Anisotropic Diffusion for Depth Estimation in Shape from Focus Systems
Bilal Ahmad
a
, Ivar Farup
b
and P
˚
al Anders Floor
c
Department of Computer Science, Norwegian University of Science & Technology, 2815 Gjøvik, Norway
{bilal.ahmad, ivar.farup, paal.anders.floor}@ntnu.no
Keywords:
Anisotropic Diffusion, Shape from Focus, 3D Reconstruction.
Abstract:
Shape from focus is a monocular method that uses the camera’s focus as the primary indicator for depth esti-
mation. The initial depth map is usually improved by penalizing the L2 regularizer as a smoothness constraint,
which tends to smoothen the structural details due to linear diffusion. In this article, we propose an energy
minimization-based framework to improve the initial depth map by utilizing a nonlinear, spatial technique,
called anisotropic diffusion as a smoothness constraint, which is combined with a fidelity term that incorpo-
rates the focus values of the initial depth to enhance structural aspects of the observed scene. Experiments
are conducted on synthetic and real datasets which demonstrate that the proposed method can significantly
improve the depth maps.
1 INTRODUCTION
3D reconstruction is a challenging problem within the
domain of computer vision. It can be effectively ad-
dressed by employing different techniques or algo-
rithms to obtain spatial information about an object
or a scene. Vision-based depth estimation methods
are generally categorized into different approaches.
Some methods rely on monocular image analysis
techniques such as texture gradient analysis (Verbin
and Zickler, 2020), and photometric methods (Ahmad
et al., 2022). Furthermore, some methods leverage
multiple images, relying on camera motion or various
relative positions (
¨
Ozyes¸il et al., 2017), while others
involve using image focus as a cue to determine the
depth of the scene (Ali and Mahmood, 2021). The
widespread application of 3D reconstruction can be
found in various fields, including measurement sys-
tems, robotics, medical diagnostics, video surveil-
lance, and monitoring, among others (He et al., 2022),
(Ahmad et al., 2023b).
Shape from focus (SFF) is one of the passive
monocular techniques that recovers the depth or 3D
shape of an object through the analysis of an image
sequence captured by manipulating the focus settings
of the camera. In SFF, the key step involves iden-
tifying the sharpest and best-focused pixels from an
image sequence using a specialized operator known
a
https://orcid.org/0000-0001-8811-0404
b
https://orcid.org/0000-0003-3473-1138
c
https://orcid.org/0000-0001-6328-7414
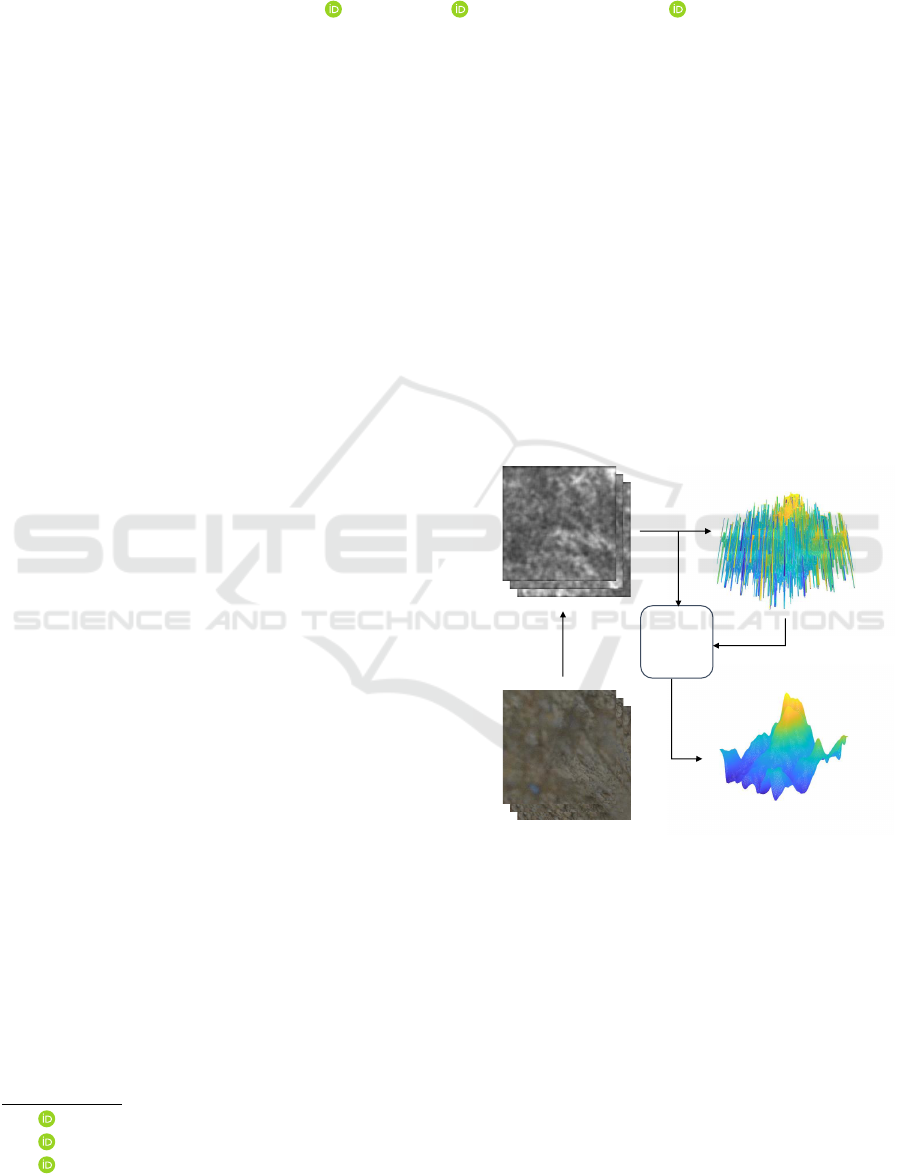
Image Sequence 𝐼
𝑘
(𝑖, 𝑗)
Focus Volume 𝐹
𝑘
(𝑖, 𝑗)
Initial Depth 𝑧
𝑜
Final Depth 𝑧
Anisotropic
Diffusion
𝐹(𝑧
𝑜
)
Figure 1: Proposed SFF system.
as the Focus Measure (FM) operator. These selected
focused pixels serve as a main cue for estimating the
depth information of the objects.
The SFF method was introduced by Nayar et al.
(Nayar and Nakagawa, 1994), who computed the fo-
cus values of pixels by applying Laplacian operations
on the images and subsequently improved the depth
map using a Gaussian distribution method. Ali et al.
(Ali and Mahmood, 2022) proposed a method to opti-
mize focus volume by designing an energy minimiza-
tion function which contains smoothness and struc-
tural similarity along with the data term. Some deep-
Ahmad, B., Farup, I. and Floor, P.
Anisotropic Diffusion for Depth Estimation in Shape from Focus Systems.
DOI: 10.5220/0012303400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
85-89
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
85

learning-based methods have also been proposed to
estimate the depth maps using the SFF method (Mu-
tahira et al., 2021b), (Dogan, 2023).
A variety of techniques have been proposed to im-
prove the initial depth map by enforcing a smooth-
ness constraint. Tseng et al. (Tseng and Wang,
2014) introduced a maximum a posteriori framework,
which integrates a prior spatial consistency model
for depth reconstruction. Moeller et al. (Moeller
et al., 2015) proposed a variational method which in-
clude non-convex data fidelity term and a convex non-
smooth regularization term to remove noise and im-
prove depth maps. The smoothness constraint is usu-
ally employed with the L2 regularization, which tends
to smoothen the sharp edges and other structural de-
tails due to linear diffusion. Therefore, in this paper,
we emphasize on preserving the structural edges and
fine details in enhanced depth maps.
This article provides an efficient method for
improving the initial depth map using an energy
minimization-based framework. The framework in-
troduces a nonlinear, spatial technique, known as
anisotropic diffusion (AD) (Perona and Malik, 1990),
to serve as a smoothness constraint. The primary goal
of AD in our application is to reduce surface noise
while preserving the edges, lines, and other critical
details necessary for accurate surface interpretation in
the SFF systems. AD can be considered as a fusion of
L2 and L1 regularization techniques. Similar to the
L2 regularization, it promotes smoothing within re-
gions of an image with similar intensity values, pre-
serving image structure and reducing noise. At the
same time, it shares similarities with L1 regulariza-
tion, as it selectively preserves sharp edges and crit-
ical features. This combination allows AD to strike
a balance between retaining fine details while effec-
tively minimizing unwanted noise. The AD is com-
bined with a fidelity term consisting of the focus val-
ues of the initial depth to iteratively converge the in-
correct depth points to their true depth values. The
proposed method is rigorously evaluated using both
real-world and synthetic datasets and also compared
with the L2 regularizer.
The remainder of the article is organized as fol-
lows. Section 2 explains the proposed methodology.
In Section 3 both real and synthetic datasets are dis-
cussed. Initial and improved depth maps are also
compared with each other, and lastly, Section 4 con-
cludes the article.
2 PROPOSED METHOD
The proposed SFF system is depicted in Figure 1. In
the first step, an initial depth map is computed by
applying the traditional SFF method (Pertuz et al.,
2013). For this purpose, an FM operator is applied to
the image sequence. An FM operator serves as a high-
pass filter, effectively isolating the high-frequency
content from the low-frequency content. It achieves
this by enhancing the focused pixels while suppress-
ing the defocused ones. The operator calculates the
sharpness of each pixel within the image sequence
I(i, j) to obtain an image focus volume F(i, j), which
is given as,
F
k
(i, j) = FM ∗ I
k
(i, j), (1)
where, ∗ is a 2D convolution operator and k repre-
sents an image index. Using the image focus volume,
a depth map is constructed by traversing along the op-
tical axis and identifying the image numbers that cor-
respond to the maximum focus value for each object
point. The resulting depth map is called the initial
depth map z
o
, which is given as,
z
o
(i, j) = argmax
k
(F
k
(i, j)). (2)
We propose the improvement of the z
o
through the
formulation of an energy minimization-based frame-
work. The energy model consists of a smoothness
term and a data fidelity term, which is given as fol-
lows,
E(z, ∇z) = E
s
(∇z) + λE
f
(z), (3)
where, λ is a weighting factor between the fidelity
term and the smoothness term. The objective is to ob-
tain an optimized depth z that minimizes the energy
function provided in Equation (3). The fidelity term
E
f
(z) is designed using z
o
and focus values of initial
depth points F(z
o
). E
f
(z) is computed over the image
domain (Ω ⊂ R
2
) which is given as,
E
f
(z) =
Z
Ω
F(z
o
) | z − z
o
|
2
dΩ. (4)
The Equation (4) is designed to prioritize the best-
focused regions in the image, contributing to provide
a more reliable prior within the minimization frame-
work presented in Equation (3).
To impose AD as a smoothness constraint, a 2 ×
2 structure tensor S is derived (Di Zenzo, 1986), as
a first step from the gradient of the initial depth z
o
,
and then updated with subsequent z’s in each iteration.
The S is given as,
S = ∇z ⊗ ∇z, (5)
where, ⊗ represents the tensor product. Subsequently,
we obtain the eigenvalues (λ
+
, λ
−
) and eigenvectors
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
86

(θ
+
, θ
−
) of the S, similar to (Sapiro and Ringach,
1996). The diffusion tensor D is derived from
(λ
+
, λ
−
) and (θ
+
, θ
−
), which is given as,
D =
∂ψ
∂λ
+
θ
+
⊗ θ
+
+
∂ψ
∂λ
−
θ
−
⊗ θ
−
. (6)
In terms of (λ
+
, λ
−
), the Lagrangian density ψ can be
written as (Tschumperl
´
e and Deriche, 2005),
E
s
(∇z) =
Z
Ω
ψ(λ
+
, λ
−
)dΩ. (7)
Equation (7) is combined with Equation (4), which
can be written as,
E(z, ∇z) =
Z
Ω
ψ(λ
+
, λ
−
)+λF(z
o
) | z−z
o
|
2
dΩ. (8)
The solution to Equation (8) is given by Euler-
Lagrange PDE,
∇ · (D∇z) − λF(z
o
)(z − z
o
) = 0. (9)
Equation (6) is solved with gradient descent such as,
∂z
∂t
= ∇ · (D∇z) − λF(z
o
)(z − z
o
), (10)
using explicit Euler time integration. It is to be noted
that the proposed method is not restricted to any par-
ticular FM operator. Instead, it is designed to be
generic, allowing the utilization of any FM operator
to compute the initial depth z
o
.
3 EXPERIMENTS
3.1 Datasets
The proposed method is tested on both synthetic and
real datasets, shown in Figure 2. The real dataset con-
tains the images of Real cone, LCD-TFT filter, and
Measuring tape. Real cone and LCD-TFT filter are
taken from (Mutahira et al., 2021a), whereas Mea-
suring tape is taken from (PureMoCo, 2017). For
synthetic data, three distinct models are selected: a
torus, a mountain, and a colon region. The torus and
the mountain models are constructed using Blender
1
software. Meanwhile, the colon model is taken from
(
˙
Incetan et al., 2021) to demonstrate the viability
of the SFF method as a potential 3D reconstruc-
tion approach for future Wireless Capsule Endoscope
(WCE) applications, especially with the prospect of
focus-controlled cameras becoming available in the
future (Ahmad et al., 2023b).
The synthetic models are placed in front of a focus
controlled camera and images are taken by changing
1
https://www.blender.org/
(a) Cone (b) LCD (c) Measuring tape
(d) Torus (e) Mountain (f) Colon
Figure 2: Sample images from three real (a-c) and three
synthetic (d-f) image sequences.
(a) Torus (b) Mountain (c) Colon
Figure 3: Ground truth depth maps for synthetic image se-
quences.
the focus distance of the camera with a constant step
size. In each image, a certain area of the scene is kept
in focus, while the rest remain defocused. For each
object, a series of 15 to 20 images are captured and
stored in Portable Network Graphics (PNG) file for-
mat.
To establish a meaningful comparison between the
reconstructed surfaces and the ground-truth models,
the Python API in Blender is used to modify the mod-
els accordingly. When a model is positioned under
a perspective camera, certain vertices or areas may
become occluded, falling outside the camera’s field
of view. Therefore, to accurately assess the accuracy
of the SFF algorithm, it becomes imperative to ex-
clude all occluded vertices and construct a model that
comprises only those vertices situated within the cam-
era frustum and visible to the camera. The modified
ground truth models of synthetic data are shown in
Figure 3.
3.2 Results
The modified Laplacian method (Nayar and Naka-
gawa, 1994) is applied to the image stack to compute
the focus volume. The initial depth map z
o
is recon-
structed using Equation (2). Both z
o
and F(z
o
) are
Anisotropic Diffusion for Depth Estimation in Shape from Focus Systems
87
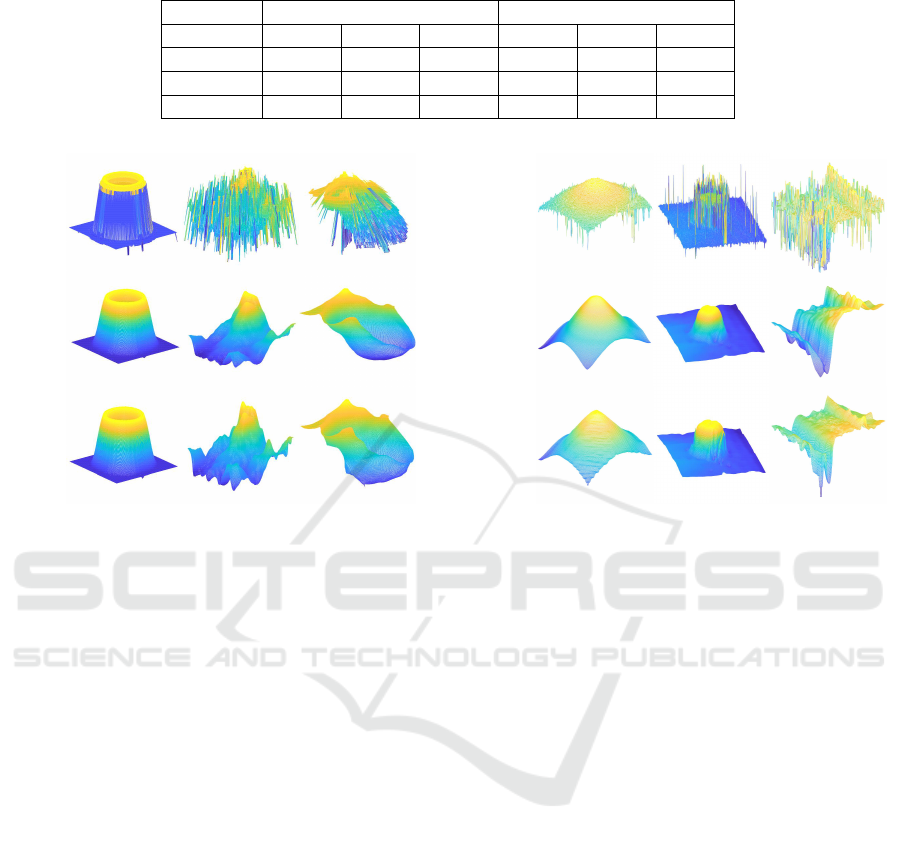
Table 1: Quantitative evaluation for synthetic dataset.
Objects RMSE Correlation
Initial L2 AD Initial L2 AD
Torus 0.0050 0.0036 0.0032 0.9599 0.9797 0.9835
Mountain 0.0167 0.0081 0.0073 0.7782 0.9521 0.9612
Colon 0.1227 0.1010 0.0947 0.8760 0.9179 0.9281
L2
Proposed
Torus Mountain Colon
Initial
Figure 4: Reconstructed depth maps for synthetic data.
subsequently employed in Equation (10) to rectify in-
accurate depth points. The value of λ is different for
different cases and empirical in our experiment. The
proposed method is also compared with the L2 regu-
larizer (Ahmad et al., 2023a) to show the effectiveness
of the method. The surfaces reconstructed from syn-
thetic and real data are shown in Figures 4 and 5, re-
spectively, where the first row shows the initial depth,
while the second and third rows show the depth re-
covered using the L2 and the proposed method, re-
spectively.
The depth maps for synthetic data are com-
pared with the ground-truth models by measuring the
RMSE and the correlation. The selection of these
methods has been made to evaluate different aspects
of the reconstructed surfaces. The correlation is cho-
sen to assess the quality of the reconstructed shapes,
independent of the scale and position. RMSE is scale-
dependent and evaluates the geometric deformation of
the reconstructed shapes. Table 1 shows the quantita-
tive evaluation of the synthetic dataset. The proposed
method achieves higher correlation and lower RMSE
for all three objects. The proposed method success-
fully addresses incorrect depth points, resulting in sig-
nificant improvements in reconstruction.
The initial depth map, obtained from the focus
values, exhibits numerous inaccuracies, possibly due
to low-frequency variations in certain areas of the ob-
L2
Proposed
Cone LCD Measuring tape
Initial
Figure 5: Reconstructed depth maps for real data.
jects. As a consequence, the focus values acquired
in those regions are erroneous, leading to incorrect
depth points. With the proposed method, depth points
with higher focus values are trusted and retained in
their original positions. Conversely, depth points with
lower focus values are mistrusted and neighboring
depth values are given more significance to adjust
their depth values. This iterative procedure facilitates
the gradual convergence of erroneous depth points to-
wards their true depth values, thereby yielding a re-
fined and more accurate depth map. The proposed
method improves the overall precision and reliability
of the results, as can be confirmed by examining Table
1 and by visual analysis of Figure 4 and Figure 5.
The proposed method is also compared with the
L2 regularizer. Although the L2 regularizer has
demonstrated an improvement in the initial depth
map, it is observed that the application of the L2 reg-
ularizer resulted in smoothing of the intricate details
within the structure, as can be confirmed by visually
inspecting Figure 4 and Figure 5. On the other hand,
the proposed method manages to preserve a signifi-
cant portion of these fine details. Furthermore, the
proposed method exhibits an overall increase in accu-
racy of almost 10% over the L2 regularizer in terms
of RMSE.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
88

4 CONCLUSION
This article presents an energy minimization-based
framework to improve the depth map for the SFF
method. The framework has been formulated with
AD as a smoothness constraint and a fidelity term,
which incorporates the focus value of the initial depth
to improve the overall structure of the scene. Experi-
ments are conducted with real and synthetic datasets.
For synthetic dataset, both z
o
and z are also compared
with ground truth by measuring RMSE and correla-
tion. The results indicate that the proposed method
can significantly improve the accuracy of the depth
map by removing noise and preserving the structural
details of the scene. The proposed method is also
compared with the L2 regularizer, demonstrating a
substantial 10% improvement in terms of RMSE over
it.
ACKNOWLEDGEMENTS
This work was supported by the Research Council of
Norway through the project CAPSULE under Grant
300031.
REFERENCES
Ahmad, B., Farup, I., and Floor, P. A. (2023a). 3D recon-
struction of gastrointestinal regions using shape-from-
focus. In Fifteenth International Conference on Ma-
chine Vision (ICMV 2022), volume 12701, pages 463–
470. SPIE.
Ahmad, B., Floor, P. A., and Farup, I. (2022). A compar-
ison of regularization methods for near-light-source
perspective shape-from-shading. In 2022 IEEE In-
ternational Conference on Image Processing (ICIP),
pages 3146–3150. IEEE.
Ahmad, B., Floor, P. A., Farup, I., and Hovde, Ø. (2023b).
3D reconstruction of gastrointestinal regions using
single-view methods. IEEE Access.
Ali, U. and Mahmood, M. T. (2021). Robust focus volume
regularization in shape from focus. IEEE Transactions
on Image Processing, 30:7215–7227.
Ali, U. and Mahmood, M. T. (2022). Energy minimization
for image focus volume in shape from focus. Pattern
Recognition, 126:108559.
Di Zenzo, S. (1986). A note on the gradient of a multi-
image. Computer vision, graphics, and image pro-
cessing, 33(1):116–125.
Dogan, H. (2023). A higher performance shape from focus
strategy based on unsupervised deep learning for 3d
shape reconstruction. Multimedia Tools and Applica-
tions, pages 1–24.
He, M., Zhang, J., Shan, S., and Chen, X. (2022). En-
hancing face recognition with self-supervised 3d re-
construction. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 4062–4071.
˙
Incetan, K., Celik, I. O., Obeid, A., Gokceler, G. I., Ozy-
oruk, K. B., Almalioglu, Y., Chen, R. J., Mahmood,
F., Gilbert, H., Durr, N. J., et al. (2021). VR-Caps: A
virtual environment for capsule endoscopy. Medical
image analysis, 70:101990.
Moeller, M., Benning, M., Sch
¨
onlieb, C., and Cremers,
D. (2015). Variational depth from focus recon-
struction. IEEE Transactions on Image Processing,
24(12):5369–5378.
Mutahira, H., Ahmad, B., Muhammad, M. S., and Shin,
D. R. (2021a). Focus measurement in color space for
shape from focus systems. IEEE Access, 9:103291–
103310.
Mutahira, H., Muhammad, M. S., Li, M., and Shin, D.-
R. (2021b). A simplified approach using deep neural
network for fast and accurate shape from focus. Mi-
croscopy Research and Technique, 84(4):656–667.
Nayar, S. K. and Nakagawa, Y. (1994). Shape from focus.
IEEE Transactions on Pattern analysis and machine
intelligence, 16(8):824–831.
¨
Ozyes¸il, O., Voroninski, V., Basri, R., and Singer, A.
(2017). A survey of structure from motion*. Acta
Numerica, 26:305–364.
Perona, P. and Malik, J. (1990). Scale-space and edge de-
tection using anisotropic diffusion. IEEE Transac-
tions on pattern analysis and machine intelligence,
12(7):629–639.
Pertuz, S., Puig, D., and Garcia, M. A. (2013). Analysis of
focus measure operators for shape-from-focus. Pat-
tern Recognition, 46(5):1415–1432.
PureMoCo (2017). PureMoCo. Focus-zoom-unit (mo-
torized follow focus) 1:15–2:23. YouTube. https:
//www.youtube.com/watch?v=KFryXjYbTJc. Ac-
cessed: 2020-11-06.
Sapiro, G. and Ringach, D. L. (1996). Anisotropic diffu-
sion of multivalued images with applications to color
filtering. IEEE transactions on image processing,
5(11):1582–1586.
Tschumperl
´
e, D. and Deriche, R. (2005). Vector-valued
image regularization with pdes: A common frame-
work for different applications. IEEE transactions on
pattern analysis and machine intelligence, 27(4):506–
517.
Tseng, C.-Y. and Wang, S.-J. (2014). Shape-from-focus
depth reconstruction with a spatial consistency model.
IEEE Transactions on Circuits and Systems for Video
Technology, 24(12):2063–2076.
Verbin, D. and Zickler, T. (2020). Toward a universal
model for shape from texture. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 422–430.
Anisotropic Diffusion for Depth Estimation in Shape from Focus Systems
89
