
Toward a Global Constraint for Minimizing the Flowtime
Camille Bonnin
1
, Arnaud Malapert
2 a
, Margaux Nattaf
1
and Marie-Laure Espinouse
1 b
1
Univ. Grenoble Alpes, CNRS, Grenoble INP, G-SCOP, 38000 Grenoble, France
2
Universit
´
e C
ˆ
ote d’Azur, CNRS, I3S, France
Keywords:
Constraint Programming, Global Constraint, Operation Research, Scheduling, Flowtime.
Abstract:
This work is a study toward a global constraint minimizing the flowtime of a single machine scheduling prob-
lem. Classical methods for filtering algorithms use a lower bound coming from the solution of a relaxation.
Notably, there are several polynomial relaxations to minimize the flowtime on a single machine. A general
scheme for the global constraint is proposed that allows the use of a subset of polynomial relaxations that lays
the ground for more complex filtering algorithms. The filtering algorithm has a complexity of O(n · M · R),
where n is the number of tasks, M is an upper bound on the time windows of these tasks, and R is the com-
plexity of the algorithm used for solving the relaxation. The constraint has been tested on both single machine
and flowshop problems. Experimental results show that the performance improvement depends on the type of
problem. The number of branches reduction is promising for designing new filtering rules.
1 INTRODUCTION
In today’s society, scheduling problems are encoun-
tered everywhere with broad constraints and goals va-
riety. The most famous and most studied objective
function is the minimization of the makespan (i.e. the
end time of the schedule) (Brucker, 2004; Strusevich,
2022; Stewart et al., 2023). However, other objec-
tives are also often used in real life. Such is the case
of the minimization of the flowtime (i.e. the average
completion time of the tasks) which can be used to
model works in progress. This objective has many
applications that goes from the industrial field, such
as foundry (Bewoor et al., 2018) to the healthcare ser-
vice sector (Cho et al., 2023), going through multi-
processor scheduling (Awerbuch et al., 2002). There
are many methods to solve those problems: heuristics,
linear programming, and constraint programming are
among them. Each of them has pros and cons. Some
solve the problem exactly, while others give an ap-
proximation. Some methods outperform others, de-
pending on the problem, and on the instance.
Constraint programming (CP) is a well-
established method for solving scheduling problems.
In fact, today, some of the largest companies (Google,
IBM, Oracle) implement their own solver. However,
today, CP is more focused on satisfaction problems
a
https://orcid.org/0000-0003-0099-479X
b
https://orcid.org/0000-0003-0120-661X
than optimization ones. Indeed, the classical ap-
proach for optimization is to solve a sequence of
satisfaction problems where additional constraints
bound the domain of the objective variable. So, the
flowtime minimization can be done without other
additional mechanisms by independently propagating
the resource constraints and the sum objective
constraint (Baptiste et al., 2001a). Nevertheless,
there are more and more studies on the integration
of optimization in scheduling constraint problems.
However, most of those works are focused on
makespan minimization. As far as we know, this is
not yet the case for other objectives, such as sum
objectives, for which techniques propagating simul-
taneously the resource and optimization constraints
do not exist much. Still, there are some works about
the integration of such objectives in CP (Baptiste
et al., 2006). In particular, (Kov
´
acs and Beck, 2011)
presented a global constraint for minimizing the
weighted flowtime for a single machine problem.
This work aims to contribute to creating a frame-
work dedicated to the integration of sum objectives
in scheduling constraint problems. This is strongly
related to the completion constraint (Kov
´
acs and
Beck, 2011) for the weighted flowtime. Here, we
define a new global constraint, the flowtime con-
straint, that is more specialized, as it assumes that
all tasks have the same weight, but has more can-
didate relaxations for designing efficient filtering al-
70
Bonnin, C., Malapert, A., Nattaf, M. and Espinouse, M.
Toward a Global Constraint for Minimizing the Flowtime.
DOI: 10.5220/0012310200003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th Inter national Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 70-81
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

gorithms. Thanks to the declarative aspect of CP, a
global constraint can be used to model different prob-
lems without having to modify the algorithms behind
it. The relaxations of the flowtime and completion
constraints are identified and classified according to
their complexity. Then, a general but simple schema
for filtering is designed that allows to use and com-
pare multiple relaxations. The interest of such global
constraint is validated experimentally, and the re-
laxations are compared within the constraint which
opens prospects for improving and refining filtering
rules and algorithms to minimize the flowtime.
The outline of the paper is the following. First,
Section 2 introduces some notations and defines the
global flowtime constraint. Secondly, Section 3
gives a short overview of the literature on global
scheduling constraints as well as the classification of
the relaxations for the flowtime and completion
constraints. Then, Section 4 presents the global
schema of the flowtime constraint including its fil-
tering rules and algorithms. Finally, Section 5 gives
some experimental results on a single machine prob-
lem and on the permutation flowshop problem.
2 NOTATIONS, DEFINITIONS
In order to give the state-of-the art and describe our
constraint, some notations and definitions must be
provided. This section introduces some classical no-
tations and definitions in scheduling, and formally de-
fines the flowtime constraint proposed in this paper.
Although the proposed constraint has a general
schema that allows changing the relaxation internally
used to compute the lower bound on the flowtime,
the scheduling problem on which this constraint is
based is always the same. This problem is written
1|r
j
;d
j
|
∑
C
j
in the Graham notation (Graham et al.,
1979). The machine field 1 indicates that tasks are
scheduled on a single unary capacity resource. The
constraint field r
j
;d
j
indicates that a schedule of the
tasks must satisfy their release dates r
j
, and deadlines
d
j
. The objective field
∑
C
j
states that the optimiza-
tion criterion is the total completion time (i.e. the sum
of the completion times C
j
) minimization. This ob-
jective is also often called the flowtime through mis-
use of language in scheduling theory (Pinedo, 2012)
where the flowtime is defined formally as
∑
F
j
with
F
j
= C
j
− r
j
. Since they both are equivalent to within
a constant, let us call the total completion time flow-
time in the following and let F =
∑
C
j
denote the vari-
able representing the flowtime throughout this paper.
In the following, let us assume that there are n
tasks in the scheduling problem, written T
1
, . . . , T
n
or simply 1,...,n when there is no ambiguity. In ad-
dition to a release date, r
j
, and a deadline, d
j
, each
task j has a fixed duration, p
j
. Let us assume that
all data are positive integers and that the durations are
non-zeros. When scheduled, the time at which task
j begins its execution is called the starting time of j
and written S
j
. C
j
= S
j
+ p
j
represents the time at
which task j finishes its execution and is called the
completion time of j.
flowtime (([S
1
, . . . , S
n
], [p
1
, . . . , p
n
]), F)
def
⇐⇒ ((∀
1≤i< j≤n
,(S
i
+ p
i
≤ S
j
∨ S
j
+ p
j
≤ S
i
)) ∧
∑
i
(S
i
+ p
i
) = F)
Here, the durations are assumed constant, but they
could be adapted easily for variable durations by tak-
ing their lower bounds. The proposed filtering rules
update the lower bound of F and the lower and upper
bounds of the S
j
variables. As it is assumed that the
solver enforces C
j
= S
j
+ p
j
, it also implicitly updates
the C
j
variables. Given a variable X, let X denote its
lower bound, and X its upper bound.
3 RELATED WORK
This section gives the state-of-the-art related to
the flowtime constraint. First, Section 3.1 de-
scribes the most famous global constraints in schedul-
ing. Then, Section 3.2 lists the relaxations of
1|r
j
;d
j
; prec|
∑
C
j
, the scheduling problem used for
defining the flowtime constraint with the additions
of precedence constraints (prec). The reasons for this
addition is explained in Section 3.2. Finally, Sec-
tion 3.3 briefly describes the algorithms for solving
the identified polynomial relaxations.
3.1 Scheduling and Global Constraints
The idea of using global constraints to improve the
performances of constraint programming in solving
scheduling problems is not recent and has shown
significant results. Indeed, the disjunctive con-
straint (Carlier, 1982; Carlier and Pinson, 1990; Bap-
tiste et al., 2001b; Vil
´
ım, 2004; Fahimi and Quim-
per, 2014) and the cumulative constraint (Aggoun and
Beldiceanu, 1993; Letort et al., 2012; Gay et al.,
2015) are well known and efficient constraints for
modeling scheduling problems.
The disjunctive constraint is one of the first global
constraints created for scheduling problems, and its
filtering algorithm has many versions (Baptiste et al.,
2001b). Some of those algorithms are based on the
edge-finding rule, a filtering technique that takes a set
of tasks T and tests for each task of T if it must, can,
Toward a Global Constraint for Minimizing the Flowtime
71

or cannot be executed first (or last) in T . For example,
(Carlier and Pinson, 1990) used edge-finding for the
disjunctive constraint, and (Vil
´
ım, 2004) improved it
by using a specific structure called θ-λ tree.
The disjunctive constraint is based on a single
machine problem that can be used as a block to
model more complex scheduling problems. The
completion constraint proposed in (Kov
´
acs and
Beck, 2011) for minimizing the weighted flowtime
uses the same approach. It is based on the single
machine problem, tests the tasks one by one, and
makes deductions according to the results of those
tests. These tests allow filtering combinations of val-
ues that cannot lead to a better-cost solution than the
one found so far, making the filtering algorithm of
completion part of the cost-based domain filtering
approach defined in (Focacci et al., 1999). In order to
do so, those tests use a classical technique that con-
sists of computing a lower bound on the objective by
solving a relaxation of their problem (i.e., a version
of the problem with weakened constraints). By doing
so, the efficiency of the filtering rule and algorithm is
linked directly to the quality and the time needed to
solve the relaxation even when incrementality is in-
volved. This means that the choice of relaxation is
very important in this approach.
3.2 Flowtime Relaxations
To design the filtering algorithm of the flowtime
constraint, it is necessary to identify and classifies
the relaxations of the single machine problem that
minimizes the flowtime with respect to the release
dates, the deadlines, and the precedence constraints,
1|r
j
;d
j
; prec|
∑
C
j
. The addition of the precedence
constraints is crucial here in order to have a more
complete view of what is possible or not in polyno-
mial time. Another important reason for this addi-
tion is that some precedences can be deduced from
the time windows of the tasks, and so relaxations
with precedences can still be used as relaxations of
1|r
j
;d
j
|
∑
C
j
. However, note that here and in the fol-
lowing, when the constraint prec is used, it means
precedences inherent to the problem and not induced
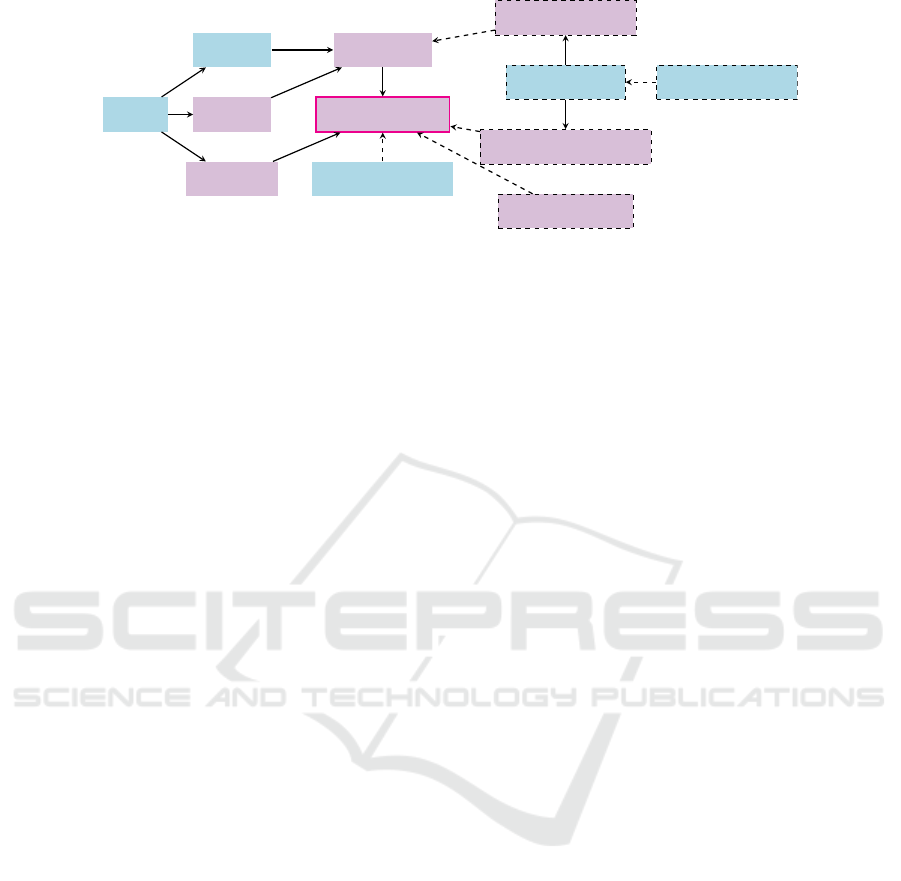
by the data. Figure 1 is a diagram that gives the re-
lations between these relaxations and classify them
according to their complexity. N P -hard problems
are in purple, and polynomial problems are in blue.
Problems surrounded by a dashed box allow preemp-
tion, which means that the execution of a task can be
stopped for executing another one and then resumed
later. A 99K B means that A is a relaxation of B and
A → B that A is both a relaxation and a reduction of
B. Both relations are transitive and therefore, all listed
problems are relaxations of 1|r
j
;d
j
; prec|
∑
C
j
.
The general problem considered in this sec-
tion, 1|r
j
;d
j
; prec|
∑
C
j
is N P -hard because it has
three N P -hard relaxations that are also reductions:
1|r
j
|
∑
C
j
, the problem with release dates (Lenstra
et al., 1977); 1|r
j
;d
j
|
∑
C
j
, the problem with re-
lease dates and deadlines whose complexity is the re-
sult of being a reduction of the previous one which
is the general problem of the flowtime constraint;
and 1|prec|
∑
C
j
, the problem with precedence con-
straints (Lenstra and Rinnooy Kan, 1978).
It also has three other N P -hard relaxations
that are not reductions because of the preemp-
tion: 1|r
j
;d
j
; pmtn|
∑
C
j
, the preemptive problem
with release dates and deadlines (Du and Leung,
1993); 1|chains;r
j
; pmtn|
∑
C
j
, the preemptive prob-
lem with release dates and precedence constraints
in the form of chains graph (Lenstra, 2023); and
1|prec; pmtn|
∑
C
j
, the preemptive problem with
precedence constraints which has the same complex-
ity as 1|prec|
∑
C
j
as proven in (Brucker, 2004) be-
cause there are no release dates.
In order to have a filtering algorithm with a poly-
nomial complexity, those problems will not be used
in the flowtime constraint. However, they can give
some indications of what is impossible to do in poly-
nomial time. For example, 1|chains; r
j
; pmtn|
∑
C
j
in-
dicates that it is impossible to minimize the flowtime
in polynomial time if there are both release dates and
precedence constraints even if preemption is allowed.
Indeed, chain graphs are the root of all precedence
graphs, so what is impossible with them is impossi-
ble with all other forms of precedence graphs. The
complexity of 1|prec; pmtn|
∑
C
j
shows that it is im-
possible to minimize the flowtime in polynomial time
if there are precedence constraints, even if preemption
is allowed. This justifies the choice made not to con-
sider precedence constraints for the general problem
of the flowtime constraint. Finally, in order to have
a polynomial relaxation of 1|r
j
;d
j
; prec|
∑
C
j
, at least
two of those three constraints must be dropped.
1|r
j
;d
j
; prec|
∑
C
j
has five polynomial relax-
ations: 1||
∑
C
j
, the problem without any particular
constraint except the fact that tasks cannot be pre-
empted (Brucker, 2004); 1|d
j
|
∑
C
j
, the problem with
deadlines, (Chen et al., 1998); 1|sp-graph|
∑
w
j
C
j
,
the one where precedence constraints form a series-
parallel graph and with the objective of min-
imizing the weighted flowtime (Lawler, 1978);
1|r
j
; pmtn|
∑
C
j
, the preemptive problem with release
dates (Brucker, 2004); 1|r
j
; pmtn|
∑
w
j
M
j
, the pre-
emptive problem with release dates and whose objec-
tive is to minimize the weighted mean busy time (i.e.
the weighted sum of the average execution times of
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
72
1|r
j
; d
j
; prec|
P
C
j
1|r
j
|
P
C
j
1|prec|
P
C
j
1||
P
C
j
1|r
j
; d
j
|
P
C
j
1|r
j
; d
j
; pmtn|
P
C
j
1|r
j
; pmtn|
P
C
j
1|chains; r
j
; pmtn|
P
C
j
1|prec; pmtn|
P
C
j
1|sp-graph|
P
w
j
C
j
1|d
j
|
P
C
j
1|r
j
; pmtn|
P
w
j
M
j
Figure 1: Reductions and relaxations of 1|r
j
;d
j
; prec|
∑
C
j
.
the tasks) (Kov
´
acs and Beck, 2011).
In fact, 1|r
j
; pmtn|
∑
w
j
M
j
is not exactly a relax-
ation of 1|r
j
;d
j
; prec|
∑
C
j
as the objective is not the
same, but as explained in (Kov
´
acs and Beck, 2011),
a lower bond of
∑
w
j
C
j
is given by
∑
w
j
M
j
, where
M
j
= (
∑
t
i, j
)/p
j
, with t
i, j
= i if j is executed at time i
and 0 otherwise. Note also that 1|r
j
; pmtn|
∑
w
j
C
j
is
N P -hard (Labetoulle et al., 1984). For simplification
purposes, 1|r
j
; pmtn|
∑
w
j
M
j
will still be referred to
as a relaxation of 1|r
j
;d
j
; prec|
∑
C
j
in this article.
1||
∑
C
j
can be solved in polynomial time by the
algorithm described in (Brucker, 2004). However,
as its value is constant no matter the domains of the
S
j
variables, it is not interesting to compute a lower
bound. Still, it is difficult to anticipate which of the
four other polynomial relaxations will give the best
results for filtering the flowtime constraint. So, in or-
der to compare those relaxations, the flowtime con-
straint uses a global scheme allowing changing the re-
laxation. Let us now present the algorithms solving
the polynomial relaxations for a better understanding.
3.3 Solving the Polynomial Relaxations
Out of the five polynomial relaxations of 1|r
j
;d
j
|
∑
C
j
found in the previous subsection, four can be solved
by a (priority) list algorithm. A list algorithm sched-
ules the tasks in a given order, as soon as possible, and
without preemption. For example, Smith’s algorithm
(or SPT algorithm) for 1||
∑
C
j
orders the tasks by the
shortest processing time and then schedules them as
soon as possible, a new task begins when the previous
one ends (Brucker, 2004). The complexity of a list
algorithm is O(n · log(n)). A priority list algorithm
schedules at each time point the task with the highest
priority. In most cases, the complexity of a priority
list algorithm is also O(n · log(n)).
The preemptive problem with release dates
1|r
j
; pmtn|
∑
C
j
is solved by a priority list algo-
rithm (Brucker, 2004) that uses modified Smith’s rule.
This rule consists of scheduling the available unfin-
ished task with the smallest remaining processing
time at each release date or completion date. There-
fore, a task can only be preempted at the release date
of another task. The only possible idle times are
when no unfinished task is available because of the
release dates. The preemptive problem with release
dates of minimizing the weighted mean busy time
1|r
j
; pmtn|
∑
w
j
M
j
is also solved by a priority list al-
gorithm (Kov
´
acs and Beck, 2011). This is similar to
1|r
j
; pmtn|
∑
C
j
, except that the priority is given to the
available unfinished task with the largest ratio w
j
/p
j
.
The mandatory part is an important notion for
time-tabling methods for the disjunctive (Fahimi
and Quimper, 2014) and cumulative (Aggoun and
Beldiceanu, 1993) constraints. The mandatory part
of a task (Lahrichi, 1982) is a time interval in which
the task is scheduled in any feasible solution. If
the mandatory part is not empty, it is computed by
[d
j
− p
j
; p
j
+ r
j
]. Enforcing the mandatory parts
in 1|r
j
; pmtn|
∑
C
j
does not change the complex-
ity of the solving algorithm (Bonnin et al., 2022).
Indeed, the algorithm fixes the mandatory part of
the tasks and schedules the remaining parts around
them. The reasoning is similar for 1|r
j
; pmtn|
∑
w
j
M
j
.
This new constraint on the tasks will be noted
mand so that the problems with mandatory parts,
1|r
j
; pmtn; mand|
∑
C
j
and 1|r
j
; pmtn; mand|
∑
w
j
M
j
,
are also polynomial relaxations. The problems with-
out mandatory parts are relaxations of the ones with
mandatory parts.
The problem with deadlines 1|d
j
|
∑
C
j
is solved
by a priority list algorithm (Chen et al., 1998). This is
a backward scheduling algorithm in which the tasks
are scheduled from the last to the first in the schedule.
The priority is given to the available unfinished task
(whose deadline is bigger or equal to the current time)
with the largest processing time. The schedule ends
at time
∑
p
j
which is then the first time point. Let us
remark that the schedule has no idle time.
The last identified polynomial problem where the
precedence constraints form a series-parallel graph
1|sp-graph|
∑
w
j
C
j
is not solved by a priority list
algorithm. It is based on the traversal of the tree
Toward a Global Constraint for Minimizing the Flowtime
73

decomposition of the series-parallel graph that in-
volves more complex operations for labeling the
nodes (Lawler, 1978). However, this algorithm still
has a complexity of O(n · log(n)).
To conclude, the state-of-the-art shows that global
constraints improve the performance in constraint-
based scheduling and that some efficient ones are
based on single machine problems which are used as
building blocks for modeling complex problems. The
polynomial relaxations of global constraints play a
role in designing filtering rules and algorithms. Such
relaxations have been identified and described for
1|r
j
;d
j
|
∑
C
j
which defines the flowtime constraint.
It is now possible to explain the filtering rules and al-
gorithm of the flowtime constraint.
4 THE FLOWTIME CONSTRAINT
This section describes the filtering algorithm of the
flowtime constraint. Section 4.1 gives the global
schema of the filtering algorithm which is composed
of two rules described in Sections 4.2 and 4.3.
For now, the flowtime constraint does not use the
series-parallel graph relaxation, 1|sp-graph|
∑
w
j
C
j
.
Indeed, it is more complex as to our knowledge there
does not exist any non-trivial algorithm that trans-
forms efficiently an instance of 1|r
j
;d
j
|
∑
C
j
into an
instance of 1|sp-graph|
∑
w
j
C
j
.
4.1 Global Schema
Section 3 showed that the choice of the relaxation is
important to develop a global constraint for schedul-
ing problems using lower bounds. It is then interest-
ing to compare the performances of multiple relax-
ations of the 1|r
j
;d
j
|
∑
C
j
problem for the flowtime
minimization. To achieve this goal with the least bias
possible, the schema of the flowtime constraint is the
same for all relaxations. In fact, from one relaxation
to another, the only change in the filtering algorithm is
the computation of the lower bound which is done by
solving the relaxation. For simplification purposes,
from now on, the solution of the relaxation will be
considered as a black box. The algorithms for solving
the different relaxations are described in Section 3.3.
The filtering of the flowtime constraint is com-
posed of two rules which are described in Sections 4.2
and 4.3. The first one is the update of the lower bound
of F, F. The second one is the filtering of the bounds
of the domains of the S
1
, . . . , S
n
variables, the vari-
ables representing the starting times of the tasks. To
illustrate the filtering algorithm of the flowtime con-
straint, the following running example is used.
Example 1 (An optimal solution of 1|r
j
;d
j
|
∑
C
j
).
The instance of 1|r
j
;d
j
|
∑
C
j
used for this example is
described in Table 1. T
j
represents the task j, p
j
its
duration, r
j
its release date and d
j
its deadline.
Table 1: Instance of 1|r
j
;d
j
|
∑
C
j
with six tasks.
T
j
1 2 3 4 5 6
p
j
14 5 2 3 6 3
r
j
0 0 1 12 16 17
d
j
24 ∞ 10 ∞ 26 ∞
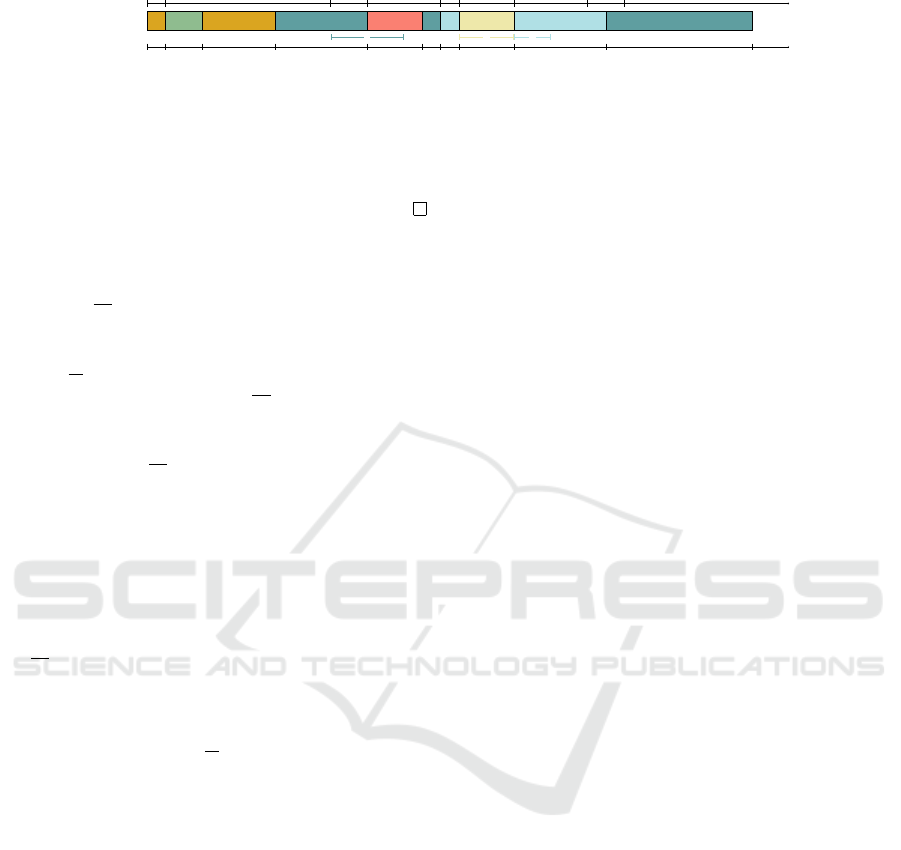
An optimal solution is given in Figure 2 where the
flowtime
∑
C
j
is 129. The tasks are represented by
coloured rectangles. The time is represented on the
lower axis. On this axis, only the times corresponding
to the release dates, deadlines or completion times are
indicated. The upper axis represents the release dates
(positive indices) and deadlines (negative indices) of
the tasks. For instance, the release date of the task
3 is indicated by a 3 on the upper axis at time 1 on
the lower axis and its deadline is indicated by a −3
on the upper axis at time 10 on the lower axis. The
coloured intervals under the tasks are the mandatory
parts, the number of the corresponding task is writ-
ten in the middle. For instance, the dark blue interval
[d
1
− p
1
; p
1
+ r
1
] = [24 − 14; 14 + 0] = [10; 14] is the
mandatory part of task 1 drawn above the lower axis.
4.2 Update the Lower Bound
The first filtering rule updates the lower bound of the
flowtime objective variable. First, a lower bound of
F, F
′
is computed by solving the selected relaxation.
Then, the current lower bound of F, F is updated with
the value of F
′
. Constraint programming solvers au-
tomatically check that there is no contradiction with
F when updating F. It means that if F
′
> F, then the
value of F does not change and the constraint fails.
Example 2 (Flowtime lower bound update). Here
and in Example 4, the problem selected as the re-
laxation is 1|r
j
; pmtn|
∑
C
j
. Let us also assume that
previous choices and deductions have reduced the do-
mains of the S
j
variables as in Table 2. Those values
of S
j
can be used to create the tasks (T
′
j
) with the re-
lease dates r
′
j
and deadlines d
′
j
indicated in Table 2.
Those T
′
j
tasks correspond to the T
j
tasks of Table 1
with their release dates advanced and/or their dead-
line reduced to be able to begin only at a time present
in the domain of the corresponding S
j
variables. The
durations are the same for T
′
j
and T
j
. The values of
r
′
j
and d
′
j
are obtained by those formulas: r
′
j
= S
j
and
d
′
j
= S
j
+ p
j
. It can be noted that T
′
6
is fixed. Let us
also assume that the domain of F has been reduced to
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
74

3 1 6 5 4 2
1 5
t
r
i
, d
i
0 1 3 10 12 16 17 20 24 26 29 34
1
2 3 -3 4 5 6 -1 -5
Figure 2: An optimal schedule of the instance of Table 1 for the 1|r
j
;d
j
|
∑
C
j
problem, where
∑
C
j
= 129.
Table 2: Domains of the S
j
variables and the corresponding
r
′
j
and d
′
j
values.
T
′
j
1 2 3 4 5 6
S
j
[0, 10] [0, 46] [1, 8] [12, 49] [16, 20] [17, 17]
r
′
j
0 0 1 12 16 17
d
′
j
24 51 10 51 26 20
[100,130].
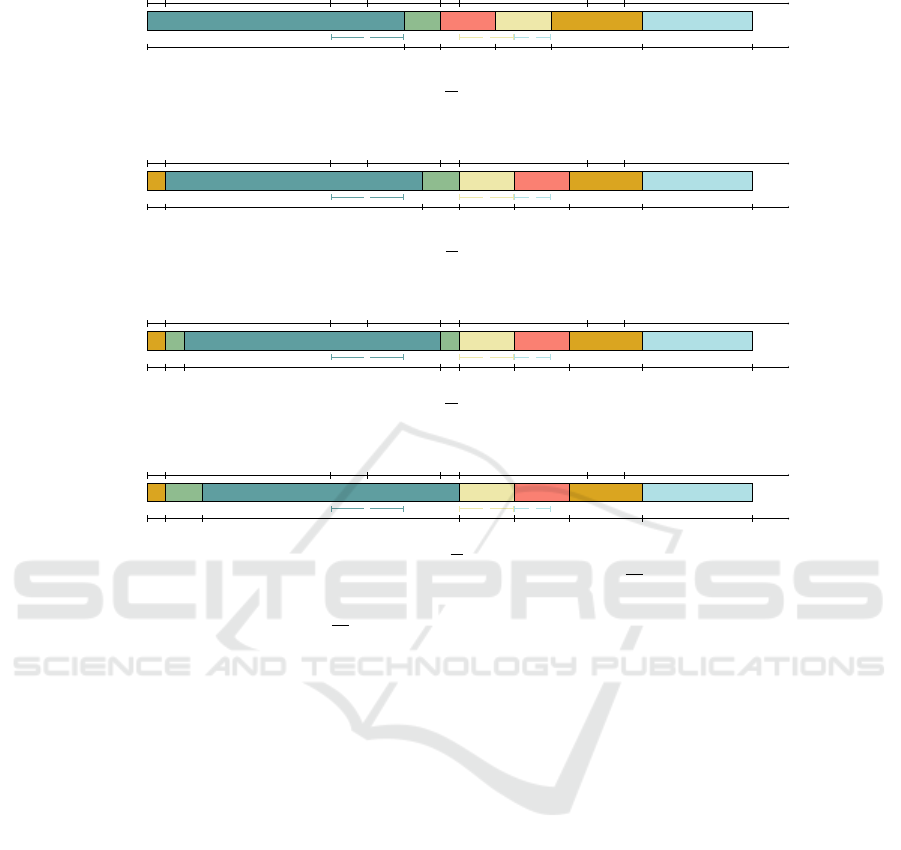
A solution of this relaxation is described in Fig-
ure 3. The value of the lower bound, F
′
found by
the relaxation is 104, it is more than 100, the current
value of F, so the value of F is updated to 104. It
can be noticed that since the 1|r
j
; pmtn|
∑
C
j
relax-
ation does not enforce the respect of the deadlines,
task 1 is late. In the same way, since the respect of
the mandatory parts of the tasks is not a constraint of
1|r
j
; pmtn|
∑
C
j
, some tasks are not executed on their
mandatory part even if they should. This observation
is also true for fixed tasks. This is the reason why the
integration of mandatory parts will also be evaluated.
4.3 Filtering the Bounds of the Domains
of the Start Time Variables
The second filtering rule of flowtime updates the
bounds of the domain of the start time variables, S
j
.
For sake of simplification, only the filtering of the
lower bounds is presented. The algorithm for filter-
ing the upper bounds is symmetric to Algorithm 1.
For each T
′
j
, the algorithm schedules T
′
j
without
preemption from its earliest starting time (i.e. S
j
).
This time is noted t in the following. It then tries to
schedule the other tasks around T
′
j
following the solv-
ing algorithm of the relaxation. The optimality proof
of schedule for the relaxation with T
′
j
fixed is similar
to those for the mandatory parts (Bonnin et al., 2022).
If the objective value found by the relaxation is
strictly bigger that F, then there is no feasible solution
for which T
′
j
begins at time t and t is filtered from the
domain of S
j
. Indeed, as the objective value found by
the relaxation is a lower bound of F if T
′
j
begins at
time t, then a similar reasoning than what is done in
Section 4.2 can be made.
It can also happen that the relaxation does not have
a solution. For instance, if T
′
j
is scheduled on the
mandatory part of another task and the relaxation en-
Algorithm 1: Filtering algorithm of S
1
, . . . , S
n
.
Data: {S
1
, . . . , S
n
}, {p
1
, . . . , p
n
}, F
Result: Updated {S
1
, . . . , S
n
}
{T
′
1
, . . . , T
′
n
} ← the tasks created from {S
1
,
. . . , S
n
} and {p
1
, . . . , p
n
};
for j ← 1 to n do
t ← S
j
;
while t ≤ S
j
do
relax
j,t
← value of the objective
found by solving the relaxation
while setting T
′
j
to be executed in [t,
t + p
j
];
if relax
j,t
= ∅ or relax
j,t
> F then
t ← t + 1;
else break;
S
j
← t
sure the respect of mandatory parts. In this case, there
is no feasible solution for which T
′
j
begins at time t, t
is then filtered from the domain of S
j
.
In the other case, if there is a solution and the ob-
jective value computed by the relaxation is no bigger
than F, a support can be found in which T
′
j
begins at
time t, so no deduction is made. It is then not possible
to filter more the lower bound of S
j
, so the algorithm
stops for this task and start looking at the next task.
Proposition 3. The complexity of Algorithm 1 is O(n ·
M ·R) where M = max
j
(|S
j
|) and R is the complexity
of the relaxation algorithm.
Proof. Creating one task T
′
j
is an O(1) operation. It
is repeated for each of the n tasks to be created. So
the first line has an O(n) complexity.
For the loop, the action is repeated for all n tasks.
The first and last line of the for loop are assigna-
tions that take O(1), so the complexity is bounded
by the complexity of the while loop. The while loop
is repeated at most for all possible values of the do-
main of S
j
(from S
j
to S
j
), and so at a maximum
of M = max
j
(|S
j
|) times. Setting the task to be ex-
ecuted in [t,t + p
j
] and computing the relaxation can
be done with the same complexity R as simply com-
puting the relaxation by the same argument as what
is done in (Bonnin et al., 2022). The if and else parts
are only simple tests and assignations and so have an
O(1) complexity. The complexity of the for loop is
Toward a Global Constraint for Minimizing the Flowtime
75
2 3 2 1 4 1 5 6 5 1
1 56
t
r
i
, d
i
0 1 3 7 12 15 16 17 20 25 33
1
2 3 -3 4 5 6 -6 -1 -5
Figure 3: An optimal solution of the 1|r
j
; pmtn|
∑
C
j
relaxation for the T
′
j
tasks, where
∑
C
j
= 104.
then bound by O(n · M ·R).
The complexity of Algorithm 1 is then bound by
O(n · M · R) where M = max
j
(|S
j
|) and R is the com-
plexity of the relaxation algorithm.
Example 4 (Execution of Algorithm 1). This exam-
ple uses the same values as Example 2 and only the
filtering of S
1
is given. Figure 4 shows the results of
the relaxation at each step of the algorithm. At steps
1, 2, and 3, where t = 0, 1, and 2 respectively, the ob-
jective value of the relaxation is strictly greater than
those of F, 130. So the value of S
1
is updated to 3. But
at step 4, where t = 3, the objective value of the relax-
ation is no greater than 130, it is not possible to filter
more the value of S
1
and the algorithm stops looking
at T
′
1
and begins examining the next task.
A choice is made in Algorithm 1 to only filter the
bounds of the S
j
variables as a classical representation
of a task in constraint programming is an interval vari-
able for which most of the solvers only allow bounds
filtering. Algorithm 1 is a naive version of a filter-
ing rule for flowtime as it tests each possible value
for S
j
. Once the promising relaxations are identified,
specific rules or algorithms should be designed for
those relaxations. To obtain the complete filtering al-
gorithm of the flowtime constraint, the bound update
of Section 4.2 must be executed first. Then, if there
is no contradiction with F, the lower bounds of the
S
j
variables must be updated with Algorithm 1 and
the last step is to update the upper bounds of the S
j
variables with a symmetric algorithm to Algorithm 1.
5 EXPERIMENTAL RESULTS
This section aims to evaluate the relaxations and filter-
ing rules available for the global constraint flowtime.
The experiment framework is defined so the follow-
ing questions are addressed: Q1. Which relaxation is
the best proving the optimality or finding good upper
bounds? Q2. What are the performance trade-offs be-
tween the propagation of the lower bound and the fil-
tering of the starting times? In terms of solving time?
Number of branches? Q3. What is the efficiency of
the constraint depending on the problem?
Section 5.1 describes the experimental protocol
with the alternatives for the flowtime constraint. The
constraint is evaluated on two flowtime minimization
problems: a single machine problem in Section 5.2;
and a permutation flowshop problem in Section 5.3.
5.1 Experimental Protocol
The following alternatives are considered for the
global constraint flowtime: sum uses a stan-
dard sum constraint for propagating the flowtime;
pmtnFlow propagates the lower bound as presented
in Section 4.2 using 1|r
j
; pmtn|
∑
C
j
; pmtnBusy
propagates the lower bound using 1|r
j
; pmtn|
∑
M
j
;
mandFlow propagates the lower bound using
1|r
j
; pmtn; mand|
∑
C
j
; mandBusy propagates
the lower bound using 1|r
j
; pmtn; mand|
∑
M
j
;
norelFlow propagates the lower bound using
1|d
j
|
∑
C
j
; filtFlow does as pmtnFlow but also
filters the starting times as presented in Sec-
tion 4.3 using 1|r
j
; pmtn|
∑
C
j
; filtBusy does
as pmtnBusy and filters the starting times using
1|r
j
; pmtn|
∑
M
j
; complBusy adapts the Completion
constraint (Kov
´
acs and Beck, 2011), which uses
1|r
j
; pmtn|
∑
M
j
, as described in the following.
The proposed alternatives have been implemented
as a global constraint in C++ and embedded into
IBM ILOG CPLEX Optimization Studio 22.1 (IBM,
2023). All models state the standard sum constraint
and a noOverlap constraint. The noOverlap con-
straint sets the resource capacity enforcement and
uses the default inference techniques.
The Completion constraint proposed in (Kov
´
acs
and Beck, 2011, complBusy) has been made com-
patible with the latest version of CP Optimizer with
the minimum possible changes on the code. Indeed,
the IlcActivity type is not available anymore because
it has been replaced by IloIntervalVar. IlcActivity
allowed to remove values from an enumerated do-
main, creating holes, but IloIntervalVar only accepts
changes on the bounds of its interval domain. The
Completion constraint has then been adapted to use
IloIntervalVar variables instead of IlcActivity ones.
Therefore, keep in mind that the original constraint
has been weakened as it only updates the bounds of
the domains. For the same reason, the version tested
is not optimized, so the time results for complBusy
should be read as upper bounds and not precise mea-
sures.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
76
1 3 4 6 2 5
1 56
t
r
i
, d
i
0 14 16 19 22 27 33
1
2 3 -3 4 5 6 -1 -5
(a) Step 1 : t = 0, relax
1,0
= 131 > 130(= F) : 0 can be filtered from the domain of S
1
.
2 1 3 6 4 2 5
1 56
t
r
i
, d
i
0 1 15 17 20 23 27 33
1
2 3 -3 4 5 6 -1 -5
(b) Step 2 : t = 1, relax
1,1
= 135 > 130(= F) : 1 can be filtered from the domain of S
1
.
2 3 1 3 6 4 2 5
1 56
t
r
i
, d
i
0 1 2 16 17 20 23 27 33
1
2 3 -3 4 5 6 -1 -5
(c) Step 3 : t = 2, relax
1,2
= 136 > 130(= F) : 2 can be filtered from the domain of S
1
.
2 3 1 6 4 2 5
1 56
t
r
i
, d
i
0 1 3 17 20 23 27 33
1
2 3 -3 4 5 6 -1 -5
(d) Step 4 : t = 3, relax
1,3
= 123 ≤ 130(= F) : STOP, a support of S
1
has been found.
Figure 4: Example of the filtering rule of the lower bound of S
1
variable (second rule) with the 1|r
j
; pmtn|
∑
C
j
relaxation.
The example uses the instance of Table 2 and S
1
, whose previous value was 0, is updated to 3.
Only results obtained using a CP model are pre-
sented as results obtained by implementing a classical
MIP time-indexed model (Keha et al., 2009) with the
same configuration are always at least 2 times slower
than those obtained using the sum alternative.
All experiments were run on a Dell computer with
256 GB of RAM and 4 Intel E7-4870 2.40 GHz pro-
cessors running on CentOS Linux release 7.9 (each
processor has 10 cores). The parallelism is disabled
in order to ease the comparative analysis. Last, the
time limit is 1000 seconds for each run.
5.2 Single Machine Problem
The problem instances for the single machine prob-
lem have been proposed in (Pan and Shi, 2008)
for 1|r
j
|
∑
w
j
C
j
and also used in (Kov
´
acs and Beck,
2011). The repository contains 10 problem instances
for each combination of parameters n and R, where n
is the number of tasks, while R is the relative range of
the release date. We have selected all 900 instances
with fewer than 100 tasks for every relative range.
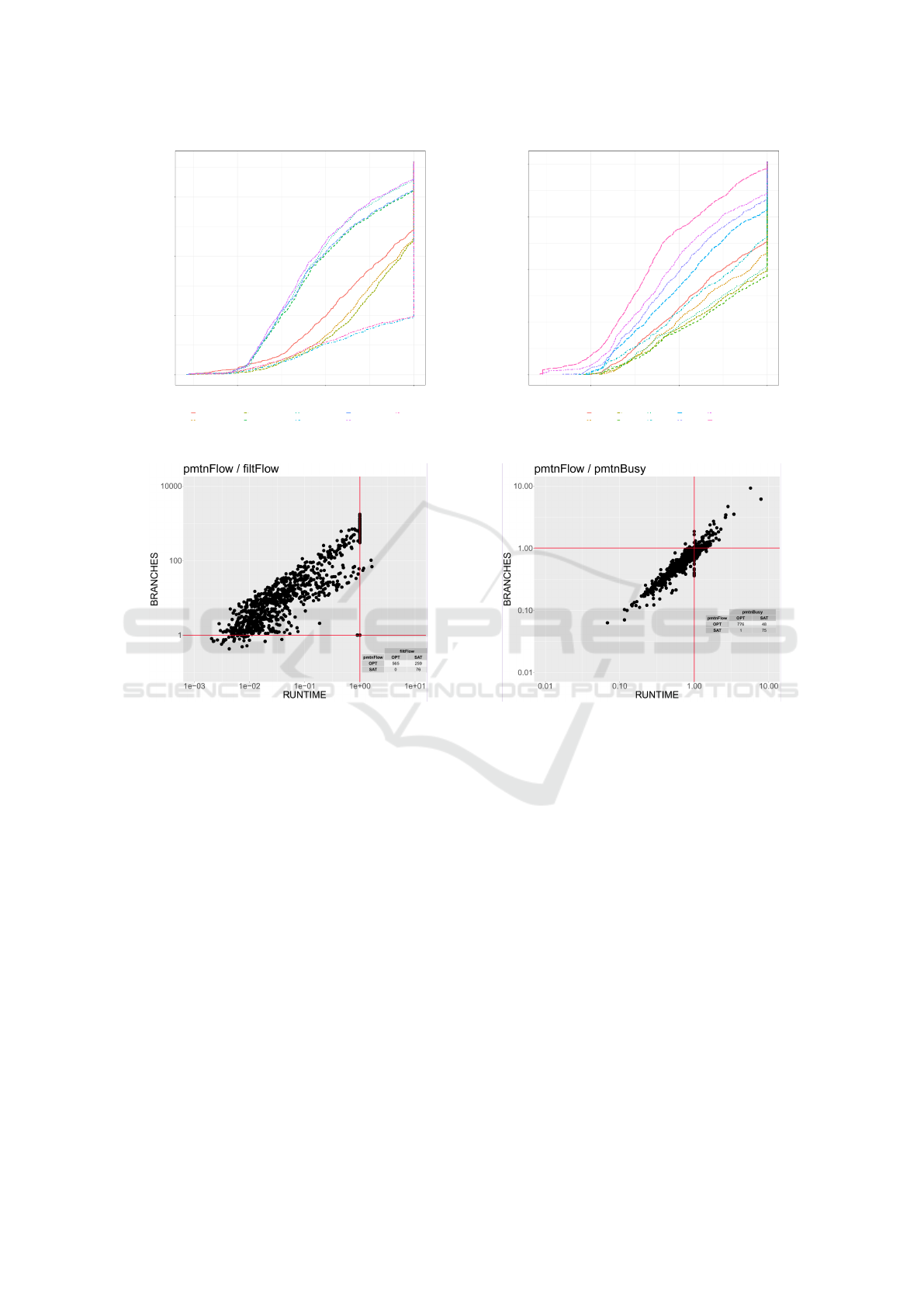
Figure 5a gives the number of instances optimally
solved depending on the time grouped by alternative.
All instances that have reached the time limit are in
the vertical line at time 1e +03. A faster alternative is
above and on the left of a slower alternative. Clearly,
the alternatives sum and norelFlow are the worst al-
ternatives because they only optimally solve around
250 instances over 900 and are an order of magnitude
slower than the other alternatives. So, the alternative
norelFlow can be discarded as inefficient in future
work. The alternatives that filter the starting times im-
prove the efficiency by optimally solving more than
500 instances. The alternative filtBusy is slightly
faster than filtFlow, and they are both slightly less
efficient and slower than complBusy. It shows an in-
terest in the incrementality of the filtering compared
to our more naive, but simpler, approach. Currently,
the alternatives that only propagate the lower bound
are the most efficient and the fastest. Surprisingly, the
integration of the mandatory part does not give any
significant improvement. To conclude, pmtnFlow is
the most efficient closely followed by pmtnBusy. Fil-
tering the starting times takes too much time and leads
to fewer optimality proofs even when the filtering is
incremental as in complBusy.
Figure 5b gives the number of instances optimally
solved depending on the time it took grouped by the
relative range R of the release dates. The relative
Toward a Global Constraint for Minimizing the Flowtime
77
0
250
500
750
1e−01 1e+01 1e+03
RUNTIME
Count
a
complBusy
filtBusy
filtFlow
mandBusy
mandFlow
norelFlow
pmtnBusy
pmtnFlow
sum
(a) Alternatives survival plot.
0
200
400
600
800
1e−01 1e+01 1e+03
RUNTIME
Count
R
0.20
0.40
0.60
0.80
1.00
1.25
1.50
1.75
2.00
3.00
(b) Relative range survival plot.
(c) pmtnFlow versus filtFlow. (d) pmtnFlow versus pmtnBusy.
Figure 5: Experimental results for the single machine problem.
range is relevant with respect to the problem hard-
ness because the curves can be easily distinguished.
The easiest instances have the greatest ranges (3.00,
2.00, 1.75, 1.50, 1.25) because, for a given time win-
dow, only a few tasks overlap, reducing the degree
of freedom for scheduling. Then, instances that have
the lowest ranges (0.20, 0.40) are also pretty easy, be-
cause the problem becomes close to 1||
∑
C
j
and the
relaxation is likely to give good lower bounds. Fi-
nally, the middle ranges (0.60, 0.80, 1.00) lead to the
hardest instances because the relaxation is weaker and
the degree of freedom for scheduling remains high.
In Figures 5c and 5d, each point represents one in-
stance and its x coordinate is the ratio of the solving
time of the first alternative over the solving time of
the second alternative, whereas its y coordinate is the
ratio of the branches. Notice also that both scales are
logarithmic. All points located above and on the right
of the point (1,1) are instances improved by the sec-
ond alternative. On the contrary, all points located be-
low and on the left of the point (1,1) are instances im-
proved by the first alternative (bottom-left quadrant).
As expected, all points are around the diago-
nal as the number of nodes is roughly proportional
to the time (top-left and bottom-right quadrants are
empty). Figure 5c shows that filtering the starting
times (filtFlow) reduces by an order of magnitude
on the number of branches compared to the propa-
gation of the lower bound (pmtnFlow), but it is so
slow that the solving time remains larger by an order
of magnitude. Therefore, filtering the starting times
is promising, but this requires further improvements
beyond the incrementality.Figure 5d shows that the
relaxation with the flowtime gives more optimality
proofs, explores fewer branches and is faster than the
relaxation with the mean busy time.
Table 3 summarizes the experimental results as in
(Kov
´
acs and Beck, 2011). Each row contains com-
bined results for the 10 instances with the same num-
ber of activities, n, and release time range, R. For
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
78
Table 3: Experimental results for four alternatives on single machine problems.
Problem sum pmtnFlow filtFlow complBusy
n R o b t o b t o b t o b t
20 0.2 – – – 10 14.7K 0.3 10 0.8K 1.8 10 0.9K 0.1
0.6 3 10.0M 292.5 10 23.8K 0.5 10 2.8K 5.2 10 8.7K 3.2
1.0 10 1.9M 57.1 10 14.6K 0.3 10 6.1K 8.7 10 9.0K 2.7
1.5 10 81.4K 2.0 10 7.5K 0.2 10 2.2K 3.4 10 4.2K 0.8
2.0 10 9.2K 0.2 10 5.6K 0.1 10 1.9K 1.4 10 2.8K 0.5
30 0.2 – – – 10 30.1K 0.9 10 1.5K 10.3 10 3.5K 1.7
0.6 – – – 10 43.0K 1.2 10 3.9K 26.1 10 16.5K 19.3
1.0 2 2.5M 101.4 10 45.6K 1.6 10 16.2K 69.2 10 25.9K 37.8
1.5 9 494.7K 17.7 10 11.2K 0.3 10 5.4K 15.6 10 9.4K 2.2
2.0
10 81.3K 2.7 10 10.2K 0.3 10 5.3K 14.0 10 7.8K 1.1
40 0.2 – – – 10 34.0K 1.4 10 3.0K 44.1 10 13.5K 12.5
0.6 – – – 10 94.4K 4.1 10 8.2K 116.3 10 82.4K 90.5
1.0 2 7.5M 368.8 10 43.7K 2.0 10 12.9K 82.0 10 44.0K 19.9
1.5 10 1.4M 64.8 10 13.8K 0.5 10 7.5K 38.7 10 23.8K 6.4
2.0 9 191.4K 7.8 10 13.1K 0.5 10 5.8K 27.8 10 10.4K 8.8
50 0.2 – – 10 52.4K 3.7 10 6.3K 171.8 10 48.6K 39.5
0.6 – – – 10 213.8K 12.3 8 14.5K 383.1 10 282.5K 291.1
1.0 – – – 10 2.2M 143.8 5 31.9K 423.1 5 199.7K 331.7
1.5 4 2.5M 118.6 10 70.2K 4.4 10 18.8K 168.7 10 75.3K 158.0
2.0 8 630.0K 31.3 10 18.6K 0.9 10 8.1K 74.0 10 18.0K 10.49
60 0.2 – – – 10 109.1K 9.1 6 10.8K 517.0 8 150.8K 239.2
0.6 – – – 10 1.3M 107.1 2 12.9K 662.9 – – –
1.0 – – – 9 342.1K 26.3 6 21.9K 528.2 3 150.7K 784.3
1.5 – – – 10 32.6K 2.2 10 16.3K 199.4 10 36.8K 32.5
2.0 6 3.7M 187.6 10 24.0K 1.2 10 6.8K 88.9 10 41.4K 14.7
70 0.2 – – – 10 430.1K 40.0 3 10.1K 674.8 3 69.7K 632.1
0.6 – – – 8 2.7M 267.1 – – – – – –
1.0 – – – 10 2.1M 192.0 2 38.1K 831.4 2 197.3K 332.3
1.5 – – – 10 119.1K 10.1 8 26.0K 488.0 9 174.7K 215.1
2.0 3 5.2M 312.2 10 41.0K 2.7 10 20.3K 291.1 10 52.8K 55.0
each of the 4 alternatives, the table displays the num-
ber of instances that were solved to optimality (col-
umn o), the average number of branches (b), and the
average search time in seconds (t). The averages are
computed only on the instances that the algorithm op-
timally solved. Table 3 confirms that the 3 alternatives
for the flowtime constraint are more efficient and re-
duce the number of branches compared to the sum
constraint. More and larger instances are optimally
solved in Table 3 than in (Kov
´
acs and Beck, 2011)
where only a few instances with 50 tasks or more are
optimally solved. The comparison between the prop-
agation of the lower bound (pmtnFlow) and the filter-
ing of the starting times (filtFlow and complBusy)
also differs. In (Kov
´
acs and Beck, 2011), the fil-
tering of the starting times outperforms the propa-
gation of the lower bound in terms of the number
of optimality proofs, solving times, and number of
branches. The reason is not obvious, but could in-
clude the change of objective function, or our adapta-
tion of the completion constraint.
The detailed results are not given here, but the sit-
uation is similar when comparing the upper bounds
on instances that are not optimally solved.
To conclude on the single machine, 1|d
j
|
∑
C
j
is not efficient, but other preemptive relaxations are
more efficient in terms of solving time and reducing
the number of branches, with a slight advantage for
the flowtime over the mean busy time. Mandatory
parts do not have much practical importance for fil-
tering the starting times. Still, the results obtained
using 1|d
j
|
∑
C
j
and, to some extent, the mandatory
part might be biased due to instances lacking dead-
lines. Last, filtering the starting times is not yet effi-
cient enough to balance the additional time required
for it compared to the lower bound propagation. Yet,
it drastically reduces the number of branches which
is promising for designing more efficient algorithms
through incrementality and triggering.
5.3 Flowshop Problem
The flowshop problem consists of determining a pro-
cessing sequence of n tasks in a set of m machines
that are arranged in series. All tasks must be pro-
cessed sequentially in all machines. Each task needs
a given processing time at each machine. A flowshop
is a common production setting in factories where
products start processing at machine or stage 1 and
continue processing until they are finished in the last
machine. The permutation flowshop problem also as-
sumes that the production sequence of tasks for the
first machine is kept unaltered for all other machines.
The 300 instances have between 5 and 20 ma-
Toward a Global Constraint for Minimizing the Flowtime
79

chines: 60 instances of (Taillard, 1993) have between
20 and 50 jobs; and 240 instances of (Vallada et al.,
2015) have between 10 and 60 jobs. Table 4 and Ta-
ble 5 present the experimental results for the flowshop
for five relevant alternatives identified in Section 5.2.
Table 4 gives for each alternative the number of in-
stances solved optimally, the average search time (in
seconds), the average number of branches, and their
standard deviations. Those last four values are com-
puted over the optimally solved instances only, other-
wise, the time limit is reached and these are not sig-
nificant. It shows that the improvement provided by
the global constraint is not as significant as for the sin-
gle machine problem. In fact, pmtnFlow is the quick-
est to prove the optimality, followed by complBusy
and pmtnBusy, then sum and filtFlow is the one that
takes the longest by far. However, pmtnFlow is doing
one fewer proof than complBusy, pmtnBusy, and sum,
and filtFlow is doing very fewer proofs than the oth-
ers. In terms of the number of branches, filtFlow is
doing smaller proofs, but as it does less than 3/5 of
the proofs done by the other alternatives, the compar-
ison is hard to do. As expected, for the other alterna-
tives, complBusy is the one with the fewer branches,
followed by pmtnFlow, then pmtnBusy, and by far
sum. Note that at most 36 instances over 300 are op-
timally solved as even the smallest flowshop instance
has more operations (100) than the bigger instances
tested for the single machine problem.
Table 4: Time and number of branches per alternative.
Alternative Opt Time (s) Branches
a o avg std avg std
sum 36 317 269 2.26M 1.60M
pmtnBusy 36 257 244 1.86M 1.43M
pmtnFlow 35 237 228 1.67M 1.25M
complBusy 36 257 231 1.28M 1.03M
filtFlow 21 412 336 0.54M 0.46M
Table 5 summarizes the relative error of each al-
ternative over all instances. The relative error for an
instance is the ratio of the absolute error to the best
known objective value for this instance. For each al-
ternative (column a), the table displays the number
of the instances optimally solved (column o), the av-
erage relative error (avg), and its standard deviation
(std) in per-thousand. The averages are computed
over all 300 instances. For the relative error, the al-
ternative sum gives the best results closely followed
by pmtnBusy, and less closely by pmtnFlow. The fil-
tering of the starting times gives significantly worse
upper bounds (complBusy and mostly filtFlow).
A possible explanation is that the instances for the
flowshop problem are larger and harder than those for
the single machine so the search speed becomes more
Table 5: Mean relative error (over all instances).
a o avg (‰) std (‰)
sum 36 0.48 0.63
pmtnBusy 36 0.50 0.66
pmtnFlow 35 0.55 1.19
complBusy 36 1.35 2.18
filtFlow 21 5.01 4.76
important than the propagation strength for finding
good upper bounds. Furthermore, many scheduling
decisions, even for the permutation flowshop, have
less influence over the relaxation because they con-
cern earlier machines. Indeed, the schedule of the last
machine entirely determines the flowtime and it de-
pends on the schedule of all previous machines, giv-
ing less visibility to the bound and the filtering. It
shows that even the propagation of the lower bound
should be more carefully triggered to save time and
that filtering the relative order of tasks could help as
in most global constraints for scheduling.
To conclude this section, the flowtime constraint
helps to improve the performances of the solver on
single machine problems. However those results do
not carry to more complex scheduling problems like
the flowshop problem. The main part to improve is the
filtering part as it considerably reduces the number of
branches, but currently takes too much time.
6 CONCLUSIONS
This article proposes a global constraint minimizing
the flowtime that allows using multiple polynomial
relaxations of 1|r
j
;d
j
|
∑
C
j
. For now, the flowtime
constraint is more efficient than a standard sum con-
straint on a single machine problem but only has a
moderate effect on the flowshop problem. The exper-
imental results have identified the most efficient re-
laxations and shown that filtering the starting times
takes too long to improve the solving times despite
reducing the number of branches.
This work opens new perspectives for designing
more efficient filtering rules and algorithms for the
flowtime constraint. First, incremental filtering of
the starting times would improve the performances
but is not enough for compensating the additional
time. Second, the events that trigger the filtering are
key to efficiency because most of the filtering stages
do not reduce the domains. Third, the detection of
precedences between tasks may strengthen the filter-
ing while reducing the number of steps as in the dis-
junctive constraint. Finally, the last avenue is to inte-
grate the last untested relaxation 1|sp-graph|
∑
w
j
C
j
that is not solved by a priority list algorithm.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
80

ACKNOWLEDGEMENTS
We thank Andr
´
as Kov
´
acs and J. Christopher Beck for
sharing their code, and the latter for his advice.
REFERENCES
Aggoun, A. and Beldiceanu, N. (1993). Extending chip
in order to solve complex scheduling and placement
problems. Math Comput Model.
Awerbuch, B., Azar, Y., Leonardi, S., and Regev, O. (2002).
Minimizing the flow time without migration. SIAM J
Comput.
Baptiste, P., Laborie, P., Pape, C. L., and Nuijten, W. (2006).
Constraint-based scheduling and planning. In Rossi,
F., van Beek, P., and Walsh, T., editors, Handbook
of Constraint Programming, Foundations of Artificial
Intelligence. Elsevier.
Baptiste, P., Le Pape, C., and Nuijten, W. (2001a).
Constraint-based scheduling: applying constraint
programming to scheduling problems. Springer Sci-
ence & Business Media.
Baptiste, P., Le Pape, C., and Nuijten, W. (2001b).
Constraint-based scheduling: applying constraint
programming to scheduling problems. Int Ser Oper
Res Man. Springer.
Bewoor, L. A., Prakash, V. C., and Sapkal, S. U. (2018).
Production scheduling optimization in foundry using
hybrid particle swarm optimization algorithm. Proce-
dia Manuf.
Bonnin, C., Nattaf, M., Arnaud, A. M., and Espinouse, M.-
L. (2022). Extending smith’s rule with task mandatory
parts and release dates. In PMS 2022.
Brucker, P. (2004). Single Machine Scheduling Problems.
Springer Berlin, Heidelberg.
Carlier, J. (1982). The one-machine sequencing problem.
Eur J Oper Res.
Carlier, J. and Pinson,
´
E. (1990). A practical use of jack-
son’s preemptive schedule for solving the job shop
problem. Ann Oper Res.
Chen, B., Potts, C. N., and Woeginger, G. J. (1998). A Re-
view of Machine Scheduling: Complexity, Algorithms
and Approximability. Springer US.
Cho, B.-H., Athar, H. M., Bates, L. G., Yarnoff, B. O., Har-
ris, L. Q., Washington, M. L., Jones-Jack, N. H., and
Pike, J. J. (2023). Patient flow time data of covid-19
vaccination clinics in 23 sites, united states, april and
may 2021. Vaccine.
Du, J. and Leung, J. Y. (1993). Minimizing mean flow time
with release time and deadline constraints. J Algo-
rithm.
Fahimi, H. and Quimper, C.-G. (2014). Linear-time filtering
algorithms for the disjunctive constraint. Proceedings
of the AAAI Conference on Artificial Intelligence.
Focacci, F., Lodi, A., and Milano, M. (1999). Cost-based
domain filtering. In Jaffar, J., editor, Lect Notes Com-
put SC. Springer Berlin Heidelberg.
Gay, S., Hartert, R., and Schaus, P. (2015). Simple and scal-
able time-table filtering for the cumulative constraint.
In Pesant, G., editor, Lect Notes Comput SC. Springer
International Publishing.
Graham, R., Lawler, E., Lenstra, J., and Kan, A. (1979).
Optimization and approximation in deterministic se-
quencing and scheduling: a survey. In Hammer, P.,
Johnson, E., and Korte, B., editors, Discrete Optim II,
Annals of Discrete Mathematics. Elsevier.
IBM (2023). Cplex optimisation studio 22.1. https://www.
ibm.com/products/ilog-cplex-optimization-studio.
Keha, A., Khowala, K., and Fowler, J. (2009). Mixed in-
teger programming formulations for single machine
scheduling problems. Comput Ind Eng.
Kov
´
acs, A. and Beck, J. C. (2011). A global constraint for
total weighted completion time for unary resources.
Constraints.
Labetoulle, J., Lawler, E., Lenstra, J., and Rinnooy Kan, A.
(1984). Preemptive scheduling of uniform machines
subject to release dates. In Progress in combinatorial
optimization. Academic Press.
Lahrichi, A. (1982). Ordonnancements. la notion de parties
obligatoires et son application aux probl
`
emes cumu-
latifs. RAIRO-Oper Res.
Lawler, E. (1978). Sequencing jobs to minimize total
weighted completion time subject to precedence con-
straints. In Alspach, B., Hell, P., and Miller, D., ed-
itors, Algorithmic Aspects of Combinatorics, Ann. of
Discrete Math. Elsevier.
Lenstra, J., Rinnooy Kan, A., and Brucker, P. (1977). Com-
plexity of machine scheduling problems. Ann. of Dis-
crete Math.
Lenstra, J. K. (accessed in 2023). Unpublished. http:
//schedulingzoo.lip6.fr/ref2bibtex.php?ID=Lenstra::.
Lenstra, J. K. and Rinnooy Kan, A. (1978). Complexity of
scheduling under precedence constraints. Oper Res.
Letort, A., Beldiceanu, N., and Carlsson, M. (2012). A scal-
able sweep algorithm for the cumulative constraint. In
Milano, M., editor, Lect Notes Comput SC. Springer
Berlin Heidelberg.
Pan, Y. and Shi, L. (2008). New hybrid optimization al-
gorithms for machine scheduling problems. IEEE T
Autom Sci Eng.
Pinedo, M. L. (2012). Scheduling: theory, algorithms, and
systems. Springer New York, NY.
Stewart, R., Raith, A., and Sinnen, O. (2023). Optimising
makespan and energy consumption in task scheduling
for parallel systems. Comput Oper Res.
Strusevich, V. A. (2022). Complexity and approximation of
open shop scheduling to minimize the makespan: A
review of models and approaches. Comput Oper Res.
Taillard,
´
E. (1993). Benchmarks for basic scheduling prob-
lems. Eur J Oper Res.
Vallada, E., Ruiz, R., and Framinan, J. M. (2015). New hard
benchmark for flowshop scheduling problems min-
imising makespan. Eur J Oper Res.
Vil
´
ım, P. (2004). O(nlogn) filtering algorithms for unary
resource constraint. In R
´
egin, J.-C. and Rueher, M.,
editors, Lect Notes Comput SC. Springer Berlin Hei-
delberg.
Toward a Global Constraint for Minimizing the Flowtime
81
