
Solving Job Shop Problems with Neural Monte Carlo Tree Search
Marco Kemmerling
a
, Anas Abdelrazeq
b
and Robert H. Schmitt
c
Chair of Production Metrology and Quality Management & Institute for Information Management in Mechanical
Engineering (WZL-MQ/IMA), RWTH Aachen University, Aachen, Germany
Keywords:
Neural Monte Carlo Tree Search, Reinforcement Learning, AlphaZero, Job Shop Problem, Combinatorial
Optimization.
Abstract:
Job shop scheduling is a common NP-hard problem that finds many applications in manufacturing and beyond.
A variety of methods to solve job shop problems exist to address different requirements arising from individual
use cases. Recently, model-free reinforcement learning is increasingly receiving attention as a method to train
agents capable of scheduling. In contrast, model-based reinforcement learning is less well studied in job
scheduling. However, it may be able to improve upon its model-free counterpart by dynamically spending
additional planning budget to refine solutions according to the available scheduling time at any given moment.
Neural Monte Carlo tree search, a family of model-based algorithms including AlphaZero is especially suitable
for discrete problems such as the job shop problem. Our aim is to find suitable designs of neural Monte
Carlo tree search agents for the job shop problem by systematically varying certain parameters and design
components. We find that different choices for the evaluation phase of the tree search have the biggest impact
on performance and conclude that agents with a combination of node value initialization using learned value
functions and roll-out based evaluation lead to the most favorable performance.
1 INTRODUCTION
The job shop problem (JSP), like many other combi-
natorial optimization problems, is NP-hard, meaning
that no polynomial-time algorithms capable of com-
puting exact solutions are known. In practice, it is of-
ten preferable to apply efficient algorithms that find
reasonably good solutions, rather than spend large
amounts of computational budget to compute exact
optima.
In recent times, reinforcement learning has been
receiving increasing attention as a method to train
agents capable of solving JSPs (Zhang et al., 2020;
Samsonov et al., 2021). While some variation in
agent design and modeling of the problem exist, in
many cases, reinforcement learning is used to essen-
tially learn scheduling heuristics. While this requires
considerable training time, agents can compute solu-
tions at low computational cost after training and have
been demonstrated to outperform common schedul-
ing heuristics such as shortest processing time first
(SPT) and longest processing time first (LPT) (Sam-
a
https://orcid.org/0000-0003-0141-2050
b
https://orcid.org/0000-0002-8450-2889
c
https://orcid.org/0000-0002-0011-5962
sonov et al., 2021). A further potential benefit of re-
inforcement learning approaches is the ability to learn
tailor-made heuristics that exploit the characteristics
of specific use cases.
While exact methods are often not suitable in dy-
namic use cases with quickly changing circumstances
due to their high computational cost, the low compu-
tational cost of trained reinforcement learning agents
forms another extreme and may leave much untapped
potential. In practice, the available decision time bud-
get may not be sufficient for exact methods, but there
often is non-negligible budget to be used, which may
vary from decision to decision (McKay and Wiers,
2003; Govind et al., 2008). It may hence be de-
sirable to spend this additional computational bud-
get to further improve solution quality. While this is
not possible using typical model-free reinforcement
learning approaches, model-based approaches such as
neural Monte Carlo Tree Search (MCTS) (Kemmer-
ling et al., 2024) allow for dynamic adjustments of
the computational budget to accommodate use case
and situation-specific requirements. At the same time,
neural MCTS retains the ability of model-free ap-
proaches to learn to exploit problem characteristics.
Neural MCTS algorithms gained attention when
AlphaGo marked a paradigm shift in computational
Kemmerling, M., Abdelrazeq, A. and Schmitt, R.
Solving Job Shop Problems with Neural Monte Carlo Tree Search.
DOI: 10.5220/0012311700003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 149-158
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
149

approaches to combinatorial games by beating a hu-
man champion in the game of Go (Silver et al., 2016),
followed by the successes of AlphaGo Zero (Silver
et al., 2017) and AlphaZero (Silver et al., 2018).
While the success of neural MCTS algorithms in
combinatorial games has been clearly established, it is
less clear how well such approaches transfer to prob-
lems outside of games, such as the JSP and combina-
torial optimization problems in general. To facilitate
such a transfer, some modifications to algorithms in
the AlphaZero family have to be made, since the char-
acteristics of games differ from the characteristics of
other problems in many ways, e.g. in their notion of
multiple players. Even those design choices in Alp-
haZero that can be directly transferred to the JSP may
not be the most beneficial in terms of performance
for this new problem. It is hence not clear what the
exact design of neural MCTS approaches for the JSP
should be. Indeed, neural MCTS approaches to prac-
tical problems feature a wide range of different design
choices (Kemmerling et al., 2024). The limited num-
ber of publications on this topic typically present a
finished solution, i.e. one specific design of a neural
MCTS algorithm without comparisons against alter-
native designs. We believe that a systematic investi-
gation of the effects of different design choices will be
valuable to practitioners trying to ascertain the right
design for their respective applications. To take a step
towards this vision, we perform such a systematic in-
vestigation for the JSP, as one representative of com-
binatorial optimization problems.
In the remainder of this work, we first give some
background on neural MCTS in Section 2 and de-
scribe the current research landscape on neural MCTS
for scheduling in Section 3. In Section 4, we model
the problem and describe our experimental setup, fol-
lowed by the results stemming from this setup in Sec-
tion 5, and a conclusion in Section 6.
2 NEURAL MONTE CARLO
TREE SEARCH
MCTS is a heuristic search method developed for
combinatorial game playing. To find appropriate
moves, it constructs a search tree based on random
sampling, in which nodes correspond to states and
edges to actions. Although MCTS developed inde-
pendently from reinforcement learning, the two ex-
hibit many similarities including the formulation of
policies and the estimation of state values. For a more
in depth discussion on this connection, the reader is
referred to Vodopivec et al. (2017). MCTS produces
policies π
MCT S
and value estimates v
MCT S
for specific
states, while modern reinforcement learning typically
aims to produce policies and value functions that gen-
eralize across states.
In the following, we focus on the single-player
version of MCTS, which assumes state transitions to
only be dependent on the current state and the selected
action, but not the actions of a further independent
player.
MCTS iteratively constructs its search tree by re-
peatedly performing a series of four phases start-
ing from the root of the tree: (1) selection, (2) ex-
pansion, (3) evaluation, (4) back-propagation, all of
which may vary slightly from one implementation to
another. Generally, in the selection phase, the next ex-
isting tree node to be visited is selected by choosing
an action for the current node’s state. This selection is
performed by balancing exploration of less explored
tree branches and exploitation of known high-value
branches, usually in the form of some version of a
Upper Confidence Bound for Trees (UCT) formula:
a = argmax
a
W (s, a)
N(s,a)
+ c
s
ln N(s)
N(s,a)
(1)
where W (s,a) is the cumulative reward of each
time action a has been chosen in state s, N(s,a) in-
dicates how often a has been chosen in s, N(s) are the
total visits of s and c is a constant weighting the explo-
ration term. The left part of the sum encourages ex-
ploitation while the right part encourages actions that
have been performed seldomly in the current state.
Once a leaf node is encountered in the selection
phase, the expansion phase begins and adds a subset
or all possible children to the current leaf node. At
this point, it is unclear what the value of these children
should be. To estimate the value of each newly ex-
panded node, standard MCTS procedure is to perform
random roll-outs from the node’s corresponding state
until a terminal state is reached and a reward is re-
ceived. This reward then forms the initial value of the
node and is propagated up the tree in the last MCTS
phase to update the value of all nodes preceding the
newly expanded ones. In a variant of this procedure,
not the newly expanded nodes, but the leaf node pre-
ceding them is evaluated. This reduces the number of
evaluations in each MCTS search but requires some
other way of initializing the newly expanded nodes’
values.
The MCTS procedure described above can be
modified to incorporate guidance by neural networks
in the first three phases. While this can take many dif-
ferent shapes, we evaluate only a subset of the varia-
tions surveyed during our previous review (Kemmer-
ling et al., 2024). In the selection phase, next to the
standard UCT rule described above, we also consider
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
150

the AlphaZero variant of the Predictor + UCT (PUCT)
rule (Silver et al., 2018):
a = argmax
a
W (s, a)
N(s,a)
+ c P(s,a)
p
N(s)
1 + N(s,a)
(2)
which introduces a prior probability P(s,a) pro-
duced by a policy neural network to further weight
the exploration term.
In the expansion phase, we consider full expan-
sion and a type of neural expansion which expands
only a subset of all possible children. This subset is
constructed as the smallest subset of potential chil-
dren whose policy probabilities sum to a given thresh-
old τ. Finally, in the evaluation phase, we consider
two possible neurally guided options next to random
roll-outs: roll-outs according to the learned policy,
and estimating a node’s value directly by the learned
function.
The neural guidance networks can then be trained
by a procedure called policy improvement by MCTS,
which alternatingly performs two steps: performing
a neural MCTS search guided by the current state of
the neural networks and subsequently using the re-
sults from the search π
MCT S
(s) and V
MCT S
(s) as train-
ing targets for the neural networks. Alternatively, the
neural networks can be trained by conventional means
such as supervised or model-free reinforcement learn-
ing and then simply used to guide MCTS at decision
time.
More information about neural MCTS can be
found in our previous literature review (Kemmerling
et al., 2024). For reference, AlphaZero is a neural
MCTS algorithm that consists of selection based on
the PUCT rule, full expansion, evaluation by a learned
value function and trains the underlying neural net-
work solely using policy improvement by MCTS (Sil-
ver et al., 2018).
3 RELATED WORK
Neural MCTS has received relatively little attention
in the context of the JSP. Rinciog et al. (2020) train
a neural MCTS agent to solve a special case of the
JSP in sheet metal scheduling, while G
¨
oppert et al.
(2021) model a dynamically interconnected assembly
system as a flexible job shop problem and train a neu-
ral MCTS agent to solve it. Both approaches orient
themselves closely on the AlphaZero architecture, in
which the MCTS phases take the form of PUCT selec-
tion, full expansion, and evaluation by a learned value
function. In both cases, neural networks are trained
by supervised learning on targets from a scheduling
heuristic. While Rinciog et al. (2020) additionally
train using policy improvement by MCTS after the
supervised training phase, the additional training only
leads to a marginally improved performance com-
pared to the employed scheduling heuristic.
Next to this small amount of research focused
on JSPs, neural MCTS has also been investigated
for further, related scheduling problems. These in-
clude parallel machine scheduling problems (Wang
et al., 2020; Oren et al., 2021) as well as directed
acyclic graph task scheduling (Cheng et al., 2019; Hu
et al., 2019). The exact approaches of these individ-
ual works vary. Some use learned policy roll-outs for
the evaluation phase instead of learned value function
evaluations (Wang et al., 2020; Cheng et al., 2019; Hu
et al., 2019), some use standard tree policies in the se-
lection phase (Oren et al., 2021; Hu et al., 2019), and
some employ neural expansion (Cheng et al., 2019;
Hu et al., 2019). To train the agents, PPO (Wang et al.,
2020), Q-Learning (Oren et al., 2021) and a combi-
nation of supervised pre-training and policy gradient
methods (Cheng et al., 2019; Hu et al., 2019) are used,
while training using policy improvement by MCTS is
not reported in any of the approaches.
The existing literature on neural MCTS in
scheduling problems hence features a considerable
amount of variation, but contains few comparisons of
different algorithmic variants under identical experi-
mental settings. A previously performed survey on
neural MCTS applications beyond scheduling (Kem-
merling et al., 2024) shows that neural MCTS ap-
proaches in general can be even more varied than the
currently existing approaches in scheduling. In the
face of this diversity in approaches, it is unclear which
kind of algorithmic configuration is appropriate for a
given problem such as the JSP and what the advan-
tages and disadvantages of particular design choices
in the configuration of neural MCTS agents are. This
points to a need for studies systematically assessing
the effect of different design choices, which we aim
to provide for the JSP in this document.
4 METHODS
4.1 Markov Decision Process
To train neural MCTS agents, we create an environ-
ment by modelling the JSP as a Markov decision pro-
cess (MDP), and define a corresponding observation
space, action space, and reward function. While de-
signing these components is crucial to the success of
any employed method, we aim to create a setup that is
functional but otherwise as simple as possible to keep
Solving Job Shop Problems with Neural Monte Carlo Tree Search
151

the focus on our main object of study.
Generally, the agent’s task is to schedule a set of
jobs J , with each job j ∈ J consisting of a set of op-
erations O
j
∈ O. In our case, the agent constructs a
schedule by iteratively selecting jobs whose first un-
scheduled operation is then placed at the earliest pos-
sible time of the existing partial schedule.
Observation Space. Our observation space is a
simplified version of the one proposed by Zhang
et al. (2020), consisting of two vectors: A vector of
length |O| in which every element corresponds to the
scheduling status of one particular operation. If the
operation has been scheduled already, the correspond-
ing element is 1, otherwise it is 0. Operations are
grouped into jobs and ordered by precedence con-
straints. The second vector is similarly structured
such that each element contains a lower bound on the
corresponding operation’s completion time.
Action Space. We employ a discrete action space
with size |J |, where each action a
i
, i = 0, . ..,|J | cor-
responds to scheduling the next operation o of job j
i
at
the earliest possible time. This means that, at the lat-
est, we schedule it on its required machine m just after
the last scheduled operation on m finishes processing.
However, if there is a large enough gap between two
already scheduled operations on m, we instead sched-
ule o within the identified gap.
Reward Function. We employ a sparse reward
function that evaluates the terminal state s
T
cor-
responding to a completed schedule based on its
makespan C
max
, i.e. the time the last operation fin-
ishes processing. Instead of directly using the nega-
tive makespan as a reward, we use the negative op-
timality gap with regard to a pre-computed optimum
C
opt
, as defined by Equation (3).
r(s
T
) = −
C
max
−C
opt
C
opt
(3)
While the requirement for known optima makes
this reward function unsuitable for practical settings,
in experimental settings such as ours it provides a
clear, unbiased reward signal that is easy to interpret.
4.2 Experimental Setup
All agents in our experiments are trained using the
JSP instances provided by Samsonov et al. (2022),
which are split into training set (90%) and test set
(10%). The experiments in the following section are
initially restricted to instances of size 6 ×6 to al-
low for more thorough experimentation while keep-
ing computational costs manageable. In Section 5.4,
the scaling properties of neural MCTS algorithms are
then investigated on instances of size 15 ×15.
Neural MCTS agents are trained using policy im-
provement by MCTS, which consists of alternatingly
collecting experience using MCTS and subsequent
training of the neural networks on experience sam-
pled from a replay buffer. In each policy improve-
ment iteration, 40 episodes of experience are col-
lected which are then stored in a first-in first-out re-
play buffer of size 36000. Unless otherwise specified,
each action is determined by performing 100 MCTS
simulations n
MCT S
, i.e. completing all four MCTS
phases 100 times. During training, one epoch of expe-
rience is sampled from the buffer to train the networks
in batches of size 256 using the Adam optimizer.
The employed neural networks are standard feed-
forward networks with two hidden layers of size 256
and Mish activation functions (Misra, 2019). Policy
and value networks are fully independent.
Next to neural MCTS agents, we train a Proximal
Policy Optimization (PPO) baseline using the stable-
baselines3 package (Raffin et al., 2019). For prob-
lems of size 6×6, we use a learning rate of 5E-05 and
the same network architecture as for the neural MCTS
agents. For problems of size 15 ×15, we use a learn-
ing rate of 1E-05, a clip range of 0.01 and a network
with three hidden layers of size 512 each. All other
hyper-parameters are kept at their default values.
5 RESULTS
To evaluate the effects of the different design choices
outlined in Section 2, we perform a series of experi-
ments using the setup described above. The first ex-
periment aims to establish a first understanding of the
effects of different factors, while the second aims to
reduce the computational cost associated with each
training run, thereby facilitating a much larger and
thorough third experiment.
Our first experiment follows a full factorial de-
sign with the following factors: (1) selection pol-
icy with levels UCT and PUCT, each with c = 1.0,
(2) expansion policy with levels full expansion and
neural expansion with τ = 0.9, (3) evaluation policy
with levels random roll-out, learned policy roll-out,
and learned value function evaluation, and (4) eval-
uated nodes with levels encountered leaf and newly
expanded nodes.
For each combination of these factors, we train a
separate neural MCTS agent and evaluate it on the test
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
152

set. Our response, or evaluation metric, is the average
reward of an agent on all test set instances.
While there is considerable variance in these aver-
age rewards for differently configured neural MCTS
agents, the best agent achieves an average optimal-
ity gap of 4.3%. We perform an analysis of variance
(ANOVA) of the results (see Table 1) and find that
only different choices in evaluation policy and which
nodes are evaluated lead to statistically significant dif-
ferences in the rewards of the corresponding agents.
Table 1: ANOVA results of a full factorial experiment with
four factors. Interactions between factors are not consid-
ered. All results matching a significance level of < 0.05 are
highlighted in bold.
Factor df SS MS F PR(> F)
Sel. pol. 1 0.00 0.00 0.00 9.51E-01
Exp. pol. 1 0.01 0.01 1.65 2.15E-01
Eval. pol. 2 0.07 0.04 7.12 5.26E-03
Eval. nodes 1 0.33 0.33 64.14 2.41E-07
Residual 18 0.09 0.01
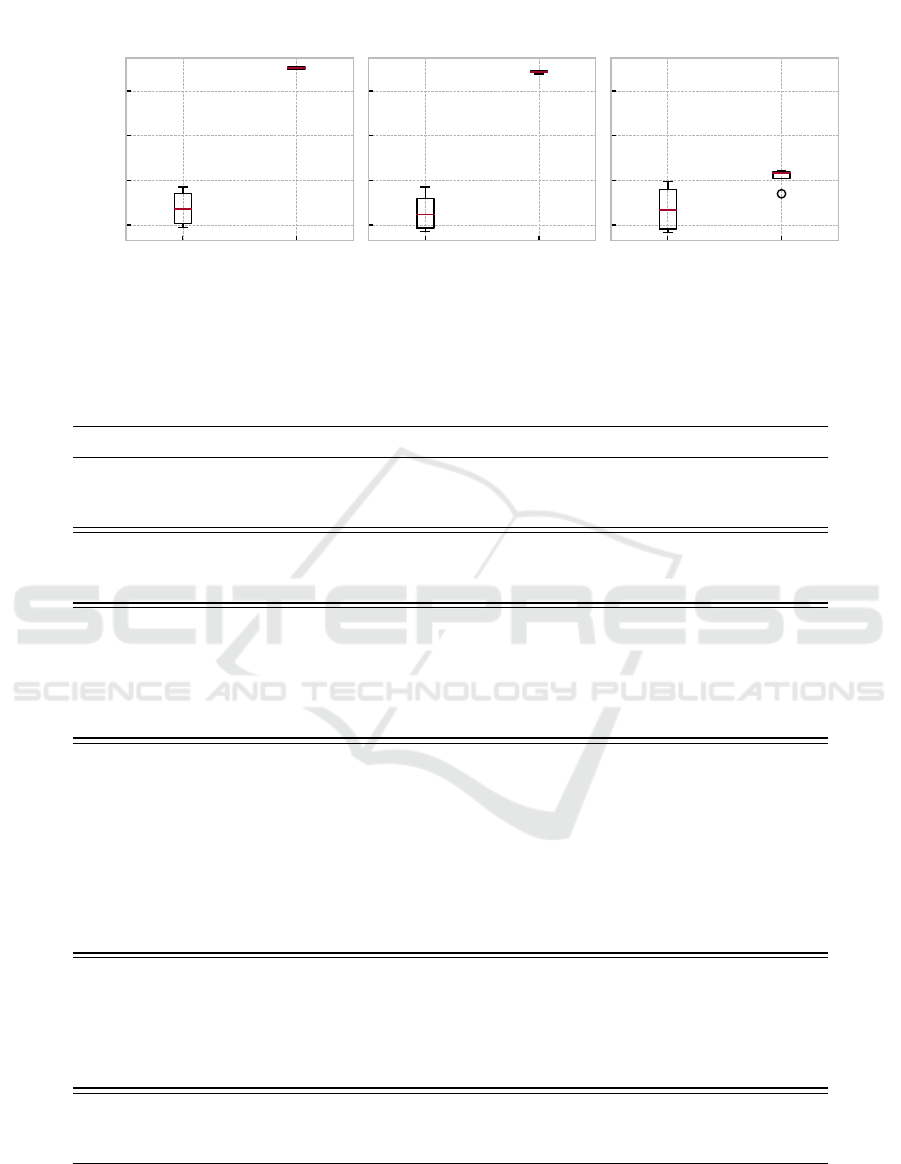
Between these two factors, the choice of which
nodes to evaluate has the biggest impact. The
boxplots in Figure 1 show that the average reward
when only evaluating encountered leaves is between
−0.3 and −0.4 regardless of the evaluation method.
When newly expanded nodes are evaluated instead,
the performance of all evaluation methods increases,
although only a modest improvement can be ob-
served when using learned value evaluation. The
performance of the two roll-out methods undergoes
a more dramatic improvement with average rewards
> −0.05. Surprisingly, random roll-outs appear to
slightly outperform policy-guided roll-outs.
In summary, in this experiment, MCTS agents
with neural guidance do not achieve better results than
MCTS agents without neural guidance and the per-
formance of the agents is clearly dominated by the
number of evaluated nodes. The number of evalu-
ated nodes, however, has a big impact on the com-
putational cost of the algorithms. Especially with
the more expensive evaluation methods based on roll-
outs, evaluating all newly expanded nodes can lead
to undesirably long run times. While evaluating all
expanded nodes using learned value evaluation is a
fairly cheap operation requiring only a single neural
network call, the resulting performance is only mod-
erately better than evaluating only the encountered
leaf.
In the following, we aim to combine the best of
both approaches by initializing each newly expanded
node with a learned value estimate and additionally
evaluating the encountered leaf with a roll-out.
5.1 Initializing Nodes & Trees
We investigate two initialization methods, the first
of which works as described above, i.e. by using a
learned value function to initialize node values. While
the value estimates may not be perfect, this type of
initialization is meant to provide the search some
guidance especially early on, when the search space
has not been explored much. The second method ful-
fills a similar purpose, but operates on the tree level
instead of the node level. Here, we populate the ini-
tial tree by one full roll-out of a learned policy. The
first initialization method will be referred to as value
initialization, while the second one will be referred to
as tree initialization in the following.
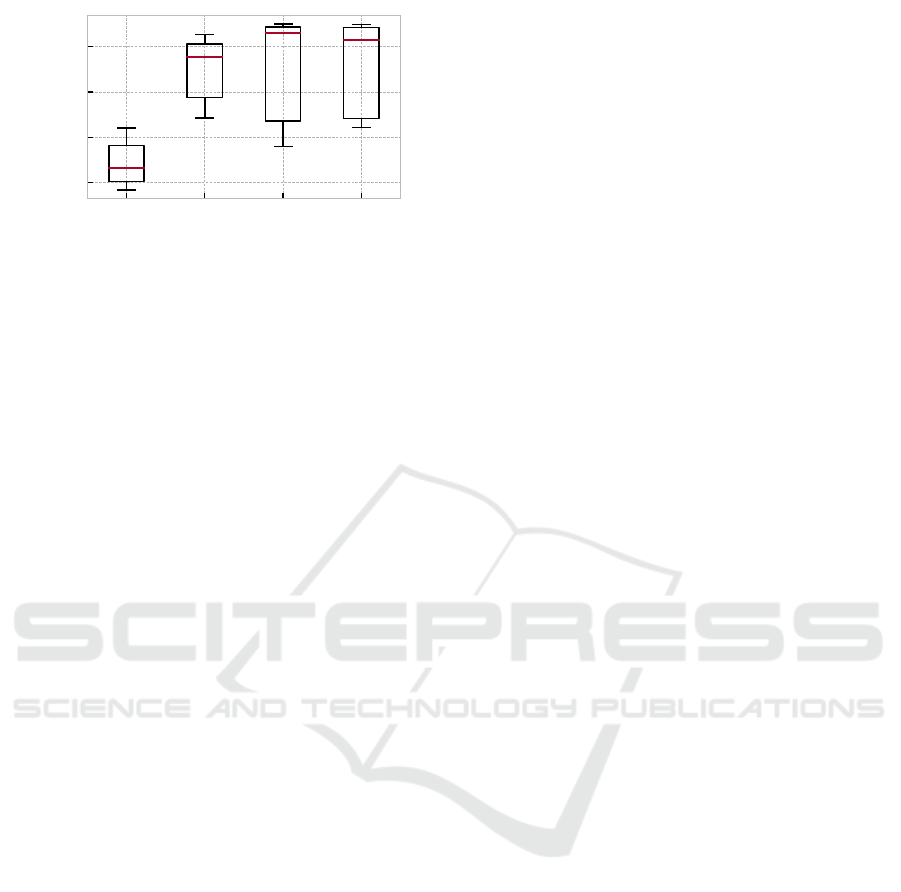
As depicted in Figure 2, both initialization meth-
ods lead to a significant performance improvement
compared to evaluating only encountered leaves with-
out any additional initialization method. On aver-
age, value initialization alone leads to higher rewards
than tree initialization and applying both initialization
methods at the same time, albeit with slightly higher
variance. Comparing these results to the ones in the
previous section, it becomes clear that evaluating only
leaves and applying value initialization can match the
performance of evaluating all expanded nodes, but at
much reduced computational cost.
5.2 Additional Design Choices
The number of design choices in the previous exper-
iments has been very limited both in the factors and
their levels to get a first overview of their effects and
arrive at agent configurations that achieve good re-
sults within reasonable time. In the following, we per-
form a more thorough examination comprising more
factors than before, but we limit ourselves to agents
with value initialization and evaluation of encoun-
tered leaves. We again investigate different choices
for the selection policy, the expansion policy, and
evaluation policy, but consider a much larger num-
ber of levels for each of these factors (see Table 2).
For the selection policy we consider PUCT rules with
a larger variety of exploration constants and for the
expansion policy we consider a larger number of neu-
ral expansion thresholds, where a threshold of τ = 1.0
corresponds to full expansion. Additionally, we vary
the number of MCTS simulations and the weights of
the individual loss components (see Table 2). To ac-
complish the latter while keeping the number of ex-
perimental factors limited, we introduce factors for
Solving Job Shop Problems with Neural Monte Carlo Tree Search
153
Evaluate
Encountered
Leaves
Evaluate
Expanded
Nodes
−0.4
−0.3
−0.2
−0.1
Random
Roll-out
Evaluate
Encountered
Leaves
Evaluate
Expanded
Nodes
Learned Policy
Roll-out
Evaluate
Encountered
Leaves
Evaluate
Expanded
Nodes
Learned Value
Evaluation
Avg. Reward
1
Figure 1: Effects of the two significant factors evaluation policy and evaluated nodes visualized as boxplots of the average
test set reward.
Table 2: Tukey’s honestly significant difference (HSD) test on the factors with significant results in the preceding ANOVA.
Significant differences between the means of two levels are highlighted in bold. Positive values in the mean difference column
indicate that the second group in the row leads to better results.
Factor Group 1 Group 2 Mean Diff. p-Adj. Lower Upper Reject
Entropy
Loss
Weight
0.1 0.33 0.0051 0.6191 -0.0077 0.0179 False
0.1 0.5 0.0076 0.3498 -0.0053 0.0204 False
0.33 0.5 0.0025 0.8944 -0.0104 0.0153 False
Value
Loss
Weight
0.1 0.33 0.0002 0.9994 -0.0127 0.013 False
0.1 0.5 0.0037 0.7776 -0.0091 0.0165 False
0.33 0.5 0.0035 0.7968 -0.0093 0.0164 False
Number
of
Simulations
10 50 0.0304 0.0 0.0143 0.0464 True
10 100 0.0401 0.0 0.0241 0.0561 True
10 200 0.0469 0.0 0.0309 0.0629 True
50 100 0.0097 0.4024 -0.0063 0.0257 False
50 200 0.0166 0.0396 0.0005 0.0326 True
100 200 0.0068 0.6906 -0.0092 0.0229 False
Selection
Policy
PUCT, c=0.1 PUCT, c=0.5 -0.0022 0.9978 -0.0215 0.017 False
PUCT, c=0.1 PUCT, c=1 -0.0058 0.926 -0.025 0.0135 False
PUCT, c=0.1 PUCT, c=10 -0.016 0.1587 -0.0352 0.0033 False
PUCT, c=0.1 UCT, c=1 -0.001 0.9999 -0.0203 0.0183 False
PUCT, c=0.5 PUCT, c=1 -0.0035 0.9876 -0.0228 0.0158 False
PUCT, c=0.5 PUCT, c=10 -0.0137 0.2956 -0.033 0.0056 False
PUCT, c=0.5 UCT, c=1 0.0012 0.9998 -0.018 0.0205 False
PUCT, c=1 PUCT, c=10 -0.0102 0.5991 -0.0295 0.0091 False
PUCT, c=1 UCT, c=1 0.0048 0.9621 -0.0145 0.024 False
PUCT, c=10 UCT, c=1 0.015 0.2127 -0.0043 0.0342 False
Neural
Expansion
Threshold
1.0 0.5 -0.148 0.0 -0.161 -0.1349 True
1.0 0.8 -0.0563 0.0 -0.0693 -0.0432 True
1.0 0.9 0.0067 0.5535 -0.0064 0.0197 False
0.5 0.8 0.0917 0.0 0.0786 0.1047 True
0.5 0.9 0.1547 0.0 0.1416 0.1677 True
0.8 0.9 0.063 0.0 0.0499 0.076 True
Eval
Policy
Learned Policy Learned Value -0.1463 0.0 -0.1559 -0.1367 True
Learned Policy Random 0.0005 0.9908 -0.0091 0.0101 False
Learned Value Random 0.1468 0.0 0.1372 0.1564 True
the value loss L
v
and entropy loss L
H
, but set the pol-
icy loss implicitly as L
π
= 1 −L
v
−L
H
.
We perform a full factorial experiment on all these
factors with a total of 2160 differently configured
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
154
No
Initialisation
Tree
Initialisation
Value
Initialisation
Both
−0.4
−0.3
−0.2
−0.1
Avg. Reward
1
Figure 2: Effects of different initialization methods on test
set rewards.
agents. To limit the time required to train all these
agents, we reduce the number of policy iterations
from 100 in the previous experiments to 30, as little
improvement could be observed past 30 iterations in
the previous experiments.
An ANOVA of the results of this experiment
shows that significant differences exist between the
means of levels of all factors. We select Tukey’s HSD
as a post-hoc test to analyze which design choices are
especially beneficial and display the results in Table 2.
The results are consistent with the previous experi-
ments, with the evaluation policy being the most im-
pactful factor. The choice of exploration constant in
the selection policy does not lead to significant dif-
ferences, and larger neural expansion thresholds gen-
erally lead to better results. As expected, the qual-
ity of solutions increases with the number of simu-
lations. A point of diminishing returns appears to be
reached fairly quickly, however, as 200 simulations do
not lead to significantly improved results compared to
100 simulations.
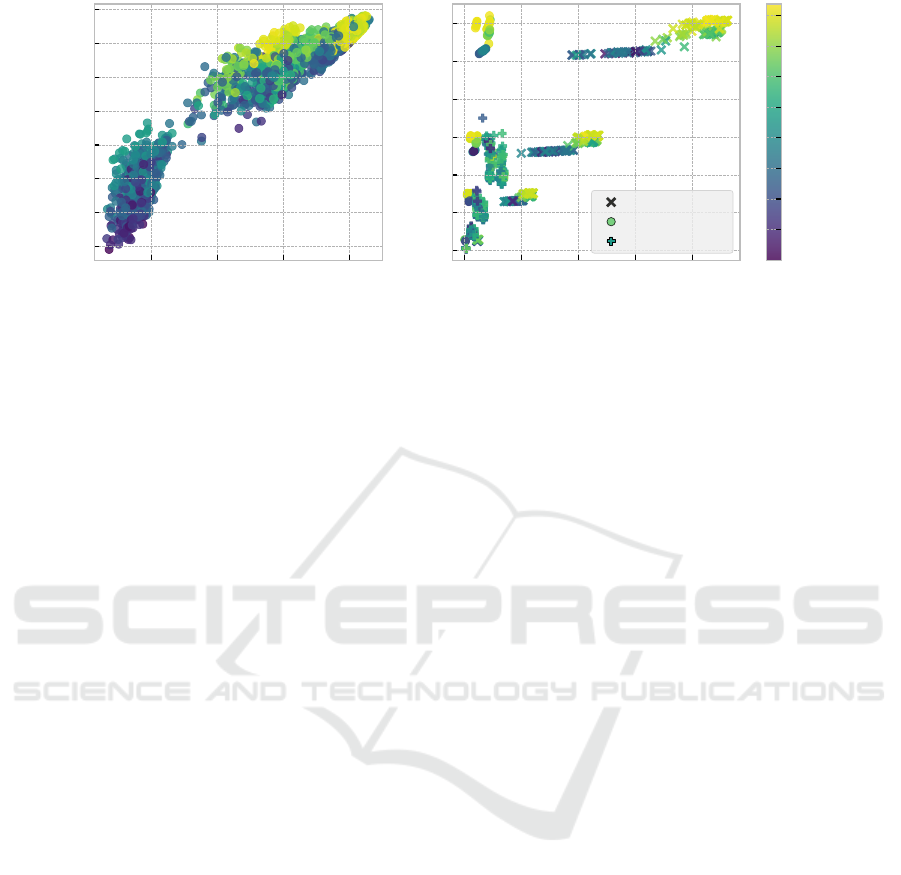
Weighting the loss components differently does
not result in significantly different outcomes. How-
ever, when examining the average entropy of both
the learned policy vectors and the MCTS policy vec-
tor of an agent, it becomes clear that, not only do
they correlate with each other, there is also a relation-
ship between the entropy and the achieved rewards.
As Figure 3 shows, the highest rewards are achieved
only when the entropy of the learned policy vector is
roughly > 0.75, but not below. Similarly, the highest
rewards are observed when the entropy of the MCTS
policy vector is > 0.5.
While different agent configurations lead to dif-
ferences in performance, design choices also have an
effect on the computational expense of an agent. This
is mainly reflected in the number of times the dynam-
ics model and the neural networks are called, which
is primarily determined by the employed evaluation
method. The exact run time will then depend on hard-
ware and the efficiency and complexity of both the dy-
namics model and the neural network. In Figure 3, the
impact of the three different evaluation methods on
model and neural network calls is visualized. While
learned value function evaluation unsurprisingly leads
to the smallest amount of model calls and may there-
fore be especially efficient in many cases, this is un-
likely to be of interest, as the resulting performance
lacks far behind the other two methods. Among these
other two roll-out methods, the number of model calls
is comparable, but the learned policy roll-out method
makes many more neural network calls than the ran-
dom roll-out method. In light of the comparable qual-
ity of their achieved solutions, the random roll-out
method is clearly preferable in practice.
5.3 The Impact of MCTS Budget
One promise of neural MCTS is the ability to vary the
search budget n
MCT S
at decision time to achieve the
best possible solutions given current time constraints.
Each of the n
MCT S
search iterations consists of com-
pleting the four MCTS phases. In the following, we
investigate the effect of different search budgets, both
during training and at decision time.
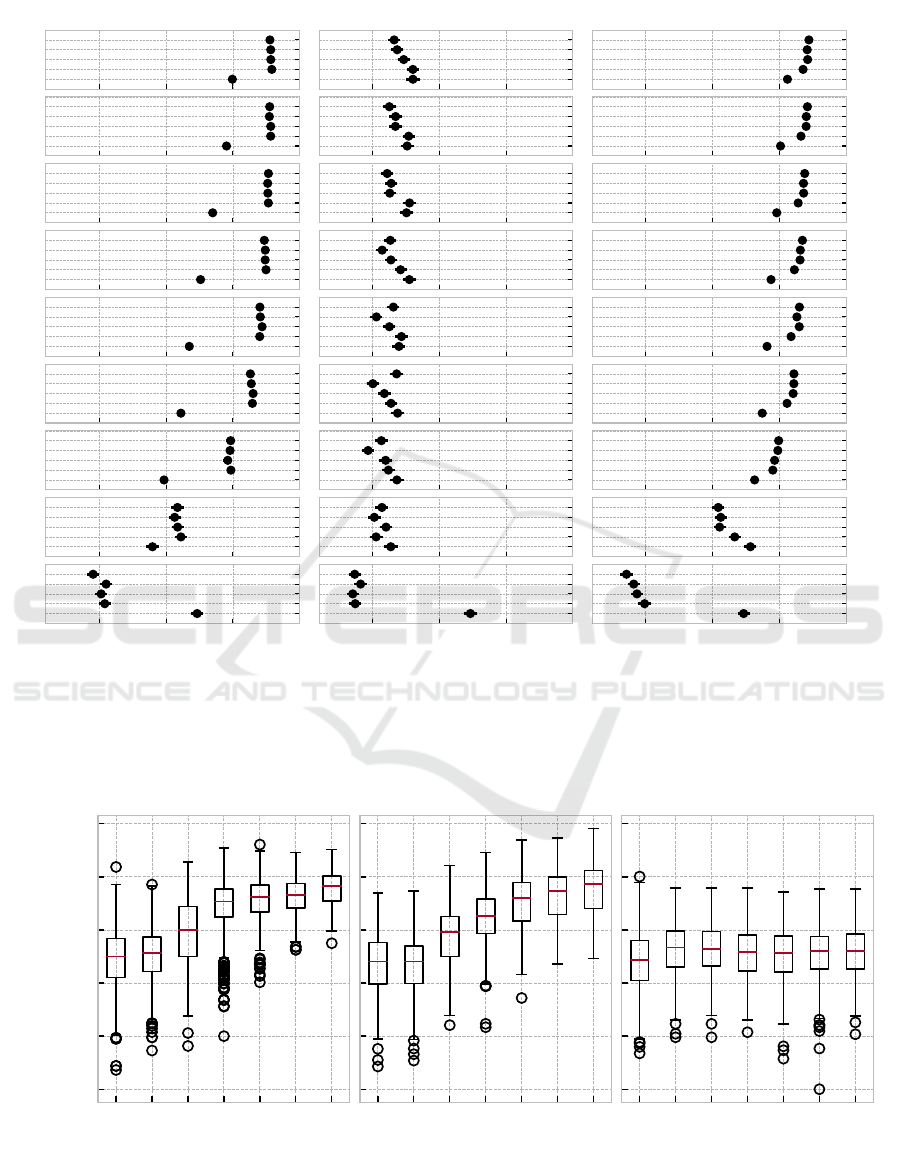
As Figure 4 shows, the search budget at deci-
sion time has a strong influence on solution quality,
with larger budgets generally leading to better solu-
tions. This is the case for all evaluation methods, al-
though the improvement is less pronounced when us-
ing learned value function evaluation. Surprisingly,
the search budget during training has only a small ef-
fect on solution quality. When using random eval-
uation, the effect of different n
MCT S
during training
is negligible, while learned policy evaluation benefits
from larger search budgets during training to a small
degree. This trend is reversed on very small decision
time budgets (n
MCT S
< 10), presumably because the
policy network learns to maximize rewards given only
few look-ahead searches.
When the policies trained using policy improve-
ment by MCTS are used model-free, i.e. without any
decision-time search, they are generally inferior to
policies trained by PPO. For any decision time bud-
get n
MCT S
≥ 10, employing a policy trained by PPO
in the tree search leads to significantly worse results,
with the exception of agents with learned value func-
tion evaluation.
The best agent configurations with n
MCT S
= 200
and n
MCT S
= 100, achieve average test set rewards of
−0.041 and −0.046, respectively. For comparison,
the average SPT, LPT and PPO rewards are −0.161,
−0.217, −0.167, respectively.
Solving Job Shop Problems with Neural Monte Carlo Tree Search
155
0.2 0.4 0.6 0.8
MCTS Entropy
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Learned Policy Entropy
0.0 0.5 1.0 1.5 2.0
Neural Net Calls ×10
9
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Model Calls ×10
9
Learned Policy
Random
Learned Value
−0.400
−0.375
−0.350
−0.325
−0.300
−0.275
−0.250
−0.225
−0.200
Reward
Figure 3: Left: Each agent’s average policy distribution entropy as computed by the learned policy and by MCTS. Right:
Total calls to the model and to the neural networks over the course of the training.
5.4 Scaling to Larger Instances
The previous experiments are concerned with rela-
tively small instances of size 6 ×6. To investigate
the scaling properties of neural MCTS on larger in-
stances, we train differently configured agents on
15 ×15 instances in a full factorial experiment. In
this case, the factors are comprised of the selection
policy, the expansion policy, and the evaluation pol-
icy. The selection policy can either be a UCT or
PUCT rule, each with c = 1.0 and the expansion pol-
icy can either be full expansion or neural expansion
with τ = 0.9. Since training 15 ×15 instances is gen-
erally more computationally expensive and the pre-
vious experiments show that the MCTS budget dur-
ing training does not have a big impact, we set it to a
lower value of n
MCT S
= 10.
As shown in Figure 5, the impact of different
evaluation policies follows a similar pattern as on
the smaller instances. Evaluation by a learned value
function leads to significantly worse results than the
two roll-out based methods. Compared to the previ-
ous experiments, random roll-outs and learned policy
roll-outs switch places with the neurally guided roll-
outs performing better on average, especially when
n
MCT S
≤ 10. This reversal may indicate that neural
guidance provides a useful bias in exploring the in-
creased search space of larger instances, whereas in
smaller instances, unbiased evaluation methods are
preferable as the search space can be more easily cov-
ered. The best performing agent achieves an aver-
age test set reward of −0.179 compared to −0.269,
−0.377, and −0.335 for SPT, LPT and PPO.
6 CONCLUSION
We set out to gain an understanding of the effect of
different neural MCTS design choices and to arrive
at agent configurations with strong performance on
the JSP. While many forms of neural guidance do not
have a clear benefit in our experiments, agents with a
combination of node value initialization and roll-out
based evaluation significantly outperform a model-
free baseline trained by PPO at reasonable computa-
tional cost. Further, we find that the MCTS search
budget used during training has only a minor effect
on the trained agent’s performance, while the search
budget during decision time is much more influential.
This means that agents can be trained relatively effi-
ciently with small budgets and that the budget at deci-
sion time can be varied dynamically to adhere to sit-
uational time constraints while maximizing decision
quality.
Our investigation is concerned with a subset of
all possible design choices of neural MCTS agents,
but further experiments with additional factors may
reveal agents with even more favorable properties.
These may include mixed evaluation policies with
different mechanisms depending on the depth of the
node to be evaluated, mechanisms that exploit max-
imum node values instead of average ones, reward
functions based on self-competition, and many more.
One illuminating future research direction may be
in investigating what kinds of scheduling situations
call for neural MCTS and what situations are ade-
quately addressed by model-free approaches.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
156
1000
Random Learned Value
0
10
50
100
200
Learned Policy
500
0
10
50
100
200
200
0
10
50
100
200
100
0
10
50
100
200
50
0
10
50
100
200
25
0
10
50
100
200
10
0
10
50
100
200
5
0
10
50
100
200
-0.30 -0.20 -0.10 0.00
0
-0.30 -0.20 -0.10 0.00 -0.30 -0.20 -0.10 0.00
0
10
50
100
200
Training MCTS Budget
Decision Time MCTS Budget
Avg. Test Set Reward
Training MCTS Budget
Decision Time MCTS Budget
Training MCTS Budget
Decision Time MCTS Budget
Figure 4: The effect of the search budget n
MCT S
at decision time (rows) and during training (vertical axis in each subplot) on
the average reward on the test set (horizontal axes). Results are divided into the three different evaluation methods: random
roll-outs (left), learned value function evaluation (middle), and learned policy roll-outs (right). A training budget n
MCT S
= 0
corresponds to an agent trained by PPO, and a decision time budget n
MCT S
= 0 corresponds to the trained policy being applied
in a model-free manner, without any search at decision-time.
0 1 5 10 25 50 100
−1.0
−0.8
−0.6
−0.4
−0.2
0.0
Learned Policy
0 1 5 10 25 50 100
Random
0 1 5 10 25 50 100
Learned Value
Decision Time MCTS Budget
Avg. Test Reward
1
Figure 5: Test set performance of neural MCTS agents with different evaluation policies on 15 ×15 instances. The MCTS
budget at decision time is varied, but held constant at n
MCT S
= 10 during training.
Solving Job Shop Problems with Neural Monte Carlo Tree Search
157

ACKNOWLEDGEMENTS
Funded by the Deutsche Forschungsgemeinschaft
(DFG, German Research Foundation) under Ger-
many’s Excellence Strategy – EXC-2023 Internet of
Production – 390621612.
ROLES & CONTRIBUTIONS
Marco Kemmerling: Conceptualization, Methodol-
ogy, Software, Visualization, Writing – Original Draft
Anas Abdelrazeq: Writing - Review & Editing
Robert H. Schmitt: Project administration, Funding
REFERENCES
Cheng, Y., Wu, Z., Liu, K., Wu, Q., and Wang, Y. (2019).
Smart DAG tasks scheduling between trusted and un-
trusted entities using the MCTS method. Sustainabil-
ity, 11(7):1826. Publisher: MDPI.
Govind, N., Bullock, E. W., He, L., Iyer, B., Krishna, M.,
and Lockwood, C. S. (2008). Operations management
in automated semiconductor manufacturing with inte-
grated targeting, near real-time scheduling, and dis-
patching. IEEE Transactions on Semiconductor Man-
ufacturing, 21(3):363–370. Publisher: IEEE.
G
¨
oppert, A., Mohring, L., and Schmitt, R. H. (2021).
Predicting performance indicators with ANNs for
AI-based online scheduling in dynamically intercon-
nected assembly systems. Production Engineering,
15(5):619–633. Publisher: Springer.
Hu, Z., Tu, J., and Li, B. (2019). Spear: Optimized
Dependency-Aware Task Scheduling with Deep Re-
inforcement Learning. In 2019 IEEE 39th Interna-
tional Conference on Distributed Computing Systems
(ICDCS), pages 2037–2046.
Kemmerling, M., L
¨
utticke, D., and Schmitt, R. H. (2024).
Beyond Games: A Systematic Review of Neural
Monte Carlo Tree Search Applications. Applied In-
telligence. Publisher: Springer (In Press).
McKay, K. N. and Wiers, V. C. (2003). Planning, schedul-
ing and dispatching tasks in production control. Cog-
nition, Technology & Work, 5:82–93. Publisher:
Springer.
Misra, D. (2019). Mish: A self regularized non-monotonic
activation function. arXiv preprint arXiv:1908.08681.
Oren, J., Ross, C., Lefarov, M., Richter, F., Taitler, A.,
Feldman, Z., Di Castro, D., and Daniel, C. (2021).
SOLO: search online, learn offline for combinatorial
optimization problems. In Proceedings of the Inter-
national Symposium on Combinatorial Search, vol-
ume 12, pages 97–105. Issue: 1.
Raffin, A., Hill, A., Ernestus, M., Gleave, A., Kanervisto,
A., and Dormann, N. (2019). Stable baselines3.
Rinciog, A., Mieth, C., Scheikl, P. M., and Meyer, A.
(2020). Sheet-metal production scheduling using Al-
phaGo Zero. In Proceedings of the Conference on
Production Systems and Logistics: CPSL 2020.
Samsonov, V., Hicham, K. B., and Meisen, T. (2022). Rein-
forcement Learning in Manufacturing Control: Base-
lines, challenges and ways forward. Engineering Ap-
plications of Artificial Intelligence, 112. Publisher:
Elsevier.
Samsonov, V., Kemmerling, M., Paegert, M., L
¨
utticke, D.,
Sauermann, F., G
¨
utzlaff, A., Schuh, G., and Meisen,
T. (2021). Manufacturing Control in Job Shop En-
vironments with Reinforcement Learning. In Pro-
ceedings of the International Conference on Agents
and Artificial Intelligence: ICAART 2021, volume 2,
pages 589–597.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., and others
(2016). Mastering the game of Go with deep neural
networks and tree search. nature, 529(7587):484–489.
Publisher: Nature Publishing Group.
Silver, D., Hubert, T., Schrittwieser, J., Antonoglou, I., Lai,
M., Guez, A., Lanctot, M., Sifre, L., Kumaran, D.,
Graepel, T., and others (2018). A general reinforce-
ment learning algorithm that masters chess, shogi, and
Go through self-play. Science, 362(6419):1140–1144.
Publisher: American Association for the Advance-
ment of Science.
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou,
I., Huang, A., Guez, A., Hubert, T., Baker, L.,
Lai, M., Bolton, A., and others (2017). Mastering
the game of go without human knowledge. nature,
550(7676):354–359. Publisher: Nature Publishing
Group.
Vodopivec, T., Samothrakis, S., and Ster, B. (2017). On
monte carlo tree search and reinforcement learning.
Journal of Artificial Intelligence Research, 60:881–
936.
Wang, J. H., Luo, P. C., Xiong, H. Q., Zhang, B. W.,
and Peng, J. Y. (2020). Parallel Machine Workshop
Scheduling Using the Integration of Proximal Policy
Optimization Training and Monte Carlo Tree Search.
In 2020 Chinese Automation Congress (CAC), pages
3277–3282. IEEE.
Zhang, C., Song, W., Cao, Z., Zhang, J., Tan, P. S., and Xu,
C. (2020). Learning to dispatch for job shop schedul-
ing via deep reinforcement learning. arXiv preprint
arXiv:2010.12367.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
158
