
Informative Rays Selection for Few-Shot Neural Radiance Fields
Marco Orsingher
1,3
, Anthony Dell’Eva
2,3
, Paolo Zani
3
, Paolo Medici
3
and Massimo Bertozzi
1
1
University of Parma, Italy
2
University of Bologna, Italy
3
VisLab, an Ambarella Inc. company, Italy
Keywords:
Neural Radiance Fields, Novel View Synthesis, Few-Shot Learning, 3D Reconstruction.
Abstract:
Neural Radiance Fields (NeRF) have recently emerged as a powerful method for image-based 3D reconstruc-
tion, but the lengthy per-scene optimization limits their practical usage, especially in resource-constrained
settings. Existing approaches solve this issue by reducing the number of input views and regularizing the
learned volumetric representation with either complex losses or additional inputs from other modalities. In
this paper, we present KeyNeRF, a simple yet effective method for training NeRF in few-shot scenarios by
focusing on key informative rays. Such rays are first selected at camera level by a view selection algorithm
that promotes baseline diversity while guaranteeing scene coverage, then at pixel level by sampling from a
probability distribution based on local image entropy. Our approach performs favorably against state-of-the-
art methods, while requiring minimal changes to existing NeRF codebases.
1 INTRODUCTION
3D reconstruction and novel view synthesis from a
set of calibrated images is a longstanding challenge
in computer vision, with applications in robotics
(Van der Merwe et al., 2020; Wang et al., 2019), vir-
tual reality (Cao et al., 2021; Yeh and Lin, 2018) and
autonomous driving (Orsingher et al., 2022a; Ors-
ingher et al., 2022b). Recently, Neural Radiance
Fields (NeRF) (Mildenhall et al., 2020) have been
introduced to model 3D scenes with a small neu-
ral network that can be queried with any point in
space to produce the corresponding density and view-
dependent color. In order to enable end-to-end train-
ing from images, differentiable rendering is used to
integrate a set of points along each camera ray.
The simple formulation of NeRF and its unprece-
dented rendering quality are arguably the main rea-
sons of its popularity. However, it also suffers from
long training times, since each pixel of each input
view must be seen multiple times until convergence.
To tackle this issue, a possible solution is to reduce
the number of input views and learn a 3D scene repre-
sentation from few sparse cameras. Existing few-shot
methods focus on regularizing the volumetric density
learned by NeRF with new loss functions (Kim et al.,
2022; Yang et al., 2023) and additional inputs (Jain
et al., 2021; Deng et al., 2022; Roessle et al., 2022;
Wynn and Turmukhambetov, 2023; Niemeyer et al.,
2022), thus introducing complexity in the pipeline.
Furthermore, they all assume to be given a ran-
dom set of viewpoints, without control on how such
cameras are selected. However, in common use cases,
such as object scanning from videos acquired by a
user with handheld devices, the input data consist in
a dense and redundant set of frames with a known ac-
quisition trajectory. Our insight is to better exploit
such information in the input views. To this end, we
propose a method, called KeyNeRF, to identify key
informative samples to focus on during training.
Firstly, we select the best input views by find-
ing a minimal set of cameras that ensure scene cov-
erage. Secondly, this initial set is augmented with
a greedy algorithm that promotes baseline diversity.
Finally, we choose the most informative pixels for
each view, in terms of their local entropy in the im-
age. Our rays selection procedure is extremely flexi-
ble, as it operates directly at input level, and it can be
implemented by only changing two lines of any ex-
isting NeRF codebase. The proposed approach out-
performs state-of-the-art methods on standard bench-
marks in the considered scenario, while not requir-
ing additional inputs and complex loss functions. Our
contribution to existing literature is threefold:
1. We present a view selection algorithm that starts
from the minimal set of cameras covering the
Orsingher, M., Dell’Eva, A., Zani, P., Medici, P. and Ber tozzi, M.
Informative Rays Selection for Few-Shot Neural Radiance Fields.
DOI: 10.5220/0012303600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
253-261
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
253

scene and iteratively adds the next best view in
a greedy way.
2. We propose to sample pixels in a given camera
plane by following a probability distribution in-
duced by the local entropy of the image.
3. To the best of our knowledge, our framework is
the first few-shot NeRF approach that operates at
input level, without requiring additional data or
regularization losses.
2 RELATED WORK
Few-Shot NeRF. The original formulation of NeRF
(Mildenhall et al., 2020) requires a large set of cam-
eras to converge, thus leading to long training times.
For this reason, several methods (Niemeyer et al.,
2022; Kim et al., 2022; Seo et al., 2023; Wynn and
Turmukhambetov, 2023; Jain et al., 2021; Deng et al.,
2022) have been proposed to allow learning radiance
fields from few sparse views. All these approaches
introduce new loss functions to regularize the under-
lying representation. However, such losses might be
difficult to balance and they are in contrast with one
of the main advantages of NeRF, which can be trained
in a self-supervised way from images with a simple
MSE loss. Moreover, most of them further assume to
have additional inputs, such as depth measurements
(Deng et al., 2022; Roessle et al., 2022) or other pre-
trained networks (Jain et al., 2021; Niemeyer et al.,
2022; Wynn and Turmukhambetov, 2023). Specifi-
cally, DS-NeRF (Deng et al., 2022) and DDP-NeRF
(Roessle et al., 2022) require sparse depth to guide
sampling along each ray and optimize rendered depth.
DietNeRF (Jain et al., 2021) enforces high-level se-
mantic consistency between novel view renderings
with pre-trained CLIP embeddings, while RegNeRF
(Niemeyer et al., 2022) and DiffusioNeRF (Wynn and
Turmukhambetov, 2023) maximize the likelihood of a
rendered patch according to a given normalizing flow
or diffusion model, respectively.
View Selection. Another shortcoming of existing
few-shot NeRF methods is that the input dataset is
sampled at random, both in terms of cameras and
pixels. While this is a general assumption, it is also
suboptimal in typical use cases, such as object scan-
ning from videos, since random sampling discards
geometric information about the scanning trajectory.
To this end, we propose a view selection algorithm
that guarantees scene coverage in an optimal way and
promotes baseline diversity with a greedy procedure.
View selection for 3D reconstruction has been studied
in literature mainly in the context of large-scale sce-
narios, such as city-scale (Orsingher et al., 2022a) or
building-scale (Mauro et al., 2014; Furukawa et al.,
2010; Ladikos et al., 2009) reconstruction. The usual
approach is to build a visibility matrix between all
the possible pairs of cameras, and to employ either
graph theory (Furukawa et al., 2010; Ladikos et al.,
2009) or integer linear programming (Mauro et al.,
2014; Orsingher et al., 2022a) to find a relevant subset
of the available views. Besides targeting a different
use case, such methods have several drawbacks in the
considered setting. Firstly, the visibility matrix for-
mulation assumes to have a set of sparse keypoints as
input, while our approach works only with calibrated
cameras. Secondly, it requires the desired number of
cameras to be specified a priori, whereas KeyNeRF
schedules all the views at once. Furthermore, we im-
prove upon existing methods by explicitly and itera-
tively enforcing baseline diversity.
Rays Sampling. The aforementioned few-shot ap-
proaches treat all pixels equally for a given input
image and sample a random batch at each iteration.
Other methods (Sucar et al., 2021; Pan et al., 2022) pi-
oneered the use of uncertainty-based sampling of rays
and estimate such uncertainty online, which leads to a
computational overhead. On the other hand, we pro-
pose to compute the local entropy of the image offline
and to draw pixels from such distribution, which rep-
resents by definition the most informative rays.
3 METHOD
We present a framework, based on NeRF (Section
3.1), for novel view synthesis and 3D reconstruction
from a given set of N calibrated cameras. We assume
to have a dense and redundant set of views, such as the
frames of a video acquired by a user for object scan-
ning. Our method, named KeyNeRF, identifies the key
information in the given set of views by greedily se-
lecting a subset of cameras (Section 3.2) and choosing
the most informative pixels within such cameras (Sec-
tion 3.3) with entropy-based sampling. The proposed
approach improves the efficiency of NeRF, while re-
quiring minimal code changes to its implementation.
Assuming NumPy imported as np, both cameras and
rays are drawn uniformly in NeRF:
pose_idx = np.random.choice(num_poses)
rays_idxs = np.random.choice(
num_rays, size = B, p = None
)
In KeyNeRF, we simply reduce the set of input views
and change the probability distribution for sampling
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
254

pixels. Differences in the code are highlighted with
bold characters:
pose_idx = np.random.choice(select_cams)
rays_idxs = np.random.choice(
num_rays, size = B, p = entropy
)
Our rays selection procedure is extremely flexible, as
it operates directly at input level and it can be seam-
lessly integrated with other any NeRF approach, since
it is orthogonal to improvements in loss functions or
field representations (Liu et al., 2020; Chen et al.,
2022; M
¨
uller et al., 2022).
3.1 Preliminaries
A Neural Radiance Field (NeRF) (Mildenhall et al.,
2020) is a continuous and implicit representation of a
3D scene. A small MLP F
θ
maps any point x ∈ R
3
in space and a viewing direction d ∈ S
2
to its cor-
responding density σ(x) ∈ R
+
and view-dependent
color c(x,d) ∈ R
3
. This network is trained by mini-
mizing a reconstruction loss between the ground truth
colors in the input images and the rendered colors
from the radiance field. For each camera ray r(t) =
o+td with origin o and oriented as d, the correspond-
ing color
ˆ
I(r) is computed as:
ˆ
I(r) =
Z
t
f
t
n
exp
−
Z
t
t
n
σ(s)ds
·σ(t) ·c(t)dt (1)
where [t
n
,t
f
] is the integration boundary. In practice,
both integrals are approximated by numerical quadra-
ture with a discrete set of samples along each ray.
More details can be found in (Mildenhall et al., 2020).
Given the ground truth color I(r) for the ray r, NeRF
optimizes a batch of B rays at each iteration. Given
N cameras with M pixels each, an epoch needs
NM
B
iterations and training requires multiple epochs. Our
insight is to focus on the most informative cameras
and pixels, thus significantly reducing N and M.
3.2 View Selection
The goal of a view selection procedure is to sam-
ple K views from a dense set of N available cam-
eras (K ≪N) for efficient 3D reconstruction, while (i)
maintaining the visibility of the whole scene and (ii)
ensuring diversity within the selected subset. Inspired
by (Orsingher et al., 2022a), we propose to satisfy the
first constraint by solving a simple optimization prob-
lem to find the minimal set of cameras that guarantee
scene coverage. Then, a greedy algorithm iteratively
adds the camera with the most diverse baseline, until
all the views have been scheduled.
3.2.1 Scene Coverage
In the first phase, cameras are represented by binary
variables x
i
∈ {0,1} as in (Orsingher et al., 2022a),
and the scene is approximated with a uniform 3D grid
of M points within bounds (p
min
,p
max
). Differently
from (Orsingher et al., 2022a), we do not assume to
have sparse keypoints as input, but they can be added
to the scene, if available. Let A
j
∈ R
N
be a visibility
vector with elements a
i j
= 1 if point j is visible in
camera i, 0 otherwise. The following integer linear
programming (ILP) problem is then formulated:
min
N
∑
i=1
x
i
s.t. A
⊤
j
x > 0 ∀j = 1,.. .,M
(2)
The set of cameras selected in this way ensures scene
visibility, but some regions of interest might not be
fully covered with sufficient baseline for 3D recon-
struction (see Figure 1, left).
3.2.2 Baseline Diversity
In order to promote baseline diversity, we design a
greedy view selection algorithm to choose the next
best camera among the available ones with respect to
the currently selected set. We generate a N ×N sym-
metric baseline matrix B, where b
i j
= b
ji
is the angle
between the optical axes of cameras i and j:
b
i j
= arccos
z
⊤
i
z
j
|z
i
|·|z
j
|
(3)
Then, at each iteration step, until the desired number
of cameras has been reached, we add to the selected
subset the camera with the highest relative angle with
respect to all currently selected cameras, as shown in
Figure 1. Practically, for each remaining view, we
query from B its smallest score against the selected
views and add to the subset the camera with the high-
est smallest score. Assuming NumPy imported as np,
let select cams be the output of the first stage:
while remaining_cams:
sub_mat = B[remain_cams][:, select_cams]
idx = np.argmax(np.min(sub_mat, axis = 1))
select_cams.append(remain_cams[idx])
remain_cams.remove(remain_cams[idx])
This formulation is different from (Orsingher et al.,
2022a), where matchability is a hard constraint.
Moreover, the iterative nature of the greedy proce-
dure induces an implicit ranking on the set of cam-
eras and allows the user to choose flexibly the de-
sired K. This is a significant improvement with re-
spect to (Orsingher et al., 2022a), where baseline di-
versity is not explicitly enforced, and a different op-
timization problem must be solved from scratch for
Informative Rays Selection for Few-Shot Neural Radiance Fields
255

Figure 1: Illustration of the view selection procedure. The new camera (red, right) has the most diverse baseline with respect
to the set of current cameras (blue, left). A proxy geometry of the scene is shown for reference.
Figure 2: Probability distribution over pixels (right) for an example input image (left), induced by the local entropy of the
image when sampling a batch of rays for training NeRF.
different values of K. We will show in the experi-
ments that any K ≥ K
min
leads to good results, where
K
min
is the cardinality of the minimal scene coverage
set. Intuitively, more views progressively improve the
performances, with diminishing returns towards the
end, when cameras have large overlaps with the cur-
rent set and do not add relevant information.
3.3 Rays Sampling
At each training iteration, NeRF (Mildenhall et al.,
2020) samples a pose in the dataset and a batch of
B pixels from such camera. Typically, rays are sam-
pled uniformly from the whole set of available pix-
els. However, we observe that not all rays are equally
informative about the scene. For example, the back-
ground or large textureless regions in the image could
be covered with fewer samples, exploiting the implicit
smoothing bias of MLPs (Ramasinghe et al., 2022).
We propose to define a probability distribution over
pixels and to focus on high-frequency details during
training, in order to converge faster, especially in few-
shot scenarios. The amount of information of a pixel
p can be quantified by its local entropy:
e(p) = −
∑
(u,v)∈W
h
uv
logh
uv
(4)
where W defines a local window around p and h is the
normalized histogram count. In order to allow ran-
dom sampling, we normalize it to a probability distri-
bution, which is the input to np.random.choice().
An example is shown in Figure 2.
4 EXPERIMENTS
4.1 Implementation Details
Dataset. We perform our experiments on two com-
mon benchmarks. The Realistic Synthetic 360
◦
dataset (Mildenhall et al., 2020) contains 8 scenes
of different objects with diverse materials and com-
plex illumination, rendered by Blender from 400 ran-
dom viewpoints. Moreover, we randomly select a
subset of 8 scenes from the CO3D dataset (Reizen-
stein et al., 2021), which gathers a wide collection of
object-centric videos from handheld devices. Due to
the unavailability of pre-trained checkpoints of base-
line methods on such data, a complete evaluation on
this dataset would require a huge amount of compu-
tation, well beyond what we can access. To mitigate
this issue, we randomly select a subset of 8 diverse
scenes, both in terms of object category and individ-
ual sequence within each category. The rationale be-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
256
Table 1: Quantitative results on the Blender dataset. Best and second results are bold and underlined, respectively.
Method PSNR ↑ LPIPS ↓ SSIM ↑ Avg. ↓
NeRF (Mildenhall et al., 2020) 24.424 0.132 0.878 0.055
DietNeRF (Jain et al., 2021) 24.370 0.127 0.878 0.054
InfoNeRF (Kim et al., 2022) 24.950 0.117 0.884 0.050
KeyNeRF (w/o entropy) 25.568 0.109 0.895 0.046
KeyNeRF (ours) 25.653 0.106 0.898 0.045
Table 2: Quantitative results on the CO3D dataset. Best and second results are bold and underlined, respectively.
Method PSNR ↑ LPIPS ↓ SSIM ↑ Avg. ↓
NeRF (Mildenhall et al., 2020) 20.708 0.491 0.744 0.128
DietNeRF (Jain et al., 2021) 19.994 0.511 0.728 0.138
InfoNeRF (Kim et al., 2022) 20.143 0.576 0.714 0.143
KeyNeRF (w/o entropy) 21.853 0.470 0.759 0.114
KeyNeRF (ours) 22.183 0.463 0.762 0.109
hind this choice is to establish a real-world equivalent
of the synthetic dataset, with different objects, vari-
ous aspect ratios and noisy camera poses from SfM
(Sch
¨
onberger and Frahm, 2016).
Parameters. For a given batch size B, at each it-
eration, we sample B/2 rays from the entropy-based
distribution and B/2 rays at random to ensure full cov-
erage. All the methods are trained for N
iter
= 50000
iterations with K = 16 poses. Note that this is a dif-
ferent setup than the typical few-shot scenario, where
K ≤ 8 and training is much longer (N
iter
≥ 200000).
We argue that this setup is overlooked in the litera-
ture, despite having significant practical relevance. In
the common case of object scanning from videos, it
is reasonable to assume to have more than 8 frames
and the actual goal is training efficiency. However,
existing few-shot methods tend to saturate their con-
tributions when K > 8 (Kim et al., 2022), as shown
in Table 1 and Table 2, while our method shows im-
proved results over a wide range of values of K (see
Figure 3a). The influence of both the number of poses
K and iterations N
iter
is ablated in Section 4.3.
Code. The training code is based on a reference
PyTorch version of NeRF (Yen-Chen, 2020). For
the rays selection procedure, we solve the ILP with
the OR-Tools library (Perron and Furnon, 2022) and
compute the image entropy with the default imple-
mentation in scikit-image.
4.2 Quantitative Results
Following standard practice (Mildenhall et al., 2020),
we evaluate the proposed approach in terms of the
image quality of novel rendered views. Such qual-
ity can be measured by three common metrics: PSNR
for pixelwise differences with ground truth images,
SSIM for the perceived change in structural informa-
tion, and LPIPS for the similarity between the acti-
vations in a pre-trained network. Moreover, we re-
port the geometric mean of LPIPS,
√
1 −SSIM and
10
−PSNR/10
to combine them in a single metric for
easier comparison (reported as Avg. in Table 1 and
Table 2). We compare our KeyNeRF in two dif-
ferent versions (i.e. with and without entropy-based
rays sampling) against the original NeRF (Mildenhall
et al., 2020) and two state-of-the-art few-shot meth-
ods (Jain et al., 2021; Kim et al., 2022). Table 1 and
Table 2 show that both versions of KeyNeRF outper-
form existing approaches on synthetic and real-world
data, respectively, while being much simpler to im-
plement and more flexible to integrate with any NeRF
backbone. Moreover, note that the concurrent few-
shot approaches fall behind the vanilla NeRF on real-
world data (see Table 2), thus highlighting the com-
plexity of loss weighting in such methods beyond
controlled scenarios. On the other hand, KeyNeRF
consistently outperforms them.
4.3 Ablation Studies
In this section, we analyze the impact of the num-
ber of poses K and the number of training iterations
N
iter
on the image quality metrics, as well as the sep-
arate role of selecting views and selecting informa-
Informative Rays Selection for Few-Shot Neural Radiance Fields
257

(a) Ablation on the choice of K. (b) Ablation on the choice of N
iter
.
Figure 3: Quantitative comparison between our KeyNeRF and the original NeRF (Mildenhall et al., 2020) as a function of the
number of poses (left) and iterations (right). Lower is better.
tive rays. We perform such ablations on the Blender
dataset (Mildenhall et al., 2020).
Figure 3a shows that the proposed view selec-
tion method has more influence for low values of K
and progressively decreases, as expected. In order to
clearly visualize this difference, we provide a qualita-
tive comparison for K = 8 in Figure 4 and as a func-
tion of the number of poses K in Figure 5. It can be
seen that our approach converges faster and with bet-
ter stability. Since the coverage constraint is satisfied
optimally by the view selection algorithm, KeyNeRF
allows to reconstruct an approximate scene even when
K = 8. Crucially, our improvement is still significant
up to K = 48, whereas concurrent few-shot methods
only target the lowest end of this spectrum (K ≤8).
Since we mainly focus on training efficiency, Fig-
ure 3b visualizes the convergence speed in steps
of 5000 iterations each. Both versions of KeyN-
eRF show significant improvements across the whole
training runs. Moreover, note how entropy-based
sampling of rays is more effective in early iterations
and then saturates after around 30000 steps. This con-
firms that selecting the most informative rays is im-
portant, especially with a limited training budget. The
quantitative results in Table 1 and Table 2 underesti-
mate the effect of this component. The lower quan-
titative impact is due to the fact that entropy-based
sampling is most effective in fine-grained details and
intricate structures, which are not well captured by
numerical metrics. This is shown in Figure 6: sam-
pling pixels uniformly discards crucial information,
which leads to oversampling textureless areas and un-
dersampling image regions with a lot of details.
4.4 Qualitative Results
The performance improvement of the proposed
KeyNeRF in terms of rendering quality is visualized
in Figure 7 for the Blender dataset and in Figure 8
for the CO3D dataset. The qualitative comparison
against state-of-the-art methods shows that our infor-
mative rays selection strategy allows to render novel
views with better details, especially in intricate struc-
tures such as the bulldozer wheels or the ship mast
in Figure 7, and less hallucinated geometries (e.g. the
teddybear and the hydrant in Figure 8). Moreover, our
outputs are less blurry and preserve better the original
colors of the scene. Finally, these results confirm that
both DietNeRF (Jain et al., 2021) and InfoNeRF (Kim
et al., 2022) tend to saturate their improvements over
the original NeRF (Mildenhall et al., 2020) in the con-
sidered setup, while our approach presents significant
advantages.
5 CONCLUSION
In this work, we present KeyNeRF, a method to select
informative samples for training a few-shot NeRF.
Given a dense and redundant set of views, we first
select a subset of cameras to ensure both scene cov-
erage and baseline diversity. Then, individual rays
for each view are sampled from a probability distri-
bution based on the local entropy of the image. This
two-stage process allows the optimization to focus on
relevant information in early iterations, thus speed-
ing up convergence with a limited training budget. In
this way, KeyNeRF outperforms other few-shot meth-
ods on both synthetic and real-world data, without re-
quiring additional inputs or auxiliary pre-trained net-
works. Moreover, our approach can be easily inte-
grated into any NeRF codebase, as it only requires to
change the lines of code for sampling the batch of rays
to optimize at each iteration. The current formulation
is limited by the object-centric acquisition trajectory
and the assumption of the object having higher en-
tropy than the background. As future work, we plan
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
258
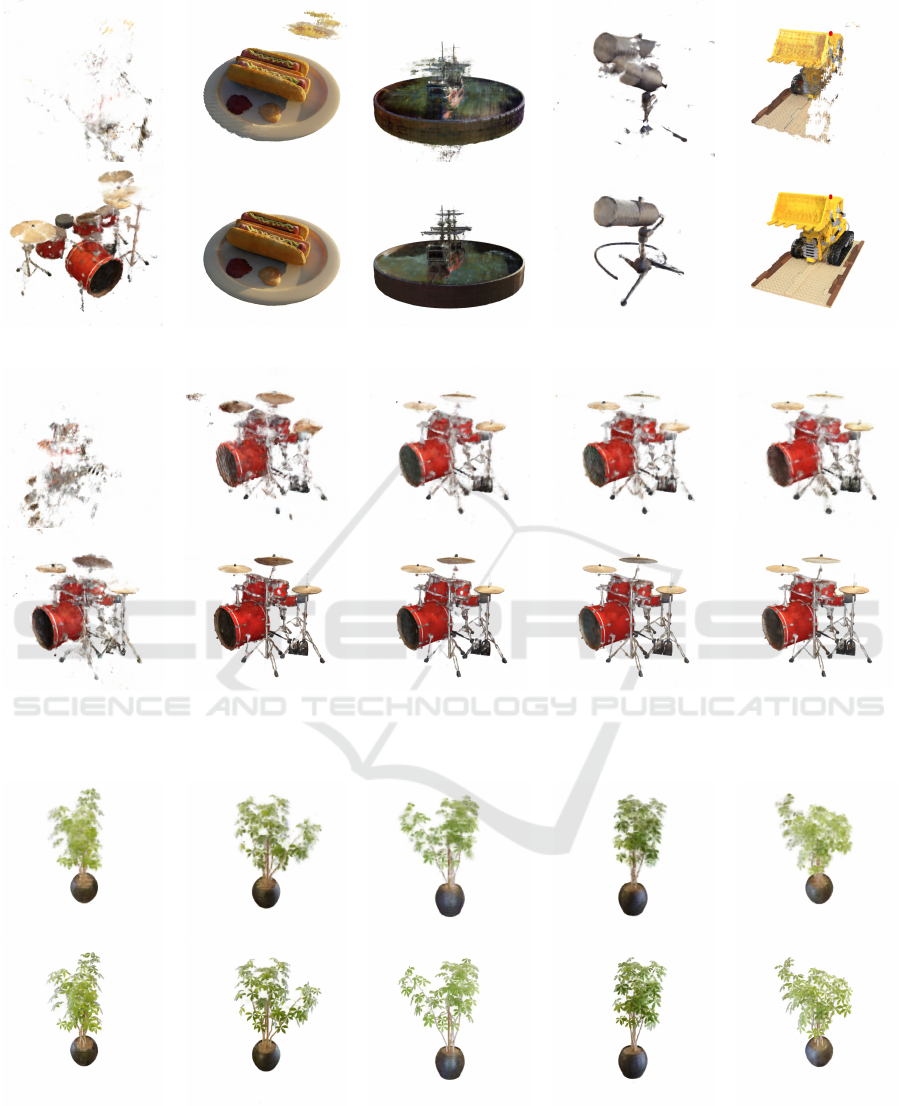
Figure 4: Qualitative comparison between choosing poses at random (top row) and using the proposed algorithm (bottom
row) in a very few-shot setting (K = 8).
(a) K = 8. (b) K = 16. (c) K = 24. (d) K = 32. (e) K = 48.
Figure 5: Qualitative comparison between choosing poses at random (top row) and using the proposed algorithm (bottom
row), as a function of the number of poses K. Zoom in for a better view.
Figure 6: Qualitative comparison between sampling rays at random (top row) and using entropy-based sampling (bottom row)
for different frames of the same scene. Zoom in for a better view.
Informative Rays Selection for Few-Shot Neural Radiance Fields
259

(a) NeRF. (b) DietNeRF. (c) InfoNeRF. (d) Ours. (e) Ground Truth.
Figure 7: Qualitative results on the Blender dataset. Zoom in for a better view.
(a) NeRF. (b) DietNeRF. (c) InfoNeRF. (d) Ours. (e) Ground Truth.
Figure 8: Qualitative results on the CO3D dataset. Zoom in for a better view.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
260

to tackle this issues and to integrate our selection pro-
cedure with other neural reconstruction methods.
REFERENCES
Cao, M., Zheng, L., Jia, W., Lu, H., and Liu, X. (2021). Ac-
curate 3-d reconstruction under iot environments and
its applications to augmented reality. IEEE Transac-
tions on Industrial Informatics, 17(3):2090–2100.
Chen, A., Xu, Z., Geiger, A., Yu, J., and Su, H. (2022).
Tensorf: Tensorial radiance fields. In European Con-
ference on Computer Vision (ECCV).
Deng, K., Liu, A., Zhu, J.-Y., and Ramanan, D. (2022).
Depth-supervised NeRF: Fewer views and faster train-
ing for free. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Furukawa, Y., Curless, B., Seitz, S. M., and Szeliski, R.
(2010). Towards internet-scale multi-view stereo.
In 2010 IEEE computer society conference on com-
puter vision and pattern recognition, pages 1434–
1441. IEEE.
Jain, A., Tancik, M., and Abbeel, P. (2021). Putting nerf
on a diet: Semantically consistent few-shot view syn-
thesis. In Proceedings of the IEEE/CVF International
Conference on Computer Vision (ICCV), pages 5885–
5894.
Kim, M., Seo, S., and Han, B. (2022). Infonerf: Ray en-
tropy minimization for few-shot neural volume ren-
dering. In CVPR.
Ladikos, A., Ilic, S., and Navab, N. (2009). Spectral cam-
era clustering. In 2009 IEEE 12th International Con-
ference on Computer Vision Workshops, ICCV Work-
shops, pages 2080–2086. IEEE.
Liu, L., Gu, J., Lin, K. Z., Chua, T.-S., and Theobalt, C.
(2020). Neural sparse voxel fields. NeurIPS.
Mauro, M., Riemenschneider, H., Signoroni, A., Leonardi,
R., and Van Gool, L. (2014). An integer linear pro-
gramming model for view selection on overlapping
camera clusters. In 2014 2nd International Confer-
ence on 3D Vision, volume 1, pages 464–471. IEEE.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2020). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis. In European conference on computer vision,
pages 405–421. Springer.
M
¨
uller, T., Evans, A., Schied, C., and Keller, A. (2022).
Instant neural graphics primitives with a multiresolu-
tion hash encoding. ACM Transactions on Graphics
(ToG), 41(4):1–15.
Niemeyer, M., Barron, J. T., Mildenhall, B., Sajjadi, M.
S. M., Geiger, A., and Radwan, N. (2022). Regnerf:
Regularizing neural radiance fields for view synthesis
from sparse inputs. In Proc. IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR).
Orsingher, M., Zani, P., Medici, P., and Bertozzi, M.
(2022a). Efficient view clustering and selection for
city-scale 3d reconstruction. In Image Analysis and
Processing–ICIAP 2022: 21st International Confer-
ence, Lecce, Italy, May 23–27, 2022, Proceedings,
Part II, pages 114–124. Springer.
Orsingher, M., Zani, P., Medici, P., and Bertozzi, M.
(2022b). Revisiting patchmatch multi-view stereo for
urban 3d reconstruction. In 2022 IEEE Intelligent Ve-
hicles Symposium (IV), pages 190–196. IEEE.
Pan, X., Lai, Z., Song, S., and Huang, G. (2022). Activen-
erf: Learning where to see with uncertainty estima-
tion. In Computer Vision–ECCV 2022: 17th European
Conference, Tel Aviv, Israel, October 23–27, 2022,
Proceedings, Part XXXIII, pages 230–246. Springer.
Perron, L. and Furnon, V. (2022). Or-tools.
Ramasinghe, S., MacDonald, L. E., and Lucey, S. (2022).
On the frequency-bias of coordinate-mlps. In Ad-
vances in Neural Information Processing Systems.
Reizenstein, J., Shapovalov, R., Henzler, P., Sbordone, L.,
Labatut, P., and Novotny, D. (2021). Common objects
in 3d: Large-scale learning and evaluation of real-life
3d category reconstruction. In International Confer-
ence on Computer Vision.
Roessle, B., Barron, J. T., Mildenhall, B., Srinivasan, P. P.,
and Nießner, M. (2022). Dense depth priors for neural
radiance fields from sparse input views. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR).
Sch
¨
onberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In Conference on Computer
Vision and Pattern Recognition (CVPR).
Seo, S., Han, D., Chang, Y., and Kwak, N. (2023). Mixnerf:
Modeling a ray with mixture density for novel view
synthesis from sparse inputs. In ArXiV.
Sucar, E., Liu, S., Ortiz, J., and Davison, A. (2021). iMAP:
Implicit mapping and positioning in real-time. In Pro-
ceedings of the International Conference on Computer
Vision (ICCV).
Van der Merwe, M., Lu, Q., Sundaralingam, B., Matak,
M., and Hermans, T. (2020). Learning continuous 3d
reconstructions for geometrically aware grasping. In
2020 IEEE International Conference on Robotics and
Automation (ICRA), pages 11516–11522.
Wang, Y., James, S., Stathopoulou, E. K., Beltr
´
an-
Gonz
´
alez, C., Konishi, Y., and Del Bue, A. (2019).
Autonomous 3-d reconstruction, mapping, and ex-
ploration of indoor environments with a robotic arm.
IEEE Robotics and Automation Letters, 4(4):3340–
3347.
Wynn, J. and Turmukhambetov, D. (2023). Diffusionerf:
Regularizing neural radiance fields with denoising dif-
fusion models. In ArXiV.
Yang, J., Pavone, M., and Wang, Y. (2023). Freenerf: Im-
proving few-shot neural rendering with free frequency
regularization. In Proc. IEEE Conf. on Computer Vi-
sion and Pattern Recognition (CVPR).
Yeh, Y.-J. and Lin, H.-Y. (2018). 3d reconstruction and vi-
sual slam of indoor scenes for augmented reality ap-
plication. In 2018 IEEE 14th International Confer-
ence on Control and Automation (ICCA), pages 94–
99.
Yen-Chen, L. (2020). Nerf-pytorch. https://github.com/
yenchenlin/nerf-pytorch/.
Informative Rays Selection for Few-Shot Neural Radiance Fields
261
