
Generative Texture Super-Resolution via Differential Rendering
Milena Bagdasarian
1
, Peter Eisert
1,2
and Anna Hilsmann
1
1
Fraunhofer Heinrich-Hertz-Institute, Berlin, Germany
2
Humboldt University of Berlin, Germany
Keywords:
Texture Super-Resolution, Differentiable Rendering, GAN.
Abstract:
Image super-resolution is a well-studied field that aims at generating high-resolution images from low-
resolution inputs while preserving fine details and realistic features. Despite significant progress on regular
images, inferring high-resolution textures of 3D models poses unique challenges. Due to the non-contiguous
arrangement of texture patches, intended for wrapping around 3D meshes, applying conventional image super-
resolution techniques to texture maps often results in artifacts and seams at texture discontinuities on the mesh.
Additionally, obtaining ground truth data for texture super-resolution becomes highly complex due to the labor
intensive process of hand-crafting ground truth textures for each mesh. We propose a generative deep learning
network for texture map super-resolution using a differentiable renderer and calibrated reference images. Com-
bining a super-resolution generative adversarial network (GAN) with differentiable rendering, we guide our
network towards learning realistic details and seamless texture map super-resolution without a high-resolution
ground truth of the texture. Instead, we use high-resolution reference images. Through the differentiable ren-
dering approach, we include model knowledge such as 3D meshes, projection matrices, and calibrated images
to bridge the domain gap between 2D image super-resolution and texture map super-resolution. Our results
show textures with fine structures and improved detail, which is especially of interest in virtual and augmented
reality environments depicting humans.
1 INTRODUCTION
Image super-resolution (SR) is an extensively re-
searched topic where a high-resolution image is esti-
mated from a low-resolution input. It aims not only
at increasing the pixel count but also at recovering
fine details and realistic features. Research on this
problem has produced many statistical, model, and
learning-based approaches (Yang et al., 2014). How-
ever, due to the ill-posed nature of the task, inferring a
high-resolution image from its low-resolution version
remains an active area of research.
In recent years, the widespread adoption of virtual
and augmented reality (VR/AR) has sparked an in-
creasing interest in creating realistic human 3D mod-
els. One particular area of focus is the creation of
highly detailed and lifelike personal avatars (Eisert
et al., 2022). Alongside the development of 3D mod-
els for virtual humans, there is a growing need for
super-resolving and improving their textures. While
texture maps can be represented as 2D images, super-
resolving them poses new challenges. Since the tex-
tures are intended to be wrapped around 3D meshes,
they are often arranged in non-contiguous patches,
which can introduce distortions when viewed in im-
age space. Therefore, applying a regular image SR
approach to a texture map would inevitably lead to the
creation of artifacts and seams at the texture disconti-
nuities when applied to a mesh. Consequently, texture
super-resolution algorithms must address these spe-
cific challenges.
Learning-based super-resolution networks of-
ten rely on supervision and, consequently, high-
resolution ground truth images (Wang et al., 2021a).
However, in the context of textures, obtaining ground
truth data becomes considerably more complex.
For every mesh, a hand-crafted ground truth tex-
ture would be required, necessitating an impractical
amount of manual effort. Although captured images
of the object or subject under study can potentially
provide the necessary details for super-resolution,
they do not directly present these details in texture
space, rendering them unsuitable as direct ground
truth substitutes.
To address these challenges, we contribute to the
advancement of texture super-resolution techniques,
282
Bagdasarian, M., Eisert, P. and Hilsmann, A.
Generative Texture Super-Resolution via Differential Rendering.
DOI: 10.5220/0012303300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
282-289
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
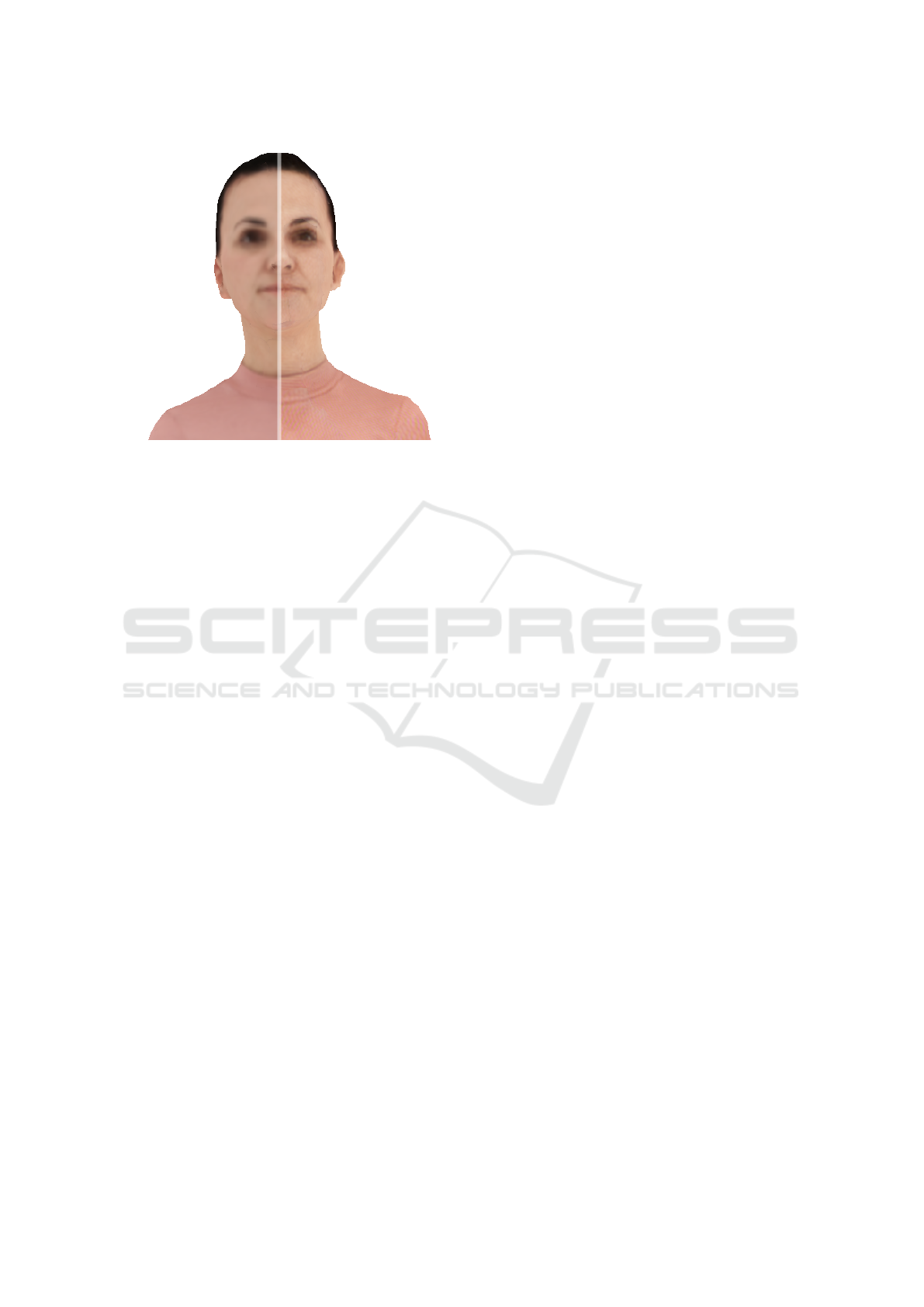
Figure 1: Rendered 3D model with a low resolution versus
a super-resolved texture.
specifically addressing the challenges that arise in
the context of 3D mesh textures. For this, we pro-
pose a generative texture super-resolution architec-
ture that leverages a differentiable renderer to bridge
the domain gap between texture space and images.
In our proposed architecture, a generator network is
employed to super-resolve a low-resolution texture,
while a discriminator network distinguishes between
a mesh rendering with the super-resolved texture and
the real-world images of the object. By utilizing this
approach, we eliminate the need for a ground-truth
texture during the training of our model. To validate
the effectiveness of our approach, we evaluate our
model on volumetric sequences of humans, where we
demonstrate its ability to enhance the visual fidelity
of the textures. Our experimental results demonstrate
the potential of our approach to significantly improve
the visual quality and realism of textures, paving the
way for the creation of highly detailed and lifelike
personal avatars in virtual and augmented reality ap-
plications, generated from volumetric capturings of
humans (Paier et al., 2023; Hilsmann et al., 2020).
2 RELATED WORK
2.1 Super-Resolution
Texture super-resolution aims at enhancing the res-
olution and details of texture maps, which plays a
crucial role in creating realistic and highly detailed
3D models, particularly in virtual and augmented re-
ality (VR/AR) environments. The field of texture
map super-resolution has evolved from traditional im-
age super-resolution problems but poses specific chal-
lenges as the texture space is defined on the mesh sur-
face rather than on a 2-dimensional image grid. Early
image super-resolution methods predominantly re-
lied on interpolation-based techniques which compute
color values based on the local neighborhood of pix-
els. However, this cannot guarantee the recovery of
high-frequency details (Glasner et al., 2009). Model-
based approaches interpret the low-resolution image
as a downsampled version of the high resolution im-
age and integrate a-priori knowledge on smoothness
or similarity in order to solve for the high-resolution
image (Ancuti et al., 2018; Wang et al., 2021b). In re-
cent years, learning-based approaches have emerged
as a dominant paradigm for image super-resolution.
Deep learning models, such as using Transformer (Lu
et al., 2022; Cao et al., 2022), Convolutional Neu-
ral Networks (CNN) (Dong et al., 2014), employ-
ing sub-pixel convolutions (Shi et al., 2016), Lapla-
cian pyramid networks (Lai et al., 2017) or Genera-
tive Adversarial Networks (GAN) (Ledig et al., 2017;
Wang et al., 2018), have demonstrated remarkable
success in capturing intricate details and realistic fea-
tures. These models learn the mapping between low-
resolution and high-resolution texture maps by lever-
aging large-scale datasets of paired texture examples.
However, image super-resolution networks are
usually limited to a regular 2D image space. While
texture maps can be represented through 2D images,
neighboring pixels in the texture space do not auto-
matically correspond to neighboring pixels after pro-
jection. Therefore, classical image SR approaches
are not suitable for texture map super-resolution as
they may produce unwanted distortions and seams be-
tween patches when applied to texture maps.
Only a handful of papers have addressed these chal-
lenges of texture map or appearance super-resolution.
Some approaches overcome the domain gap between
texture and image space by leveraging multi-view
datasets (Cheng et al., 2022; Richard et al., 2019;
Tsiminaki et al., 2019; Goldluecke and Cremers,
2009), exploiting temporal redundancy (Tsiminaki
et al., 2019), and jointly optimizing geometry and
texture (Maier et al., 2017). Li et al. incorporated
geometric information by introducing normal maps
in order to guide the super-resolution of texture im-
ages by interpreting them as high-level features (Li
et al., 2019). Recently, Ranade et al. introduced a ren-
dering loss using differentiable rendering and high-
resolution ground-truth textures as well as the geom-
etry for training (Ranade et al., 2022).
However, often, these works assume ground truth
high resolution textures for training. Especially for
objects that have been reconstructed from real-world
image data, such as capturings of human perfor-
Generative Texture Super-Resolution via Differential Rendering
283

mances, high-resolution versions of the textures are
not available as the textures have been created by fus-
ing and merging multi-view image data. Pesavento
et al. addressed this problem especially for the case
of 4D captured human performances by transferring a
super-resolution texture captured with high-resolution
static cameras to a dynamic video performance cap-
ture (Pesavento et al., 2021). However, while this ap-
proach transfers high resolution texture details onto a
dynamic performance, all the dynamic dependent de-
tails (wrinkling of clothes etc.) get lost with this ap-
proach.
We propose a new appearance super-resolution ap-
proach in which we rely on a learning-based net-
work architecture and include structural information
in the form of meshes through differentiable render-
ing. In contrast to existing approaches that require
high-resolution ground-truth textures, we only use
high-resolution reference images.
2.2 Differentiable Rendering
In Computer Graphics, rendering plays a crucial role
in simulating the forward image formation process,
which involves generating visually realistic images
from 3D scenes by considering various factors such as
material properties, lighting conditions, camera set-
tings, and geometric information. However, a com-
mon limitation faced by renderers is their discretiza-
tion step during rasterization, which leads to a loss
of differentiability and hampers their integration with
machine learning models.
The demand for differentiable renderers has
emerged to address this limitation and enables the
seamless incorporation of the rendering process into
gradient-based optimization techniques that leverage
backpropagation. While some existing approaches,
such as OpenDR (Loper and Black, 2014) and the
neural 3D mesh renderer (Kato et al., 2018), pro-
vide more traditional rasterization methods and ap-
proximate the rendering gradient during backpropa-
gation, other approaches offer fully differentiable ren-
dering functions. Examples of such approaches in-
clude the PyTorch3D renderer (Johnson et al., 2020),
SoftRas (Liu et al., 2019), and a study by Laine et
al. (Laine et al., 2020). Additionally, differentiable
rendering of point clouds has been demonstrated in
a previous work by Insafutdinov et al. (Insafutdinov
and Dosovitskiy, 2018). More realistic rendering re-
sults yet at a higher computing cost are provided by
differentiable ray tracing methods, such as those pro-
posed by Li et al. (Li et al., 2018) and Nimier-David
et al. (Nimier-David et al., 2019).
We use the PyTorch3D renderer (Johnson et al.,
2020) to include model knowledge into our learning-
based super-resolution approach. We show that tex-
ture super-resolution can be learned from reference
images instead of high-resolution ground truth tex-
tures.
3 OVERVIEW AND
ARCHITECTURE
In our proposed GAN-based texture super-resolution
architecture, we leverage the power of a differentiable
renderer. The overall framework consists of three key
components: a generator (G), a differentiable ren-
derer (DR), and a discriminator (D). The generator is
responsible for super-resolving a low-resolution tex-
ture, while the differentiable renderer is used to ren-
der the mesh with the generated texture. Finally, the
discriminator plays a crucial role in distinguishing be-
tween the mesh rendering with the super-resolved tex-
ture and a real-world image of the object or subject.
To construct our texture generating network,
we draw inspiration from the architecture of SR-
GAN (Ledig et al., 2017), which is a deep learning
framework for achieving photo-realistic single image
super-resolution. The generator in our network fol-
lows the design principles outlined in (Ledig et al.,
2017) and is composed of 16 residual blocks (He
et al., 2016) that are identical in structure. How-
ever, instead of employing the sub-pixel convolution
layers proposed in SRGAN, we employ up-sampling
layers to increase the resolution of the generated tex-
ture. On the other hand, the discriminator network,
which plays a critical role in assessing the realism of
the super-resolved textures, consists of eight convolu-
tion layers, two dense layers, and utilizes a sigmoid
activation function for classifying the probability of
the input being real or fake, following the approach
in (Ledig et al., 2017).
While the SRGAN architecture is well-suited for
2D image super-resolution, our objective focuses on
enhancing texture maps. To bridge this gap, we intro-
duce a differentiable renderer (Johnson et al., 2020)
between the generator and discriminator networks.
This renderer facilitates the integration of the gen-
erated textures onto a mesh and enables the evalua-
tion of the rendered results against real-world images.
By leveraging the differentiable renderer, we can ex-
ploit the benefits of gradient-based optimization tech-
niques, allowing us to train the network. more effec-
tively and generate high-quality super-resolved tex-
ture maps. Figure 2 illustrates the architecture of our
texture generating network, showcasing the interac-
tions between the generator, differentiable renderer,
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
284
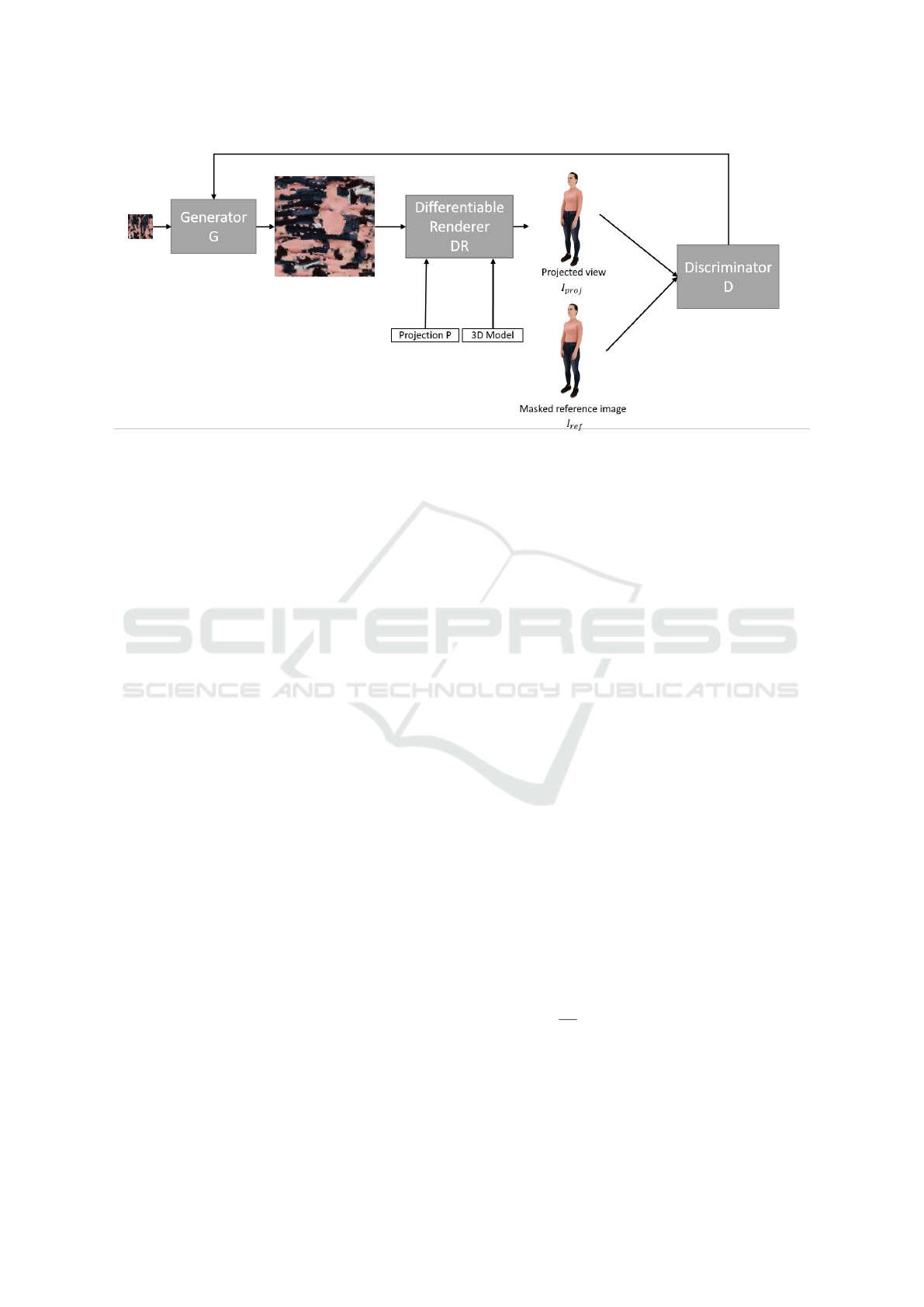
Figure 2: Architecture overview. Given a low-resolution texture (T
LR
), a 3D model, a projection matrix, and a calibrated
reference image I
re f
, we synthesize a high resolution texture T
HR
through the generator. We project the 3D model and its
generated high-resolution texture (T
HR
) and compare this projection to the corresponding masked reference image.
and discriminator components.
During the training phase, the generator module
takes a low-resolution texture map denoted as T
LR
as input. The primary objective of the generator is
to produce a corresponding high-resolution texture
map denoted as T
HR
. This process enables the en-
hancement of the details and quality of the input tex-
ture map. To incorporate model knowledge into the
training process, we provide the high-resolution tex-
ture map T
HR
along with additional information, in-
cluding a 3D mesh representation and a projection
matrix denoted as P, to the differentiable renderer.
The differentiable renderer takes these inputs and
generates a textured and projected mesh, denoted as
I
pro j
. To evaluate the realism and fidelity of the ren-
dered output, we compare I
pro j
with a calibrated high-
resolution reference image denoted as I
re f
, which de-
picts the same person in the same pose. However, to
account for unwanted backgrounds and focus solely
on the person of interest, we apply a segmentation
mask computed from the 3D model. This segmen-
tation mask effectively isolates the person in the pho-
tograph, allowing us to concentrate on the quality of
the texture super-resolution. We exclusively utilize
low-resolution textures and high-resolution images
from the volumetric dataset. This approach eliminates
the need for high-resolution textures in the training
phase, as we focus on learning the mapping between
low-resolution textures and their corresponding high-
resolution counterparts.
Once the training phase is completed, during in-
ference or the application phase, we only utilize the
generator component of our network. Given a spe-
cific low-resolution texture map, the generator is em-
ployed to super-resolve the input, producing a high-
resolution texture map that exhibits enhanced details
and improved quality.
3.1 Loss Functions
In the generator module of our network, we in-
corporate two essential pixel-wise loss functions to
guide the training process: a content loss based on a
pre-trained VGG19 network and an adversarial loss.
These losses contribute to the overall network loss,
denoted as L
SR
, which is formed as a weighted sum
of the individual losses. Here, λ
a
and λ
b
represent the
respective weights for the losses.
The total network loss L
SR
is defined as follows:
L
SR
= λ
a
L
T
MSE
+ L
P
MSE
+ L
vgg
i j
MSE
+ λ
b
L
SR
BCE
(1)
To enforce color coherence between the low-
resolution input texture T
LR
and the generated high-
resolution output texture T
HR
, we calculate a texture
loss termed L
T
MSE
(Eq. 2), expressed as a pixel-wise
mean squared error (MSE) between the two textures.
In particular, we employ a down-sampled version of
the generated texture, denoted as T
ds
HR
to avoid the
need for the introduction of a ground truth texture into
our network. This texture loss can be formulated as
follows:
L
T
MSE
=
1
wh
w
∑
x=1
h
∑
y=1
(T
LR
(x, y) − T
ds
HR
(x, y))
2
(2)
Furthermore, we introduce a projection loss de-
noted as L
P
MSE
, which represents the mean squared er-
ror between the output of the differentiable renderer
(I
pro j
) and the masked reference image (I
re f
). This
Generative Texture Super-Resolution via Differential Rendering
285
loss ensures that the rendered and projected 3D model
aligns well with the corresponding reference image.
The projection loss can be computed as follows:
L
P
MSE
=
1
wh
w
∑
x=1
h
∑
y=1
(I
pro j
(x, y) − I
re f
(x, y))
2
(3)
Additionally, we incorporate a content loss L
vgg
i j
MSE
,
which quantifies the discrepancy between the ren-
dered output (I
pro j
) and the reference image (I
re f
) in
the feature-space. Inspired by the approach presented
in (Ledig et al., 2017), we extract features from a pre-
trained VGG19 model after the j-th convolution layer
and before the i-th max-pooling layer. The content
loss is defined as follows:
L
vgg
i j
MSE
=
1
wh
∑
w
x=1
∑
h
y=1
(vgg
i j
(I
pro j
)(x, y) − vgg
i j
(I
re f
)(x, y))
2
(4)
Lastly, the adversarial loss, denoted as L
SR
BCE
, plays
a central role in aligning the distribution of the gen-
erated high-resolution textures with that of the target
textures. This loss is formulated as a binary cross-
entropy loss, where D(G(T
LR
)) represents the prob-
ability that the reconstructed image is a target high-
resolution texture. The adversarial loss can be ex-
pressed as:
L
SR
BCE
=
N
∑
n=1
−logD(G(T
LR
)) (5)
By incorporating these diverse loss components
in our generator module, we enable a comprehen-
sive and multi-faceted training process that empha-
sizes color coherence, texture fidelity, and adversarial
learning. These losses collectively contribute to the
training objective and guide the generator in produc-
ing high-quality super-resolved textures.
3.2 Input Data
To conduct our experiments and evaluate the perfor-
mance of our proposed method, we rely on a carefully
curated dataset (see Fig. 3) consisting of volumetric
video sequences of human performances. Each frame
within the dataset possesses its own reconstructed 3D
model, corresponding texture map, and a set of 32
calibrated high-resolution images. The acquisition of
this dataset involved capturing volumetric video in
a specialized studio setting that was specifically de-
signed to capture human subjects. The studio setup
includes a total of 32 RGB cameras arranged in 16
stereo pairs, effectively covering the subject from all
angles.
The data pipeline employed in the acquisition pro-
cess is detailed in (Schreer et al., 2019), providing a
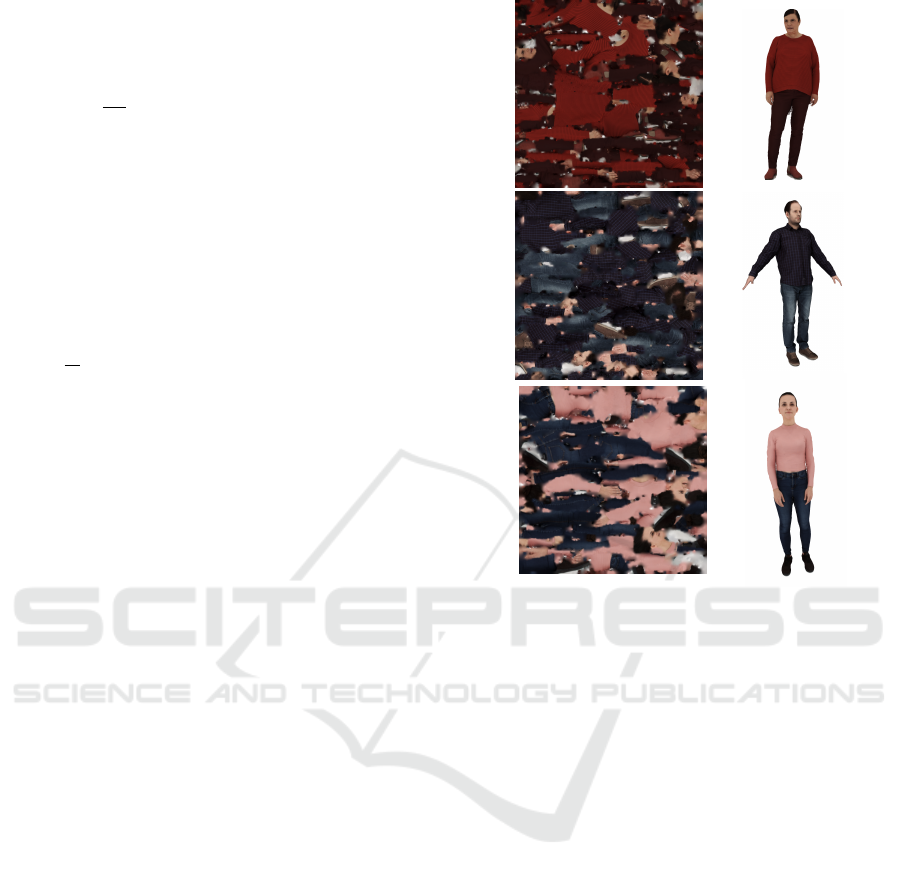
Figure 3: Texture and projected mesh, example frames from
the dataset.
comprehensive overview of the steps involved in cap-
turing and processing the volumetric video sequences.
In our study, we specifically focus on the recorded
volumetric sequences that have a minimum length of
800 frames. Consequently, this results in an equiva-
lent number of 3D models available for each recorded
subject within the dataset. It is worth noting that the
cameras utilized in the setup are accurately calibrated
to ensure consistency and alignment between differ-
ent views and frames.
4 EXPERIMENTS AND RESULTS
In our training process, we adopt a systematic ap-
proach by dividing the available texture maps into
three separate sets, each corresponding to a different
volumetric sequence. We utilize all the available tex-
tures within each set and train our network architec-
ture accordingly. The training process is stopped af-
ter 20 epochs to prevent overfitting and to ensure that
the network has effectively learned the desired tex-
ture enhancement. It is important to note that we do
not employ any pre-training for our network architec-
ture. However, we incorporate a pre-trained VGG19-
layer model in the content loss calculation to lever-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
286

Figure 4: Rendered 3D model with a low resolution versus
a super-resolved texture.
age its learned representations. During each training
step, a random image is selected from the 32 avail-
able camera views to be compared with the projec-
tion generated by the network. We refrain from using
high-resolution textures as ground truth, as our ob-
jective is to enhance the textures based solely on the
information contained within the reference images.
To ensure that our network captures the individ-
ual characteristics and nuances of each human 3D
model, we train a separate model for each volumetric
sequence. By adopting this approach, we can tailor
the training process to the specific characteristics and
variations present in each sequence, ultimately lead-
ing to more accurate and personalized texture super-
resolution.
In Figure 4, we present a visual comparison be-
tween the rendered 3D model with a low-resolution
texture (left) and the same model with a super-
resolved texture (right). The improvement in texture
quality and detail is evident, highlighting the effec-
tiveness of our approach.
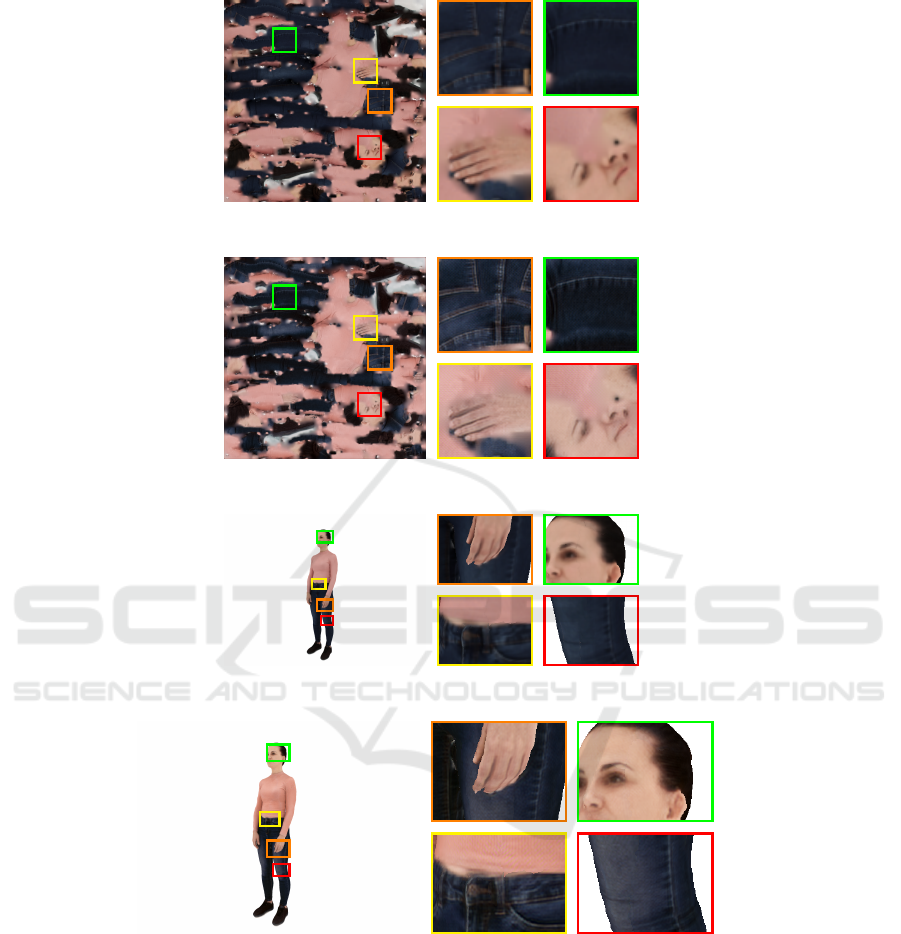
Furthermore, in Figure 5, we showcase an exam-
ple of a low-resolution input texture and the signifi-
cant increase in resolution achieved in the generated
texture. Additionally, we display the corresponding
projected images, including the low-resolution pro-
jection and the projection with the generated high-
resolution texture. Notably, our results demonstrate
enhanced fine details, such as the seams of the cloth-
ing, such as the jeans’ pocket, as well as improve-
ments in the representation of eyes and hair. It is
important to emphasize that the super-resolved de-
tails in our outputs are not directly derived from high-
resolution ground-truth textures but rather extracted
and introduced through the discrimination process
and loss backpropagation, leveraging the information
captured in the reference images I
re f
. As a result,
our approach minimizes visible seams when applied
to the 3D mesh, ensuring a more coherent and visu-
ally appealing texture enhancement.
5 CONCLUSION AND FUTURE
WORK
In this paper, we have proposed a GAN-based tex-
ture super-resolution approach that incorporates a dif-
ferentiable renderer to super-resolve texture maps in
volumetric video sequences. The differential renderer
enables us to directly address the problem of super-
resolution in texture space instead of image space.
Our training process involves pixel-wise losses, in-
cluding content loss based on a pre-trained VGG19
network and adversarial loss, to guide the genera-
tor in learning the mapping between low-resolution
and high-resolution textures. Experimental results
have demonstrated significant improvements in tex-
ture quality, capturing fine details and realistic repre-
sentation of clothing, hair, and facial features. Our
work contributes to advancements in texture super-
resolution and holds promise for applications in vir-
tual reality, gaming, and computer animation. Fu-
ture work includes leveraging the similarity of con-
secutive volumetric sequence frames as is common in
video super-resolution. Furthermore, different super-
resolution base architectures will be explored, and the
ability to generalize to new meshes will be studied.
ACKNOWLEDGEMENTS
This work has been funded by the German Federal
Ministry of Education and Research (BMBF) through
the Research Program MoDL under contract no. 01 IS
20044.
REFERENCES
Ancuti, C., Ancuti, C. O., and Timofte, R. (2018). Ntire
2018 challenge on image dehazing: Methods and re-
sults. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR) Work-
shops, Salt Lake City, US.
Cao, J., Liang, J., Zhang, K., Li, Y., Zhang, Y., Wang,
W., and Gool, L. V. (2022). Reference-based im-
age super-resolution with deformable attention trans-
former. In Proc. European Conference on Computer
Vision (ECCV), Tel Aviv, Israel.
Cheng, R., Sun, Y., Yan, B., Tan, W., and Ma, C. (2022).
Geometry-aware reference synthesis for multi-view
image super-resolution. In Proceedings of the 30th
ACM International Conference on Multimedia, MM
’22, page 6083–6093, New York, NY, USA. Associa-
tion for Computing Machinery.
Dong, C., Loy, C. C., He, K., and Tang, X. (2014). Learn-
ing a deep convolutional network for image super-
Generative Texture Super-Resolution via Differential Rendering
287
(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 5: (a) Low-resolution texture, (c) generated high-resolution texture, (e) rendering with low-resolution texture, (g)
rendering with generated high-resolution texture. (b), (d), (f), (h) depict color-coded zoomed patches.
resolution. In European conference on computer vi-
sion. Springer.
Eisert, P., Schreer, O., Feldmann, I., Hellge, C., and Hils-
mann, A. (2022). Volumetric video - acquisition,
interaction, streaming and rendering. In Immersive
Video Technologies, pages 289–326. Academic Press.
Glasner, D., Bagon, S., and Irani, M. (2009). Super-
resolution from a single image. In 2009 IEEE 12th
International Conference on Computer Vision, pages
349–356.
Goldluecke, B. and Cremers, D. (2009). Superresolution
texture maps for multiview reconstruction. In IEEE
12th Int. Conference on Computer Vision. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proc. IEEE
Conference on computer vision and pattern recogni-
tion.
Hilsmann, A., Fechteler, P., Morgenstern, W., Paier, W.,
Feldmann, I., Schreer, O., and Eisert, P. (2020). Go-
ing beyond free viewpoint: creating animatable volu-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
288

metric video of human performances. IET Computer
Vision, 14:350–358(8).
Insafutdinov, E. and Dosovitskiy, A. (2018). Unsupervised
learning of shape and pose with differentiable point
clouds. Advances in neural information processing
systems, 31.
Johnson, J., Ravi, N., Reizenstein, J.and Novotny, D., Tul-
siani, S., Lassner, C., and Branson, S. (2020). Accel-
erating 3D deep learning with pytorch3d. SIGGRAPH
Asia.
Kato, H., Ushiku, Y., and Harada, T. (2018). Neural 3D
mesh renderer. In Proc. IEEE conference on computer
vision and pattern recognition.
Lai, W.-S., Huang, J.-B., Ahuja, N., and Yang, M.-H.
(2017). Deep laplacian pyramid networks for fast and
accurate super-resolution. In Proc. IEEE conference
on computer vision and pattern recognition.
Laine, S., Hellsten, J., Karras, T., Seol, Y., Lehtinen, J.,
and Aila, T. (2020). Modular primitives for high-
performance differentiable rendering. tog, 39(6).
Ledig, C., Theis, L., Husz
´
ar, F., Caballero, J., Cunningham,
A., Acosta, A., Aitken, A., Tejani, A., Johannes, T.,
Wang, Z., and Shi, W. (2017). Photo-realistic single
image super-resolution using a generative adversarial
network. Proc. IEEE conference on computer vision
and pattern recognition.
Li, T.-M., Aittala, M., Durand, F., and Lehtinen, J. (2018).
Differentiable monte carlo ray tracing through edge
sampling. tog, 37(6).
Li, Y., Tsiminaki, V., Timofte, R., Pollefeys, M., and Gool,
L. V. (2019). 3D appearance super-resolution with
deep learning. Proc. IEEE/CVF conference on com-
puter vision and pattern recognition.
Liu, S., Li, T., Chen, W., and Li, H. (2019). Soft rasterizer:
A differentiable renderer for image-based 3D reason-
ing. In Proc. IEEE/CVF Int. Conference on Computer
Vision.
Loper, M. M. and Black, M. J. (2014). OpenDR: An ap-
proximate differentiable renderer. European Confer-
ence on Computer Vision.
Lu, Z., Li, J., Liu, H., Huang, C., Zhang, L., and Zeng,
T. (2022). Transformer for single image super-
resolution. In Proc. IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition.
Maier, R., Kim, K., Cremers, D., Kautz, J., and Nießner, M.
(2017). Intrinsic3D: High-quality 3D reconstruction
by joint appearance and geometry optimization with
spatially-varying lighting. In Proc. IEEE Int. confer-
ence on computer vision.
Nimier-David, M., Vicini, D., Zeltner, T., and Jakob, W.
(2019). Mitsuba 2: A retargetable forward and inverse
renderer. tog, 38(6).
Paier, W., Hilsmann, A., and Eisert, P. (2023). Un-
supervised learning of style-aware facial animation
from real acting performances. Graphical Models,
129:101199.
Pesavento, M., Volino, M., and Hilton, A. (2021). Super-
resolution appearance transfer for 4d human perfor-
mancesmore realistic rendering results yet at a higher
computing cost are provided by differentiable ray trac-
ing methods . In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR) Workshops, pages 1791–1801.
Ranade, R., Liang, Y., Wang, S., Bai, D., and Lee, J. (2022).
3D texture super resolution via the rendering loss. In
IEEE Int. Conference on Acoustics, Speech and Signal
Processing (ICASSP).
Richard, A., Cherabier, I., Oswald, M. R., Tsiminaki, V.,
Pollefeys, M., and Schindler, K. (2019). Learned
multi-view texture super-resolution. Proc. Int. Con-
ference on 3D Vision (3DV).
Schreer, O., Feldmann, I., Renault, S., Zepp, M., Worchel,
M., Eisert, P., and Kauff, P. (2019). Capture and 3D
video processing of volumetric video. In Proc. Inter-
national Conference on Image Processing.
Shi, W., Caballero, J., Husz
´
ar, F., Totz, J., Aitken, A. P.,
Bishop, R., Rueckert, D., and Wang, Z. (2016). Real-
time single image and video super-resolution using an
efficient sub-pixel convolutional neural network. In
Proc. IEEE conference on computer vision and pat-
tern recognition.
Tsiminaki, V., Dong, W., Oswald, M. R., and Pollefeys, M.
(2019). Joint multi-view texture super-resolution and
intrinsic decomposition. In 30th British Machine Vi-
sion Conference (BMVC 2019).
Wang, X., Yu, K., Wu, S., Gu, J., Liu, Y., Dong, C.,
Qiao, Y., and Change Loy, C. (2018). Esrgan: En-
hanced super-resolution generative adversarial net-
works. In Proc. European conference on computer
vision (ECCV) workshops.
Wang, Z., Chen, J., and Hoi, S. C. H. (2021a). Deep learn-
ing for image super-resolution: A survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
43(10).
Wang, Z., Chen, J., and Hoi, S. C. H. (2021b). Deep learn-
ing for image super-resolution: A survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
43(10).
Yang, C.-Y., Ma, C., and Yang, M.-H. (2014). Single-image
super-resolution: A benchmark. In European confer-
ence on computer vision. Springer.
Generative Texture Super-Resolution via Differential Rendering
289
