of AEs, we see accuracies among three
types of value ranges on iterative noise added and
encrypted tensors on several dataset and DNN models
against iterative method without mis-recognition
target. The reason to select this AEs method is the
most difficult to recognize them correctly. Figure 6
shows accuracies mentioned above. The horizontal
axis of each graph represents the noise level at the
time of AEs creation. Please note that all the proposed
tensors are based on sampled images. Results shown
in Figure 6 show that accuracies of each tensor vary
with conditions. From these results, we deeply
validate tensors with an original value range (0 – 255:
s1) and a value range of (-1 – 1: s2) by normalization.
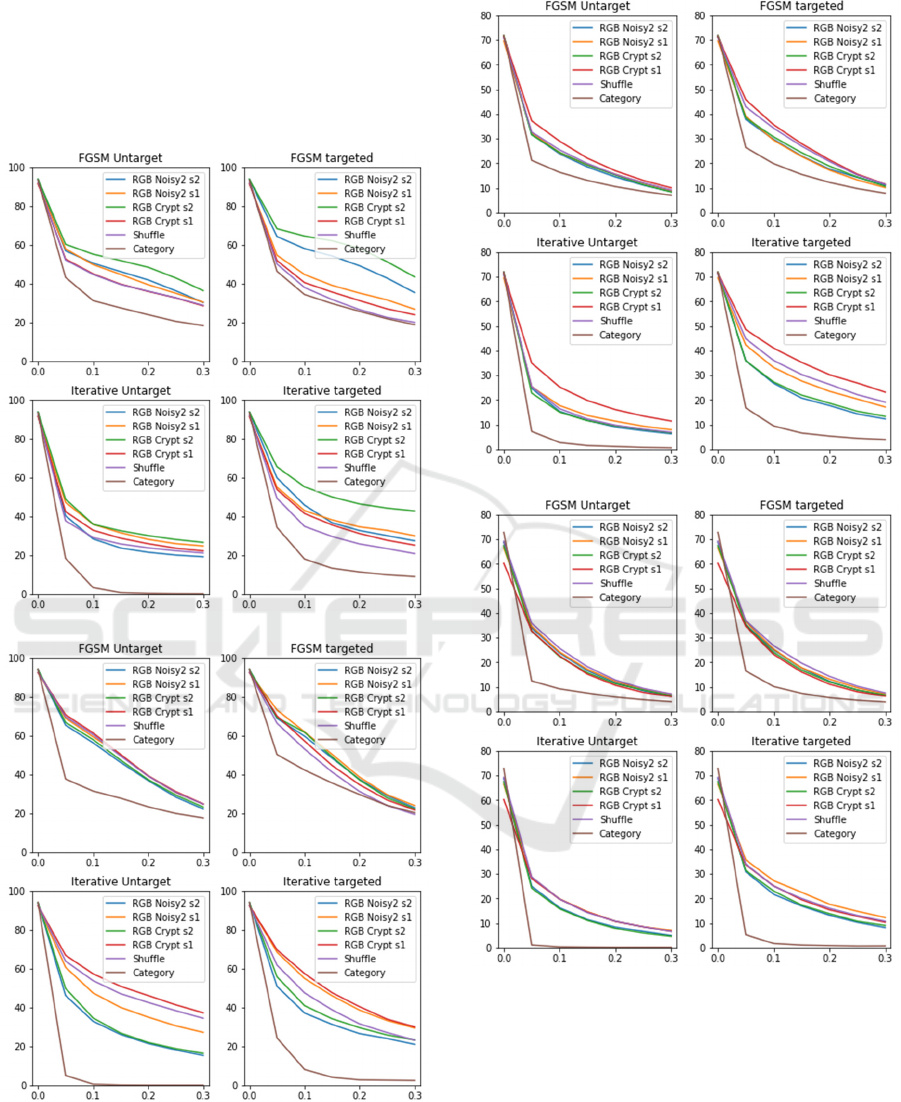
Next, we compare our proposed labels selected
above and existing labels using several datasets and
DNN models. Classification accuracies of each label
expression against AEs on CIFAR10 and CIFR100
are shown in Figure 7 and 8, respectively. Here we
use only the shuffled spectrogram-based label as the
conventional method because that are generally
superior to the basic spectrogram-based label. From
Figure 7 & 8, as evaluated in (Chen 2021), tensor
representations are more tolerant to AEs than the one-
hot vector representation, especially in the cases with
mis-recognition target. Compared to spectrogram-
based tensor representation, our proposed tensor label
often achieved higher accuracies. In particular,
among our proposed labels, post-cryptographic tensor
labels with high complexity, which were highly
accurate in 4.2.1, show higher tolerance in the cases
with mis-recognition target class. This seems to be
caused by high complexity and normalization pre-
process. On the other hand, our method did not differ
much from the conventional tensor representation
under the condition of the use of ResNet110 for
CIFAR100 similar to results in 4.2.1.
4.2.3 Impact of Number of Training Data
Finally, we validate the influence of sample number
in the training. Therefore, we examined classification
rates when the number of training data is reduced
from 20% to 1% of the standard 50,000 training data
on CIFAR10. Figure 9 shows accuracies among three
types of value ranges on iterative noise added and
encrypted tensors when using VGG19 and
ResNet110 as DNN models for validating the effect
of the normalization on value ranges. The horizontal
axis of each graph represents the percentage [%] of
the total training data actually used for training.
Please note that all of the proposed tensors are based
on sampled images. These results give that the
normalization pre-process does not always achieve
high accuracies. One of causes that tensors with
original value range of (0-255) obtained higher
accuracies seems that a wider value range can
enhance a more gap between different classes when
using limited training samples. On the other hand,
normalization process seems to narrow the
differences between classes, because a variety of
values of each dimension is smaller than that of an
ordinary tensor. Figure 10 shows the comparison
among our proposed label selected based on results in
Figure 9 and conventional labels. Figure 10 provides
Improvement of Tensor Representation Label in Image Recognition: Evaluation on Selection, Complexity and Size
237
that our tensor representations are better than the
existing tensor representation especially for less
training samples used on VGG19. when the number
of samples is large, each tensor representation label
has a similar performance but higher accuracies than
the conventional one-hot vector label.
(a) VGG19
(b) ResNet110
Figure 7: Classification rates for AEs on CIFAR10.
(a) VGG19
(b) ResNet110
Figure 8: Classification rates for AEs on CIFAR100.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
238
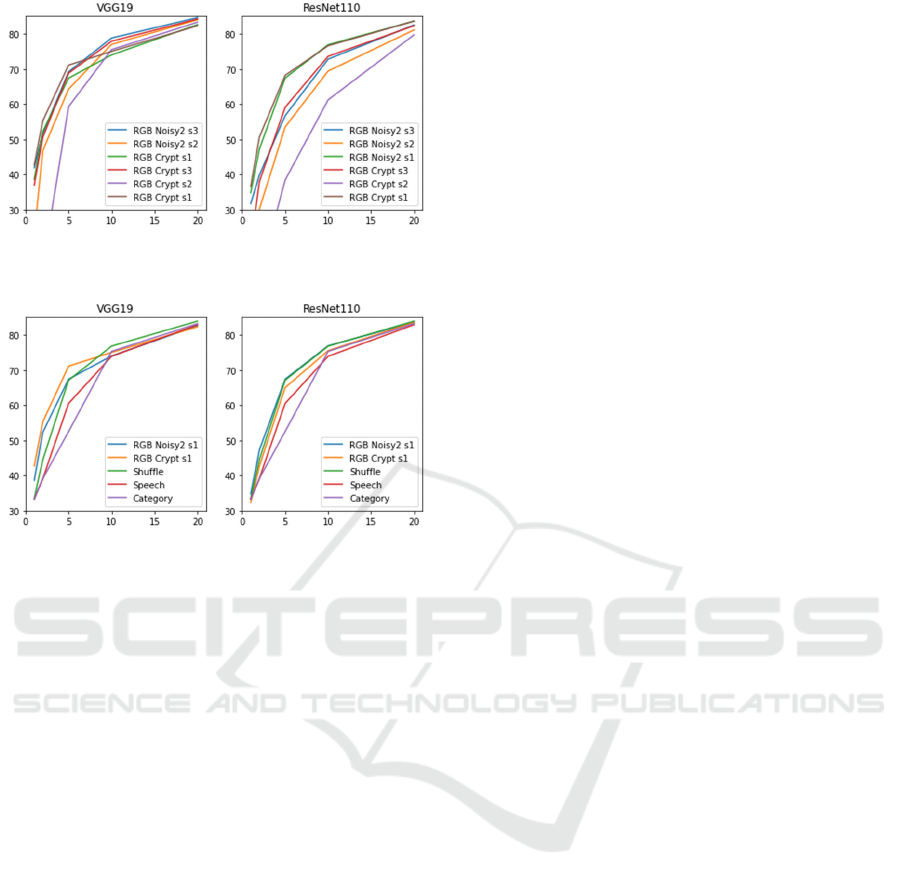
Figure 9: Classification rates among several value ranges of
tensors for each amount [%] of training data of CIFAR10.
Figure 10: Classification rates of several types of labels for
each amount [%] of training data of CIFAR10.
5 CONCLUSIONS
In this paper, we improved and evaluated the tensor
representation label proposed in (Chen, 2021) as a
different label representation in image recognition.
Specifically, improvements and evaluations were
conducted on image selection of a reference,
complexity increase, and tensor size setting. For the
reference image of the tensor representation, we
proposed sampling directly from the training data and
averaging procedures for each class. To increase
complexity, we proposed the addition of Gaussian
noise and the application of block encryption. We
also evaluated the expansion of the tensor size and the
number of channels. We also examined the varieties
of value range. In the recognition experiments
conducted for evaluating the proposed methods, our
proposed tensor representations with higher
complexity and larger sizes were as accurate as the
conventional one-hot vector for ordinary data and
more accurate than the conventional tensor
representation labels based on speech spectrograms.
In addition, in the evaluation of resistance to AEs and
experiments with reduced training data, we confirmed
that our proposed labels provide higher accuracy than
conventional labels, including one-hot vectors in
many cases. However, we unfortunately found that no
method was superior in all the cases, and that some
methods are not suitable for certain models and
datasets.
Future works include verification of the
compatibility between label types and the structure of
DNN models, and evaluation using other databases
and DNN models.
REFERENCES
Krizhevsky, A., Sutskever, I. Hinton, G. (2012). Imagenet
classification with deep convolutional neural networks.
In NIPS’12, 26th Conference on Neural Information
Processing Systems.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., Wojna, Z.
(2016). Rethinking the inception architecture for
computer vision. In CVPR’16, The IEEE/CVF
Conference on Computer Vision and Pattern
Recognition.
Hinton, G., Vinyals, O. Dean, J. (2015). Distilling the
knowledge in a neural network. In NIPS’12, 29th
Conference on Neural Information Processing Systems
Workshop.
Chen, B., Li, Y., Raghupathi, S., Lipson, H. (2021). Beyond
categorical label representations for image
classification. In ICLR’21, 9th International
Conference on Learning Representation.
Szegedy C., Zaremba, W., Sutskever, I., Bruna, J., Erhan,
D., Goodfellow, I., Fergus, R. (2014). Intriguing
properties of neural networks. In ICLR’14, 2th
International Conference on Learning Representation.
Lukasik, M., Bhojanapalli, S., Menon, A., Kumar, S.
(2020). Does label smoothing mitigate label noise? In
ICML’20, 37th International Conference on Machine
Learning.
Krizhevsky, A. (2009). Learning multiple layers of features
from tiny images.
Ehrsam, W., Meyer, C., Smith, J., Tuchman, W. (1976).
Message verification and transmission error detection
by block chaining. US Patent 4074066.
Simonyan, K., Zisserman, A. (2015). Very deep
convolutional networks for large-scale image
recognition. In ICLR’15, 3th International Conference
on Learning Representation.
He, K., Zhang, X., Ren, S., Sun, J. (2016). Deep residual
learning for image recognition. In CVPR’16, The
IEEE/CVF Conference on Computer Vision and
Pattern Recognition.
Goodfellow, I., Shlens, J., Szededy, C. (2015). Explaining
and harnessing adversarial examples. In ICLR’15, 3th
International Conference on Learning Representation.
Kurakin, A., Goodfellow, I., Bengio, S. (2017). Adversarial
examples in the physical world. In ICLR’15,
International Conference on Learning Representation
Workshop.
Improvement of Tensor Representation Label in Image Recognition: Evaluation on Selection, Complexity and Size
239
