
Evaluating Learning Potential with Internal States
in Deep Neural Networks
Shogo Takasaki and Shuichi Enokida
Graduate School of Computer Science and Systems Engineering, Kyushu Institute of Technology,
680-4 Kawazu, Iizuka-shi, Fukuoka, 820-8502, Japan
Keywords:
Deep Learning, Anticipating Accidents, Long Short-Term Memory, Evaluating Learning Potential.
Abstract:
Deploying deep learning models on small-scale computing devices necessitates considering computational
resources. However, reducing the model size to accommodate these resources often results in a trade-off
with accuracy. The iterative process of training and validating to optimize model size and accuracy can be
inefficient. A potential solution to this dilemma is the extrapolation of learning curves, which evaluates a
model’s potential based on initial learning curves. As a result, it is possible to efficiently search for a network
that achieves a balance between accuracy and model size. Nonetheless, we posit that a more effective approach
to analyzing the latent potential of training models is to focus on the internal state, rather than merely relying
on the validation scores. In this vein, we propose a module dedicated to scrutinizing the network’s internal
state, with the goal of automating the optimization of both accuracy and network size. Specifically, this paper
delves into analyzing the latent potential of the network by leveraging the internal state of the Long Short-
Term Memory (LSTM) in a traffic accident prediction network.
1 INTRODUCTION
Deep Neural Networks (DNNs) have achieved re-
markable results across various fields such as image
recognition and natural language processing in recent
years. Deploying deep learning models on automo-
biles and robots paves the way for autonomous driv-
ing and human-supporting robots. However, the con-
straint of equipping such robots with large-scale com-
puting servers makes the use of edge computing de-
vices more desirable. Nonetheless, edge computing
devices pose significant resource limitations, such as
CPU and GPU capabilities, necessitating considera-
tion of the size of the deployed deep learning mod-
els. Reducing the model size appears to be a solution,
yet it incurs a trade-off between accuracy and network
size, making it imperative to design networks that har-
monize accuracy with network size.
The most straightforward approach to optimal
network exploration involves trial and error through
repeated training and validation, but the expansive
search space due to various hyperparameter combi-
nations renders this approach inefficient. Besides, the
repetitive training and accuracy validation up to the
set epochs incur significant time and computational
resource costs. Hence, predicting the network’s fu-
ture performance early in training becomes crucial.
Learning Curve Extrapolation (LCE) (Swersky et al.,
2014; Domhan et al., 2015; Klein et al., 2017)emerges
as a method to evaluate a network’s potential early in
training. While human experts typically evaluate a
model’s potential by inspecting the learning curves,
LCE extrapolates the end of the learning curves from
the early ones to assess a model’s potential. LCE en-
ables the evaluation of a model’s potential at an early
stage, facilitating efficient training for models where
high diversity is anticipated. Lately, LCE has found
application in the realm of Neural Architecture Search
(NAS).
NAS, an AutoML (Hutter et al., 2019) tech-
nique, automates the identification of optimal neural
network architectures and has made significant im-
pacts across diverse domains like image classification
(Zoph et al., 2018; Real et al., 2019), object detec-
tion (Chen et al., 2019; Wang et al., 2020) and se-
mantic segmentation (Zhang et al., 2019; Liu et al.,
2019). Core elements of NAS encompass the search
space, search strategy, and performance estimation.
In this framework, a search strategy selects a struc-
ture A from Search Space A and assesses its per-
formance, iterating this selection and evaluation to
optimize the neural network architecture. Given the
Takasaki, S. and Enokida, S.
Evaluating Learning Potential with Internal States in Deep Neural Networks.
DOI: 10.5220/0012298500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
317-324
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
317
𝑁 − 1 th epoch
𝑁th epoch
(𝑁 + 1)th epoch
Pre-trained Sequential
Evaluation Network
network internal states
Retrain at the 𝑁th epoch
Continue this training
Retrain from the beginning
with a modified network size
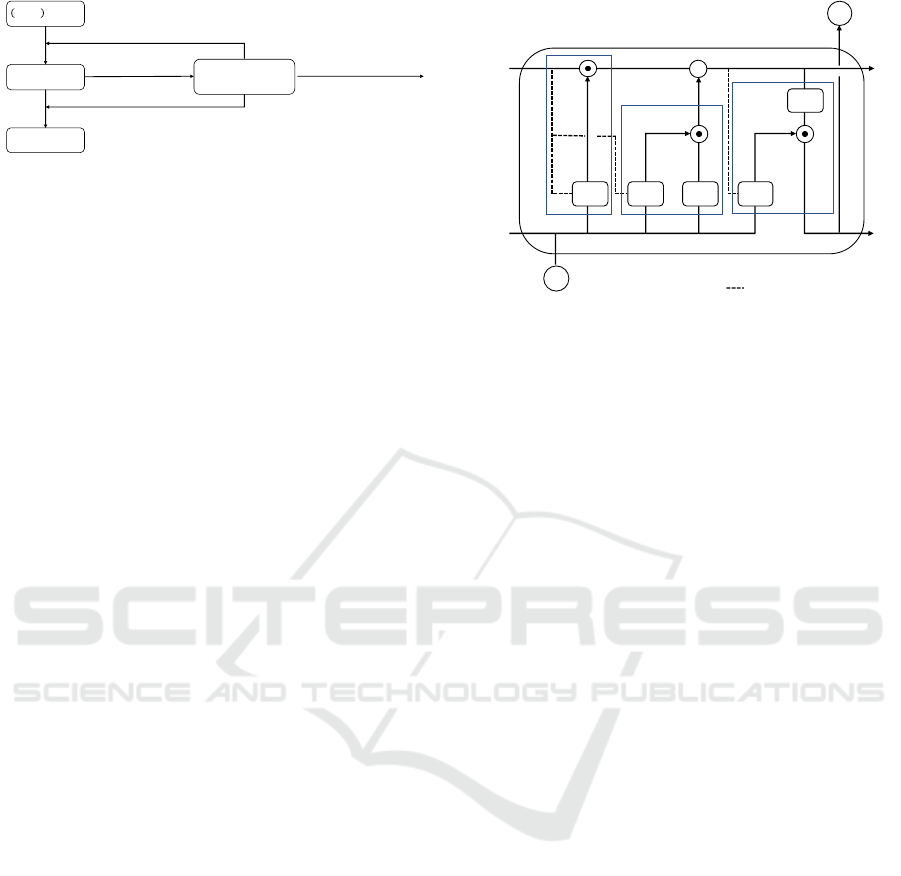
Figure 1: System overview utilizing the Sequential Evalu-
ation Network (SEN). Upon completion of training at the
N-th epoch, the internal parameters are fed into the pre-
trained SEN, which subsequently outputs one of three states
to autonomously control the training process: (i) Continue
Training: The training continues if high future accuracy is
anticipated with the current network size. (ii) Retrain the
Current Epoch: If the training results from the current epoch
adversely impact the internal state, retraining is initiated at
the same epoch. (iii) Retrain with Adjusted Network Size:
If the current network size is deemed to lack potential, the
network size is expanded, and retraining begins anew.
plethora of networks NAS evaluates, efficient perfor-
mance estimation becomes vital. LCE has emerged
as an efficient strategy for performance estimation
(Baker et al., 2018; Wistuba and Pedapati, 2019; Yan
et al., 2021). Another notable direction in NAS opti-
mizes for constraints typical of small computers, not
merely accuracy. For example, FBNet (Wu et al.,
2019) optimizes both accuracy and inference speed
on mobile devices by introducing Differentiable Neu-
ral Network Architecture Search (DNAS) which em-
ploys an Operator Latency LUT to balance accuracy
with inference speed.
As elaborated, assessing the model’s potential
early on proves beneficial for NAS tasks, emphasiz-
ing not only accuracy but also lightweightness. In
this study, we aim to construct a Sequential Evalu-
ation Network (SEN) that incrementally assesses a
model’s potential. SEN strives for balanced learn-
ing in terms of accuracy and network size by eval-
uating the model’s potential during training and au-
tonomously controlling the training process. Our ap-
proach distinctively centers on the network’s internal
state rather than on validation accuracy, akin to LCE.
We posit that by honing in on the internal state, we
can gauge the latent potential of a model, unreflected
in the network output, enabling more efficient train-
ing control. Moreover, computing validation accu-
racy every epoch using large datasets and metrics such
as Average Precision (AP) can be resource-intensive.
In contrast, SEN, bypassing validation accuracy, as-
sesses the model’s potential in a more lightweight
manner. Figure 1 illustrates the system overview us-
ing SEN. Training initiates with an extremely small
network size, expanding until SEN anticipates higher
accuracy in the future, thereby efficiently training a
model that balances accuracy and network size.
+
ℎ
!
𝑥
!
𝜌, 𝜎 ∶ activation function
: peephole connections
𝑐
!"#
ℎ
!"#
𝑓
!
𝑖
!
𝑜
!
𝑐
!
ℎ
!
forget gate
input gate
output gate
𝜎 𝜎 𝜌 𝜎
𝜌
Figure 2: Schematic of an LSTM block, illustrating data
flow through input, forget, and output gates along with the
memory cell. Equations (1)–(6) describe the interactions
and updates within the block.
In this paper, as a foundamental study for con-
structing SEN, we explore a traffic accident predic-
tion network employing onboard monocular camera
footage as our subject of investigation. One such
network is the Dynamic Spatial Attention - Recur-
rent Neural Network (DSA-RNN) (Chan et al., 2016).
DSA-RNN chiefly consists of an image feature ex-
traction component and a temporal data processing
component. Generally, CNNs used for image feature
extraction in such systems leverage pretrained mod-
els, with training commonly reserved for the temporal
data processing network. Consequently, In this study,
our aim is to optimize the accuracy and network size
of LSTM (Long Short-Term Memory) used for pro-
cessing time-series data. To achieve this, we closely
examine the internal states of the LSTM and aim to
evaluate the potential of the model during training on
a step-by-step basis.
2 RELATED WORK
2.1 LSTM
Recurrent Neural Networks (RNNs) are commonly
cited as foundamental architectures for processing
time series data. These networks possess a unique
structure characterized by self-recursive connections
across time. Specifically, the intermediate activa-
tion feature h
h
h
t−1
from a given timestep is integrated
with the input x
x
x
t
of the subsequent timestep. Al-
though RNNs are engineered to process time series
data, they suffer from the vanishing gradient prob-
lem (Pascanu et al., 2013), which hampers long-term
learning. LSTM addresses this issue by substituting
the hidden layer nodes with LSTM blocks, as illus-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
318

trated in Figure 2.
LSTM is architected around a Constant Error
Carousel (CEC, also known as a memory cell), an in-
put gate, a forget gate, and an output gate. The mem-
ory cell in an LSTM retains information over multiple
time steps. The forget gate determines the fraction of
long-term memory from the preceding time step to
retain, while the input gate decides the amount of cur-
rent input or short-term memory to store in the mem-
ory cell, effectively updating its state. The output gate
then decides how much information should be emit-
ted based on the current internal state. The output at
time t is recurrently used as input for the LSTM block
at the subsequent timestep t + 1. As illustrated in Fig-
ure 2, the input at time t is represented by x
x
x
t
, and the
output is denoted by h
h
h
t
.
Assuming the quantity of LSTM blocks is N and
the number of inputs is M, the weight, serving as the
learning parameter, is described as:
• Input weights:
W
W
W
z
, W
W
W
f
, W
W
W
i
, W
W
W
o
∈ R
N×M
• Recurrent weights:
R
R
R
z
, R
R
R
f
, R
R
R
i
, R
R
R
o
∈ R
N×N
• Peephole connection weights:
p
p
p
f
, p
p
p
i
, p
p
p
o
∈ R
N
• Bias: b
b
b
z
, b
b
b
f
, b
b
b
i
, b
b
b
o
∈ R
N
Moreover, the variables z
z
z
t
, f
f
f
t
, i
i
i
t
, o
o
o
t
, and c
c
c
t
cor-
respond to the input to the LSTM block, the forget
gate, the input gate, the output gate, and the memory
cell at time t, respectively. These are defined by the
following equations:
z
z
z
t
= ρ(W
W
W
z
x
x
x
t
+ R
R
R
z
h
h
h
t−1
+ b
b
b
z
) (1)
f
f
f
t
= σ(W
W
W
f
x
x
x
t
+ R
R
R
f
h
h
h
t−1
+ p
p
p
f
⊙ c
c
c
t−1
+ b
b
b
f
) (2)
i
i
i
t
= σ(W
W
W
i
x
x
x
t
+ R
R
R
i
h
h
h
t−1
+ p
p
p
i
⊙ c
c
c
t−1
+ b
b
b
i
) (3)
o
o
o
t
= σ(W
W
W
o
x
x
x
t
+ R
R
R
o
h
h
h
t−1
+ p
p
p
o
⊙ c
c
c
t
+ b
b
b
o
) (4)
c
c
c
t
= z
z
z
t
⊙ i
i
i
t
+ c
c
c
t−1
⊙ f
f
f
t
(5)
h
h
h
t
= ρ(c
c
c
t
) ⊙ o
o
o
t
(6)
In these equations, ⊙ symbolizes the Hadamard
product. Typically, the sigmoid function (σ(x) =
1/(1 + e
−x
)) serves as the activation function for the
gates, while the hyperbolic tangent function is utilized
for both input and output activations.
Due to the incorporation of memory cells and di-
verse gates, LSTM can process extensive time se-
ries data more effectively than conventional RNNs.
Hence, in recent times, deep learning techniques for
time series data processing have found applications
in various sectors, such as video and motion picture
analysis, linguistic processing, and audio processing.
In the analysis of LSTM’s internal parameters (Gr-
eff et al., 2017), the impact on performance when cer-
tain parameters are omitted is discussed. Notably, the
performance degradation is substantial when remov-
ing the forget gate and the activation function of the
output. This indicates that within the LSTM, the for-
get gate and the output’s activation function play cru-
cial roles. A visualization study of the LSTM (Karpa-
thy et al., 2016) examined each LSTM cell’s opera-
tion. It has been mentioned that LSTM cells, existing
in multiple within the hidden layers, have variations
in their behaviors. In particular, when focusing on
the values of the forget gate, it has been reported that
there are cells that operate to retain memory over a
long period of time. However, some cells are not eas-
ily interpretable. Therefore, we assume that models
with a higher proportion of highly active cells amidst
a mixture of highly and less active cells in the hid-
den layer have potential for the future. We define the
activity level of LSTM cells using the value of the
forget gate, which has been reported to particularly
contribute to accuracy.
2.2 Traffic Accident Prediction Using
DSA-RNN
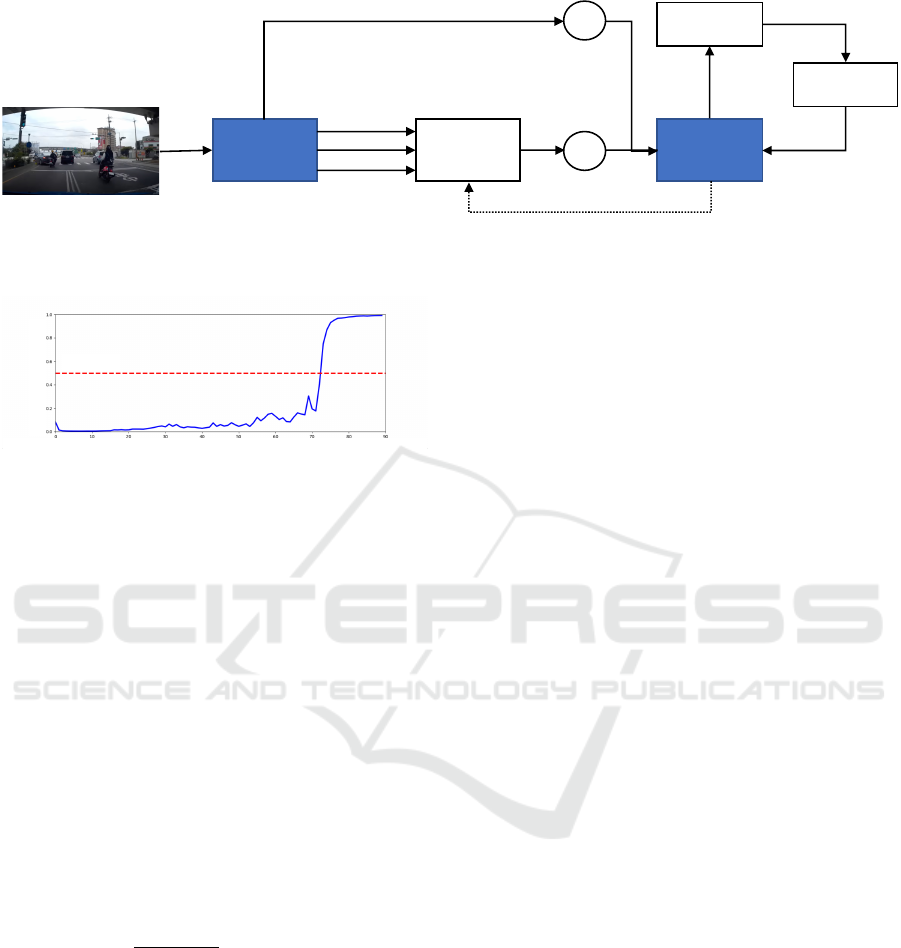
Figure 3 presents the model visualization of DSA-
RNN, which is designed to predict traffic accidents
using an LSTM based on information acquired from
an onboard monocular camera. The input to the DSA-
RNN at time t is a frame image whose features x
x
x
F
t
are
generated by passing the frame through a CNN. Al-
though these frame features capture the overall char-
acteristics of the image, they might not effectively
capture the details of objects, such as four-wheeled
or two-wheeled vehicles, appearing only in parts of
the image.
In order to address this limitation, the Dynamic
Spatial Attention (DSA) mechanism is proposed to
extract object features x
x
x
D
t
focused on potentially haz-
ardous objects within the image. By providing the
LSTM with both the object features x
x
x
D
t
extracted by
the DSA and the frame features x
x
x
F
t
, the surrounding
environment is considered during traffic accident pre-
diction.
The features of each potentially hazardous object
detected by Faster R-CNN (Ren et al., 2015) are rep-
resented as
ˆ
x
x
x
j
t
, and the importance of each hazardous
object is given by α
j
t
. Here, J denotes the number
of potentially hazardous objects, with j indexing each
object from 1 to J. The object features x
x
x
D
t
obtained by
the DSA are computed as in Equation (7), where the
importance of each object α
j
t
is computed according
Evaluating Learning Potential with Internal States in Deep Neural Networks
319
!!𝒙
!
"
!!𝒙
!
#
𝑿
!
𝒉
!"#
Figure 3: Architecture of the DSA-RNN model, integrating frame features, x
x
x
F
t
, and dynamically-attended object features, x
x
x
D
t
,
for traffic accident prediction using the LSTM and onboard monocular camera inputs.
Time step
Probability of accident
Threshold
Figure 4: Temporal evolution of the DSA-RNN’s pre-
dicted accident probability (solid blue line) across sequen-
tial frames, triggering an accident prediction when exceed-
ing a predefined threshold (red dashed line).
to Equation (8). In Equation (8), the term e
j
t
is calcu-
lated as shown in Equation (9). In this formulation, w
w
w,
W
W
W
e
, U
U
U
e
, and b
b
b
e
are training parameters, and h
h
h
t−1
rep-
resents the activation feature of the LSTM from the
preceding time step.
As shown in Figure 4, the network computes the
probability of an accident at each time step. When
the accident probability, represented by the solid blue
line, surpasses the threshold indicated by the red
dashed line, a traffic accident is predicted to occur in
that scene.
x
x
x
D
t
= DSA(X
X
X
t
,α
α
α
t
) =
J
∑
j=1
α
j
t
ˆ
x
x
x
j
t
(7)
α
j
t
=
exp(e
j
t
)
∑
j
exp(e
j
t
)
(8)
e
j
t
= w
w
w
T
ρ(W
W
W
e
h
h
h
t−1
+U
U
U
e
ˆ
x
x
x
j
t
+ b
b
b
e
) (9)
3 PROPOSED METHOD
We assume that within the hidden layers where mul-
tiple LSTM cells exist, there is a mix of cells with
high and low activity levels, and the higher the pro-
portion of highly active cells, the more promising the
model is. Therefore, we focus on the values of the
LSTM’s forget gate to define the activity level of the
LSTM cells. Moreover, based on the aforementioned
assumption, we define an overall activity level met-
ric for the LSTM. This metric aggregates the activity
level information across all LSTM cells and serves as
an indicator of the model’s potential. A mathematical
formulation of the activity level metric, based on the
forget gate values, could provide a quantifiable mea-
sure of the model’s potential, enabling more objective
evaluations and comparisons.
3.1 Definition of Highly Active LSTM
Cells
The LSTM uses a forget gate to regulate the degree
of memory retention from the previous time step. At
time t, the forget gate f
f
f
t
is an N-dimensional vec-
tor, where N denotes the number of nodes in the hid-
den layer, represented as f
f
f
t
= ( f
1
t
f
2
t
.. . f
N
t
)
T
. As
indicated in Equation (5), if the value of the forget
gate f
k
t
(k ∈ 1,...,N) is 1, the memory is entirely re-
tained. Conversely, a value of 0 leads to complete
memory forgetting. With appropriate timing of its for-
getting mechanism, the LSTM can process consider-
ably longer sequences compared to RNN and effec-
tively handle changes in conditions. In accident pre-
diction scenarios, a rapid decrease in the forget gate
value might signify a transition from a safe to a haz-
ardous situation. This allows the LSTM to integrate
information in dangerous scenarios more effectively.
Considering the operation of the forget gate, we dis-
cuss three types, as represented in Figures 5a to 5c.
In these figures, the red solid line depicts the aver-
age transition of the forget gate value f
f
f
t
for all cells,
and the green solid line illustrates the transition of
the forget gate value f
k
t
for a specific cell. Figure
5a showcases a cell that maintains memory by persis-
tently transitioning at values near its maximum. Fig-
ure 5b represents a cell mirroring the average transi-
tion of the forget gate value. Figure 5c typifies a cell
with significant fluctuations, differing from the mean
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
320

0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 10 20 30 40 50 60 70 80 90
Forget gate activation
Time step
(a) Persistent Memory Retention
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 10 20 30 40 50 60 70 80 90
Forget gate activation
Time step
(b) Average Transition
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 10 20 30 40 50 60 70 80 90
Forget gate activation
Time step
(c) Notable Fluctuations
Figure 5: Transitions of forget gate values of LSTM cells
demonstrating different behaviors: (a) Persistent mem-
ory retention, (b) Typical average transition, and (c) No-
table fluctuations representing responsiveness to situational
changes. Red and green lines depict average and specific
cell forget gate values, respectively.
transition. LSTM cells with pronounced fluctuations,
such as those shown in Figure 5c, indicate their re-
sponsiveness to sudden situational changes.
Here, based on the magnitude of local variations
in the values of the forget gate, we define the LSTM
Cell Activity Level (LCAL). The LCAL of the LSTM
cell k is defined in Equation (10). In the equation,
CV
k
(t) is the coefficient of variation of the values of
the forget gate, as shown in Equation (11). The coef-
ficient of variation is calculated for each moving av-
erage of window size w, as shown in Equation (12).
When evaluating the variability of the forget gate’s
values solely by the standard deviation, it is believed
that there would be little difference in the variability
across windows. Therefore, by using the mean value,
which is less than 1, to subtract from the standard de-
LCAL
The number of LSTM cells
Figure 6: Histogram of LCAL across all LSTM cells for
TrueP scenes. LCAL values are calculated for each of
the N · TP patterns arising from N hidden layers and TP
TrueP scenes, revealing the distribution of activity levels
within the network during accurate accident prediction. The
LSTM Activity Level (LAL) is subsequently derived from
these distributions, offering insight into the potential of the
model based on the prevalence of high-activity LSTM cells.
viation, a form of weighting is applied, making the
differences in variability more pronounced. Further-
more, by calculating the variation using moving aver-
ages, we derive the local variation amount of the val-
ues of the forget gate, and define its maximum value
as LCAL.
LCAL
k
= max
t
CV
k
(t) (10)
CV
k
(t) =
q
1
w
∑
t+w−1
i=t
( f
k
i
− MA
k
(t)))
2
MA(t)
(11)
MA
k
(t) =
1
w
t+w−1
∑
i=t
f
k
i
(12)
3.2 Definition of the Overall Activity
Level of LSTM
We assume that the higher the proportion of LSTM
cells with a large LCAL when viewed across the en-
tire hidden layer, the more potential the model has.
Based on this assumption, we define the LSTM Activ-
ity Level (LAL). In the context of traffic accident pre-
diction, we consider the scenes where the forget gate
value is most activated to be the scenes where acci-
dents are correctly predicted when they occur, and we
denote such scenes as TrueP. We calculate the LCAL
for all scenes that are TrueP. At this time, if we denote
the total number of TrueP scenes as TP, then there ex-
ist TP states of hidden layers. In other words, if we
denote the number of hidden layers as N, N · TP pat-
terns of LCAL are calculated. These LCALs are rep-
resented in a single histogram, as shown in Figure 6.
Evaluating Learning Potential with Internal States in Deep Neural Networks
321

As shown in Figure 5a, the LCAL value of the cell is
close to 0. Given this, we expect the LCAL histogram
to be concentrated around the value of 0. Therefore,
as shown in Equation (13), we define LAL as the pro-
portion of LSTM cells with an LCAL greater than a
threshold τ
LAL
. Here, the function I(·) acts as an indi-
cator function, returning 1 if the condition is met and
0 otherwise.
LAL =
1
N · TP
N
∑
k=1
TP
∑
TrueP=1
I(LCAL
TrueP
k
≥ τ
LAL
)
(13)
4 EXPERIMENT
4.1 Experiment Details
In this section, we provide a detailed description
of the preliminary experiments aimed at construct-
ing SEN for traffic accident prediction. For this ex-
periment, we utilized the Dashcam Accident Dataset
(DAD) (Chan et al., 2016) and trained it for 30
epochs. Herein, we denote the models with hidden
layer sizes set to 128, 512, 1024, and 2048 as M
128
,
M
512
, M
1024
, and M
2048
, respectively. As LSTM’s in-
ternal states change with each training iteration, we
trained the M
128
, M
512
, M
1024
, and M
2048
models ten
times each. Subsequently, we conducted preliminary
experiments on these trained models using the ana-
lytical methods described in Section 3. The experi-
ments were conducted using TensorFlow on a server
equipped with an NVIDIA RTX A6000 GPU.
4.1.1 Details of the Dashcam Accident Dataset
The DAD consists of dashcam footage capturing ve-
hicular and motorcycle accidents shot in Taiwan.
Each video clip is recorded at 20fps, spanning 100
frames, or a total duration of 5 seconds. For clips con-
taining accidents, the actual accident event is captured
between the 90th and 100th frames. As a result, the
90 frames leading up to the accident are used to pre-
dict its occurrence. For this experiment, the dataset
comprises a total of 620 videos with accidents (455
for training and 165 for validation) and 1,130 videos
without accidents (829 for training and 301 for vali-
dation).
4.1.2 Evaluation Metrics
For evaluating the activity level of LSTM cells, we
use the LCAL set with a window size w = 5. In the
DAD dataset, as the last 10 frames of the accident-
inclusive videos contain the actual accident, the in-
terval (90, 100] is excluded from evaluation. Addi-
tionally, due to the network output’s instability in the
initial frames, the interval [1, 10) is also excluded.
Therefore, the LCAL is calculated using the moving
average in the interval [10,90]. Moreover, as an in-
dicator of the model’s potential, we use LAL with a
threshold τ
LAL
= 0.05.
For assessing the accuracy of traffic accident pre-
diction, we use Average Precision (AP). In scenes
containing an accident, the number of scenes cor-
rectly predicted to have an accident is termed True
Positive (TP), while the number of scenes mistakenly
predicted as non-accidental is labeled False Negative
(FN). Conversely, in non-accident scenes, scenes in-
correctly predicted to have an accident are designated
as False Positive (FP), and those accurately predicted
without an accident are labeled True Negative (TN).
Using these metrics, Recall and Precision are com-
puted for each accident threshold to derive the AP.
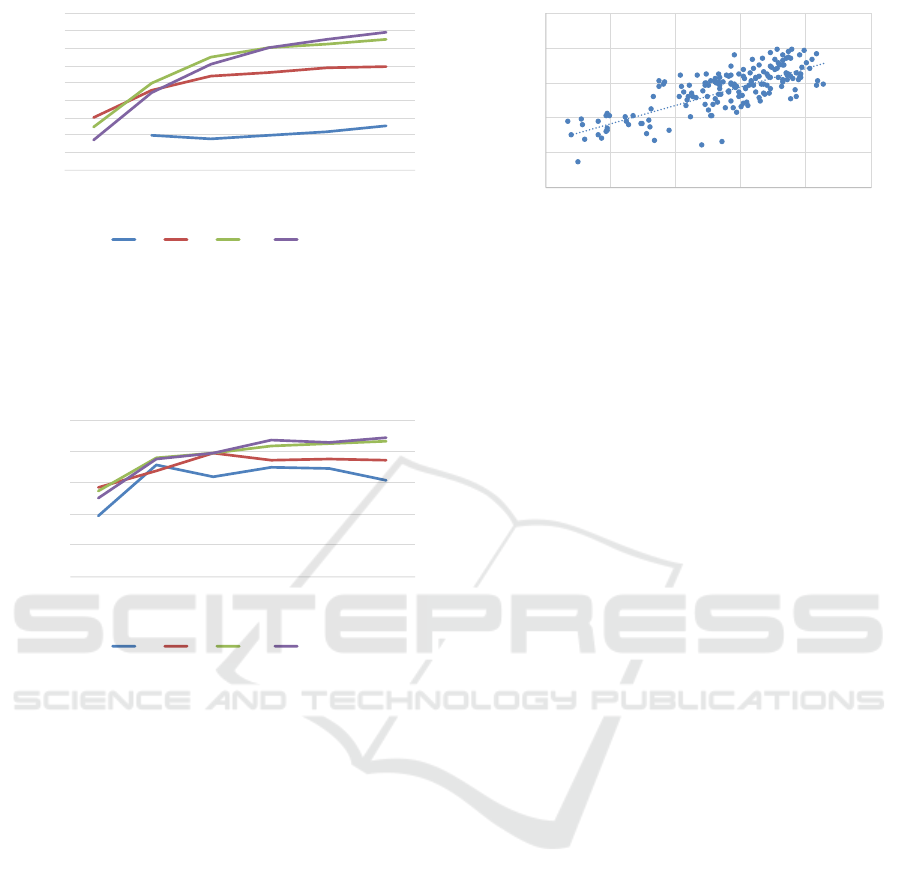
4.2 Results
4.2.1 Transition of LSTM Activity Levels
For the models M
128
, M
512
, M
1024
, and M
2048
trained
10 times each, we calculated LAL and AP at epochs
5, 10, 15, 20, 25, and 30. We then recorded the tran-
sition of the average LAL and AP over the epochs
for each model. Notably, for some epochs of M
128
and M
512
(primarily at epoch 5), there were no scenes
with TrueP, making it impossible to compute LAL.
Hence, we plotted the average of the available LAL
data. The transitions of LAL and AP are depicted in
Figures 7 and 8, respectively.
When focusing on the AP of M
128
, it is evident
that the training was not very effective, registering the
lowest value at epoch 30. On the other hand, by ex-
amining the LAL, its value was comparable to other
models during the early training phases. However, as
training progressed, there was minimal growth, set-
ting at a lowest value by epoch 30. The fluctuations in
AP suggest that the number of LSTM cells may be in-
sufficient, indicating that the hidden layer size might
be inadequate for retaining essential information for
traffic accident predictions. Especially when consid-
ering the LAL outcomes, we deduce that the model
might not achieve higher accuracy moving forward,
as the number of ”active” cells, anticipated to increase
with more epochs, remains stagnant. A similar trend
is visible with the results for M
512
. In terms of AP,
compared to the outcomes of M
1024
and M
2048
, it is
clear that the training was less effective. Likewise,
concerning LAL, its growth rate is slower, settling at
a lower value by epoch 30. From the above, it can
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
322
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
5 10 15 20 25 30
LAL
epoch
128 512 1024 2048
Figure 7: Epoch-wise Transition of LSTM Activity Levels
(LAL) for Models M
128
, M
512
, M
1024
, and M
2048
. The plot
illustrates the progression and potential stability of LAL
across different model complexities and provides insights
into the effective hidden layer size during the training for
accident prediction.
0.5
0.55
0.6
0.65
0.7
0.75
5 10 15 20 25 30
AP
epoch
128 512 1024 2048
Figure 8: Epoch-wise Transition of Average Precision (AP)
for Models M
128
, M
512
, M
1024
, and M
2048
. The graph
demonstrates the predictive performance of each model
over the epochs and aids in understanding the model’s effi-
ciency in predicting traffic accidents throughout the training
process.
be inferred that for models with a hidden layer size
of 128 and 512, the potential is not promising, thus in
SEN, we believe that increasing the size of the hidden
layer and retraining is effective.
Additionally, analyzing the results for M
1024
and
M
2048
, both AP and LAL appear to be nearly iden-
tical. This observation leads us to conclude that aug-
menting the number of LSTM cells beyond this might
only result in convergence to similar values, aiding in
determining the optimal LSTM cells count. In other
words, we consider it effective to continue training
with the current parameters in SEN.
In summation, the observed relationship between
the increase in LAL and AP values during training in-
dicates that by monitoring changes in LAL values, we
can discern whether to prolong training or if the cur-
rent hidden layer size is promising for future accuracy
enhancements.
0.55
0.6
0.65
0.7
0.75
0.8
0 0.2 0.4 0.6 0.8 1
AP
LAL
Figure 9: Correlation Analysis between LSTM Activity
Levels (LAL) and Average Precision (AP). The scatter plot
represents models M
512
, M
1024
, and M
2048
, each at epochs
5, 10, 15, 20, 25, and 30, suggesting a significant positive
correlation (0.767) that implies the potentiality of LAL as a
predictive indicator of model accuracy in future epochs.
4.2.2 Correlation Between LSTM Activity
Levels and Accuracy
We investigated the correlation between LAL and AP
for the models M
512
, M
1024
, and M
2048
. We excluded
M
128
due to its notably low LAL. Data was plotted
for LAL and AP at epochs 5, 10, 15, 20, 25, and 30,
for each model trained 10 times. The results are de-
picted in Figure 9. A correlation coefficient of 0.767
indicates a significant positive relationship. From the
foregoing, we believe that by extrapolating the LAL
in the early stages of training, it is possible to predict
future accuracy.
However, there currently remains a challenge re-
garding the computational cost of LAL. The distinct
aspect of the intended SEN from existing methods
is that, unlike the time-consuming validation accu-
racy calculated per epoch with a large amount of data
using AP or other evaluation methods, it employs
a lightweight evaluation metric using internal states.
Therefore, it’s necessary to keep the computation cost
of LAL low. The high computation cost stems from
the fact that the validation data used for calculating
AP is also employed to extract the scenes for TrueP,
which is used in the calculation of LAL. It is sufficient
to use only the data containing accidents to extract the
scenes for TrueP. Additionally, since the LCAL his-
togram is created by integrating histograms of sim-
ilar trends obtained for each scene being TrueP, we
believe that a lesser total number of TrueP is accept-
able. Hence, there is a need to experiment whether
a positive correlation between LAL and accuracy can
be obtained using validation data constituted only of
a small number of accident-inclusive videos for the
computation of LAL.
Evaluating Learning Potential with Internal States in Deep Neural Networks
323

5 CONCLUSION
This study aims at efficient learning of models that
balance accuracy and network scale as its goal. We
are also targeting the construction of SEN, which
evaluates the potential of a model utilizing the inter-
nal states of the network. In this paper, we focused on
the LSTM in the traffic accident prediction network
and defined the activity level of LSTM cells based on
the variation in the values of the forget gate. More-
over, we assumed that a model has more potential if
the proportion of high-activity LSTM cells is higher,
and hence defined LAL. By checking the transition of
LAL and AP, we demonstrated that the value of LAL
is effective for controlling SEN. Additionally, since a
positive correlation between LAL and AP was con-
firmed, we believed that it’s possible to predict future
accuracy by extrapolating LAL in the early stages of
training.
In our future research, firstly, we plan to create a
small validation data set for the calculation of LAL
and experiment on the effectiveness of LAL calcu-
lated at a low cost. Then, we will proceed to discuss
the specific methods of extrapolating LAL.
REFERENCES
Baker, B., Gupta, O., Raskar, R., and Naik, N. (2018).
Accelerating neural architecture search using perfor-
mance prediction. In International Conference on
Learning Representations.
Chan, F. H., Chen, Y. T., Xiang, Y., and Sun, M. (2016).
Anticipating accidents in dashcam videos. In Asian
Conference on Computer Vision, pages 136–153.
Chen, Y., Yang, T., Zhang, X., Meng, G., Xiao, X., and
Sun, J. (2019). Detnas: Backbone search for object
detection. In International Conference on Neural In-
formation Processing Systems.
Domhan, T., Springenberg, J. T., and Hutter, F. (2015).
Speeding up automatic hyperparameter optimization
of deep neural networks by extrapolation of learning
curves. In International Joint Conference on Artificial
Intelligence, pages 3460–3468.
Greff, K., Srivastava, R. K., Koutnık, J., Steunebrink, B. R.,
and Schmidhuber, J. (2017). Lstm: A search space
odyssey. IEEE Transactions on Neural Networks and
Learning Systems, pages 2222–2232.
Hutter, F., Kotthoff, L., and Vanschoren, J., editors (2019).
Automatic Machine Learning: Methods, Systems,
Challenges. Springer. In press, available at http:
//automl.org/book.
Karpathy, A., Johnson, J., and Fei-Fei, L. (2016). Visualiz-
ing and understanding recurrent networks. In Interna-
tional Conference on Learning Representations.
Klein, A., Falkner, S., Springenberg, J. T., and Hutter, F.
(2017). Learning curve prediction with bayesian neu-
ral networks. In International Conference on Learn-
ing Representations.
Liu, C., Chen, L.-C., Schroff, F., Adam, H., Hua, W., Yuille,
A., and Fei-Fei, L. (2019). Auto-deeplab: Hierarchi-
cal neural architecture search for semantic image seg-
mentation. In IEEE / CVF Computer Vision and Pat-
tern Recognition Conference.
Pascanu, R., Mikolov, T., and Bengio, Y. (2013). On the
difficulty of training recurrent neural networks. In In-
ternational Conference on Machine Learning, pages
1310–1318.
Real, E., Aggarwal, A., Huang, Y., and Le, Q. V. (2019).
Regularized evolution for image classifier architecture
search. In AAAI Conference on Artificial Intelligence.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In IEEE / CVF Computer Vision
and Pattern Recognition Conference.
Swersky, K., Snoek, J., and Adams, R. P. (2014). Freeze-
thaw bayesian optimization. arXiv:1406.3896.
Wang, N., Gao, Y., Chen, H., Wang, P., Tian, Z., Shen, C.,
and Zhang, Y. (2020). Nas-fcos: Fast neural architec-
ture search for object detection. In IEEE / CVF Com-
puter Vision and Pattern Recognition Conference.
Wistuba, M. and Pedapati, T. (2019). Inductive transfer for
neural architecture optimization. arXiv:1903.03536.
Wu, B., Dai, X., Zhang, P., Wang, Y., Sun, F., Wu, Y., Tian,
Y., Vajda, P., Jia, Y., and Keutzer, K. (2019). Fbnet:
Hardware-aware efficient convnet design via differen-
tiable neural architecture search. In IEEE / CVF Com-
puter Vision and Pattern Recognition Conference.
Yan, S., White, C., Savani, Y., and Hutter, F. (2021).
Nas-bench-x11 and the power of learning curves.
arXiv:2111.03602.
Zhang, Y., Qiu, Z., Liu, J., Yao, T., Liu, D., and Mei, T.
(2019). Customizable architecture search for semantic
segmentation. In IEEE / CVF Computer Vision and
Pattern Recognition Conference.
Zoph, B., Vasudevan, V., Shlens, J., and Le, Q. V. (2018).
Learning transferable architectures for scalable image
recognition. In IEEE / CVF Computer Vision and Pat-
tern Recognition Conference.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
324
