Automatic Detection and Classification of Atmospherical Fronts
Andreea Alina Ploscar
a
, Anca Ioana Muscalagiu
b
, Eduard Timotei Pauliuc
c
and Adriana Mihaela Coroiu
d
Department of Computer Science, Babes
,
-Bolyai University, M. Koganiceanu 1 Street, Cluj-Napoca, Romania
Keywords:
Atmospherical Fronts, Detection, Classification, Convolutional Neural Network.
Abstract:
This paper presents an application that uses Convolutional Neural Networks (CNN) for the automatic detection
and classification of atmospherical fronts in synoptic maps, which are a graphical representation of weather
conditions over a specific geographic area at a given point in time. These fronts are significant indicators of
meteorological characteristics and are essential for weather forecasting. The proposed method takes in a region
extracted from a synoptic map to detect and classify fronts as cold, warm, or mixed, setting our study apart
from existing literature. Furthermore, unlike previous research that typically utilizes atmospheric data grids,
our study employs synoptic maps as input data. Additionally, our model produces a single output, accurately
representing the front type with a 78% accuracy rate. The CNN model was trained on data collected from
various meteorological stations worldwide between 2013 and 2022. The proposed tool can provide valuable
information to weather forecasters and improve their accuracy.
1 INTRODUCTION
The atmospheric front (or air front) represents the
transition between two air masses different in den-
sity or temperature. Their contact can cause radical
weather changes, such as precipitation, temperature,
or pressure variations. The difference in temperature
between the two air groups that an atmospheric front
separates determines what kind of front it is. Cold
fronts, warm fronts, and occluded fronts are the three
major types of atmospheric fronts. Apart from these
types, there exists an additional category, stationary
fronts, which have similar characteristics to occluded
fronts, having in common the mix of warm and cold
air masses. For the purpose of this study, we will
consider both occluded and stationary fronts as mixed
air fronts. The type of the front is determined by the
dominating type of air mass: cold or warm. When a
cold air mass approaches a warm air mass, the warm
air mass is forced to ascend quickly, creating a cold
front. Warm air rises, cools, condenses, and forms
clouds and precipitation as a consequence of conden-
sation. When a warm air mass approaches a cold air
mass, the warm air gently rises over the denser, colder
a
https://orcid.org/0009-0009-6021-3538
b
https://orcid.org/0009-0000-3139-4311
c
https://orcid.org/0009-0007-7450-0824
d
https://orcid.org/0000-0001-5275-3432
air. This is known as a warm front. As a conse-
quence, a wide band of clouds and light precipitation
are formed. When a chilly front passes by, it becomes
obscured.
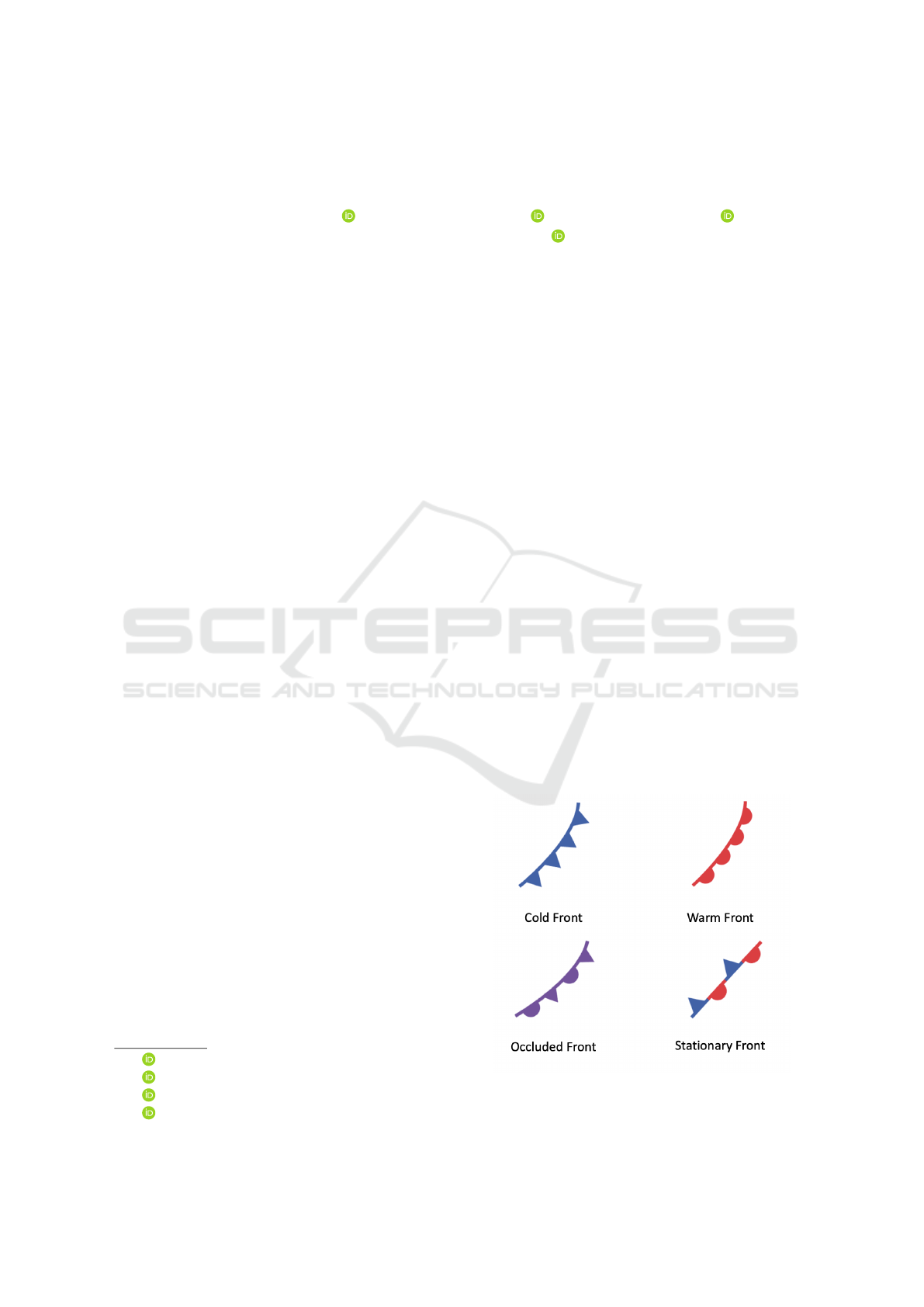
In synoptic-type weather maps (Bergeron, 1980),
the two air masses are delimited by continuous lines,
and the type of air front is determined by different ge-
ometric shapes: semicircles for warm fronts, triangles
for cold fronts, and alternating triangles and semicir-
cles for mixed fronts.
Figure 1: Types of Fronts.
94
Ploscar, A., Muscalagiu, A., Pauliuc, E. and Coroiu, A.
Automatic Detection and Classification of Atmospherical Fronts.
DOI: 10.5220/0012306700003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 94-100
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Accurate detection of atmospheric fronts holds
significant importance for meteorologists and weather
forecasters as it enables precise weather predictions
and timely warnings. By monitoring these fronts,
forecasters can anticipate weather patterns and effec-
tively communicate potential hazards like thunder-
storms, blizzards, or floods to the public. In our study,
the primary research question revolves around the
possibility of classifying atmospheric fronts within a
smaller area (less than 350,000 sq km) using a CNN
with an accuracy exceeding 60%.
This paper aims to use Convolutional Neuronal
Networks on synoptic maps collected from meteoro-
logical stations to determine in an automatic manner
the existence and category of fronts over the territory
of a country in a specific moment. Automatic front
detection is a subject addressed very little in the past
years (Niebler et al., 2022) (Matsuoka et al., 2019),
and only for broader territories like Europe and Amer-
ica.
In this paper we propose an intelligent algorithm
for solving the problem of determining and classify-
ing atmospherical fronts, using Convolutional Neural
Networks. The study aims to provide an intuitive,
easy-to-use, and user-friendly tool for specialists in
the meteorological field that will consist aid in fore-
casting different weather characteristics on smaller
regions, such as the territory of a country. To our
knowledge, there have been no studies of the auto-
matic classification of fronts using synoptic maps as
input, therefore the model proposed in this paper aims
to serve as a starting point for further research on front
detection and classification in synoptic maps.
The present work is structured in five chapters as
follows. The first chapter is an introduction to the
problem of air front detection and its meteorologi-
cal importance. Next, the following chapter presents
the current state of the art in this domain, illustrat-
ing a short comparison between the existing papers
and our approach. In the third chapter, we outline
our comprehensive approach, including a detailed ac-
count of our methodology, the dataset collected, the
pre-processing steps undertaken, the network archi-
tecture of our Convolutional Neural Network (CNN),
the training process, as well as an explanation of
the metrics used to evaluate the performance of our
model. Moving on to the fourth chapter, we present
the results of our experiments, highlighting both the
strengths and weaknesses of our model. Finally, we
provide a summary of our findings, outline the limi-
tations of our model, and discuss potential ideas for
further improvements.
2 LITERATURE REVIEW
The detection and classification of air fronts are usu-
ally addressed manually, but the demand for an au-
tomatic approach increased along with the dataset
volume. The detection and classification of weather
fronts using deep learning models is a scarcely ex-
plored field, having only a few published papers in
recent years.
We are presenting two related works that utilize
deep neural networks to detect and classify weather
fronts. The first work ’S. Niebler et al.: Automatic
detection and classification of fronts, 2022’ (Niebler
et al., 2022) focuses on detecting and classifying five
types of fronts (warm front, cold front, occlusion, sta-
tionary front or background) over a large area using
multi-level ERA5 reanalysis data, atmospherical data
grids. The second work is (Matsuoka et al., 2019)
’Daisuke Matsuoka et al.: Automatic detection of sta-
tionary fronts around Japan using a deep convolu-
tional neural network, 2019’ that detects only station-
ary fronts in a smaller area around Japan using GPV-
MSM mesoscale numerical prediction data.
In paper (Niebler et al., 2022) the authors intro-
duced a deep neural network (U-Net) to detect and
classify five types of fronts using atmospheric data
grids provided by ERA5, ECMWF. The input data is
represented as a two-dimensional matrix, where each
cell corresponds to a specific location and time, con-
taining weather parameters. The method used is a
CNN that automatically learns atmospheric features
that correspond to the existence of a weather front.
For each spatial grid point, the algorithm predicts a
probability distribution, the likelihood of the point be-
longing to one of the five classes. The validation is
done through the critical success index (CSI), prob-
ability of object detection (POD), and success rate
(SR). The model obtains prediction scores with a crit-
ical success index higher than 66.9% and an object
detection rate of more than 77.3%. Frontal climatolo-
gies of the network are highly correlated (greater than
77.2%) to climatologies created from weather service
data.
Moreover, Daisuke Matsuoka proposed a U-Net
convolutional neural network that detects only sta-
tionary fronts around Japan (Matsuoka et al., 2019).
The input data are weather data with multiple chan-
nels, and the output front data is a polyline that is
compared with the polylines extracted from label data
to optimize the model. The detection performance
is evaluated by calculating the similarity between the
prediction result and the ground truth based on the
Tanimoto coefficient. The paper does not specify an
exact estimate of the accuracy, but it provides a vi-
Automatic Detection and Classification of Atmospherical Fronts
95

sual comparison of the ground truth and the detected
fronts. The model succeeded in extracting the approx-
imate shape of seasonal rain fronts, such as the Baiu
front and autumnal rain front, but its performance de-
creased upon the approach of a typhoon.
In comparison with these papers, our study fo-
cuses on an arbitrary area, with an approximate size
of an average country. Thus, the output of our algo-
rithm contains a single result, one of the four classes.
Another important distinction is the type of input our
algorithm uses, the synoptic maps, in comparison to
atmospherical data grids, which is an entirely differ-
ent meteorological map representations. As a final
distinction, our model is able to classify all 3 types
of fronts on a particular area, not only discovering the
existence of a particular one in a certain territory.
3 METHODOLOGY
The research plan chosen for this project requires
a methodology that adopts both theoretical analysis
and practical design, achieved through implementa-
tion and experimentation with different CNN models
and datasets.
3.1 Dataset
The input data of the problem is represented by sets
of ”synoptic map” type images, collected from dif-
ferent weather stations, in which different meteoro-
logical characteristics are represented: air pressure,
temperature and humidity, baric tendency, wind di-
rection and speed. Thus, the model aims to detect the
air fronts over a small chosen territory from the initial
synoptic map. The format of the map is presented in
2. The study uses synoptic map datasets, downloaded
Figure 2: Synoptic Map.
from Wetterzentrale (wet, ), a German weather ser-
vice that provides synoptic maps daily. The data was
manually collected by the authors, obtaining roughly
650 synoptic maps from different years and seasons
between 2013-2022.
3.2 Input Preprocessing
The approach in this paper involves a few steps of
preprocessing of the input data. The initial images
received from the weather stations cover the Europe
continent, containing multiple or even all types of
fronts, making the result of the classification mean-
ingless. To obtain input data that can be classified
under a predominant class, the synoptic maps were
divided into 9 equally sized tiles. This method low-
ers the chance of an image containing multiple fronts,
as it covers a smaller area. The tiles were manually
labelled into one of the 4 categories (no front, cold
front, warm front or mixed front) by the most predom-
inant one, if there were multiple present in the picture.
To generate more data, we augmented the data by ro-
tating the tiles with 90, 180 respectively 270 degrees,
thus generating another 3 front lines with different di-
rections. Using this method, we gathered roughly 160
pictures per class from which 25% were used for val-
idation purposes.
To avoid overfitting to one class, we have used
equally sized datasets from each category for the
training and validation data. In order to increase the
performance of our CNN in real life situations we
have used both simple, easily identifiable fronts and
more complex pictures illustrating multiple types of
fronts, having a predominant one. This makes our
datasets more realistic and relevant.
3.3 Network Architecture
The algorithm used is based on the classical model for
image recognition through supervised learning, mak-
ing use of Convolution Neural Networks with multi-
ple convolution, pooling and dropout layers.
Convolutional Neural Networks (CNNs) are a type
of neural network that is commonly used in image
and video recognition tasks. CNNs are specifically
designed to effectively handle spatial input data, such
as images, by leveraging a series of convolutional lay-
ers (O’Shea and Nash, 2015). A CNN consists of
multiple layers, including convolutional layers, pool-
ing layers, and fully connected layers. The input to
a CNN is a tensor, typically representing an image,
which is passed through a series of convolutional lay-
ers. Each convolutional layer consists of a set of filters
that are convolved with the input tensor to produce a
set of output features.
The filters used in the convolutional layers are
learned during the training process, allowing the net-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
96
work to learn features that are specific to the input
data. These learned features are then used to classify
the input data.
Pooling layers are used to downsample the output
features from the convolutional layers, reducing the
spatial dimensions of the data while preserving the
most important information. This helps to reduce the
number of parameters in the network, making it more
efficient to train.
Finally, the output from the last pooling layer is
passed through a series of fully connected layers,
which perform classification on the features extracted
by the convolutional and pooling layers.
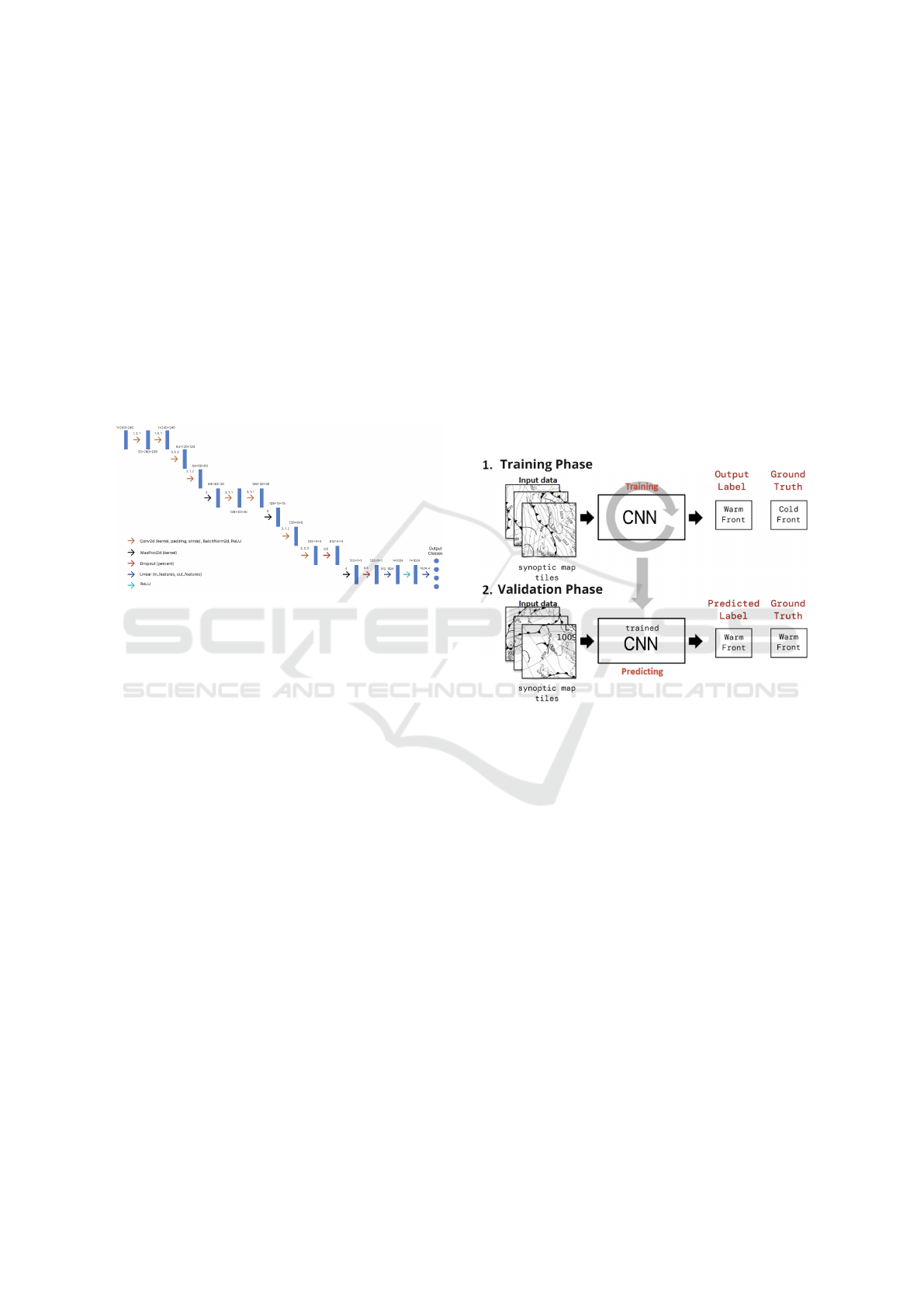
The CNN architecture used in our paper is de-
picted in 3.
Figure 3: CNN model.
Our CNN model starts with images of a minimum
size of 240x240, as they are all adjusted to this reso-
lution before entering the first layer. The model is or-
ganized in multiple 2D convolution layers, taking into
consideration the format of the input image (black and
white) which is represented with only one slice, aver-
age pooling, and dropout layers, which help prevent
overfitting. The last step of the neural network is the
flattening phase, outputting the probability of the in-
put belonging to each of the 4 classes. For the first
layer, the number of input channels is 1 because the
algorithm uses black-and-white images. After the 2D
convolution is applied, the layer performs, in addi-
tion, a batch normalization and a rectified linear unit
function (ReLU). All of the convolutional and pooling
layers form the sequential layer, which is followed by
the flattening phase.
3.4 Training Process
The phases of the Training and Validation process are
presented in Figure 4.
Our experiments start with loading the data, be-
ing split into train and validation data. These two are
shuffled into batches of 32 images, in order to max-
imize the probability of having each type of front in
all batches to acquire knowledge about all fronts after
processing each batch.
The training phase starts with no accuracy, slightly
increasing over the epochs. In each epoch, the algo-
rithm trains the model and iterates over batches of im-
ages loaded from the training dataset. The classes are
predicted using images from the current batch and the
output is compared to the actual labels. The loss func-
tion used is cross entropy and it backpropagates the
loss into the network. This allows the parameters to
be adjusted according to the computed gradients.
After the iteration, the learning rate is adjusted,
decreasing with the current epoch. The train loss and
accuracy are measured using the predictions and the
actual labels for all images from each batch. The val-
idation phase evaluates the model on the correspond-
ing dataset and saves the model if greater accuracy is
obtained.
Figure 4: Conceptual Diagram of Training and Validation
Process.
3.5 Metrics and Performance
Assessment
In order to evaluate our method we are measuring the
number of correctly classified fronts, computing the
overall and by class accuracy. We also compute a con-
fusion matrix to better visualize the performance of
our CNN model. We display this matrix as a heatmap
and we plot the evolution with each epoch of the over-
all and by class accuracy.
A Confusion Matrix for multiple classes is a ma-
trix that summarizes the performance of a machine
learning model by comparing the predicted class la-
bels with the actual class labels. It is a valuable tool
for evaluating the performance of a model and can be
used to calculate various metrics to assess its effec-
tiveness.
In our case, the confusion matrix is a square grid
having the number of rows equal to the number of
Automatic Detection and Classification of Atmospherical Fronts
97

classes. Each row in the confusion matrix represents
the instances in a predicted class, while each column
represents the instances in an actual class. The value
in each cell (i,j) of the matrix represents the percent-
age of instances that were classified as i but actually
belonged to j. Therefore, our aim is to have the largest
percentages on the main diagonal, which represents
the percentage of correctly classified instances.
Accuracy is a measure of how well a predictive
model is able to correctly predict the outcome or class
label of a given input. Formally, accuracy is defined
as the ratio of the number of correctly predicted in-
stances to the total number of instances in the dataset.
In multi-class classification problems, where there are
more than two possible classes, the number of in-
stances that were correctly classified as each class
needs to be counted separately. The accuracy for
multi-class classification is then calculated as:
Accuracy =
correct classi f ications
all classi f ications
(1)
Therefore, in order to monitor the accuracy of our
model after learning in each epoch, we are plotting
the evolution of our accuracy during training.
This paper tests the hypothesis that atmospheric
fronts covering a small area ( less than 350000 sq km)
can be classified by a CNN with an accuracy of over
60%. For each epoch, we measure the training loss
and train and validation accuracy. If the validation
accuracy is better than the best accuracy measured so
far we save the model and upgrade the best one. We
train the model over 100 epochs, saving intermediary
best models.
In comparison with other articles, because the aim
of our experiment was classification and not detection
of the fronts as in (Niebler et al., 2022), we were able
to measure the performance of our algorithm numeri-
cally, as described above, through the number of cor-
rectly classified pictures, making use of all the clas-
sic performance assessment methods used in the ML
field.
4 RESULTS AND DISCUSSIONS
This study involved conducting experiments using
two models with different architectures, which will be
detailed in the following sections. These sections will
compare the training datasets, architectures, and re-
sults obtained from the experiments. It is worth men-
tioning that the second approach demonstrates a no-
table improvement resulting from modifications made
to the model structure and enhancements in the data
quality utilized in our study.
4.1 Initial Version
To better understand the problem and the input data
we started experimenting with a model similar to the
one developed in paper (Niebler et al., 2022), having
a simplified U-Net architecture in order to suit our
smaller images better. We observed that the model
shows lower performance on our data. The architec-
ture can be observed in Figure 5 and the results of
the validation data can be observed in Figure 6. The
dataset used for the first experiment contains ≈ 300
images.
Figure 5: CNN Model Version 1.
By analyzing the results obtained we noticed that
the model can easily detect the presence of a front but
classifying the type of front has a lower performance.
Figure 6: Confusion matrix Version 1.
4.2 Final Version
The first improvement brought to the model focuses
on enhancing the training and validation datasets by
adding more input data and improving its quality, both
by using higher resolution images and filtering out
images that were too hard to classify usually because
more than one front could be identified. The archi-
tecture of the model is also improved, with a new ap-
proach that can be visualized in Figure 3.
The best model we obtained during the training
phase had an accuracy of 78% and was saved after the
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
98
20th epoch. We provide the accuracy overall and the
accuracy per class evolution in Figure 7 and Figure 8.
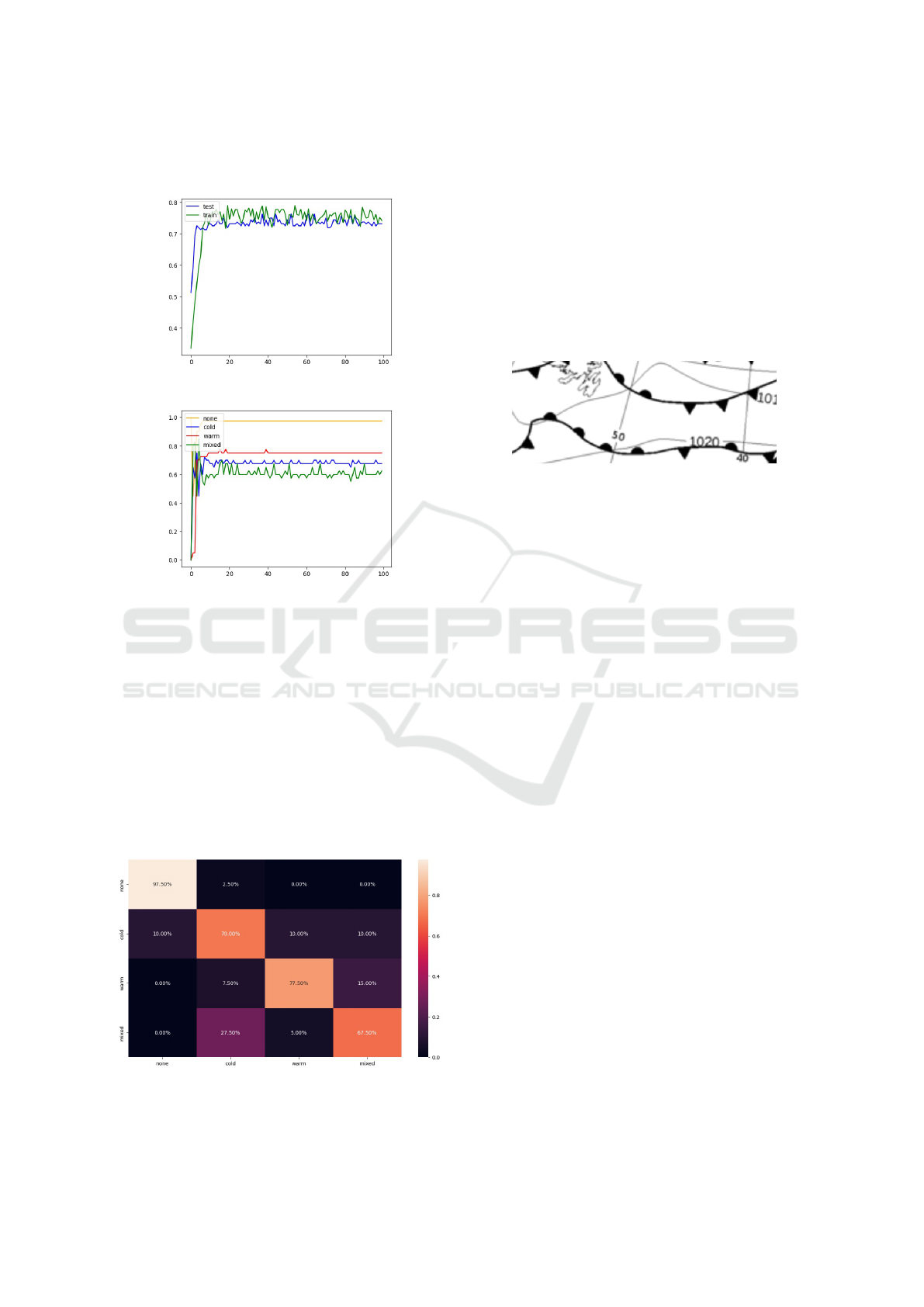
Figure 7: Train and Validation Accuracy.
Figure 8: Accuracy Per Class Evolution.
It is noticeable that in the overall accuracy plot,
our model learns the most in the first 20 epochs of the
training, converging towards an accuracy of 78% in
the following epochs. The oscillation of the accuracy
in the first epochs is present due to the encountering
of a new class in the processed batch of the current
epoch. In the accuracy per class plot, it is evident that
our model demonstrates proficient performance in de-
tecting the presence of a front and a similar accuracy
in detecting cold, warm, and mixed fronts.
A more refined overview of the performance is
provided by the confusion matrix described in Figure
9, obtained by plotting it as a heatmap.
Figure 9: Confusion matrix.
It can be observed that the model’s biggest flaw
is its tendency to misidentify cold fronts as mixed
fronts, with a 27.5% error rate. This issue arises be-
cause of the quality of our data, some of the syn-
optic map tiles contain both warm and cold fronts (
with cold fronts being the predominant ones ) and our
model may mistake a tile with a cold and a warm front
with a mixed one. The difference between the two
cases consists of the fact that the two polylines of the
fronts may overlap and create the illusion of a mixed
front, as can be observed in Figure 10.
Figure 10: Cold and Warm Fronts Alternatively.
5 CONCLUSIONS AND FURTHER
WORK
The main conclusion that can be drawn is that Auto-
matic Front Detection can be a very efficient solution
for the issues we currently face in weather prediction.
Our study demonstrates that a supervised learning
model, even with a relatively small training dataset,
can accurately classify the types of fronts present on
a small area from a synoptic map. One of the most
important strengths of our approach is that our exper-
iment paves the path for further research and for the
discovery of new approaches in the domain, which is
currently very little represented in the research world.
Considering that, to our knowledge, this research is
one of the first to approach front classification on
small areas, we have encountered a few shortcomings
in our experiments. One of the most relevant weak-
nesses to our approach is the training dataset, which
is very hard to obtain and label because they are not
publicly available in larger sets. In addition to this, the
synoptic maps might not be consistent in the future,
depending on how meteorologists decide to represent
the fronts.
There is definitely room for improvement in the
model developed, as it is one of the first to approach
this issue. Two possible directions that could increase
the performance are larger, more qualitative training
datasets and more efficient processors that could sup-
port more epochs of training.
Automatic Detection and Classification of Atmospherical Fronts
99

ACKNOWLEDGEMENTS
The realization of this work was made possible with
the support of our dedicated professors, to whom we
would like to express our gratitude: Professor, Ph.D.
Laura Silvia Dios
,
an (Babes
,
-Bolyai University, Com-
puter Science Department) and to Assoc. Professor,
Ph.D. Adina Eliza Croitoru (Babes
,
-Bolyai University,
Faculty of Geography).
REFERENCES
https://www.wetterzentrale.de. Online; accessed 15 June,
2023.
Bergeron, T. (1980). Synoptic meteorology: an historical
review. Pure and Applied geophysics, 119(3):443–
473.
Matsuoka, D., Sugimoto, S., Nakagawa, Y., Kawahara, S.,
Araki, F., Onoue, Y., Iiyama, M., and Koyamada,
K. (2019). Automatic detection of stationary fronts
around japan using a deep convolutional neural net-
work. SOLA, 15:154–159.
Niebler, S., Miltenberger, A., Schmidt, B., and Spichtinger,
P. (2022). Automated detection and classification
of synoptic-scale fronts from atmospheric data grids.
Weather and Climate Dynamics, 3(1):113–137.
O’Shea, K. and Nash, R. (2015). An introduction
to convolutional neural networks. arXiv preprint
arXiv:1511.08458.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
100
