Classification of Towels in a Robotic Workcell Using Deep Neural
Networks
Jens Møller Rossen
1
, Patrick Søgaard Terp
1
, Norbert Kr
¨
uger
1 a
, Laus Skovg
˚
ard Bigum
2
and Tudor Morar
2
1
Maersk Mc-Kinney Moller Institute (MMMI), University of Southern Denmark (SDU),
Campusvej, Odense, Denmark
2
Inwatec, Odense, Denmark
Keywords:
Image Classification, AI, Deep Neural Networks, Towels, Laundry Industry.
Abstract:
The industrial laundry industry is becoming increasingly more automated. Inwatec, a company specializing
in this field, is developing a new robot (BLIZZ) to automate the process of grasping individual clean towels
from a pile, and hand them over to an external folding machine. However, to ensure that towels are folded
consistently, information about the type and faces of the towels is required. This paper presents a proof of
concept for a towel type and towel face classification system integrated in BLIZZ. These two classification
problems are solved by means of a Deep Neural Network (DNN).
The performance of the proposed DNN on each of the two classification problems is presented, along with
the performance of it solving both classification problems at the same time. It is concluded that the proposed
network achieves classification accuracies of 94.48%, 97.71% and 98.52% on the face classification problem
for three different towel types with non-identical faces. On the type classification problem, it achieves an
accuracy of 99.10% on the full dataset. Additionally, it is concluded that the system achieves an accuracy of
96.96% when simultaneously classifying the type and face of a towel on the full dataset.
1 INTRODUCTION
Industrial laundries use many different processes
when handling garments, e.g. washing, sorting and
folding. Some of these processes have been auto-
mated, however others are still mainly manually pro-
cessed. One such process is the feeding of towels to
folding machines. While towel folding machines have
been around for some time, automating the feeding of
these machines still poses problems.
The problem itself is complex, since towels are
non-rigid objects which requires complicated auto-
matic manipulation. Furthermore, obtaining informa-
tion about the type of towel being fed to the folding
machine is critical, since the folding processes for dif-
ferent towel types may differ from one another de-
pending on towel size, material and appearance (col-
ors, patterns, logos). In particular, obtaining informa-
tion about the appearance of towel types is critical to
ensure consistent folding. This is because differences
a
https://orcid.org/0000-0002-3931-116X
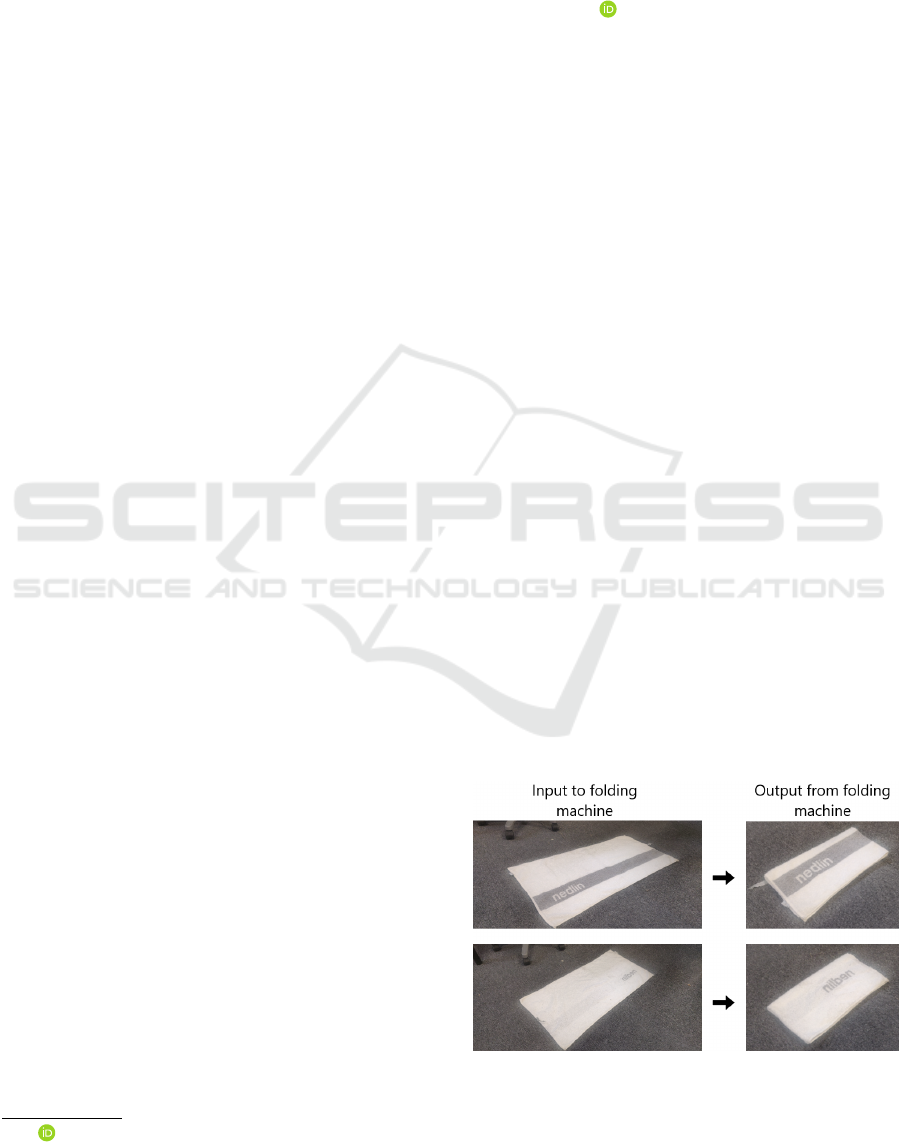
in the appearance of the two faces of a towel causes
different configurations after folding, as is illustrated
in figure 1.
There already exists some robots that can au-
tomate the feeding of towels to folding machines
(Sewts, 2023), however these robots lack the ability
Figure 1: Illustration of how the result of the folding process
of one type of towel is affected by which face of the towel is
facing up on the conveyor when fed to the folding machine.
Rossen, J., Terp, P., Krüger, N., Bigum, L. and Morar, T.
Classification of Towels in a Robotic Workcell Using Deep Neural Networks.
DOI: 10.5220/0012297500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
309-316
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
309

Figure 2: Illustration of how BLIZZ processes towels such that it can feed them to a folding machine. The illustrated process
is divided into three steps. A descriptive text is found above each of the three steps.
to estimate the type and face of the towels they pro-
cess which limits their functionality.
Likewise, the company Inwatec (Inwatec, 2023a)
is developing a new robot named BLIZZ to solve this
problem. It separates a towel from a pile of towels
containing multiple different types, and subsequently
feeds it to a folding machine. A simplified version of
how it achieves this is illustrated in figure 2. How-
ever, like the aforementioned robots, it too cannot ef-
fectively determine what type of towel it is currently
processing. This is referred to as the type classifica-
tion problem. Furthermore, it cannot determine which
face is the front and which is the back of a towel type,
in the case that the two faces are different. This is
referred to as the face classification problem.
In this work, we extend the functionality of
BLIZZ through a computer vision based approach,
such that it can solve both the type and face classifi-
cation problems. The approach is split into two parts:
1) Designing a pipeline for collecting, processing
and labeling images of towels.
2) Developing a DNN architecture that can classify
the type of towel BLIZZ is currently processing,
and — in case that the faces of the towel are dif-
ferent — classify which face of the towel is the
front and which is the back.
2 STATE OF THE ART
Working with image classification typically involves
both processing of images and designing, training and
testing an AI network. Therefore, approaches in these
two fields will be presented focusing on the problem
of segmentation and classification of towels.
2.1 Image Processing
In the context of this paper, the processing of images
concerns segmenting the towel from the rest of the
image, i.e. the background. This process is generally
known as image segmentation and is split into two
main categories (Yu et al., 2023): Those that utilize
classical segmentation methods and those that utilize
Deep Learning (DL).
In (Maitin-Shepard et al., 2010), a classical seg-
mentation method is used in a robot developed to fold
towels. Images from two cameras are used to find
corresponding depth-discontinuities along a towels
edges after picking it up, thus allowing computation
of grasping points. A foreground-background seg-
mentation method is used to segment the towel, uti-
lizing generated high precision background images.
In (Paulauskaite-Taraseviciene et al., 2022), a so-
lution is presented to extract dimensions of garments
like the size. They utilize the U-Net Convolutional
Neural Network (CNN) architecture (Ronneberger
et al., 2015) as a backbone to generate the masks used
for segmentation.
Inwatec currently utilizes a classical foreground-
background segmentation in BLIZZ similar to
(Maitin-Shepard et al., 2010) to segment the towel
from the background in multiple stages of towel pro-
cessing. In this paper, a similar algorithm is used, but
additional steps has been added.
2.2 Image Classification
For the problem of image classification, different
learning methods have been applied. Since 2010
DNNs have become particularly popular for use in
image classification problems, with the CNN archi-
tecture being especially efficient.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
310

A CNN is used in (Gabas et al., 2016) to deter-
mine which of five possible classes a garment belongs
to, which uses multiple depth images of the garment
taken from different angles. The algorithm was tested
on a dataset consisting of 4272 depth images. They
used this dataset to train their own CNN network ar-
chitecture. An average classification rate of 83% was
achieved when classifying garments using only a sin-
gle depth image, which increased to 92% when con-
sidering all images.
Inwatec currently utilize DNNs in their robots to
solve image classification problems. In a master the-
sis written in collaboration with Inwatec (Lyngbye
and Jakobsgaard, 2021), different CNN backbones
were tested in combination with a custom fully con-
nected top layer to classify different types of garments
being separated by Inwatecs THOR robot garment
separator (Inwatec, 2023b). The thesis achieved a
classification accuracy of 97% on a dataset consisting
of 17 different classes using ResNet (He et al., 2015)
as a CNN backbone.
3 METHODS
This section presents the methods that have been de-
veloped to classify the type and face of towels pro-
cessed by BLIZZ. The methods are split into two sec-
tions. The first section presents the designed image
collection and processing pipeline, while the second
section presents the developed DNN architecture used
for image classification.
3.1 Image Collection and Processing
To extract as much information as possible from a
towel, it is desired to obtain two images, one of each
face of the towel. To facilitate this, two stereo cam-
eras (Intel D435) were installed in BLIZZ. Images of
faces of a towel must be taken before BLIZZ has fin-
ished processing the towel, such that it can utilize the
classifications output by the image classifier to manip-
ulate the towel correctly. This, along with hardware
constraints, meant that it was not possible obtain com-
plete images of both faces of towels. Instead, it was
only possible to obtain two images, each one covering
most of one face of the towel. An example of images
captured by the two cameras can be seen in figure 3.
In order for the image classifier to achieve the
highest possible classification accuracy, it is desired
to remove the parts in both images in figure 3 that are
not a part of the towel. This is done in a three stage
process, which is shown in figure 4, where it is ap-
plied to the image shown in figure 3a.
(a) From ’Corner’ camera.
(b) From ’Rear’ camera.
Figure 3: Example of two captured images of a towel. Res-
olution of images is 1920 by 1080 pixels.
The first stage involves cropping the image ac-
cording to a Region Of Interest (ROI), which is based
on physical constraints of BLIZZ and size constraints
of towels. The results of this stage are shown in the
image in figure 4a.
The second stage involves segmenting the towel
from the background in the image shown in figure 4a.
This process is shown in figures 5a, 5b and 5c, with
the result shown in figure 4b. The segmentation is
performed by utilizing the depth image from the cam-
era, where each pixel in the depth image contains the
(a) Stage I.
(b) Stage II.
(c) Stage III.
Figure 4: The results of each of the three stages in the image
processing, applied to the image in figure 3a.
Classification of Towels in a Robotic Workcell Using Deep Neural Networks
311

z-component of the Euclidian distance from the cam-
era sensor to the object located at the pixel. An abso-
lute difference is computed between the depth value
at a given pixel and the depth value at the correspond-
ing pixel in the background image, i.e., a depth im-
age without a towel present. This absolute difference
is computed for all pixels in the depth image, where
each of the differences greater than a specified thresh-
old is determined to belong to the towel, which yields
a binary mask that is shown in figure 5a. To eliminate
noise in the binary mask, only the largest contour is
retained, which is shown in figure 5b. The edge of
this contour is visualized as a red line in figure 5c.
(a) Initial segmentation mask.
(b) After size filtration.
(c) After applying Sobel gradients.
(d) Calculated cropping lines.
Figure 5: Figures providing a detailed view of the process
of towel segmentation (stage II) and cropping of the seg-
mented image (stage III) as shown in figure 4.
Improving this segmentation is achieved by us-
ing Sobel gradients (Dawson-Howe, 2014). For each
point in the contour, a line is fit to set of points. This
set includes the point itself, along with the five pre-
ceding and proceeding contour points. Sobel gradi-
ents are then calculated along the normal of this line
for a predefined length. The point is then moved to
the position of the pixel that contains the highest So-
bel gradient, since this is theorized to be be the actual
edge of the towel. The final contour can be seen in
figure 5c, represented by the green line.
The third stage involves cropping the segmented
image shown in figure 4b to the smallest bound-
ing box that encompasses the towel. The lines that
are used for cropping are shown in figure 5d, with
the result of the cropping being shown in figure 4c.
The cropping is performed using three cropping lines,
which are calculated by two different methods. The
first method computes two of the cropping lines us-
ing the image shown in figure 4b. The first of these
is a vertical line, which is goes through the non-
zero pixel(s) with the highest x-value, while the sec-
ond line is horizontal, and goes through the non-zero
pixel(s) with the highest y-value. These cropping
lines are visualized as the blue and red lines in fig-
ure 5d, respectively. The second method, which re-
moves the gripper, also uses the image shown in figure
4b and is based on the position of the linear actuator
grasping the towel. This method utilizes an estimated
encoder to image mapping to calculate the cropping
line visualised as a green line in figure 5d. All three
of these cropping lines are then simultaneously ap-
plied to the image shown in figure 4b, which yields
the image shown in figure 4c.
After images from both cameras, as shown in fig-
ure 3, have been segmented and cropped in the three
stages process illustrated in figure 4, they must be
further processed before they are usable to the im-
age classifier. This involves scaling the images to
500 × 500 pixels before concatenating them along the
horizontal axis. This yields an image as shown in fig-
ure 6.
Figure 6: Example of an image of a towel after processing
is finished. The towel in the image is of the type ’Nedlin’,
and is labelled as ’NedlinFront’.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
312
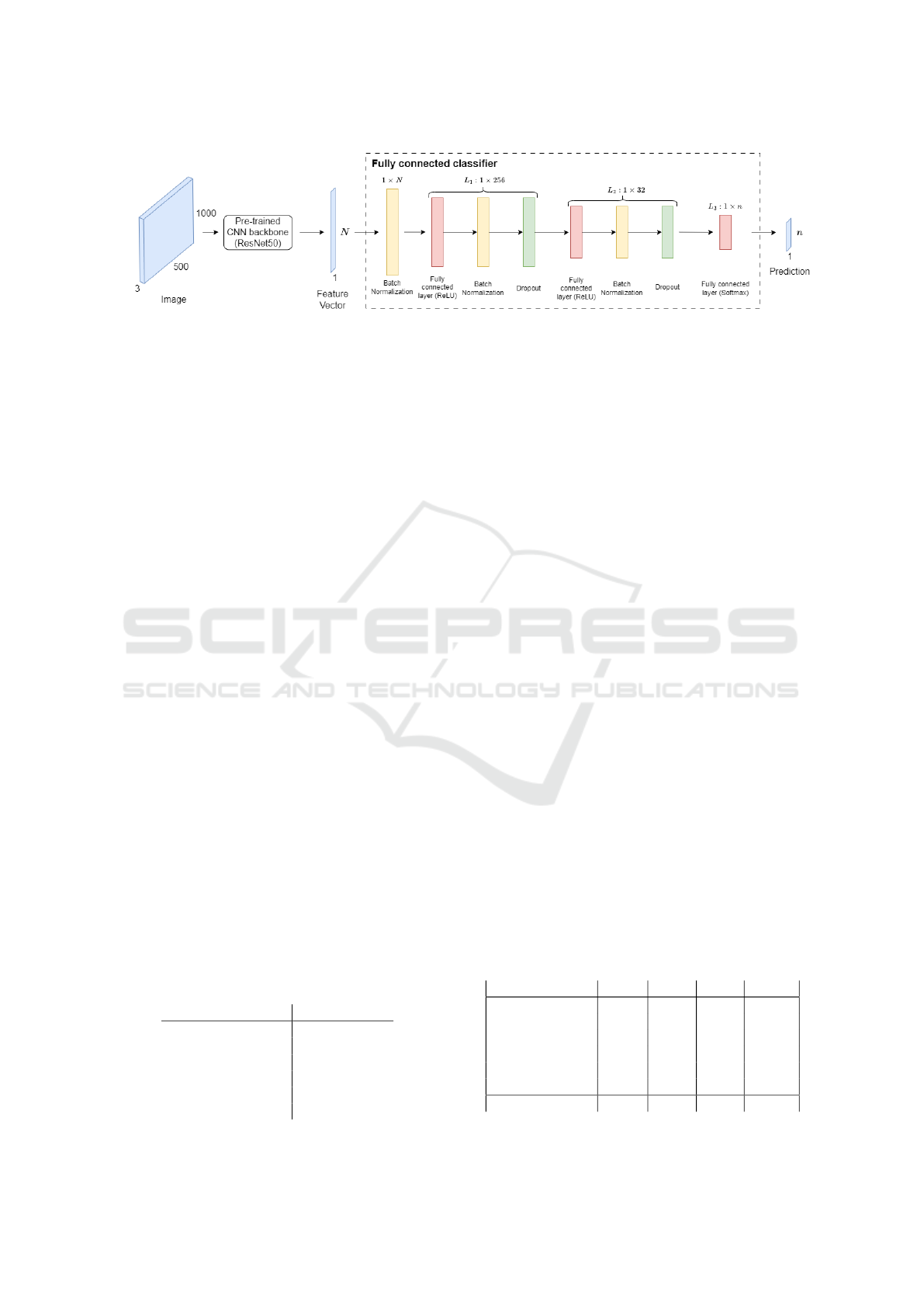
Figure 7: Architecture of the proposed network.
3.2 Image Classifier
The proposed image classifier utilizes the concept of
CNNs based on the ResNet50 architecture (He et al.,
2015) trained on the ImageNet dataset (Stanford Vi-
sion Lab, 2023) where the classifying layer is sub-
stituted with a custom Fully Connected (FC) classi-
fier. This approach is common when designing CNN
networks, and is generally known as transfer learning
(Goodfellow et al., 2016). The particular architecture
was chosen, since it proved the most effective in re-
lated work (Lyngbye and Jakobsgaard, 2021).
The reason for using an existing CNN is that they
are trained on large datasets which in theory makes
them good general feature extractors. Choosing the
ResNet50 architecture was based on previous work in
(Lyngbye and Jakobsgaard, 2021) as presented in the
state of the art section, where different CNN back-
bones were tested on a similar image classification
problem.
The architecture of the proposed image classifier
is illustrated in figure 7. It takes a three channel
500 × 1000 pixel color image of a towel as an in-
put, as shown in figure 6. This image must be in
the BGR-format and be normalized to the ImageNet
dataset, since the ResNet50 architecture is trained on
this dataset. This is done by converting images to
the BGR-format and zero centering each of the color
channels of the image with respect to the ImageNet
dataset (Tensorflow, 2023).
The image is then processed by the ResNet50 ar-
chitecture, whose output features are flattened to a
feature vector of length 1 × N, where N is dependent
Table 1: CNN image classifier hyperparameters & optimal
values.
Hyperparameter Optimal value
Image dimension 500 × 1000
Learning rate 1 · 10
−4
Batch size 32
Dropout rate 0.5
FC classifier layers 2
Layer neurons 256, 32
on the input dimensions of images. This feature vec-
tor is then passed to the custom FC classifier, which
consists of two layers, L
1
, L
2
that contain 256 and 32
neurons, respectively. Additionally, each layer ap-
plies Batch Normalization (Ioffe and Szegedy, 2015)
and Dropout (Srivastava et al., 2014) to the outputs
of the fully connected layer respectively. This cus-
tom fully connected classifier yields a 1 × n vector
containing the probabilities of the image belonging to
each of the n classes in the dataset.
Apart from the data itself, the performance of the
proposed image classifier is influenced by the value
of the hyperparameters of the network. The hyper-
parameters seen in table 1 yield optimal performance
of the image classifier. They have been determined
experimentally by keeping all hyperparameter values
constant, except the one being tested, and then train-
ing networks for 20 epochs on a subset of the full
dataset using ten fold cross-validation.
4 DATASET
A dataset totalling 24120 images of six different types
of towels, of which three have non-identical faces,
has been collected. Illustrations of the different towel
types are given in figure 8. An overview is given in ta-
ble 2 where each row contains information about each
of the towel types. In each row, it can be seen how
many of the images have been labelled as ’Front’ or
’Back’ in their respective columns, in the case that the
towel type has non-identical faces. If not, the ’I’ col-
Table 2: Overview of the collected dataset and its contents.
Types Front Back I Total
’Nedlin’ 1623 1750 - 3373
’BathTowel’ 3342 3326 - 6568
’Rentex’ 1673 1768 - 3441
’VDK’ - - 6520 6520
’GrayStriped’ - - 1176 1176
’YellowStriped’ - - 1074 1074
Sum 6638 6844 8770 22152
Classification of Towels in a Robotic Workcell Using Deep Neural Networks
313

umn shows how many images of that type is in the
dataset. The ’Total’ column shows how many images
of a given towel type is in the dataset. The reason why
the number of towels classified as ’Front’ and ’Back’
is not equal, is due to the stochastic nature of how
towels are grasped by BLIZZ, where the probability
for BLIZZ to pick up a towel which must be labeled
’Front’ is equal to the probability to pick up a towel
which must be labeled ’Back’.
Images are always given two labels. The first la-
bel, referred to as the type label, is related to what
type of towel is present in the image. The second la-
bel, referred to as the face label, relates to the face
(a) ’NedlinFront’ (b) ’NedlinBack’
(c) ’BathTowelFront’ (d) ’BathTowelBack’
(e) ’RentexFront’ (f) ’RentexBack’
(g) ’VDK’ (h) ’GrayStriped’
(i) ’YellowStriped’
Figure 8: Illustrations of the six different towel types of
which the collected dataset in table 2 is comprised.
visible in the left-half side of the part of the image
captured by the ’Corner’ camera (See figure 3a). In
case of the image shown in figure 6, it is given the
type label ’Nedlin’, since the observed type matches
the images displayed in figures 8a and 8b. Addition-
ally, it is given the face label ’Front’, since the face
observed in the left-half side of the part of the image
captured by the ’Corner’ camera fits the image dis-
played in figure 8a.
5 RESULTS
Classification of the type of a towel is a multi-class
classification problem, since there exists more than
two different types of towels in the dataset presented
in section 4. On the other hand, the face classification
problem is inherently a binary classification problem,
since towels of the same type whose faces are non-
identical in the dataset have exactly two faces.
The proposed network has been trained and tested
on both classification problems separately. The full
dataset is used to test the type classification prob-
lem, thus containing n = 6 different classes. For the
face classification problem, the proposed network was
trained and tested on three different datasets. Each
of these datasets contains all images of only a sin-
gle towel type whose faces are non-identical. This
means that the proposed network was tested on three
different datasets, each containing all images of the
towel types ’Nedlin’, ’BathTowel’and ’Rentex’ re-
spectively, and each dataset having n = 2 classes.
All networks presented in this section have been
trained, validated and tested, using an 80/10/10 split
for 100 epochs, and the hyperparameters presented in
Figure 9: Confusion matrix for the network trained to clas-
sify types of towels. Network accuracy: 99.10%.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
314
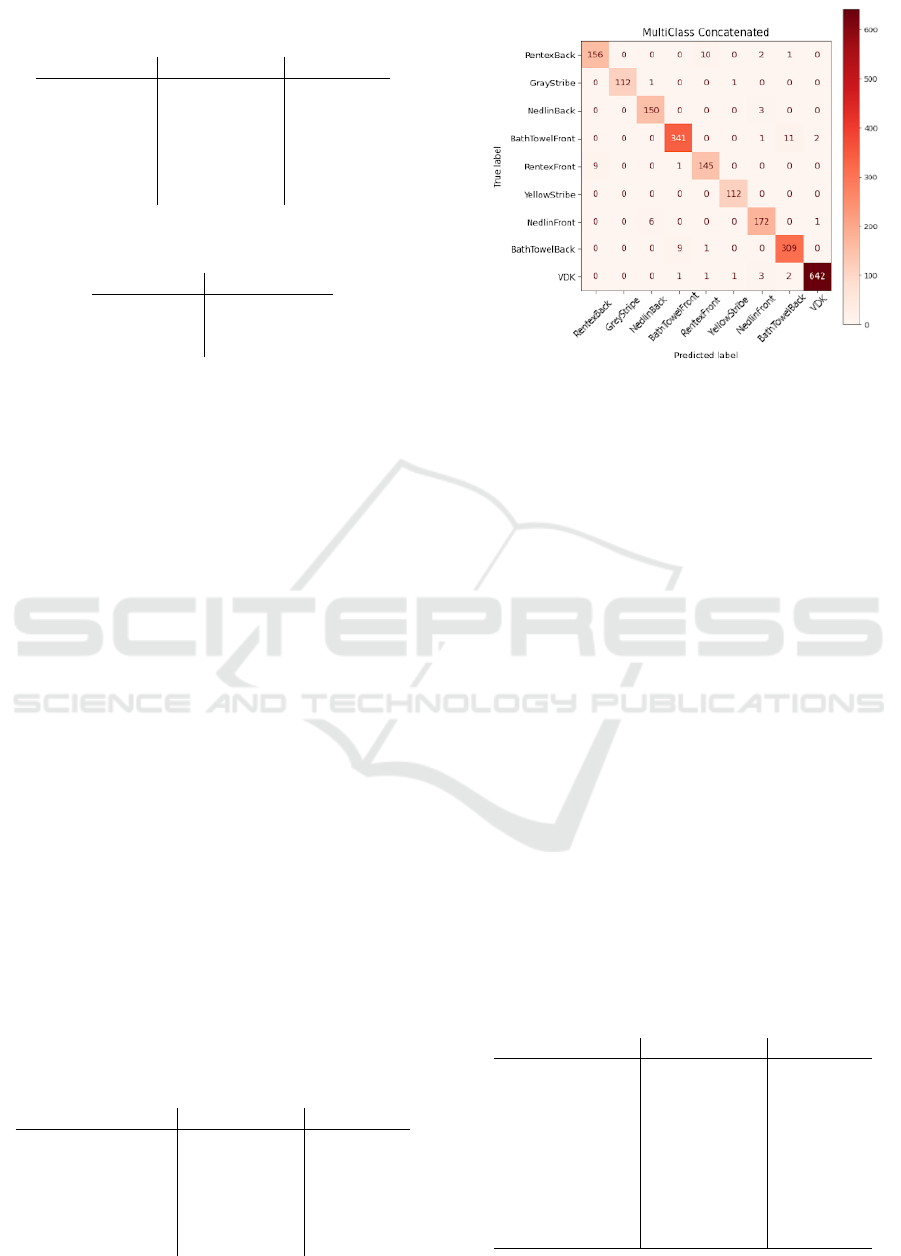
Table 3: Precision and recall values for the network trained
to classify types of towels.
Towel Type Precision [%] Recall [%]
YellowStripe 100 100
BathTowel 98.64 99.24
Nedlin 99.40 98.52
Rentex 99.71 99.71
GreyStripe 100 100
VDK 98.77 98.62
Table 4: Accuracies of the networks trained to classify
towel faces.
Towel Type Accuracy [%]
BathTowel 97.71
Nedlin 98.52
Rentex 94.48
section 3.2. The categorical cross entropy function
has been used to calculate the loss, with the exception
of the network trained to solve the face classification
problem, where the binary cross entropy loss function
has been used instead. Furthermore, the Adam opti-
mizer is used during training (Kingma and Ba, 2017).
The confusion matrix of the network trained to
solve the type classification problem is shown in fig-
ure 9, from which the network accuracy is calculated
to be 99.10%, while the precision and recall of the
network on the individual types of towels is shown
in table 3. The accuracy, precision and recall metrics
have been calculated using the information found in
(Evidently AI, 2023). Similarly, the accuracies for the
network trained to solve the face classification prob-
lem on the three different datasets is shown in table 4,
while the precision and recall for each towel type and
face combination is shown in table 5.
A single network has also been trained on the full
dataset presented in table 2 to solve both classification
problems, meaning that it can determine both the type
and face given an image of a towel. This is achieved
by combining the type and face attributes of towels
into a total of n = 9 classes for the classifier to choose
from. For example, a towel whose faces are non-
identical would create two new classes, e.g. ’Nedlin-
Front’ and ’NedlinBack’. Meanwhile, a towel whose
faces are identical would create only one class, e.g.
’VDK’. The performance of this network is shown in
Table 5: Precision and recall values for the networks trained
to classify towel faces.
Towel Face Precision [%] Recall [%]
BathTowel - Front 97.00 98.48
BathTowel - Back 98.45 96.95
Nedlin - Front 98.01 98.67
Nedlin - Back 98.92 98.40
Rentex - Front 94.41 94.94
Rentex - Back 94.55 93.98
Figure 10: Confusion matrix for the network trained to clas-
sify both types and faces of towels. Network accuracy:
96.96%.
the confusion matrix in figure 10, while the precision
and recall of each of the classes are shown in table 6.
6 DISCUSSION
When examining tables 4 and 5, it can be seen the
the network trained to solve the face classification
problem on a dataset consisting only of towels of the
’Rentex’ type performs significantly worse than the
two other tested networks. This is believed to be
caused by a difference in the appearance of the towel,
since the central logo on the ’Rentex’ towel type (fig-
ures 8e and 8f) is more easily obscured on images than
the off-center logo on the ’Nedlin’ towel type (figures
8a and 8b), thus increasing the difficulty for the net-
work to classify correctly. Additionally, this assump-
tion is supported when comparing the ’Rentex’ and
’BathTowel’ towel types. Although the ’BathTowel’
towel type dataset contains substantially more images
than the ’Rentex’ towel type dataset, its characteristic
feature runs along the entire edge of the towel (fig-
Table 6: Precision values for the network trained to classify
both towel types and faces.
Dataset class Precision [%] Recall [%]
RentexBack 94.55 92.31
RentexFront 92.36 93.55
NedlinBack 95.54 98.04
NedlinFront 95.03 96.09
BathTowelBack 95.67 96.87
BathTowelFront 97.15 96.06
GreyStripe 100 98.25
YellowStripe 98.25 100
VDK 99.53 98.77
Classification of Towels in a Robotic Workcell Using Deep Neural Networks
315

ures 8c and 8d), thus almost guaranteeing that it will
be visible when images are taken of that towel type.
As can be seen in the overview of the dataset in
table 2 as well as in the confusion matrices in sec-
tion 5 (figures 9 and 10), the dataset is imbalanced,
with some classes containing more images than oth-
ers. This is caused by the availability of towels dur-
ing data collection, i.e. there were more towels avail-
able for some towel types than others, as well as the
data collection process being automatic. It has been
attempted to minimize the effects of an imbalanced
dataset by matching the distribution of the full dataset
when splitting it into training, validation and testsets.
As seen in results of the network trained on the full
dataset to solve the type classification problem (ta-
ble 3), the imbalance doesn’t seem to be a problem,
since classes with a relatively large amount of data
(’VDK’) achieve comparable metrics to classes with
relatively small amounts of data (’GreyStriped’, ’Yel-
lowStriped’).
7 CONCLUSION
In conclusion, this paper presents a proof of concept
which is capable of capturing and processing images
of towels being processed by Inwatecs BLIZZ using
two mounted depth cameras. Furthermore, a CNN
network has been developed, which classifies both the
type and face of towels. This proof of concept can be
used by BLIZZ to improve its functionality, enabling
it to deliver towels to folding machines more consis-
tently, while also improving its versatility.
A dataset consisting of six different types of towel,
of which three have non-identical faces and total-
ing 22152 images has been collected and labelled.
The developed image classification network has been
trained and tested on this dataset, resulting in an ac-
curacy of 99.10% when it is trained to solve only the
type classification problem. Likewise, the proposed
network trained to solve only the face classification
problem achieves an accuracy of 94.48%, 97.71% and
98.52% on three different datasets consisting of im-
ages of just the ’Rentex’, ’BathTowel’ and ’Nedlin’
towel types, respectively. Comparatively, when the
proposed network is trained to solve both classifica-
tion problems, it achieves an accuracy of 96.96%.
REFERENCES
Dawson-Howe, K. (2014). A Practical Introduction to
Computer Vision with OpenCV. Wiley Publishing, 1st
edition.
Evidently AI (2023). Accuracy, precision, and recall in
multi-class classification. https://www.evidentlyai.
com/classification-metrics/multi-class-metrics. Ac-
cessed: 18-09-2023.
Gabas, A., Corona, E., Aleny
`
a, G., and Torras, C. (2016).
Robot-aided cloth classification using depth informa-
tion and cnns. In Articulated Motion and Deformable
Objects.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Rep-
resentation Learning, page 536. MIT Press. http:
//www.deeplearningbook.org.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition.
Inwatec (2023a). Inwatec. https://inwatec.dk/. Accessed:
14-09-2023.
Inwatec (2023b). Thor. https://inwatec.dk/products/
thor-robot-separator/. Accessed: 14-09-2023.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Lyngbye, M. A. and Jakobsgaard, M. S. (2021). Garment
classification using neural networks. Master’s thesis,
University of Southern Denmark, Odense, Denmark.
Maitin-Shepard, J., Cusumano-Towner, M., Lei, J., and
Abbeel, P. (2010). Cloth grasp point detection based
on multiple-view geometric cues with application to
robotic towel folding. In 2010 IEEE International
Conference on Robotics and Automation, pages 2308–
2315.
Paulauskaite-Taraseviciene, A., Noreika, E., Purtokas,
R., Lagzdinyte-Budnike, I., Daniulaitis, V., and
Salickaite-Zukauskiene, R. (2022). An intelligent so-
lution for automatic garment measurement using im-
age recognition technologies. Applied Sciences, 12(9).
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Navab, N., Hornegger, J., Wells,
W. M., and Frangi, A. F., editors, Medical Image Com-
puting and Computer-Assisted Intervention – MICCAI
2015, pages 234–241, Cham. Springer International
Publishing.
Sewts (2023). Velum. https://www.sewts.com/velum/. Ac-
cessed: 14-09-2023.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A simple way
to prevent neural networks from overfitting. J. Mach.
Learn. Res., 15(1):1929–1958.
Stanford Vision Lab (2023). Imagenet. https://www.
image-net.org/. Accessed: 14-09-2023.
Tensorflow (2023). Resnet50-preprocess
input.
https://www.tensorflow.org/api docs/python/tf/keras/
applications/resnet50/preprocess input. Accessed:
27-08-2023.
Yu, Y., Wang, C., Fu, Q., Kou, R., Huang, F., Yang, B.,
Yang, T., and Gao, M. (2023). Techniques and chal-
lenges of image segmentation: A review. Electronics,
12(5).
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
316
