
Effects of Virtual-Teacher Appearance and Student Gender on Lesson
Effectiveness in Teaching About Social Issues
Tetsuya Matsui
1 a
and Seiji Yamada
2,3 b
1
Osaka Institute of Technology, Osaka City, Osaka, Japan
2
National Institute of Informatics, Chiyoda-ku, Tokyo, Japan
3
Graduate Institute for Advanced Studies, SOKENDAI, Chiyoda-ku, Tokyo, Japan
Keywords:
Human-Agent Interaction, Virtual Agent, Virtual Teacher, Educational Engineering, Pedagogical Agent,
Social Issue.
Abstract:
Virtual teachers (VTs) are an area of focus for the practical application of virtual agents. We focused on a VT
design method for teaching adults about social issues. On the basis of prior research, we hypothesized that a
robot-like VT would be perceived by students as more neutral. To verify this hypothesis, we conducted a two-
factor two-level experiment. One factor was the participants’ gender, and the other was the VTs’ appearance.
We used two types of VTs: human-like and robot-like. In the experiment, these VTs gave a lesson about a
quota system for females. The participants answered a questionnaire on how much they would favor introduc-
ing a quota system after watching a lesson movie presented by a VT. We conducted a two-way ANOVA for
the result of the questionnaire. As a result, female participants were more strongly affected by the robot-like
VT than the human-like VT. We suggest that this needs to be considered when designing VTs that teach about
social issues.
1 INTRODUCTION
In this paper, we examined virtual teachers who teach
about social issues. Virtual teachers (VTs) are virtual
agents that play the role of a teacher. Currently, there
is a worldwide shortage of teachers (Sutcher et al.,
2019). Therefore, the use of robot teachers or VTs
is being considered. Robot teachers are real robots
that are used for education in schools. Experiments
using robot teachers are being conducted with stu-
dents of all ages, from elementary school to univer-
sity (Brink and Wellman, 2020)(Newton and Newton,
2019)(Huang, 2021). In this study, we focused on
“adult education.” Education for adults is important
in promoting lifelong learning and raising awareness
of social issues (Bin Mubayrik, 2020)(Loeng, 2020).
It is important to educate adults as well as minors with
the correct knowledge, especially regarding social is-
sues.
We focused on “neutrality” among the charac-
teristics that robot teachers possess. Edwards et al.
showed that college students felt that robot teachers
a
https://orcid.org/0000-0001-9969-0854
b
https://orcid.org/0000-0002-5907-7382
were neutral in the class (Edwards et al., 2018). The
fact that a robot teacher is perceived as neutral by stu-
dents is a great advantage, especially for robot teach-
ers teaching social issues. Some social issues involve
stakes among multiple groups in society. For exam-
ple, consider the quota system. The quota system al-
locates seats in Congress and other offices on the basis
of gender, human race, and religion (Schwindt-Bayer,
2009). Several European countries have introduced a
quota system in parliament for females, but this is not
yet the case in Japan (Gaunder, 2015). Some males
believe it is not fair to adopt a quota system for fe-
males. When teaching about the quota system, it is
preferable for students to feel that the teacher is neu-
tral. We thought this was where we could use robot
teachers.
VTs are virtual anthropomorphic agents who play
the role of teachers. Many VTs that have been used
in studies have had human-like appearances (Scassel-
lati et al., 2018)(Matsui and Yamada, 2019). VTs
are also called pedagogical agents. In this paper, we
use the term “VTs” to emphasize the role played by
teachers. The appearance of VTs can be configured
in various ways. Prior research has shown that the
appearance of a virtual agent has a significant impact
198
Matsui, T. and Yamada, S.
Effects of Virtual-Teacher Appearance and Student Gender on Lesson Effectiveness in Teaching About Social Issues.
DOI: 10.5220/0012310900003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 198-204
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

on the user’s internal state. Virtual agents can indi-
cate their gender by their appearance. Several studies
have shown that users have different impressions of
virtual agents depending on the combination of the
virtual agent’s gender and the user’s gender (Payne
et al., 2013)(Guadagno et al., 2007)(Kim et al., 2007).
This indicates that the gender indicated by the virtual
agent’s appearance affects the user’s internal state. A
virtual agent’s appearance can also be human-like.
Banakou et al. showed that embodying a white per-
son in the virtual body (virtual agent avatar) of a black
person can reduce implicit racial prejudice against
blacks (Banakou et al., 2016). Virtual agent attire also
affects users (Fox and Bailenson, 2009). The results
of these previous studies show that the appearance of
a virtual agent has a significant impact on the user.
In this study, we focused on the appearance of VTs.
Matsui and Yamada showed that the combination of
the appearance of VTs and the subjects they teach
changed the effectiveness of the classes taught by the
VTs (Matsui and Yamada, 2019). Matsui showed that
VTs teaching about environmental issues were more
effective in the classroom if they looked more like an-
imals (Matsui, 2021).
In this study, we used two types of VTs: human-
like and robot-like. We expected the robot-like VT to
have the same effect as a real robot. The reason for
this effect is that “students feel that they are neutral”
(Edwards et al., 2018). Robot-like virtual agents are
often used instead of real robots (Bainbridge et al.,
2008)(Kiesler et al., 2008)(Li, 2015). Thus, we hy-
pothesized that a robot-like VT would feel more neu-
tral than a human VT. We envision robot-like VTs
teaching about social issues. Among social issues, we
focused on the quota system. Ultimately, we hypoth-
esized the following.
• H1: Robot-like VTs teaching about the quota sys-
tem are more effective in spreading the adoption
of the quota system than human-like VTs teaching
about the quota system because they feel more fair
to students.
We conducted an experiment to verify this hypoth-
esis. We focused not only on the appearance of the
VTs but also on the gender of the participants. The
reason for this is that there may be differences in atti-
tudes toward the quota system between males and fe-
males, especially the quota system for females. Thus,
we hypothesized the following.
• H2: Female participants are more strongly af-
fected by VTs teaching about the quota system
than male participants.
We conducted the experiment with two factors:
the participants’ gender and VTs’ appearance.
Figure 1: VTs used in experiment.
Table 1: Conditions in experiment.
Condition Participants’ gender VT’s appearance
Condition 1 female human-like
Condition 2 female robot-like
Condition 3 male human-like
Condition 4 male robot-like
2 EXPERIMENT
The experiment was conducted with two factors and
two levels. The factors were the participants’ gender
and the VTs’ appearance. The participants’ gender
had a female level and male level. The VTs’ appear-
ance had a human-like VT level and robot-like VT
level. In the human-like VT level, the VT had a fe-
male human-like appearance. This VT was our orig-
inal Live2D model. In the robot-like VT level, the
VT had a mechanical robot-like appearance. This VT
was a Live2D model that was released by VroidHub
1
.
We chose these VTs to verify our hypotheses formu-
lated in the introduction section. The human-like VT
was a female VT because many studies have used fe-
male virtual agents. Figure 1 shows the VTs used in
the experiment. Table 1 shows all conditions in the
experiment.
The lesson theme in this experiment was “quota
system.” The quota system is a political issue that di-
vides people according to their political beliefs. This
problem has a lot to do with neutrality. Thus, this is
an appropriate theme for this experiment, which seeks
to test the neutrality of robot-like VTs. In this exper-
iment, we will address a quota system for females.
Table 2 shows the utterance text spoken in the lesson.
Next, we will explain the experimental flow. The
experiment was conducted on the web. First, the par-
ticipants watched a movie in which the VT gave a
lesson. In the movie, the VT spoke the lesson text
(shown in Table 2). The movie was about 2 minutes
in length. Figure 2 shows a snapshot of the movie.
After watching the movie, the participants answered
1
https://hub.vroid.com/characters/
7291239036418050595/models/7006001194448814569
Effects of Virtual-Teacher Appearance and Student Gender on Lesson Effectiveness in Teaching About Social Issues
199

Table 2: Speech text in invasive acid rain problem level.
Hello.
Today, I would like to explain the history
and current status of the quota system, which allocates a certain number of people to Congress
and public institutions to ensure the rights of minorities in terms of race, gender, religion, etc.
A “quota system” is a system in which a certain number of seats in Congress,
for example, are always allocated to social minorities.
It is introduced to reflect the opinions of residents with diverse attributes for the sake of a healthy democracy
and to improve the status of those considered to be of low social standing.
The first country in history to introduce a quota system was Norway.
The Norwegian Gender Equality Act of 1978 stipulates that
“when a public committee is established consisting of four or more members,
the members must be selected so that no more than 40 percent of the members are of any one gender.”
This was a revolutionary law at the time,
and it spread first to Scandinavian countries such as Denmark and Sweden and then to the rest of the world.
This is due, in particular, to the increased global awareness of the need to improve the status of females,
especially after World War II and the adoption of the Declaration
on the Elimination of Discrimination against Women by the United Nations.
A measure of the success of this effort is that
the percentage of females in the National Assembly is over 30.
Nordic countries such as Sweden, Denmark, and Norway as well as the Netherlands and Germany
exceed this standard.
In Japan, the percentage of female Diet members is about 10 percent in the House of Representatives
and 20 percent in the House of Councillors, but Japan has not yet adopted a quota system.
However, efforts to increase the percentage of females
in the Diet, as well as in corporate executive positions and university faculties, have been promoted by
successive cabinets.
In April 2023, Prime Minister Kishida announced his intention
to increase the percentage of female executives at TSE prime companies to 30 percent by 2030.
On the other hand, some have expressed the opinion that the quota system discriminates against males
and that “true rights cannot be obtained while being legally singled out for special treatment.”
Another difficult issue being debated is whether this system should be expanded
in the future to include racial and religious minorities other than women.
Figure 2: Snapshot of movie used in experiment.
questionnaires. The questionnaires were constructed
with three questions as follows.
• Q1: Do you favor the introduction of a quota sys-
tem for female legislators?
• Q2: Would you support the introduction of a
quota system for females on the boards of large
corporations and in university faculties?
• Q3: Do you favor the introduction of a quota sys-
tem for religious and racial minorities?
These were questions to examine the effectiveness
of the lesson. The participants answered these three
questions on a 7-point Likert scale (0: not at all, 7:
very much). We analyzed the results of the questions
with a two-way analysis of variance.
All participants were recruited via Yahoo! Crowd-
sourcing
2
and received 50 yen (about 46 cents) as a re-
ward. The reliability of experiments on the web was
2
https://crowdsourcing.yahoo.co.jp/
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
200
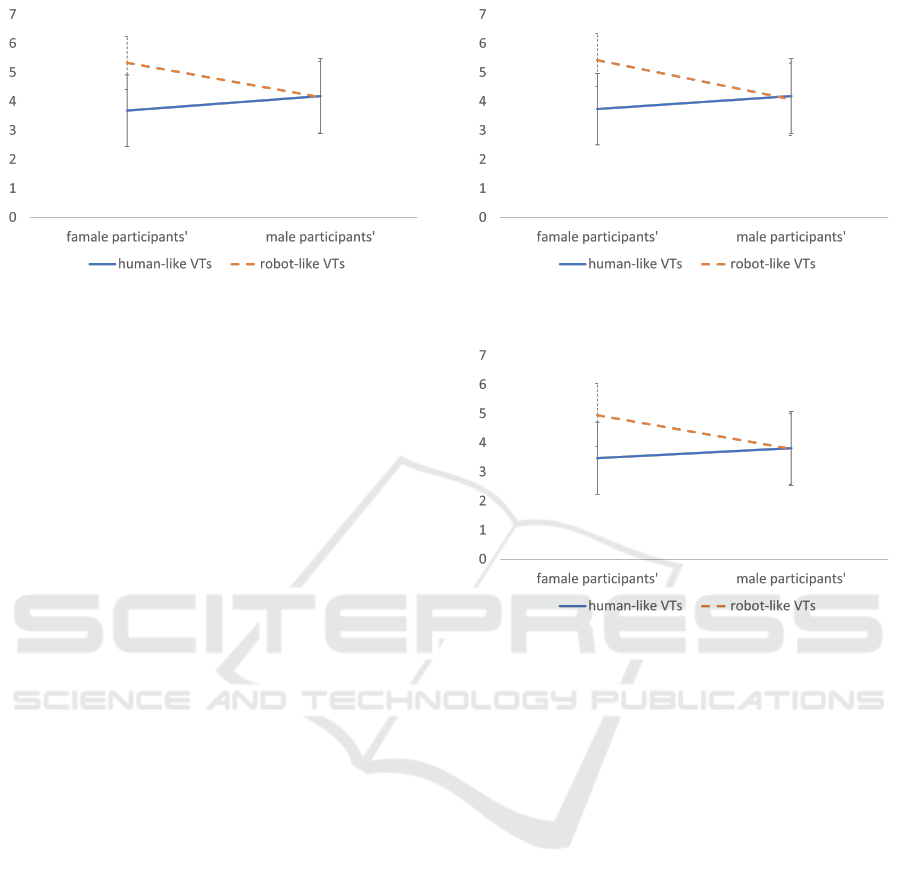
Figure 3: Averages for Q1 in each condition. Error bars
mean SDs.
shown by Crump et al. (Crump et al., 2013). This
experiment was conducted with the approval of the
Ethics Committee at the Osaka Institute of Technol-
ogy.
In condition 1 (female participants, human-like
VT), there were 19 participants, ranging in age from
25 to 50 years for an average of 37.7 (SD = 7.4). In
condition 2 (male participants, human-like VT), there
were 54 participants, ranging in age from 19 to 50
years for an average of 42.5 (SD = 6.4). In condition
3 (female participants, robot-like VT), there were 20
participants, ranging in age from 20 to 78 years for an
average of 48.7 (SD = 14.6). In condition 4 (male par-
ticipants, robot-like VT), there were 81 participants,
ranging in age from 28 to 66 years for an average of
46.7 (SD = 9.4).
3 RESULTS
Table 3 shows the averages and SDs for each question.
We conducted a two-way ANOVA for each ques-
tion.
The top of Table 4 shows the results of the two-
way ANOVA for Q1. There was a statistically signif-
icant interaction between the participants’ gender ×
the VTs’ appearance (p < 0.01). The bottom shows
the results of a simple interaction test for the inter-
actions between the participants’ gender × the VTs’
appearance. There was a significant difference for the
simple main effect for the VTs’ appearance when the
participants’ gender was the female level (p < 0.01).
Also, there was a significant difference for the simple
main effect for the participants’ gender when the VTs’
appearance was the robot-like VT level (p < 0.01).
Figure 3 shows the interaction of Q1.
The top of Table 5 shows the results of the two-
way ANOVA for Q2. There was a statistically signif-
icant interaction between the participants’ gender ×
Figure 4: Averages for Q2 in each condition. Error bars
mean SDs.
Figure 5: Averages for Q3 in each condition. Error bars
mean SDs.
the VTs’ appearance (p < 0.01). The bottom shows
the results of a simple interaction test for the inter-
actions between the participants’ gender × the VTs’
appearance. There was a significant difference for the
simple main effect for the VTs’ appearance when the
participants’ gender was the female level (p < 0.01).
Also, there was a significant difference for the simple
main effect for the participants’ gender when the VTs’
appearance was the robot-like VT level (p < 0.01).
Figure 4 shows the interaction of Q2.
The top of Table 6 shows the results of the two-
way ANOVA for Q3. There was a statistically signif-
icant interaction between the participants’ gender ×
the VTs’ appearance (p < 0.01). The bottom shows
the results of a simple interaction test for the inter-
actions between the participants’ gender × the VTs’
appearance. There was a significant difference for the
simple main effect for the VTs’ appearance when the
participants’ gender was the female level (p < 0.01).
Also, there was a significant difference for the simple
main effect for the participants’ gender when the VTs’
appearance was the robot-like VT level (p < 0.01).
Figure 5 shows the interaction of Q3.
Effects of Virtual-Teacher Appearance and Student Gender on Lesson Effectiveness in Teaching About Social Issues
201
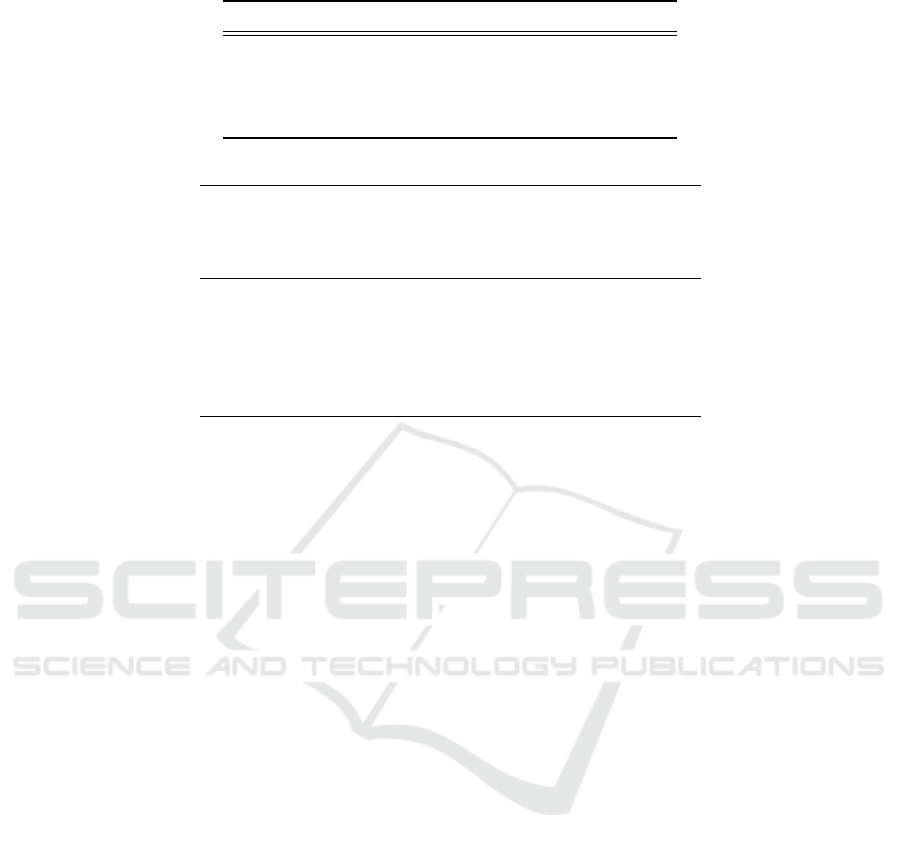
Table 3: Averages and SDs of scores for each question.
Condition Q1 Q2 Q3
Condition 1 3.68 (1.52) 3.74 (1.52) 3.47 (1.53)
Condition 2 4.19 (1.68) 4.19 (1.67) 3.81 (1.61)
Condition 3 5.33 (0.84) 5.43 (0.85) 4.95 (1.17)
Condition 4 4.15 (1.53) 4.07 (1.55) 3.79 (1.50)
Table 4: Result of ANOVA for scores of Q1. There was significant main effect of interaction.
source F p
participants’ gender 1.43 0.23
VTs’ appearance 8.02 0.00 ∗∗
interaction 9.66 0.00 ∗∗
sub-effect test (simple main effect)
effect F p
participants’ gender (human-like VT) 1.74 0.19
participants’ gender (robot-like VT) 9.72 0.00 ∗∗
VTs’ appearance (female participants) 11.43 0.00 ∗∗
VTs’ appearance (male participants) 0.08 0.77
4 DISCUSSION
4.1 Hypothesis Survey
Table 4 and Figure 3 indicate that female partici-
pants were more strongly affected by the VT when
the VT had a robot-like appearance than when it had
a human-like appearance. For male participants, there
was no significant difference between the human-like
VT level and robot-like VT level. To interpret this re-
sult, we must consider the appearance of the VTs. In
the human-like VT level, the VT had a female human-
like appearance. This appearance seemed to make the
participants feel that the VT thinks from a human fe-
male’s perspective. Thus, participants may have felt
the VT had biased opinions when it talked about the
quota system for females. They may have thought
“the VT is acting in her own best interest.” This may
have led to the diminishing influence of the VT. How-
ever, this effect was not observed in the male partic-
ipants. This result suggests that the participants felt
a bias when the VT’s gender was the same as them-
selves. Table 4 and Figure 3 show that the robot-like
VT felt fairer than the human-like VT. This result is
consistent with prior research (Edwards et al., 2018).
Table 5 and Figure 4 also indicate that female par-
ticipants were more strongly affected by the VT when
the VT had a robot-like appearance than when it had
a human-like appearance. This result was the same as
Q1. The result of Q2 shows that the participants had
a tendency to agree with introducing a quota system
to areas other than legislators.
Table 6 and Figure 5 also indicate that female par-
ticipants were more strongly affected by the VT when
the VT had a robot-like appearance than when it had
a human-like appearance. This result was the same as
Q1. This is a remarkable result. Q3 was not directly
related to “female.” Thus, the bias derived from the
VTs’ appearance may not have affected this question.
We have to wonder why there was a significant differ-
ence for this question. One possible explanation is the
effect of the previous question. Participants who an-
swered Q1 and Q2 with higher scores may have also
given higher scores to Q3. In any case, the results sug-
gest that the robot-like VT was effective in persuading
the participants to adopt a quota system for minorities
other than females.
4.2 Design Policy from Experimental
Results
These results support our hypothesis. The results of
the three questions show that the robot-like VT was
effective in persuading the female participants to ac-
cept the quota system. This suggested that the fe-
male participants may have felt that the robot-like
VT was neutral. The female participants seemed to
think that the robot-like VT spoke without regard to
its own interests. Otherwise, the female human-like
VT seemed to be perceived as speaking for her own
benefit. This may have led to differences in the results
between conditions. However, this difference was not
observed for the male participants, who seemed to
think that the human-like VT was as fair as the robot-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
202
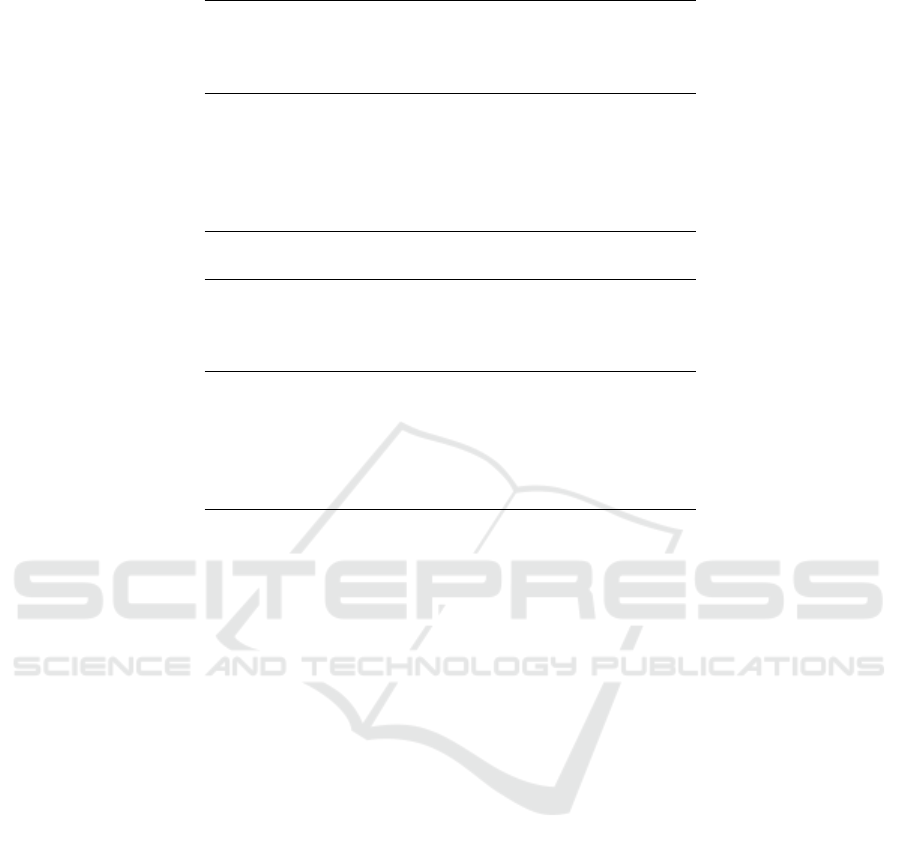
Table 5: Result of ANOVA for scores of Q2. There was significant main effect of interaction.
source F p
participants’ gender 2.02 0.16
VTs’ appearance 6.79 0.01 ∗
interaction 8.66 0.00 ∗∗
sub-effect test (simple main effect)
effect F p
participants’ gender (human-like VT) 1.10 0.30
participants’ gender (robot-like VT) 9.99 0.00 ∗∗
VTs’ appearance (female participants) 9.97 0.00 ∗∗
VTs’ appearance (male participants) 0.12 0.73
Table 6: Result of ANOVA for scores of Q3. There was significant main effect of interaction.
source F p
participants’ gender 2.23 0.14
VTs’ appearance 6.95 0.00 ∗∗
interaction 7.36 0.00 ∗∗
sub-effect test (simple main effect)
effect F p
participants’ gender (human-like VT) 0.69 0.41
participants’ gender (robot-like VT) 9.69 0.00 ∗∗
VTs’ appearance (female participants) 9.38 0.00 ∗∗
VTs’ appearance (male participants) 0.00 0.94
like VT.
4.3 Limitation
The greatest weakness of this study is that it did
not examine male human-like VTs. Male human-
like VTs may affect only male participants. Alter-
natively, male human-like VTs may be perceived just
like robot-like VTs because males do not benefit di-
rectly from the quota system. This is our future work.
5 CONCLUSION
In this paper, we discussed the design of VTs for
teaching adults about social issues. On the basis of
prior research, we hypothesized that robot-like VTs
would be perceived by students as more neutral. To
verify this hypothesis, we conducted a two-factor
two-level experiment. One factor was the partici-
pants’ gender, and the other was the VTs’ appear-
ance. We used two types of VTs: human-like and
robot-like. In the experiment, these VTs gave a les-
son about the quota system for females. The partici-
pants answered a questionnaire about how much they
favored introducing a quota system after watching the
lesson movie. We conducted a two-way ANOVA for
the result of the questionnaire. As a result, female
participants were more strongly affected by the VT
when the VT had a robot-like appearance than when
it had a human-like appearance. This result seemed
to occur from a bias brought about by the VT’s ap-
pearance. The female participants probably felt that
the female human-like VT spoke in its own best inter-
est and the robot-like VT spoke neutrally. This result
shows that VTs’ appearance has a huge impact on stu-
dents when they teach about social issues. We suggest
that this needs to be considered when designing VTs
that teach about social issues.
REFERENCES
Bainbridge, W. A., Hart, J., Kim, E. S., and Scas-
sellati, B. (2008). The effect of presence on
human-robot interaction. In RO-MAN 2008-The
17th IEEE International Symposium on Robot
and Human Interactive Communication, pages
701–706.
Banakou, D., Hanumanthu, P. D., and Slater, M.
(2016). Virtual embodiment of white people in a
black virtual body leads to a sustained reduction
in their implicit racial bias. Frontiers in human
neuroscience, page 601.
Bin Mubayrik, H. F. (2020). New trends in formative-
summative evaluations for adult education. Sage
Open, 10(3):2158244020941006.
Brink, K. A. and Wellman, H. M. (2020). Robot
Effects of Virtual-Teacher Appearance and Student Gender on Lesson Effectiveness in Teaching About Social Issues
203

teachers for children? young children trust
robots depending on their perceived accu-
racy and agency. Developmental Psychology,
56(7):1268.
Crump, M. J., McDonnell, J. V., and Gureckis, T. M.
(2013). Evaluating amazon’s mechanical turk as
a tool for experimental behavioral research. PloS
one, 8(3):e57410.
Edwards, B. I., Muniru, I. O., Khougali, N., Cheok,
A. D., and Prada, R. (2018). A physically em-
bodied robot teacher (pert) as a facilitator for
peer learning. In 2018 IEEE frontiers in edu-
cation conference (FIE), pages 1–9.
Fox, J. and Bailenson, J. N. (2009). Virtual virgins
and vamps: The effects of exposure to female
characters’ sexualized appearance and gaze in
an immersive virtual environment. Sex roles,
61:147–157.
Gaunder, A. (2015). Quota nonadoption in japan: the
role of the women’s movement and the opposi-
tion. Politics & Gender, 11(1):176–186.
Guadagno, R. E., Blascovich, J., Bailenson, J. N., and
McCall, C. (2007). Virtual humans and persua-
sion: The effects of agency and behavioral real-
ism. Media Psychology, 10(1):1–22.
Huang, S. (2021). Design and development of edu-
cational robot teaching resources using artificial
intelligence technology. International Journal of
Emerging Technologies in Learning, 15(5).
Kiesler, S., Powers, A., Fussell, S. R., and Torrey,
C. (2008). Anthropomorphic interactions with
a robot and robot–like agent. Social cognition,
26(2):169–181.
Kim, Y., Baylor, A. L., and Shen, E. (2007). Pedagog-
ical agents as learning companions: the impact
of agent emotion and gender. Journal of Com-
puter Assisted Learning, 23(3):220–234.
Li, J. (2015). The benefit of being physically
present: A survey of experimental works com-
paring copresent robots, telepresent robots and
virtual agents. International Journal of Human-
Computer Studies, 77:23–37.
Loeng, S. (2020). Self-directed learning: A core con-
cept in adult education. Education Research In-
ternational, 2020:1–12.
Matsui, T. (2021). Power of gijinka: Designing vir-
tual teachers for ecosystem conservation educa-
tion. In Proceedings of the 9th International
Conference on Human-Agent Interaction, pages
328–331.
Matsui, T. and Yamada, S. (2019). The design method
of the virtual teacher. In Proceedings of the 7th
International Conference on Human-Agent In-
teraction, pages 97–101.
Newton, D. P. and Newton, L. D. (2019). Humanoid
robots as teachers and a proposed code of prac-
tice. In Frontiers in education, volume 4, page
125.
Payne, J., Szymkowiak, A., Robertson, P., and John-
son, G. (2013). Gendering the machine: Pre-
ferred virtual assistant gender and realism in
self-service. In Intelligent Virtual Agents: 13th
International Conference, IVA 2013, Edinburgh,
UK, August 29-31, 2013. Proceedings 13, pages
106–115.
Scassellati, B., Brawer, J., Tsui, K., Nasihati Gi-
lani, S., Malzkuhn, M., Manini, B., Stone, A.,
Kartheiser, G., Merla, A., Shapiro, A., et al.
(2018). Teaching language to deaf infants with
a robot and a virtual human. In Proceedings of
the 2018 CHI Conference on human Factors in
computing systems, pages 1–13.
Schwindt-Bayer, L. A. (2009). Making quotas work:
The effect of gender quota laws on the election of
women. Legislative studies quarterly, 34(1):5–
28.
Sutcher, L., Darling-Hammond, L., and Carver-
Thomas, D. (2019). Understanding teacher
shortages: An analysis of teacher supply and de-
mand in the united states. Education policy anal-
ysis archives, 27(35).
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
204
