
Investigating Color Illusions from the Perspective of Computational
Color Constancy
Oguzhan Ulucan, Diclehan Ulucan and Marc Ebner
Institut f
¨
ur Mathematik und Informatik, Universit
¨
at Greifswald,
Walther-Rathenau-Straße 47, 17489 Greifswald, Germany
Keywords:
Computational Color Constancy, Color Assimilation Illusions, Color Illusion Perception.
Abstract:
Color constancy and color illusion perception are two phenomena occurring in the human visual system, which
can help us reveal unknown mechanisms of human perception. For decades computer vision scientists have
developed numerous color constancy methods, which estimate the reflectance of the surface by discounting
the illuminant. However, color illusions have not been analyzed in detail in the field of computational color
constancy, which we find surprising since the relationship they share is significant and may let us design more
robust systems. We argue that any model that can reproduce our sensation on color illusions should also be
able to provide pixel-wise estimates of the light source. In other words, we suggest that the analysis of color
illusions helps us to improve the performance of the existing global color constancy methods, and enable them
to provide pixel-wise estimates for scenes illuminated by multiple light sources. In this study, we share the
outcomes of our investigation in which we take several color constancy methods and modify them to reproduce
the behavior of the human visual system on color illusions. Also, we show that parameters purely extracted
from illusions are able to improve the performance of color constancy methods. A noteworthy outcome is
that our strategy based on the investigation of color illusions outperforms the state-of-the-art methods that are
specifically designed to transform global color constancy algorithms into multi-illuminant algorithms.
1 INTRODUCTION
More than 20% of the human brain is devoted to vi-
sual processing (Sheth and Young, 2016). Color vi-
sion might be the simplest visual attribute to under-
stand as stated by Semir Zeki (Zeki, 1993), hence
understanding color processing might be the key to
unraveling how the brain works as a whole. Color
illusion perception and color constancy are two phe-
nomena related to color processing, whose mecha-
nisms are still not entirely discovered. These phe-
nomena can help us to reveal unknown mechanisms
of the brain and let us design artificial systems one
step closer to mimicking the human visual system.
One of the interesting facts of color processing is
that under some circumstances, the perceived color
can be quite different than the actual physical re-
flectance of the object. The way we are fooled by
color illusions can be given as an example of the dif-
ference between the perceived color and actual re-
flectance of an object. An example color illusion can
be seen in Fig. 1. We perceive the colors of the disks
as bluish, pinkish, and yellowish, while all the disks
Assimilation Illusion Target Region
Figure 1: Color assimilation illusion (Bach, 2023). Al-
though we perceive the colors of the disks as if they have
different colors, they are in fact the same when we remove
the inducers, i.e., context, as shown in the target image.
have the same reflectance. The reason behind this il-
lusion, called the color assimilation illusion, is that
the perceived color of the target shifts towards that of
its local neighbors.
Another fascinating aspect of color processing is
that the human visual system estimates the reflectance
of a scene by discounting the illuminant. Hence,
the perceived color of an object remains constant re-
gardless of the illumination conditions (Gegenfurtner,
1999; Brainard and Radonjic, 2004; Ebner, 2007;
Hurlbert, 2007). This phenomenon is called color
constancy. For years, researchers in the fields of
neuroscience and computer vision have carried out
Ulucan, O., Ulucan, D. and Ebner, M.
Investigating Color Illusions from the Perspective of Computational Color Constancy.
DOI: 10.5220/0012311600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
25-36
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
25

numerous studies related to color constancy (Land,
1977; Buchsbaum, 1980; Brainard et al., 2006; Cor-
ney and Lotto, 2007; Van De Weijer et al., 2007;
Ebner, 2011; Dixon and Shapiro, 2017; Qian et al.,
2019; Afifi et al., 2021). While in the former it is de-
sired to understand human color constancy, in the lat-
ter it is aimed to estimate the illuminant of the scene.
The connection between color illusions and color
constancy has been pointed out in both computational
biology and computer vision (Marini and Rizzi, 2000;
Corney and Lotto, 2007; Gomez-Villa et al., 2019;
Ulucan et al., 2022a), but never investigated together
deeply in the field of computational color constancy.
As presented in computational biology studies, it is
important to both reproduce the behavior of the hu-
man visual system on color illusions and to perform
color constancy (Corney and Lotto, 2007). Yet, com-
putational biology studies aiming at explaining color
illusion perception only accomplish to mimic the hu-
man visual system’s response to color illusions but
they do not provide any detailed analysis on illumi-
nant estimation (Marini and Rizzi, 1997; Marini and
Rizzi, 2000), whereas computational color constancy
studies only aim at estimating the illuminant. We find
it rather surprising that even though color constancy
methods can estimate the illuminant, the analysis of
color illusions is neglected, which could provide sig-
nificant benefits. In this study, by using a learning-
free approach we attempt to show that there is indeed
a relationship between color illusions and color con-
stancy, in particular between the color assimilation il-
lusions and multi-illuminant color constancy since the
relationship between the spatially close regions is im-
portant for both phenomena. We argue that if we an-
alyze color illusions from the perspective of compu-
tational color constancy, we can highlight the natural
link between these two phenomena and learn from the
outcomes of this investigation to modify global color
constancy algorithms so that they can provide pixel-
wise estimations, and hence perform multi-illuminant
color constancy. Also, we argue that by using the re-
sults of the investigation of color illusions we can en-
hance the efficiency of the global color constancy al-
gorithms. Furthermore, since color illusions and color
constancy are two important phenomena that occur
due to the processing of the human brain, the out-
comes of investigating these phenomena together may
help us to design artificial systems that are one step
closer to mimicking human visual perception (Bach
and Poloschek, 2006; Gomez-Villa et al., 2019). It is
important to note here that despite numerous studies
conducted in this field, the biological explanation for
the link between color illusions and color constancy
is still unknown. If we could explain this link bio-
logically as well as how the human visual system dis-
counts the illuminant and is fooled by the illusions,
then we would basically have a correct model of hu-
man color processing, hence, we would be able to
develop algorithms for both digital photography and
computer vision applications that would satisfy the
consumers around the world (Ebner, 2009).
To the best of our knowledge, this is the first
study in the field of computational color constancy
that stresses the importance of the relationship be-
tween color assimilation illusions and color constancy
in detail.
Our contributions can be summarized as follows;
• We investigate color illusions from the perspec-
tive of computational color constancy algorithms.
• We introduce a simple yet effective approach
based on our findings from the investigation of
color illusions that transforms the global color
constancy algorithms into multi-illuminant color
constancy methods, which do not require any in-
formation about the scene.
• We show that our approach improves the perfor-
mance of existing color constancy methods.
This paper is organized as follows. In Sec. 2, we
briefly explain the field of computational color con-
stancy. In Sec. 3, we introduce our approach. In
Sec. 4, we discuss the results for color assimilation
illusions, and in Sec. 5 we provide the outcomes for
both multiple and single illuminant color constancy.
In Sec. 6, we summarize our work.
2 BACKGROUND
Before introducing our proposed approach we would
like to give a brief summary of the widely used im-
age formation model in the field of color constancy
and color constancy algorithms since throughout the
paper we will investigate color illusions from the per-
spective of color constancy algorithms.
2.1 Theory of Color Image Formation
We begin to process visual information when the light
entering the eye is measured by the photoreceptors,
e.g., cones, present in the retina, whereas artificial
systems start to process visual information when an
array of sensors measures the incident light. In case
the camera contains three different sensors, then each
sensor responds to a specific light from the distinct
parts of the visible spectrum, i.e., short-, middle-, and
long-wavelength. Let us suppose that the camera sen-
sors are capturing every spatial location of the scene.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
26

Then, the measured energy of the signal at the spatial
location (x, y) can be formulated as follows;
I(x, y) =
Z
w
E(x, y; λ)S
i
(λ)dλ (1)
where, E(x, y; λ) is the irradiance hitting the sensors
of the capturing device, and S
i
(λ) is the sensor speci-
fications of the camera that contains the responses of
the sensors for a specific wavelength, with i ∈ {long,
middle, short}, and λ is the wavelength of the visible
spectrum.
In color constancy studies, we mostly assume that
the surface is equally reflecting the light into all di-
rections, i.e., Lambartian surface, and the scene is il-
luminated by a point light source L(x, y; λ). Thus, the
irradiance hitting the sensors of the camera can be ex-
pressed as follows;
E(x, y; λ) = G(x, y)R(x, y; λ)L(x, y; λ) (2)
where, R(x, y; λ) is the (shaded) reflectance, and
G(x, y) is the scaling factor that can be expressed as
cos α, where α is the angle between the surface nor-
mal vector and a vector pointing in the direction of
the light source.
Consequently, an image captured by the camera is
generally modeled by using the model of Lambertian
image formation, and it can be formulated as follows;
I(x, y) = G(x, y)
Z
w
R(x, y;λ)L(x, y;λ)S
i
(λ)dλ. (3)
The aim of color constancy is to estimate the il-
luminant L from the input image I with a color cast.
However, as we can see from the Eqn. 3, color con-
stancy is framed as a computational challenge, i.e.,
an ill-posed problem, since it depends on both the
type of the sensors and the illumination, which we
cannot be sure of. Therefore, most of the algorithms
make relaxations to the ill-posed nature of color con-
stancy by assuming that the camera sensor responses
are narrow-band, i.e., they can be approximated by
Dirac’s delta functions, and the scene is uniformly il-
luminated. Moreover, most of the algorithms do not
consider the scene geometry G(x, y). Thus, the im-
age can be formed as the element-wise product of the
reflectance R and the global illumination source L as
follows;
I(x, y) = R(x, y) · L. (4)
It is noteworthy to point out that even though these
assumptions are beneficial to tackle the ill-posed na-
ture of color constancy to estimate the color vector
of the light source, assuming that the geometry factor
throughout the scene is uniform and there is a single
light source illuminating the scene are strong assump-
tions which are usually violated in the real world due
to the presence of interreflections, shadows, and mul-
tiple light sources in the scene (Ershov et al., 2023).
2.2 Related Work
Over the decades, numerous global color constancy
algorithms have been proposed. The white-patch
Retinex and the gray world algorithm are well-known
methods, which are inspired by the mechanisms of
the human visual system since the human visual sys-
tem might be discounting the illuminant of the scene
based on the highest luminance patch, and space-
average color (Land, 1977; Buchsbaum, 1980). The
white-patch Retinex method computes the maximum
responses of the image channels separately to esti-
mate the illuminant of the scene, while the gray world
algorithm averages the pixels of each channel inde-
pendently to output an illuminant estimate. These two
methods have been modified and used in several other
studies due to their simplicity and efficacy. For ex-
ample, the shades of gray algorithm assumes that the
mean of pixels raised to a certain power is gray (Fin-
layson and Trezzi, 2004). The gray edge method and
weighted gray edge algorithm stress that the gradi-
ent features of the image are beneficial cues for es-
timating the illuminant of the scene (Van De Weijer
et al., 2007; Gijsenij et al., 2009). The mean-shifted
gray pixel method detects and uses the gray pixels
for illumination estimation (Qian et al., 2018). The
block-based color constancy method divides the im-
age into non-overlapping blocks and transforms the
task of illumination estimation into an optimization
problem by making use of both the gray world and
the white-patch Retinex assumptions (Ulucan et al.,
2022b; Ulucan et al., 2023a; Ulucan et al., 2023b).
The double-opponency-based color constancy algo-
rithm is inspired by the mechanisms of the human
visual system, i.e., physiological findings on color in-
formation processing (Gao et al., 2015). The principal
component analysis-based color constancy method
considers only the informative pixels, which are as-
sumed to be the ones having the largest gradient in
the data matrix, to estimate the color vector of the il-
luminant (Cheng et al., 2014). The local surface re-
flectance statistics algorithm is based on the biolog-
ical findings about the feedback modulation mech-
anism in the eye and the linear image formation
model (Gao et al., 2014). The biologically inspired
color constancy method is based on the hierarchical
structure of the perception mechanism of the human
vision system (Ulucan et al., 2022a).
While most of the aforementioned global color
constancy algorithms are traditional methods, there
also exist learning-based algorithms (Afifi and
Brown, 2019; Laakom et al., 2019; Afifi and Brown,
2020; Afifi et al., 2021; Afifi et al., 2022; Domis-
lovi
´
c et al., 2022). As discussed in several stud-
Investigating Color Illusions from the Perspective of Computational Color Constancy
27

ies, these algorithms outperform classical methods on
well-known benchmarks. However, their effective-
ness tends to decrease when they face images with
different statistical distributions and/or images cap-
tured by cameras with unknown specifications (Gao
et al., 2017; Qian et al., 2019; Ulucan et al., 2022b).
The reason behind this performance decline can be
explained by the facts that (i) well-known bench-
marks are mostly formed with cameras, whose sensor
response characteristics are similar, (ii) illumination
conditions in most datasets do not significantly dif-
fer, for instance, lights outside and on the edges of
the color temperature curve are seldomly considered,
and (iii) learning-based methods expect their training
and test sets to be somehow similar (Ulucan et al.,
2022b; Buzzelli et al., 2023).
The assumption of having a single light source
enables us to estimate the illuminant of the scene,
however, it is usually violated in the real world since
most scenes do not have uniform illumination due
to interreflections, multiple light sources, and shad-
ows (Ebner, 2009; Gijsenij et al., 2011; Bleier et al.,
2011). To avoid this violation both traditional and
learning-based multi-illuminant color constancy algo-
rithms have been proposed. These methods output
local estimates for each spatial location in the im-
age. For instance, local space average color is one
of the first methods, which finds the pixel-wise esti-
mates to arrive at the color constant descriptor of the
scene (Ebner, 2003; Ebner, 2004). The patch-based
methodology and conditional random fields-based al-
gorithm propose strategies, which can be applied to
existing color constancy algorithms (Gijsenij et al.,
2011; Beigpour et al., 2013). The retinal mechanism-
inspired model mimics the color processing mecha-
nisms in a particular retina level and outputs a white-
balanced image without explicitly providing an illu-
mination estimate (Zhang et al., 2016). The image
regional color constancy weighing factors based algo-
rithm separates the image into multiple parts and uses
the normalized average absolute difference of each
part as a measure of confidence (Hussain and Akbari,
2018). The image texture-based algorithm utilizes the
texture to find the pixels, which have adequate color
variation and uses these to discount the illuminant of
the scene (Hussain et al., 2019). The algorithm in-
spired by the human visual system makes use of the
bottom-up and top-down mechanisms to find the color
of the light source (Gao et al., 2019). The grayness
index-based color constancy algorithm finds the gray
pixels based on the dichromatic reflection model and
uses these gray pixels to find both global and local
illumination estimates (Qian et al., 2019). The N-
white balancing method determines the number of
white points in the image to estimate the illuminant
of the scene (Akazawa et al., 2022). The convolu-
tional neural networks (CNNs) based approach con-
tains a detector that can determine the number of il-
luminants present in the scene (Bianco et al., 2017).
The physics-driven and generative adversarial net-
works (GAN) based method models the light source
estimation task as an image-to-image domain transla-
tion problem (Das et al., 2021).
The main drawback of many multi-illuminant
color constancy algorithms is the assignment of the
number of clusters/segments (Wang et al., 2022). In
other words, the provision of the number of illumi-
nants to the algorithm before processing starts. We
argue that in real-world scenarios, where the num-
ber of lights might be unknown or for arbitrary im-
ages for which the number of illuminants is not pro-
vided, algorithms depending on the number of light
sources may not work effectively. Therefore, a multi-
illuminant color constancy approach that can estimate
the illuminants without having the knowledge of the
number of lights is necessary.
3 PROPOSED APPROACH
Global color constancy algorithms estimate the color
vector of a single light source uniformly illuminat-
ing the scene. Therefore, it cannot be expected that
they reproduce our behavior on color assimilation il-
lusions without any modification. Our method modi-
fies the global color constancy algorithms with a sim-
ple yet effective approach so that they provide pixel-
wise estimates of the input image, thus reproduce our
sensation on color assimilation illusions. Since local-
ity is an important feature for both assimilation illu-
sions and multi-illuminant color constancy, our mo-
tivation is that the parameters purely extracted from
the analysis of the color illusions should be beneficial
for color constancy. Our strategy can transform the
global color constancy methods into algorithms that
can provide local estimates of the light source illumi-
nating the scenes.
In our method, we take the linearized input im-
age I and divide it into β × β non-overlapping blocks,
and β is chosen as 8 (the parameter selection is de-
tailed in Sec. 4). After we divide the image into
non-overlapping blocks, we apply a color constancy
algorithm to each block to find the estimate of that
block. Subsequently, rather than assuming that all the
spatial locations in the block have uniform estimates,
we place the computed local estimation into the cen-
ter pixel of the corresponding block and we obtain a
sparsely populated image I
s
(Fig. 2). The reason be-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
28

Input Image Input Target
Sparse Image I
s
Estimates Output Target
Figure 2: Reproduction of color assimilation illusions. As
shown in the input target, the RGB values of the disks are
the same, yet we perceive them in the input image as if they
are different. After we apply our method, as given in the
output target the disks have colors closer to our perception.
hind this operation is to avoid sharp changes between
adjacent blocks, i.e., to obtain smooth transitions be-
tween blocks. Afterward, to fill the missing informa-
tion in I
s
, i.e., to obtain a dense image, we perform
an interpolation between the adjacent center pixels.
The interpolation is carried out by convolving I
s
with
a Gaussian kernel G (Eqn. 5), hence for each spatial
location a pixel-wise estimate is obtained.
I
p
(x, y) = I
s
(x, y) ∗ G(x, y;σ) (5)
where, I
p
contains the pixel-wise estimations normal-
ized to unit norm, ∗ denotes the convolution opera-
tion, and G =
1
2πσ
2
exp
−
x
2
+y
2
2σ
2
. The controlling pa-
rameter σ of G needs to be sufficiently large so that at
least three estimates are inside of the area of support,
hence it is chosen as 24 (discussion on selecting σ is
provided in Sec. 4).
Consequently, our simple yet effective approach
enables us to simulate the behavior of the human vi-
sual system on color assimilation illusions by using
computational color constancy algorithms as shown
in Fig. 2.
It is worth mentioning here that we only modify
the traditional color constancy techniques due to the
input size requirement of the learning-based methods.
In other words, neural networks-based methods need
a fixed input image size, while we use 8 × 8 blocks
in our approach. During our experiments, we have
observed that upsampling the block sizes does not re-
sult in satisfying outcomes, thus we do not apply our
approach to neural networks-based algorithms.
In the remainder of this section, we slightly adjust
our approach for color constancy purposes. While we
make our adjustments, we utilize the parameters, i.e.,
block size and controlling parameter of the Gaussian
kernel, which we extract from our analysis on color
assimilation illusions.
3.1 Application to Color Constancy
After we simulate the behavior of the human visual
system on color assimilation illusions, we analyze
whether the proposed approach relying on parame-
ters purely extracted from color illusions can trans-
form the global color constancy methods into multi-
illumination color constancy algorithms. Also, we in-
vestigate whether our method can improve the per-
formance of the existing color constancy methods on
single illumination conditions.
It is known that not all pixels are beneficial to
perform color constancy, i.e., the performance of al-
gorithms tends to decrease when the images contain
dominant sky regions. Hence, instead of using all
pixels in the images, choosing the most informative
ones increases the efficiency of the color constancy
methods as proposed in several studies (Finlayson
and Hordley, 2001; Yang et al., 2015; Qian et al.,
2018; Ulucan et al., 2023a). Therefore, to adapt our
proposed approach for color assimilation illusions to
color constancy, we form a confidence map by us-
ing the whitest pixels, e.g., pixels having the high-
est luminance in the image. The reason for using the
whitest pixels in the scene can be explained by bio-
logical findings, i.e., our visual system might be dis-
counting the illuminant by making use of the areas
that have the highest luminance rather than the darkest
regions (Land and McCann, 1971; Linnell and Fos-
ter, 1997; Uchikawa et al., 2012; Morimoto et al.,
2021), and from the perspective of digital photogra-
phy, i.e., the illuminant can be determined easier from
the achromatic colored areas such as white regions in
the scene rather than the colored areas (Drew et al.,
2012; Joze et al., 2012; Qian et al., 2019; Ono et al.,
2022; Ulucan et al., 2023a).
To detect the whitest pixels, we take the mean of
each color channel separately and scale the input im-
age according to this color vector. Then, we form a
pixel-wise whiteness map W by computing the pixel-
wise angular error between the scaled image I
temp
and
the white vector w = [1 1 1] as follows;
W (x, y) = cos
−1
w·I
temp
(x,y)
∥
w
∥
∥
I
temp
(x,y)
∥
. (6)
Subsequently, we form the confidence map C by
adaptively weighting W at each spatial location us-
ing a Gaussian curve (Eqn. 7) since the contribution
of the brightest pixels to color constancy may not be
equal throughout the scene. This approach coincides
with the biological findings that brighter regions have
a greater effect on human color constancy than darker
regions (Uchikawa et al., 2012).
C(x, y) =
1
2πσ
2
W
exp
−
(W (x, y) − µ
W
)
2
2σ
2
W
!
(7)
Investigating Color Illusions from the Perspective of Computational Color Constancy
29

where, µ
W
and σ
W
are the mean and the standard
deviation of W , respectively.
The pixel-wise estimates of the light source
ˆ
L
est
are obtained by applying an interpolation similar to
Eqn. 5 as follows;
L
est
(x, y) = (I
s
(x, y) × C (x, y))∗ G(x, y). (8)
In global color constancy benchmarks, the color
of the ground truth light vectors are provided as an
R, G, B triplet. Although our approach provides pixel-
wise estimations, one can obtain a global estimate of
the light source by averaging the pixels in I
s
for each
color channel individually.
4 EXPERIMENTS ON COLOR
ILLUSIONS
In this section, we explain the formation of the color
illusion set and the extraction of the parameters. Sub-
sequently, we discuss our outcomes on the reproduc-
tion of color illusions by using various global color
constancy methods.
4.1 Formation of the Color Illusion Set
The most important two features of color assimilation
illusions that affect our perception are the inducer’s
frequency of occurrence and its thickness. As seen in
Fig. 3, there is no illusion effect in the image given
in the first column. On the other hand, illusion sensa-
tions are observable in the image present in the sec-
ond column. It is important to note that while an-
alyzing the illusions, we recommend zooming in to
the figure and fixating our focal vision on each im-
age individually. The former is recommended since
when the observer views the image as small-sized or
from a distance the image will appear as if its inducer
has sufficient frequency to evoke an illusion sensa-
tion although there is no (or a weak) illusion sensation
present in the image. The latter is advised since our
peripheral vision is locally disordered (Koenderink
and van Doorn, 2000), i.e., blurred. This charac-
teristic feature of the peripheral vision can ease the
perception of color assimilation illusions, i.e., even a
very weak illusion effect can be perceived as a strong
illusion sensation, since in color assimilation illusions
the color of the target region shifts towards that of its
local neighbors.
During the formation of our illusion set, we se-
lected color assimilation illusions with various shapes
and colors by considering the inducer’s frequency of
occurrence and its thickness. We do not include im-
ages that have no illusion effect, since it is not mean-
Figure 3: Evoking an illusion sensation highly depends on
the inducer’s characteristics. As given in the first column,
the image having a low inducer frequency and a large in-
ducer thickness does not evoke an illusion sensation. How-
ever, the illusion sensation is easily observable when we in-
crease the frequency and decrease the thickness of the in-
ducer as given in the second column.
Figure 4: Example assimilation illusions with different
shapes and colors used in algorithm design (Ulucan et al.,
2022a; Bach, 2023; Kitaoka, 2023).
ingful to reproduce images that do not cause an il-
lusion sensation. Thus, we create a set containing a
range of images that start to evoke an illusion sensa-
tion to images with a strong illusion effect (Fig. 4).
4.2 Discussion on Color Illusions
After we form our set, we extract the block size β
and the controlling parameter of the Gaussian ker-
nel σ by analyzing the reproduction of distinct color
assimilation illusions having various shapes, inducer
frequencies, and colors via computational color con-
stancy algorithms. While analyzing the reproduction,
we prefer to carry out a visual investigation by tak-
ing the intensities of the pixels in the target regions
into account since there is no error metric designed
for this task. The lack of an objective quantitative
evaluation method is not surprising, since color illu-
sions are a sensation and sensations cannot be quanti-
tatively measured. In other words, distinct observers
do not perceive illusions entirely the same even if we
only consider observers with a normal vision since the
sensory processing of individuals differs from each
other (Emery and Webster, 2019), i.e., even if dis-
tinct observers perceive a target as blue, the perceived
shade of blue may differ between individuals, which
is why studies mimicking illusions usually provide
the intensity change within the target image (Marini
and Rizzi, 2000; Funt et al., 2004; Corney and Lotto,
2007). It is worth mentioning that while we cannot
measure sensations quantitatively, the closest alterna-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
30
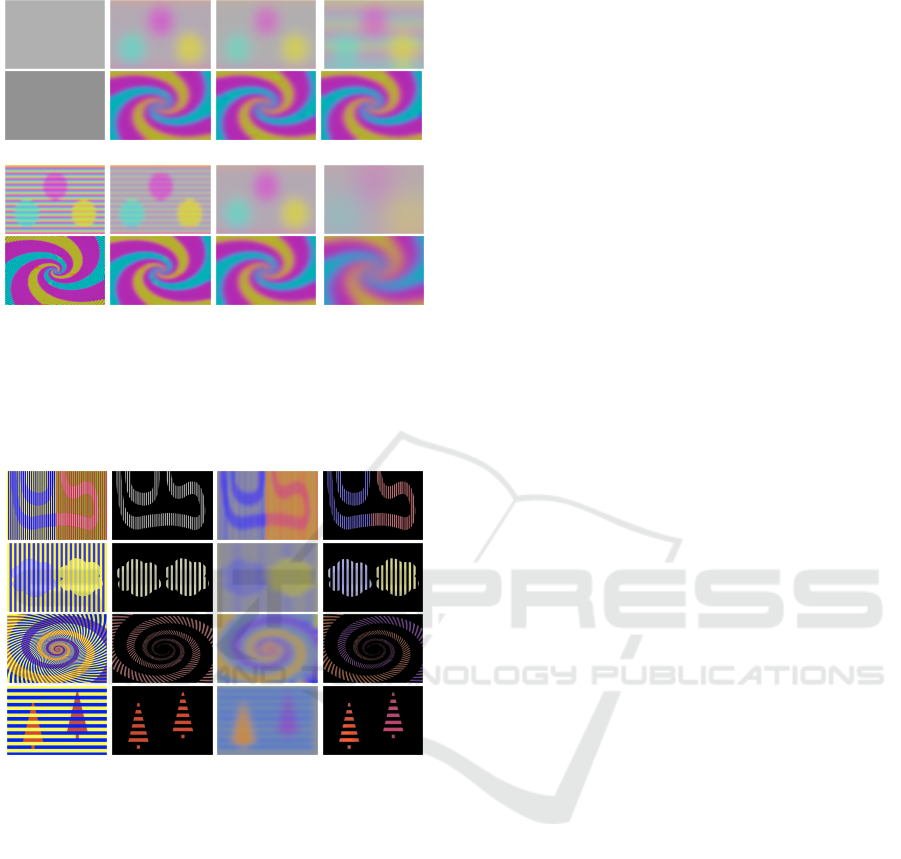
β = 2 β = 8 β = 16 β = 32
σ = 4 σ = 16 σ = 24 σ = 48
Figure 5: Examples of the parameter selection procedure
with several combinations on different illusions. Exper-
iments are carried out with different parameter combina-
tions, and the parameters that work best on all illusions on
average are chosen. This analysis is performed by visual
analysis since there is no quantitative method for this task.
Input Image Input Target Estimates Output Target
Figure 6: Results of the proposed approach with different
methods. (Top-to-bottom) The results of gray world, white-
patch Retinex, shades of gray, and gray edge.
tive to provide quantitative measurements might be
to conduct experiments similar to color-matching ex-
periments with observers. In these experiments, the
observers might be asked to match the target’s colors
they perceive with a test patch whose RGB triplet can
be controlled by the observers. Thus, ground truth im-
ages can be obtained for illusions, which can be used
for the evaluations. Nevertheless, performing such
experiments and forming a dataset containing ground
truths is beyond the scope of this work.
The key point in selecting parameters is that they
have to be chosen so that they are able to mimic our
sensation on images having both weak and strong illu-
sion sensations. Thus, the inducer’s frequency range
is limited to the interval where we can create illusions.
As presented in Fig. 5, the best results are obtained
when we take the block size as 8 × 8. Smaller block
sizes are generally not able to produce satisfying re-
sults when our approach is applied with certain color
constancy algorithms. This is not surprising since
color constancy algorithms depend on image statis-
tics, thus, the block size cannot be too small, since ap-
plying a color constancy algorithm to a small number
of pixels could violate their assumptions, i.e., the gray
world method is only valid when there is a sufficient
number of different colors present in the scene (Ebner,
2009). On the other hand, when we consider larger
block sizes, our sensation on color assimilation illu-
sions cannot be accurately reproduced, i.e., the shapes
and textures degrade, since the locality has to be pre-
served for color illusions (Ulucan et al., 2022a).
Similar to the block size, σ cannot be too large in
order to preserve locality. As the block size, the con-
trolling parameter is determined by visually analyz-
ing the pixel-wise estimates instead of only consider-
ing the target regions, since alongside reproducing the
colors we perceive, it is also important to preserve the
shapes of the target regions in the illusions (Fig. 5).
Therefore, while in Fig. 5 more than one parameter
may seem a proper choice, we need to select the suit-
able parameter combination that reproduces the col-
ors we perceive as close as possible without damag-
ing the shapes when all different color illusions in our
set are considered. Thereupon, we determined σ as
24 which is 3 times β indicating that at least three es-
timations should fall inside the area of support.
We present the results of our approach with dif-
ferent global color constancy methods on color as-
similation illusions in Fig. 6. From the examples,
it is observable that with our modification, computa-
tional color constancy algorithms are able to respond
to color illusions similar to the human visual system.
Our approach transforms algorithms so that they can
provide accurate pixel-wise estimations for illusions.
5 EXPERIMENTS FOR COLOR
CONSTANCY
In this section, we present our experimental setup and
results on color constancy, while we also show that
the parameters selected purely from color assimila-
tion illusions provide the best statistical outcomes on
a multi-illuminant color constancy benchmark.
5.1 Experimental Setup
5.1.1 Algorithms
We investigate the effect of our approach on both
multi-illuminant and global color constancy. We
Investigating Color Illusions from the Perspective of Computational Color Constancy
31

compare our outcomes with the following algo-
rithms; white-patch Retinex (Land, 1977), gray
world (Buchsbaum, 1980), shades of gray (Fin-
layson and Trezzi, 2004), 1
st
order gray edge (Van
De Weijer et al., 2007), weighted gray edge (Gi-
jsenij et al., 2009), double-opponent cells based
color constancy (Gao et al., 2015), PCA based
color constancy (Cheng et al., 2014), color con-
stancy with local surface reflectance estimation (Gao
et al., 2014), mean shifted gray pixels (Qian et al.,
2018), gray pixels (Qian et al., 2019), block-based
color constancy (Ulucan et al., 2022b), biologi-
cally inspired color constancy (Ulucan et al., 2022a),
color constancy convolutional autoencoder (Laakom
et al., 2019), sensor-independent illumination esti-
mation (Afifi and Brown, 2019), cross-camera con-
volutional color constancy (Afifi et al., 2021), local
space average color (Ebner, 2003), Gijsenij et al. (Gi-
jsenij et al., 2011), conditional random fields (Beig-
pour et al., 2013), N-white balancing (Akazawa et al.,
2022), visual mechanism based color constancy (Gao
et al., 2019), retinal inspired color constancy (Zhang
et al., 2016), color constancy weighting factors (Hus-
sain and Akbari, 2018), color constancy adjustment
based on texture of image (Hussain et al., 2019), GAN
based color constancy (Das et al., 2021), and CNNs
based color constancy (Bianco et al., 2017). While
all traditional methods, whose codes are available are
utilized without any modification or optimization, the
results of the remaining algorithms are reported based
on the publications of these works.
5.1.2 Datasets
To benchmark our technique on images captured un-
der multiple light sources, we choose the Multiple Il-
luminant and Multiple Object (MIMO) dataset (Beig-
pour et al., 2013), one of the most notable multi-
illuminant datasets in the field of computational
color constancy, since many algorithms have al-
ready been benchmarked on this dataset (Buzzelli
et al., 2023). The MIMO dataset contains scenes,
which are taken under controlled illumination con-
ditions, and their pixel-wise ground truths. To test
our approach on images captured under global il-
lumination conditions, we use two color constancy
datasets; Recommended ColorChecker and INTEL-
TAU datasets (Hemrit et al., 2018; Laakom et al.,
2021). The Recommended ColorChecker dataset is
the modified version of the Gehler-Shi dataset (Gehler
et al., 2008). It contains indoor and outdoor scenes,
which are captured with two different capturing de-
vices. The INTEL-TAU dataset is one of the recent
color constancy benchmarks containing both indoor
and outdoor images, which are captured with three
Table 1: Analysis of the parameters on the MIMO dataset.
The mean of the pixel-wise angular error between the esti-
mates and the ground truth is provided. The best combina-
tion is highlighted. The parameter combinations that are se-
lected from color illusions work better for color constancy.
Scaling Factor σ
2 4 8 12 16 20 24 28 32 48
Block Size β
4 4.828 4.374 4.058 3.929 3.875 3.859 3.859 3.865 3.874 3.918
8 4.807 4.281 3.883 3.735 3.677 3.659 3.658 3.666 3.675 3.721
12 4.897 4.450 4.004 3.821 3.737 3.706 3.701 3.705 3.713 3.746
16 4.932 4.591 4.100 3.894 3.804 3.763 3.748 3.749 3.758 3.819
20 4.918 4.692 4.255 4.052 3.954 3.905 3.882 3.871 3.867 3.867
24 4.964 4.770 4.335 4.104 3.998 3.948 3.931 3.928 3.931 3.968
28 4.973 4.927 4.458 4.173 4.014 3.928 3.884 3.859 3.845 3.842
32 5.083 5.042 4.599 4.322 4.155 4.054 3.989 3.949 3.924 3.895
48 4.969 5.481 4.759 4.583 4.424 4.303 4.212 4.144 4.091 3.954
different cameras. During the evaluation, images cap-
tured with different cameras are combined to form a
single set since it is crucial to test the algorithms with
images, whose spectral distribution is unknown.
5.1.3 Error Metric
To quantitatively evaluate the modified version of the
color constancy algorithms, we use the angular error
which is a standardized error metric in the field of
color constancy. The angular error (ε) between the
ground truth light source (L
gt
) and the estimated illu-
minant (L
est
) can be calculated as follows;
ε(L
gt
, L
est
) = cos
−1
L
gt
L
est
∥
L
gt
∥
∥
L
est
∥
. (9)
We report the mean and the median of the errors
for the multi-illuminant cases, while we report the
mean, the median, the best 25%, the worst 25%, and
the maximum of the angular error for the global cases.
5.2 Discussion on Color Constancy
First of all, we provide an analysis of the param-
eters selected during the investigation of color illu-
sions to show that these parameters also give the
best outcomes for multi-illuminant color constancy
(Table 1). The best results on the MIMO dataset
are obtained when β is chosen as 8, and σ is set
to 24 as in the reproduction of color illusions. The
fact that the parameters obtained purely by analyz-
ing color assimilation illusions provide also the best
results on a multi-illuminant color constancy bench-
mark underlines the link between color illusions and
multi-illuminant color constancy which implies that
these two phenomena should be further investigated
together as we argue.
After we investigate the parameters obtained from
illusions, we analyze our method’s effectiveness on
color constancy benchmarks. The method we devel-
oped based on our observations on color assimila-
tion illusions is able to transform global color con-
stancy methods into algorithms, which can provide
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
32
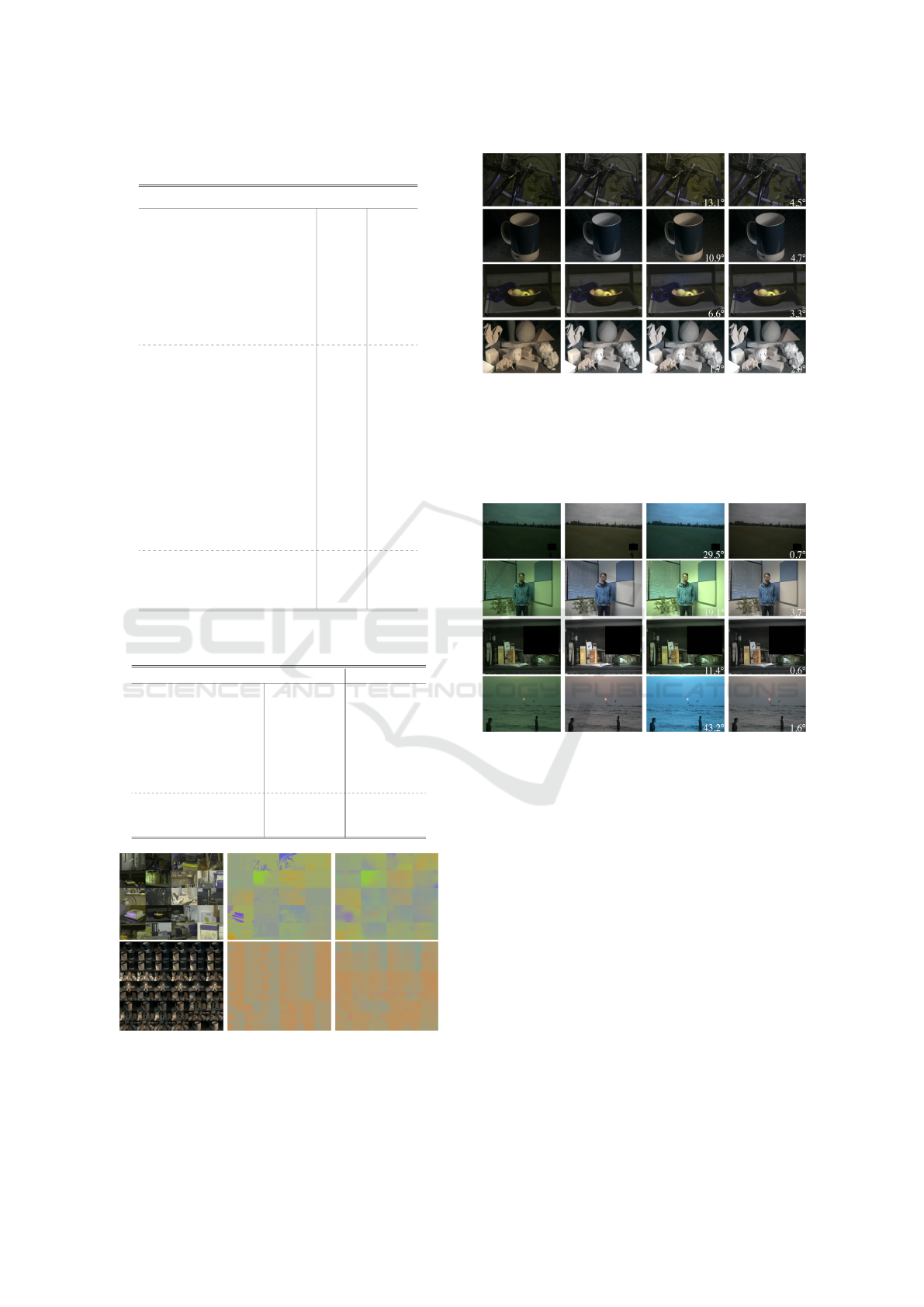
Table 2: Statistical results on the MIMO dataset. For each
metric, the top three results are highlighted.
Real-World Laboratory
Algorithms Mean Median Mean Median
Single-Illuminant Algorithms
White-Patch Retinex 6.8 5.7 7.8 7.6
Gray World 5.3 4.3 3.5 2.9
Shades of Gray 6.2 3.7 4.9 4.6
1
st
order Gray Edge 8.0 4.7 4.3 4.1
Weighted Gray Edge 7.9 4.1 4.4 4.0
Double-Opponent Cells based Color Constancy 7.9 5.0 4.6 4.4
PCA based Color Constancy 7.7 3.5 4.1 3.8
Local Surface Reflectance Estimation 4.9 3.8 3.9 3.5
Mean Shifted Gray Pixels 5.8 5.0 13.3 12.6
Block-based Color Constancy 4.8 3.6 3.1 2.8
Biologically Inspired Color Constancy 5.0 4.3 4.2 4.1
Color Constancy Convolutional Autoencoder 12.4 12.3 13.9 14.1
Sensor-Independent Color Constancy 5.9 5.1 9.0 9.0
Cross-Camera Convolutional Color Constancy 11.9 13.0 7.0 7.1
Multi-Illuminant Algorithms
Local Space Average Color 4.9 4.2 2.7 2.5
Gijsenij et al. with White-Patch Retinex 4.2 3.8 5.1 4.2
Gijsenij et al. with Gray-World 4.4 4.3 6.4 5.9
Gijsenij et al. with 1
st
order Gray-Edge 9.1 9.2 4.8 4.2
Conditional Random Fields with White-Patch Retinex 4.1 3.3 3.0 2.8
Conditional Random Fields with Gray-World 3.7 3.4 3.1 2.8
Conditional Random Fields with 1
st
order Gray-Edge 4.0 3.4 2.7 2.6
N-White Balancing with White-Patch Retinex 4.1 3.4 2.6 2.2
N-White Balancing with Gray World 4.6 4.5 3.7 3.1
N-White Balancing with Shades of Gray 4.2 3.8 2.8 2.3
N-White Balancing with 1
st
order Gray Edge 4.7 3.6 2.5 2.2
Visual Mechanism based Color Constancy with Bottom-Up 5.0 4.0 3.7 3.4
Visual Mechanism based Color Constancy with Top-Down 3.8 2.9 2.8 2.8
Retinal Inspired Color Constancy 5.2 4.3 3.2 2.7
Color Constancy Weighting Factors 3.8 3.8 1.6 1.5
Color Constancy Adjustment based on Texture of Image 3.8 3.8 2.6 2.6
Gray Pixels with 2 clusters 3.7 3.3 3.0 2.5
Gray Pixels with 4 clusters 3.9 3.4 2.7 2.2
Gray Pixels with 6 clusters 3.9 3.4 2.6 2.1
CNNs-based Color Constancy 3.3 3.1 2.3 2.2
GAN-based Color Constancy 3.5 2.9 - -
Proposed w/ White-Patch Retinex 3.6 2.9 2.8 2.5
Proposed w/ Gray World 3.9 3.5 2.9 2.7
Proposed w/ Shades of Gray 3.7 2.9 2.9 2.6
Proposed w/ 1
st
order Gray Edge 3.9 3.3 2.8 2.5
Proposed w/ Weighted Gray Edge 3.8 3.3 2.8 2.5
Proposed w/ Double-Opponent Cells based Color Constancy 3.8 3.2 2.9 2.7
Table 3: Statistical results on global color constancy
datasets. The top three results are highlighted.
RECommended ColorChecker INTEL-TAU
Algorithms Mean Median B.25% W.25% Max. Mean Median B.25% W.25% Max.
White-Patch Retinex 10.2 9.1 1.6 20.4 50.5 11.0 13.2 1.8 19.4 43.2
Gray World 4.7 3.6 0.9 10.4 24.8 4.9 3.9 1.0 10.6 31.0
Shades of Gray 5.8 4.2 0.7 13.7 32.4 5.5 4.2 1.0 12.3 35.6
1
st
order Gray Edge 6.4 3.8 0.9 15.8 37.2 6.1 4.2 1.0 14.3 50.7
Weighted Gray Edge 6.1 3.3 0.7 15.5 33.2 6.0 3.6 0.8 14.9 38.9
Double-Opponent Cells based Color Constancy 7.2 4.2 0.7 18.0 48.5 7.2 4.7 0.8 17.0 49.4
PCA based Color Constancy 4.1 2.5 0.5 10.1 28.7 4.5 3.0 0.7 10.6 36.8
Local Surface Reflectance Estimation 4.7 3.7 1.5 9.7 23.5 4.2 3.4 1.0 8.6 31.4
Mean Shifted Gray Pixels 3.8 2.9 0.7 8.3 19.4 3.6 2.6 0.6 8.2 37.6
Gray Pixels 3.1 1.9 0.4 8.0 28.7 3.3 2.2 0.5 8.0 31.5
Biologically Inspired Color Constancy 4.4 3.3 0.8 9.8 23.4 4.1 3.1 0.7 9.4 31.5
Block-based Color Constancy 3.8 3.1 1.4 7.3 20.5 4.2 3.6 1.2 8.5 23.9
Color Constancy Convolutional Autoencoder 2.1 1.9 0.8 4.0 - 3.4 2.7 0.9 7.0 -
Sensor-Independent Color Constancy 2.7 1.9 0.5 6.5 - 3.4 2.4 0.7 7.8 -
Cross-Camera Convolutional Color Constancy 2.5 1.9 0.5 5.4 - 2.5 1.7 0.5 5.9 -
Proposed w/ White-Patch Retinex 3.7 3.2 1.1 7.5 17.9 3.9 3.0 0.9 8.2 31.2
Proposed w/ Gray World 4.2 3.5 0.9 8.7 19.5 4.2 3.2 0.8 9.2 32.0
Proposed w/ Shades of Gray 4.0 3.4 0.9 8.3 19.0 4.0 3.1 0.7 8.9 32.0
Proposed w/ 1
st
order Gray Edge 4.1 3.4 0.9 8.4 19.2 4.1 3.1 0.7 9.0 31.9
Proposed w/ Weighted Gray Edge 4.0 3.4 0.9 8.4 19.2 4.1 3.1 0.7 9.0 31.9
Proposed w/ Double-Opponent Cells based Color Constancy 4.0 3.4 1.0 8.3 19.0 4.0 3.0 0.7 8.8 31.6
Figure 7: Results on MIMO dataset, the top row contains
scenes from the real-world set, and the bottom row shows
images from the laboratory set. (Left-to-right) The input
scenes, ground truths, and pixel-wise estimations via the
proposed approach with white-patch Retinex.
Figure 8: Random examples from the MIMO dataset. (First
two rows: Left-to-right) Input, ground truth, the result
of white-patch Retinex, and proposed method with white-
patch Retinex. (Last two rows: Left-to-right) Input, ground
truth, the result of gray pixels, and proposed method with
shades of gray. Errors are given at the bottom right corner
of the images.
Figure 9: Random worst case examples from global
datasets. (First two rows: Left-to-right) Input, ground
truth, the result of double-opponent cells based color con-
stancy and proposed method with double-opponent cells
based color constancy. (Last two rows: Left-to-right) In-
put, ground truth, the result of white-patch Retinex and pro-
posed method with white-patch Retinex. Errors are given at
the bottom right corner of the images.
pixel-wise illumination estimates (Table 2). As we
mentioned, our method does not rely on prior infor-
mation or utilize any learning-based techniques, i.e.,
clustering or segmentation methods. We see the in-
dependence of prior information and having no re-
quirement for a high amount of data as an advan-
tage of our method. Since as pointed out in several
color constancy studies we usually cannot have infor-
mation about the number of illuminants illuminating
the scene, and for multi-illuminant color constancy, it
is very challenging to form a large-scale dataset with
ground truth illumination (Gijsenij et al., 2011; Das
et al., 2021).
Investigating Color Illusions from the Perspective of Computational Color Constancy
33

The results of our experiments coincide with our
discussion that the relationship between color assim-
ilation illusions and color constancy should be taken
into account. A simple approach that can reproduce
our sensation on color assimilation illusions is able to
output pixel-wise estimates for multi-illuminant color
constancy (Fig. 7). The modified algorithms utilizing
the parameters obtained from color illusions present
very competitive results when compared with meth-
ods particularly designed for multi-illuminant color
constancy (Fig. 8), while they clearly outperform sev-
eral of them, i.e., the proposed approach with white-
patch Retinex is able to outperform most of the al-
gorithms specifically designed for multi-illuminant
purposes. Another noteworthy outcome is that our
proposed approach enhances existing algorithms with
more efficiency on the real-world set on average com-
pared to other similar strategies such as Gijsenij et
al., conditional random fields, and N-white balanc-
ing (Table 2). For the laboratory set, our outcomes do
not produce the best results but they are competitive.
The reason behind this can be explained by the block
size and controlling parameter of the Gaussian ker-
nel of our approach. These parameters are determined
by investigating color assimilation illusions that con-
tain frequent color changes as the real-world set of
the MIMO dataset. On the other hand laboratory im-
ages do not contain as much complexity as real-world
scenes (Fig. 7). We would like to emphasize that our
learning-free approach is able to output competitive
results when compared to learning-based algorithms.
Also, it is important to note here that the GAN-based
model which has the second-best results on average
on the MIMO dataset, uses the illuminants from the
MIMO dataset during training.
One might think that color assimilation illusions
and global color constancy are not directly related
since global color constancy algorithms provide only
a single RGB triplet rather than pixel-wise estimates.
Yet, as we argued, our approach for reproducing the
behavior of the human visual system on color illu-
sions is able to improve the outcomes of algorithms as
presented in Table 3. The mean angular errors of the
algorithms we modified are able to compete with the
state-of-the-art. Furthermore, the errors of the worst
cases decrease substantially, especially for the algo-
rithms using the maximum intensities as illumination
estimates of the scene (Fig. 9). Additionally, the low-
est errors for the worst cases are obtained via our ap-
proach on both benchmarks. As pointed out in color
constancy studies it is important to enhance the out-
comes for the most difficult cases.
As a final note, even though we extract hard pa-
rameters and use them to modify learning-free ap-
proaches, we are able to improve the methods’ effi-
ciency significantly. This outcome might indicate that
easily producible color assimilation illusions might be
used as input data to train the learning-based color
constancy models for mixed-illumination conditions.
Since the generated illusions will be free from the
sensor specifications of the capturing device, they
might prevent some of the current challenges of the
learning-based models and benchmarks, i.e., data bias
due to the camera sensor specifications and the type
of illuminant (Ulucan et al., 2022b; Buzzelli et al.,
2023). When we consider the outcomes of this work,
we may deduce that color assimilation illusions are
valuable tools for color constancy, hence the connec-
tion between these two phenomena should be further
investigated minutely. This investigation might lead
us to design more robust models aiming at mimicking
the abilities of the human visual system.
6 CONCLUSION
Color illusions and computational color constancy are
two phenomena that can help us to reveal the struc-
ture of the brain, and design artificial systems that are
one step closer to mimicking the human visual sys-
tem. In this study, we investigated color illusions from
the perspective of computational color constancy to
find out what we can learn from the link between
these two phenomena. We argued that if we de-
sign an approach that can reproduce the behavior of
the human visual system on color illusions by utiliz-
ing global color constancy algorithms, this approach
cannot only transform global color constancy meth-
ods into multi-illuminant color constancy algorithms
but also increase their performance on single illumi-
nant benchmarks. Thereupon, we have developed a
simple yet effective method by making use of global
color constancy algorithms to reproduce the behav-
ior of the human visual system on color assimila-
tion illusions. After we investigated color illusions,
we used our findings to see whether our argument
is valid or not. According to the experiments, our
method is able to transform global color constancy al-
gorithms into multi-illuminant color constancy algo-
rithms, which produce competitive results compared
to the state-of-the-art without requiring any prior in-
formation about the scene. Also, the effectiveness
of global color constancy algorithms modified by our
approach increases significantly in single illuminant
color constancy benchmarks especially for the worst
cases, compared to the original versions of the algo-
rithms. From our findings, we suggest that these two
phenomena should be further investigated together
while taking more color illusions into account.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
34

REFERENCES
Afifi, M., Barron, J. T., LeGendre, C., Tsai, Y.-T., and
Bleibel, F. (2021). Cross-camera convolutional color
constancy. In Int. Conf. Comput. Vision, pages 1981–
1990, Montreal, QC, Canada. IEEE/CVF.
Afifi, M. and Brown, M. S. (2019). Sensor-independent illu-
mination estimation for DNN models. In Brit. Mach.
Vision Conf., Cardiff, UK. BMVA Press.
Afifi, M. and Brown, M. S. (2020). Deep white-balance
editing. In Conf. Comput. Vision Pattern Recognit.,
pages 1397–1406, Seattle, WA, USA. IEEE/CVF.
Afifi, M., Brubaker, M. A., and Brown, M. S. (2022). Auto
white-balance correction for mixed-illuminant scenes.
In Winter Conf. Appl. Comput. Vision, pages 1210–
1219, Waikoloa, HI, USA. IEEE/CVF.
Akazawa, T., Kinoshita, Y., Shiota, S., and Kiya, H. (2022).
N-white balancing: White balancing for multiple il-
luminants including non-uniform illumination. IEEE
Access, 10:89051–89062.
Bach, M. (Last accessed: 18.02.2023). Color assimilation
illusions. michaelbach.de/ot.
Bach, M. and Poloschek, C. M. (2006). Optical illusions.
Adv. Clin. Neurosci. Rehabil., 6(2):20–21.
Beigpour, S., Riess, C., Van De Weijer, J., and An-
gelopoulou, E. (2013). Multi-illuminant estimation
with conditional random fields. IEEE Trans. Image
Process., 23:83–96.
Bianco, S., Cusano, C., and Schettini, R. (2017). Sin-
gle and multiple illuminant estimation using convolu-
tional neural networks. IEEE Trans. Image Process.,
26(9):4347–4362.
Bleier, M., Riess, C., Beigpour, S., Eibenberger, E., An-
gelopoulou, E., Tr
¨
oger, T., and Kaup, A. (2011). Color
constancy and non-uniform illumination: Can existing
algorithms work? In IEEE Int. Conf. Comput. Vision
Workshops, pages 774–781. IEEE.
Brainard, D. H., Long
`
ere, P., Delahunt, P. B., Freeman,
W. T., Kraft, J. M., and Xiao, B. (2006). Bayesian
model of human color constancy. J. Vision, 6(11):10–
10.
Brainard, D. H. and Radonjic, A. (2004). Color constancy.
The Visual Neurosciences, 1:948–961.
Buchsbaum, G. (1980). A spatial processor model for object
colour perception. J. Franklin Inst., 310:1–26.
Buzzelli, M., Zini, S., Bianco, S., Ciocca, G., Schettini, R.,
and Tchobanou, M. K. (2023). Analysis of biases in
automatic white balance datasets and methods. Color
Res. Appl., 48(1):40–62.
Cheng, D., Prasad, D. K., and Brown, M. S. (2014). Illu-
minant estimation for color constancy: Why spatial-
domain methods work and the role of the color distri-
bution. J. Opt. Soc. America A, 31:1049–1058.
Corney, D. and Lotto, R. B. (2007). What are lightness
illusions and why do we see them? PLoS Comput.
Biol., 3(9):e180.
Das, P., Liu, Y., Karaoglu, S., and Gevers, T. (2021).
Generative models for multi-illumination color con-
stancy. In Conf. Comput. Vision Pattern Recognit.,
pages 1194–1203, Montreal, BC, Canada. IEEE/CVF.
Dixon, E. L. and Shapiro, A. G. (2017). Spatial filtering,
color constancy, and the color-changing dress. J. Vi-
sion, 17(3):7–7.
Domislovi
´
c, I., Vr
ˇ
snak, D., Suba
ˇ
si
´
c, M., and Lon
ˇ
cari
´
c, S.
(2022). One-net: Convolutional color constancy sim-
plified. Pattern Recognit. Letters, 159:31–37.
Drew, M. S., Joze, H. R. V., and Finlayson, G. D. (2012).
Specularity, the zeta-image, and information-theoretic
illuminant estimation. In Workshops Demonstrations:
Eur. Conf. Comput. Vision, pages 411–420, Florence,
Italy. Springer.
Ebner, M. (2003). Combining white-patch retinex and the
gray world assumption to achieve color constancy for
multiple illuminants. In Joint Pattern Recognit. Symp.,
pages 60–67, Magdeburg, Germany. Springer.
Ebner, M. (2004). A parallel algorithm for color constancy.
J. Parallel Distrib. Comput., 64:79–88.
Ebner, M. (2007). Color Constancy, 1st ed. Wiley Publish-
ing, ISBN: 0470058299.
Ebner, M. (2009). Color constancy based on local space
average color. Mach. Vision Appl., 20(5):283–301.
Ebner, M. (2011). On the effect of scene motion on color
constancy. Biol. Cybern., 105(5):319–330.
Emery, K. J. and Webster, M. A. (2019). Individual dif-
ferences and their implications for color perception.
Current Opinion Behavioral Sciences, 30:28–33.
Ershov, E., Tesalin, V., Ermakov, I., and Brown, M. S.
(2023). Physically-plausible illumination distribu-
tion estimation. In Int. Conf. Comput. Vision, pages
12928–12936. IEEE/CVF.
Finlayson, G. D. and Hordley, S. D. (2001). Color con-
stancy at a pixel. J. Opt. Soc. America A, 18(2):253–
264.
Finlayson, G. D. and Trezzi, E. (2004). Shades of gray and
colour constancy. In Color and Imag. Conf., pages 37–
41, Scottsdale, AZ, USA. Society for Imaging Science
and Technology.
Funt, B. V., Ciurea, F., and McCann, J. J. (2004). Retinex
in matlab™. J. Electron. Imag., 13(1).
Gao, S., Han, W., Yang, K., Li, C., and Li, Y. (2014). Ef-
ficient color constancy with local surface reflectance
statistics. In Eur. Conf. Comput. Vision, pages 158–
173, Zurich, Switzerland. Springer.
Gao, S., Zhang, M., Li, C., and Li, Y. (2017). Improv-
ing color constancy by discounting the variation of
camera spectral sensitivity. J. Opt. Soc. America A,
34:1448–1462.
Gao, S.-B., Ren, Y.-Z., Zhang, M., and Li, Y.-J. (2019).
Combining bottom-up and top-down visual mecha-
nisms for color constancy under varying illumination.
IEEE Trans. Image Process., 28(9):4387–4400.
Gao, S.-B., Yang, K.-F., Li, C.-Y., and Li, Y.-J.
(2015). Color constancy using double-opponency.
IEEE Transactions Pattern Anal. Mach. Intell.,
37(10):1973–1985.
Gegenfurtner, K. R. (1999). Reflections on colour con-
stancy. Nature, 402(6764):855–856.
Gehler, P. V., Rother, C., Blake, A., Minka, T., and Sharp, T.
(2008). Bayesian color constancy revisited. In Conf.
Investigating Color Illusions from the Perspective of Computational Color Constancy
35

Comput. Vision Pattern Recognit., pages 1–8, Anchor-
age, AK, USA. IEEE.
Gijsenij, A., Gevers, T., and Van De Weijer, J. (2009).
Physics-based edge evaluation for improved color
constancy. In Conf. Comput. Vision Pattern Recognit.,
pages 581–588, Miami, FL, USA. IEEE.
Gijsenij, A., Lu, R., and Gevers, T. (2011). Color constancy
for multiple light sources. IEEE Trans. Image Pro-
cess., 21(2):697–707.
Gomez-Villa, A., Martin, A., Vazquez-Corral, J., and
Bertalm
´
ıo, M. (2019). Convolutional neural networks
can be deceived by visual illusions. In Conf. Comput.
Vision Pattern Recognit., pages 12309–12317, Long
Beach, CA, USA. IEEE/CVF.
Hemrit, G., Finlayson, G. D., Gijsenij, A., Gehler, P.,
Bianco, S., Funt, B., Drew, M., and Shi, L. (2018). Re-
habilitating the colorchecker dataset for illuminant es-
timation. In Color Imag. Conf., pages 350–353, Van-
couver, BC, Canada. Society for Imaging Science and
Technology.
Hurlbert, A. (2007). Colour constancy. Current Biology,
17(21):R906–R907.
Hussain, M. A. and Akbari, A. S. (2018). Color constancy
algorithm for mixed-illuminant scene images. IEEE
Access, 6:8964–8976.
Hussain, M. A., Akbari, A. S., and Halpin, E. A. (2019).
Color constancy for uniform and non-uniform illu-
minant using image texture. IEEE Access, 7:72964–
72978.
Joze, H. R. V., Drew, M. S., Finlayson, G. D., and Rey, P.
A. T. (2012). The role of bright pixels in illumination
estimation. In Color Imag. Conf., pages 41–46, Los
Angeles, CA, USA. Society for Imaging Science and
Technology.
Kitaoka, A. (Last accessed: 18.02.2023). Color illusions.
ritsumei.ac.jp/ akitaoka/index-e.html.
Koenderink, J. J. and van Doorn, A. J. (2000). Blur and
disorder. J. Visual Communication Image Representa-
tion, 11(2):237–244.
Laakom, F., Raitoharju, J., Iosifidis, A., Nikkanen, J., and
Gabbouj, M. (2019). Color constancy convolutional
autoencoder. In Symp. Ser. Comput. Intell., pages
1085–1090, Xiamen, China. IEEE.
Laakom, F., Raitoharju, J., Nikkanen, J., Iosifidis, A., and
Gabbouj, M. (2021). Intel-tau: A color constancy
dataset. IEEE Access, 9:39560–39567.
Land, E. H. (1977). The retinex theory of color vision. Sci-
entific Amer., 237:108–129.
Land, E. H. and McCann, J. J. (1971). Lightness and retinex
theory. J. Opt. Soc. America A, 61(1):1–11.
Linnell, K. J. and Foster, D. H. (1997). Space-average scene
colour used to extract illuminant information. John
Dalton’s Colour Vision Legacy, pages 501–509.
Marini, D. and Rizzi, A. (1997). A computational approach
to color illusions. In Int. Conf. Image Anal. Process,
pages 62–69, Florence, Italy. Springer.
Marini, D. and Rizzi, A. (2000). A computational approach
to color adaptation effects. Image Vision Comput.,
18(13):1005–1014.
Morimoto, T., Kusuyama, T., Fukuda, K., and Uchikawa,
K. (2021). Human color constancy based on the ge-
ometry of color distributions. J. Vision, 21(3):7–7.
Ono, T., Kondo, Y., Sun, L., Kurita, T., and Moriuchi,
Y. (2022). Degree-of-linear-polarization-based color
constancy. In Conf. Comput. Vision Pattern Recog-
nit., pages 19740–19749, New Orleans, LA, USA.
IEEE/CVF.
Qian, Y., Kamarainen, J.-K., Nikkanen, J., and Matas, J.
(2019). On finding gray pixels. In Conf. Com-
put. Vision Pattern Recognit., pages 8062–8070, Long
Beach, CA, USA. IEEE/CVF.
Qian, Y., Pertuz, S., Nikkanen, J., K
¨
am
¨
ar
¨
ainen, J.-K.,
and Matas, J. (2018). Revisiting gray pixel for
statistical illumination estimation. arXiv preprint
arXiv:1803.08326.
Sheth, B. R. and Young, R. (2016). Two visual pathways
in primates based on sampling of space: exploitation
and exploration of visual information. Frontiers Inte-
grative Neuroscience, 10:37.
Uchikawa, K., Fukuda, K., Kitazawa, Y., and MacLeod,
D. I. (2012). Estimating illuminant color based on lu-
minance balance of surfaces. J. Opt. Soc. America A,
29(2):A133–A143.
Ulucan, O., Ulucan, D., and Ebner, M. (2022a). BIO-CC:
Biologically inspired color constancy. In Brit. Mach.
Vision Conf., London, UK. BMVA Press.
Ulucan, O., Ulucan, D., and Ebner, M. (2022b). Color
constancy beyond standard illuminants. In Int. Conf.
Image Process., pages 2826–2830, Bordeaux, France.
IEEE.
Ulucan, O., Ulucan, D., and Ebner, M. (2023a). Block-
based color constancy: The deviation of salient pixels.
In Int. Conf. Acoust. Speech Signal Process., pages 1–
5, Rhodes Island, Greece. IEEE.
Ulucan, O., Ulucan, D., and Ebner, M. (2023b). Multi-scale
color constancy based on salient varying local spatial
statistics. Vis. Comput., pages 1–17.
Van De Weijer, J., Gevers, T., and Gijsenij, A. (2007). Edge-
based color constancy. IEEE Trans. Image Process.,
16:2207–2214.
Wang, F., Wang, W., Wu, D., and Gao, G. (2022).
Color constancy via multi-scale region-weighed net-
work guided by semantics. Frontiers Neurorobotics,
16:841426.
Yang, K.-F., Gao, S.-B., and Li, Y.-J. (2015). Efficient illu-
minant estimation for color constancy using grey pix-
els. In Conf. Comput. Vision Pattern Recognit., pages
2254–2263, Boston, USA. IEEE/CVF.
Zeki, S. (1993). A Vision of the Brain. Blackwell Science,
ISBN: 0632030545.
Zhang, X.-S., Gao, S.-B., Li, R.-X., Du, X.-Y., Li, C.-Y.,
and Li, Y.-J. (2016). A retinal mechanism inspired
color constancy model. IEEE Trans. Image Process.,
25(3):1219–1232.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
36
