
Autonomous Drone Takeoff and Navigation Using Reinforcement
Learning
Sana Ikli
1
and Ilhem Quenel
2
1
Hybrid Intelligence, Capgemini Engineering, 4 Avenue Didier Daurat, 31700 Blagnac, France
2
Applied AI program pilote, Capgemini Engineering, 4 Avenue Didier Daurat, 31700 Blagnac, France
Keywords:
Drone Navigation, Reinforcement Learning, Machine Learning, Drone Simulators.
Abstract:
Unmanned Aerial Vehicles, also known as drones, are deployed in various applications such as security and
surveillance. They also have the key benefit of being able to operate without a human pilot, which make them
suitable to access difficult areas. During autonomous flights, drones can crash or collide with an obstacle.
To prevent such situation, they need an obstacle-avoidance solution. In this work, we are interested in the
navigation with obstacle avoidance of a single drone. The goal is to autonomously navigate from an origin
to a destination point, including takeoff, without crashing. Reinforcement learning is a valid solution to
this problem. Indeed, these approaches, coupled with deep learning, are used to tackle complex problems
in robotics. However, the works in the literature using reinforcement learning for drone navigation usually
simplify the problem into 2-D navigation. We propose to extend these approaches to complete 3-D navigation
by using a state-of-the-art algorithm: proximal policy optimization. To create realistic drone environments,
we will use a 3-D simulator called Pybullet. Results show that the drone successfully takes off and navigates
to the indicated point. We provide in this paper a link to our video demonstration of the drone performing
navigation tasks.
1 INTRODUCTION
In our previous work (Ikli, 2022), we consider the
scheduling of flying taxi operations, which is simi-
lar to the scheduling of drone missions. The goal
was to transport a parcel from an origin to a desti-
nation point, while satisfying some operational con-
straints. However, we simplified the problem by con-
sidering that the drone (or the flying taxi), after the
vertical takeoff, follows a straight line to the destina-
tion point, and then it lands vertically. Moreover, we
didn’t consider any obstacles between the origin and
the destination points. In our current work, we are
interested in the navigation problem of the drone in
a realistic environment. More specifically, we want
the drone to autonomously navigate between the ori-
gin and the destination points, while avoiding obsta-
cles. To simplify the autonomous navigation, we con-
sider the takeoff and the navigation to the destination
point as two separate tasks. Indeed, we first focus on
the drone’s takeoff to reach a predefined target take-
off point. Then, we consider the navigation from this
target point to our destination point. Finally, we com-
bine the two models (takeoff and simple navigation)
to obtain a complete navigation model. The particu-
larity of our work is that we consider 3-D navigation,
unlike the majority of works in the literature that per-
form lateral navigation only.
Reinforcement Learning (RL)
1
) techniques are
used to tackle a wide variety of control problems,
such as aircraft autonomous sequencing and schedul-
ing (Brittain and Wei, 2021). For this reason, we in-
tend to use these algorithms to solve the drone take-
off and navigation problems. In the next section, we
present a brief overview of RL concepts and algo-
rithms. We also provide a synthesis of the most rel-
evant articles in the literature that use RL for drone
navigation problems.
2 STATE-OF-THE-ART
Reinforcement learning is a Machine Learning (ML)
paradigm concerned with how an agent can optimally
behave in an unknown environment. Unlike super-
vised learning, where the agent learns from labeled
1
Acronyms and their meaning are outlined in Table 3.
Ikli, S. and Quenel, I.
Autonomous Drone Takeoff and Navigation Using Reinforcement Learning.
DOI: 10.5220/0012296300003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 63-71
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
63
input and output data, RL agents learn by interact-
ing with the environment through trials and errors.
We present in this section a brief introduction to rein-
forcement learning concepts, and a “tour d’horizon”
of articles using these algorithms for drone naviga-
tion.
2.1 Overview of Reinforcement
Learning
The basic framing of a reinforcement learning prob-
lem is the Markov Decision Process (MDP), defined
by a quadruplet (S, A, T, r) where:
• S is a set of states that represent the system at a
given time. It can be discrete or continuous.
• A is a set of actions, i.e., the possible interactions
with the environment.
• T is a transition function. Given a state and an
action, T defines the transition probability to the
possible resulting states.
• r is the immediate reward after transitioning to the
resulting state.
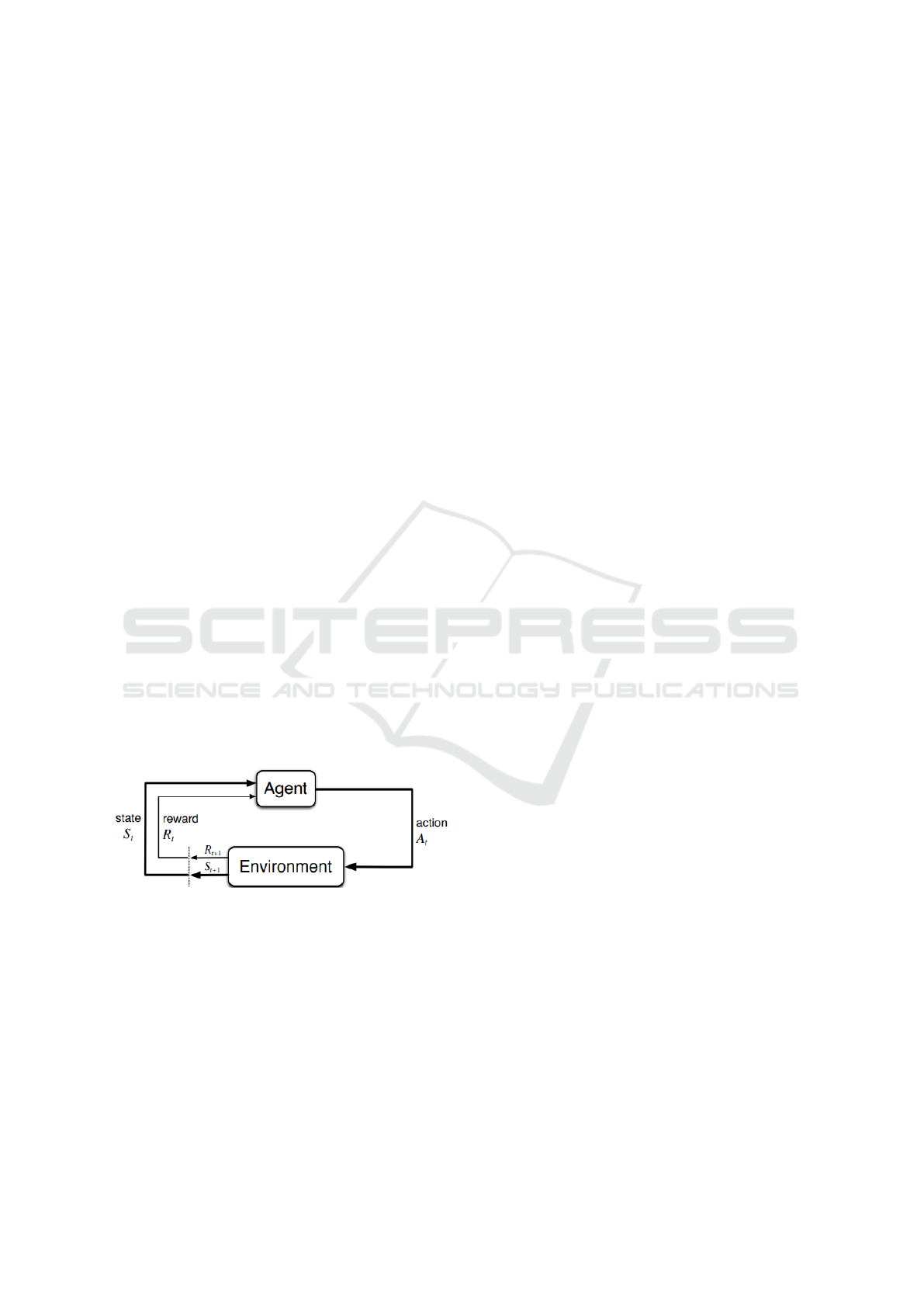
A basic RL agent interacts with its environment
in discrete time steps. At each time t, the agent
receives the current state s
t
and reward r
t
. It then
chooses an action a
t
which is executed in the en-
vironment. The agent then moves to a new state
s
t+1
and the reward r
t+1
associated with the transi-
tion (s
t
, a
t
, s
t+1
) is determined (See Figure 1). The
goal of a RL agent is to learn the optimal policy:
π : A×S → [0, 1], π(a, s) = Pr(a
t
= a|s
t
= s) that max-
imizes the sum of discounted future rewards.
Figure 1: Agent-environment interaction in an MDP.
Source: (Sutton and Barto, 2018).
Various methods are available in RL to approx-
imate this optimal policy. The main approaches
are value-function-based algorithms, such the Q-
Learning (Watkins and Dayan, 1992), where the sum
of rewards (known as return) is repeatedly estimated
and the policy π is improved. Another category of
RL algorithms are the model-free algorithms, that
simply learn from the samples, gathered from inter-
actions with the environment. Finally, we can cite
the policy-gradient algorithms, that we will use in
this work. As opposed to value-function-based algo-
rithms, policy-based algorithms directly estimate the
parameters of the optimal policy, usually modeled as
an artificial neural network. Readers may refer to the
book of (Sutton and Barto, 2018) for an in-depth de-
scription of all the reinforcement learning algorithms
categories.
For the drone takeoff and navigation tasks, no rep-
resentation of the environment is provided; the only
information the drone has about its environment are
obstacles locations and the destination point. Hence,
model-free RL algorithms are the most adapted to
this context. We chose a policy-gradient-based algo-
rithm called the Proximal Policy Optimization (PPO).
It was proposed by (Schulman et al., 2017), and is
one of the most successful deep reinforcement learn-
ing algorithms in solving various tasks (Wang et al.,
2020). It benefits from trust-region policy optimiza-
tion methods, and it (empirically) has better sample
efficiency (Schulman et al., 2017).
We choose this algorithm for mainly two reasons:
(i) It is suited to MDPs with continuous state and ac-
tion spaces, which is our case (see Section 3). (ii) It
has good convergence properties, and showed good
results in other control problems in robotics (Schul-
man et al., 2017).
2.2 Drone Navigation in the Literature
Despite its success in solving complex control prob-
lems, reinforcement learning is rarely used in the lit-
erature to tackle the autonomous drone navigation
problem. The majority of the works use standard
optimization or path planning methods (Yasin et al.,
2020). In this section, we overview some of the most
relevant RL techniques for drone navigation prob-
lems. We summarize in Table 1 the approaches dis-
cussed in this section. For an in-depth and compre-
hensive review, readers may refer to the recent survey
of (AlMahamid and Grolinger, 2022).
In order to use reinforcement learning, the prob-
lem of drone navigation must be expressed as an
MDP. In (Wang et al., 2017), the following MDP
model was proposed:
• States contain the distance between the drone and
the obstacles and the angle between the current
position and the destination.
• Actions consist only of a change in the drone’s
heading.
• The reward is composed of four components: an
environment penalty, a transition recompense, a
constant step penalty, and a direction reward.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
64

Table 1: A summary of RL techniques for drone navigation.
Source Description Sensor Solution
method
Simulator Remarks
(Wang et al., 2017) Drone navigation
between two points
GPS RDPG, Fast-
RDPG
Simulated
environment
Need to test on a sim-
ulator or more realistic
environments
(Sampedro et al.,
2018)
Drone navigation
in unknown envi-
ronment
Laser DDPG Gazebo with
ROS
Consideration of dy-
namic obstacles
(Dankwa and Zheng,
2019)
model and train a
4-ant-legged robot
Camera DDPG Pybullet Long training phase
(Beeching et al.,
2021)
3-D control of a
robot
Camera A2C ViZDoom Separate test scenario
configuration
(Morad et al., 2021) Drone navigation
using RGB Cam-
era
Camera Deep RL Simulated
environment
Test on real-world
drones
To solve the model, the authors use a deep RL al-
gorithm called RDPG (Recurrent Deterministic Pol-
icy Gradient). They also improved this algorithm to
make it faster.
Another deep RL framework is proposed
in (Sampedro et al., 2018) to solve the autonomous
navigation of a drone in an unknown environment,
using a laser as a sensor. The proposed method is
a mapless reactive approach, based on the Deep
Deterministic Policy Gradient (DDPG). Simulation
experiments are conducted in the Gazebo environ-
ment (Furrer et al., 2016) with ROS (Robot Operating
System) (Quigley et al., 2009). The training is
performed on a 8m × 8m square. Results show the
reactive navigation capability of the drone, especially
in the presence of dynamic obstacles.
The authors of (Dankwa and Zheng, 2019) pro-
pose a Twin-Delayed DDPG (TD3) algorithm to
model and train a 4-ant-legged virtual robot. The TD3
algorithm consists of three RL methods: Continuous
Double Deep Q-learning, policy gradient, and actor-
critic. The virtual robot is modeled in the environment
called “AntBulletEnv-v0”, from Pybullet
2
package in
Python. Thus, the components of the MDP (states, ac-
tions, and reward) are defined in the environment. The
robot was trained by performing 500000 iterations of
TD3 algorithm, and succeeded in obtaining compara-
ble results with state-of-the-art RL algorithms.
A number of works have addressed the drone nav-
igation problem, but the majority oversimplify it, by
only considering turning right or left as possible ac-
tions for the drone. In our work, we propose to extend
these works to complete 3-D navigation. We present
in the next section our MDP formulation for the two
drone tasks: takeoff and simple navigation.
2
Pybullet: https://pybullet.org/wordpress/
3 PROBLEM MODELING
To autonomously navigate while avoiding obstacles,
the drone needs to extract information from its en-
vironment using sensors (e.g. RGB camera). Then,
it generates actions such as “Go to position (x, y, z)”
or “Decrease the speed” to avoid the obstacles. This
problem is formulated as a Markov decision process,
composed of states, actions and rewards.
• A state in our MDP model represents a vector
(x, y, z) that defines the position of the drone in
the 3-D environment. In our work, this position is
directly obtained from the API (Application Pro-
gramming Interface) of the simulator.
• Actions consist in changing the position of the
drone, in the 3D environment according to the
X, Y , and Z axes. The state and action spaces are
thus continuous.
• Rewards: The ultimate goal is to make the drones
navigate to a destination point. This goal is de-
composed into two tasks: (i) Takeoff to join a tar-
get point, (ii) navigate from this point to the desti-
nation. This second task is referred to as “simple
navigation” task. In the next subsection, we ex-
plain the different rewards we designed for each
task.
3.1 Reward Design
Reward design was very challenging. We first tried
classical and simple rewards that recompense the
drone with a positive value if it correctly performs
the task (takeoff or simple navigation), and penalize
it with a negative value if it crashes or hits an obsta-
cle. This kind of reward causes the drone to crash af-
ter a few steps. We then designed some rewards based
Autonomous Drone Takeoff and Navigation Using Reinforcement Learning
65
on the simple Euclidean distance between the drone’s
position and the target point (for takeoff or destination
point for navigation). An example of these rewards
is: −∥(x
target
, y
target
, z
target
) − (x, y, z)∥
2
2
. This formu-
lation simply encourages the drone to go to the tar-
get point (x
target
, y
target
, z
target
). Using these rewards
causes the drone to either crash on the ground or fly
away from all obstacles.
Fortunately, we designed a new reward that is pos-
itive, bounded in [0, 1], and differentiable. This for-
mulation rewards the drone when it gets closer to a
target point (x
target
, y
target
, z
target
), using the Gaussian
function (1).
r
gauss
= e
−∥(x
target
,y
target
,z
target
)−(x,y,z)∥
2
2
(1)
For the takeoff task, the drone is located in the
initial position (0, 0, 0). For the simple navigation, the
drone is located in the target take-off point. The target
point in the equation (1) is:
• (x
target
, y
target
, z
target
) = (0, 0, 1) for the takeoff
task,
• (x
target
, y
target
, z
target
) = (1, 1, 2) for the simple
navigation.
We add several terms to the reward (1) to further
improve the drone’s behavior and encourage smooth
movements. These terms will be detailed in Sec-
tion 4.2.
4 SIMULATION RESULTS
This section presents the computational results of
implementing the above-mentioned MDP model.
The implementation of the PPO algorithm is adapted
from the Stable-Baselines (Hill et al., 2018) library
with the default parameters. Simulation results are
reported in terms of several performance indicators,
such as the drone’s position, its velocity, and the
reward it obtains. For a more visual result, we
record a video demonstration of the drone after the
training is completed. The first video is entitled
drone-take-off-and-hover-demo-pybullet
and shows the drone’s takeoff and hov-
ering near the target point (0, 0, 1). It is
available at: https://www.youtube.com/
shorts/h2TYtB2MYtA. The second video
drone-combined-takeoff-navigation-pybullet
features the drone performing the complete
navigation task. It is available at: https:
//www.youtube.com/watch?v=ev5XTAAt73s&
ab_channel=Demo-Drone.
4.1 Simulation Setup
We use a simple yet popular drone simulator
based on Pybullet (Erwin and Yunfei, 2019), called
gym-pybullet-drones. It is an open-source sim-
ulator, and can be directly installed from this
GitHub link: https://github.com/utiasDSL/
gym-pybullet-drones. To simulate the drone and
its environment, we adapt the TakeoffAviary class
(provided in the simulator) to our MDP model defined
in Section 3. Moreover, we include obstacles with dif-
ferent shapes and configurations in the environment.
Figure 3 shows a screenshot of the graphical interface
of our simulated environment. We can see in this fig-
ure the drone is in the initial position (0, 0, 0). We can
also notice that all the obstacles have the same tex-
ture and are all colored blue. This is one inconvenient
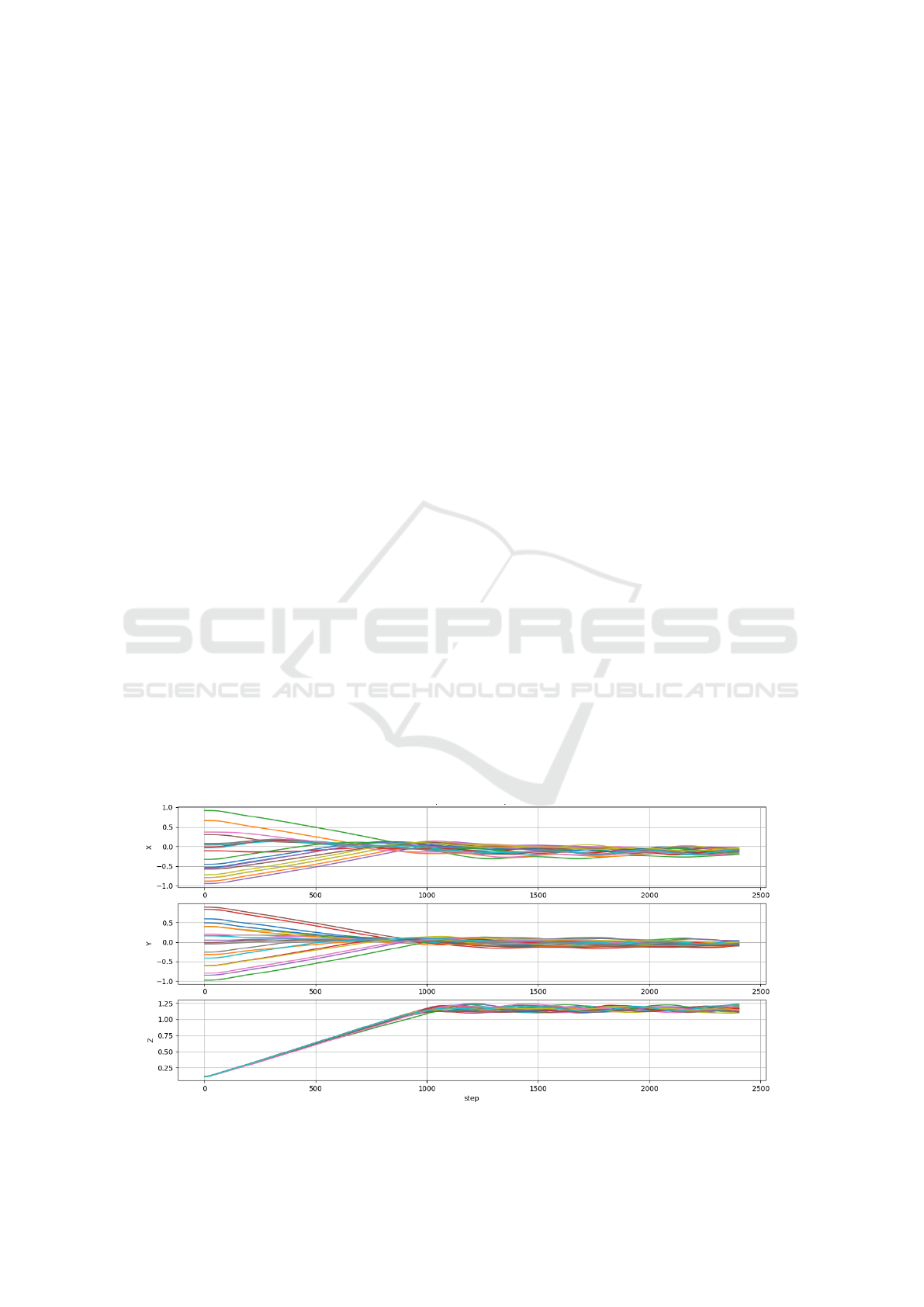
Figure 2: Drone positions in the X-Y-Z axes for 20 episodes with the trained PPO algorithm.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
66

feature of this simulator, because it does not allow the
customization of objects included in Pybullet environ-
ments.
Figure 3: Simulated environment in gym-pybullet-drones.
In this work, we use Python 3.9 as a programming
language. The experiments are run on a personal
computer under the Windows operating system, with
a processor of the 11th Gen of Intel(R) Core(TM) i5-
11500H with 16 GB of RAM.
4.2 Takeoff Results
We first analyze the results for the takeoff task, in
which the drone should navigate and hover above the
target takeoff point (0, 0, 1). Then, we present the re-
sults for the simple navigation task, from the target
takeoff point to the destination point (1, 1, 2). Finally,
we combine the two model to obtain the complete
navigation, from the initial point (0, 0, 0) to the desti-
nation position (1, 1, 2).
4.2.1 Training and Testing Results
We train the PPO algorithm for one million time steps,
which required around one hour to complete the train-
ing. Training metrics are monitored live via Tensor-
board (Abadi et al., 2015).
We present in Table 2 some training parameters.
We change the initial position in the X-Y axes to be
randomly generated in [−1, 1], to further encourage
exploration of the environment. However, we main-
tain the remaining parameters of each algorithm as the
default ones provided in the Stable-Baselines library.
After training is completed, we test the trained
PPO agent for 20 episodes. Figure 2 shows the results
in terms of drone positions in the X-Y-Z axes. As de-
picted in this figure, the drone succeeds in taking-off
and hovering above the target point (0, 0, 1). Indeed,
after 1000 steps, the x and y positions are stabilized
around 0, while the z coordinate is stabilized around
1. We can conclude that with the reward formula-
tion (1), the PPO agent succeeds in accomplishing the
takeoff task and hovering above the target point.
Table 2: Training parameters.
Parameters Values
Origin point (0, 0, 0)
Initial drone point −1 ≤ (x, y) ≤ 1
Target take-off point (0, 0, 1)
Destination point (1, 1, 2)
Total training steps 1 Million
Learning rate 0.0003
Maximum episode length 5 seconds
Other training parameters Default in the Stable-Baselines3
We further analyze the drone behavior right after
takeoff, by looking at different indicators: The drone
velocity in the three axes X-Y-Z and the drone rota-
tion (pitch and yaw). We present in Figure 4 the drone
velocity in the X-axis, and the pitch and yaw angles
of the drone during testing. As depicted in this figure,
the drone’s velocity on the X-axis is very unstable.
Furthermore, the drone’s pitch and yaw angles oscil-
late around 0, but these oscillations tend to diverge,
which may lead to the loss of its control.
In order to improve the drone’s behavior and en-
courage smooth movements, we propose to include
the following sub-rewards to the formulation (1).
• Altitude term: that encourages the drone to hover
at the given altitude:
r
altitude
= e
−(1−z)
2
(2)
• Smoothness term: that rewards smooth move-
ment. It can, for instance be based on the velocity
V of the drone:
r
smooth
= e
−∥V∥
2
2
(3)
• Collision term: that penalizes the drone whenever
it comes close to the obstacles.
r
collision
=
(
1 if d
obstacle
≥ 0.2,
0 otherwise.
(4)
Where d
obstacle
denotes the distance between the
drone and the closest obstacle3.
• Loss of control term: that helps to avoid danger-
ous or unstable states. It is based on the roll θ
r
and pitch θ
p
of the drone:
r
control
=
(
1 if |θ
r
| ≤ 30
◦
or |θ
p
| ≤ 30
◦
,
0 otherwise.
(5)
The final reward is the weighted sum of the main
reward (1), and the above-mentioned sub-rewards.
Figure 5 shows the new results regarding the veloc-
ity along the X-axis, the pitch and the yaw angles,
using this new weighted-sum reward. It can be seen
in this figure that the drone’s velocity is more sta-
ble. Moreover, its pitch and yaw angles oscillate
Autonomous Drone Takeoff and Navigation Using Reinforcement Learning
67
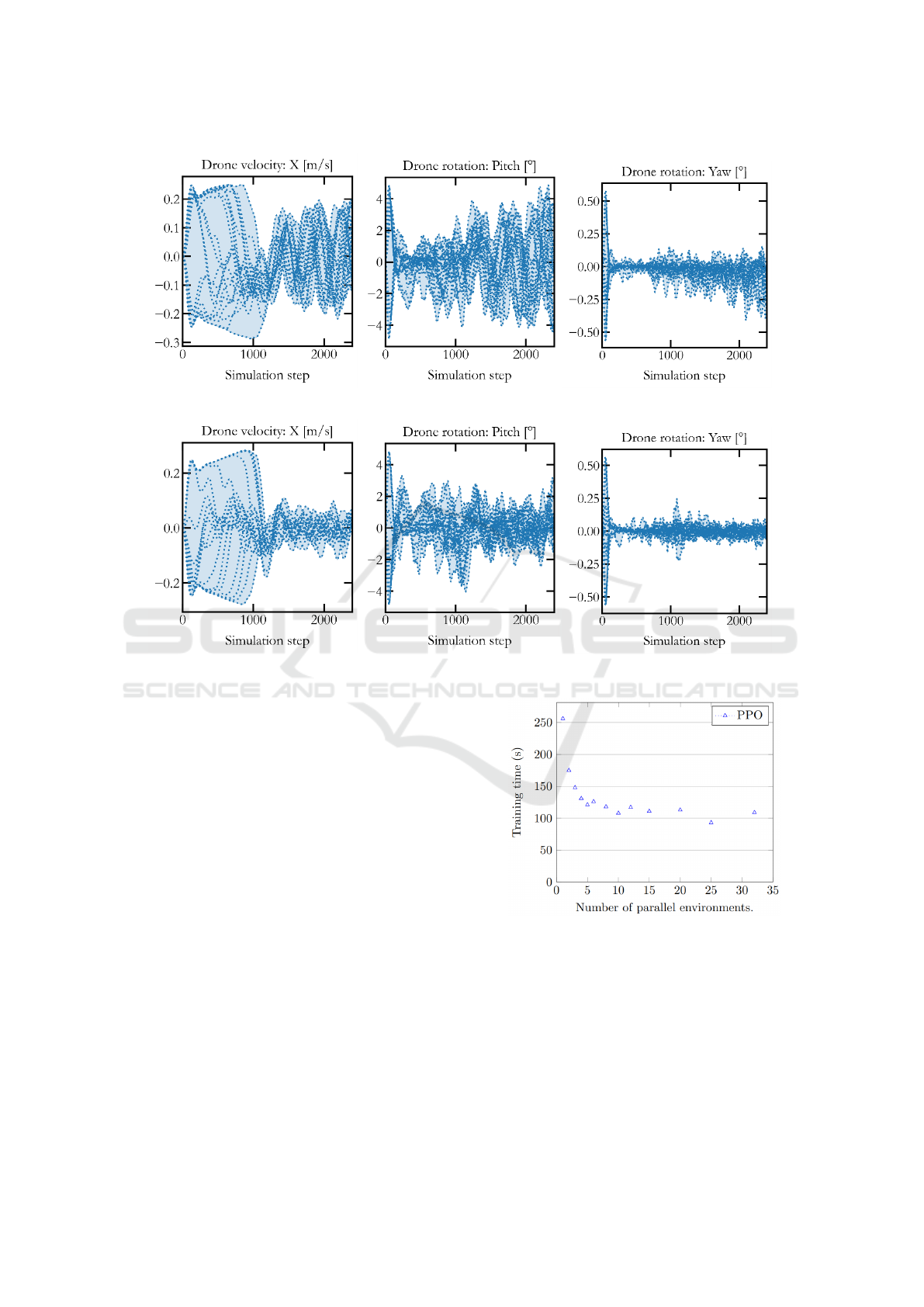
Figure 4: Drone’s velocity and rotations.
Figure 5: Drone velocity and rotations with the improved reward.
less, resulting in smooth drone movements. We pro-
vide a video demonstration of the drone perform-
ing the takeoff task, with smooth movements, avail-
able from the link: https://www.youtube.com/
shorts/h2TYtB2MYtA.
4.2.2 Parallelization
In order to decrease the training time, we can par-
allelize the training. Indeed, instead of training the
drone in a single environment during 1 million itera-
tions, we can lunch 10 trainings for 100 000 iterations
in parallel, thanks to a functionality in the Stable-
Baselines3 library. We show in Figure 6 the computa-
tion times using up to 35 training environments. We
can observe in this figure that by using ≈ 10 paral-
lel environments, the training time is divided by 2 for
the PPO algorithm. Using more parallel environments
does not necessarily yield significant gains. Hence,
for the next simulations, we define 10 parallel envi-
ronments for the training.
Figure 6: Training time for 100000 iterations.
4.3 Combined Takeoff and Navigation
In this part, we use the same simulation setup as in the
takeoff task, and we define 10 parallel environments
for the training. The only changes with respect to the
takeoff task are:
• The total training steps is now 2 millions steps,
which took around 3 hours.
• The initial point is the target take-off point
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
68
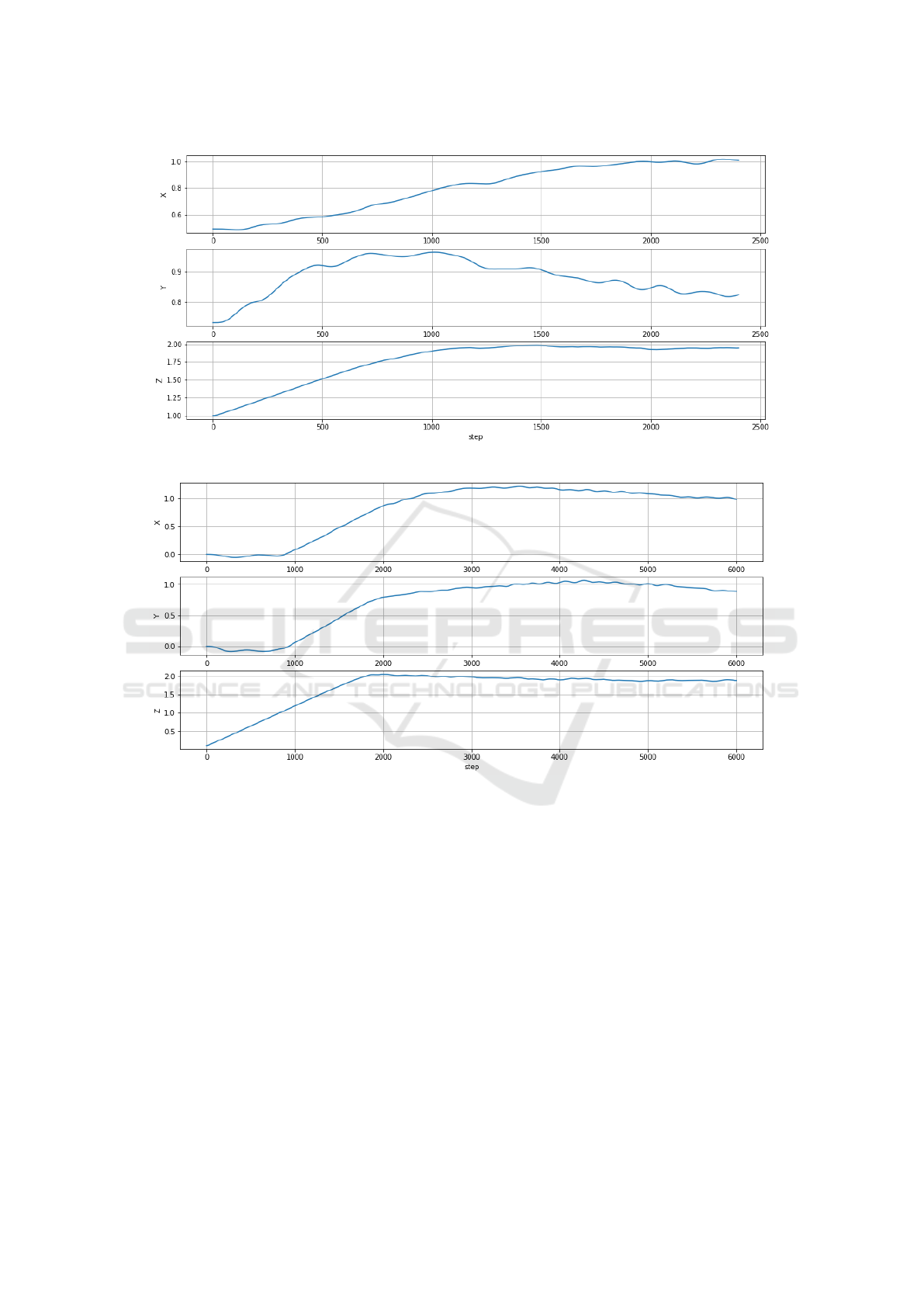
Figure 7: Drone positions in the X-Y-Z axis.
Figure 8: Drone positions in the X-Y-Z axis during one episode, with the combined model.
(0, 0, 1).
• The destination point is (1, 1, 2)
• The episode length is set to 15 seconds, in order
to have enough time for the drone to perform the
navigation task. Increasing the episode duration
further may cause longer training times.
For the simple navigation, the goal is to make the
drone navigate from the target takeoff point to the des-
tination point. The reward we use for this task is the
weighted sum reward, in which the target point is now
the destination point (1, 1, 2). We show in Figure 7 the
3D positions of the drone. As depicted in this figure,
the drone succeeds in navigating to the destination po-
sition (1, 1, 2), after around 1000 steps.
Finally, we combine the trained takeoff model
with the simple navigation to perform the complete
navigation task: takeoff from the ground and naviga-
tion to the destination point (1, 1, 2). Figure 8 fea-
tures the 3D position of the drone using the combined
model. We can observe in the figure that after 2000
steps, the x and y coordinates of the drone oscillate
around 1, and the z coordinates oscillate around 2.
We also noticed in all the simulations that whenever
the drone reaches a target point, it decides to hover
above it. A possible explanation is that the fact that
the reward is maximized at the target point. Thus, the
drone navigates near this point to not decrease its re-
ward.
For this combined model, we also provide an-
other video demonstration of the drone performing
the complete navigation task. The video is available
at this link: https://www.youtube.com/watch?v=
ev5XTAAt73s&ab_channel=Demo-Drone.
Autonomous Drone Takeoff and Navigation Using Reinforcement Learning
69

5 CONCLUSION AND
PERSPECTIVES
In this work, we consider the autonomous navigation
of a single drone using a state-of-the-art reinforce-
ment learning algorithm called proximal policy op-
timization. We split the navigation goal into two sep-
arate tasks: takeoff to join a target takeoff point and
a simple navigation task. We then combine the two
tasks to perform complete and autonomous naviga-
tion from the ground to a destination point. To model
these problems, we propose an adapted Markov Deci-
sion Process with a new reward, that enables the drone
to accomplish each task. Moreover, we improve the
reward formulation to encourage the drone to perform
smoother and more stable movements.
The numerical simulations are conducted in the
Pybullet simulator for drones, and using a well-
known reinforcement learning library called Stable-
Baselines3. Results show that the successful reward
that enables the drone to accomplish the takeoff and
the navigation tasks is non-negative, differentiable
and bounded. We also learn from this numerical study
that the training time can be significantly decreased
when training the drone in parallel in different envi-
ronments. We conclude from this study that reinforce-
ment learning approaches are promising techniques
for drone navigation. However, they have two main
drawbacks: (i) the challenging problem of designing
relevant rewards that include all the objectives in one
formulation, (ii) the need for millions of interactions
with the simulator in order to learn meaningful poli-
cies. The latter is called sample inefficiency, and it is
a well-known problem in reinforcement learning.
Future tracks of research include the extension
of this work to consider the landing on a specific
point. Designing a reward formulation that can in-
tegrate all these objectives (takeoff, navigation, land-
ing) together with obstacle avoidance can also be a
perspective of this work.
ACKNOWLEDGEMENTS
The authors would like to thank Jimmy Debladis, Be-
sma Khalfoun and Fadi Namour From Capgemini En-
gineering, for the technical discussions that greatly
improved the quality of this study.
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen,
Z., Citro, C., Corrado, G. S., Davis, A., Dean, J.,
Devin, M., Ghemawat, S., Goodfellow, I., Harp, A.,
Irving, G., Isard, M., Jia, Y., Jozefowicz, R., Kaiser,
L., Kudlur, M., Levenberg, J., Man
´
e, D., Monga, R.,
Moore, S., Murray, D., Olah, C., Schuster, M., Shlens,
J., Steiner, B., Sutskever, I., Talwar, K., Tucker, P.,
Vanhoucke, V., Vasudevan, V., Vi
´
egas, F., Vinyals,
O., Warden, P., Wattenberg, M., Wicke, M., Yu, Y.,
and Zheng, X. (2015). TensorFlow: Large-scale ma-
chine learning on heterogeneous systems. https:
//www.tensorflow.org/tensorboard.
AlMahamid, F. and Grolinger, K. (2022). Autonomous un-
manned aerial vehicle navigation using reinforcement
learning: A systematic review. Engineering Applica-
tions of Artificial Intelligence, 115:24 pages.
Beeching, E., Debangoye, J., Simonin, O., and Wolf, C.
(2021). Deep reinforcement learning on a budget: 3D
control and reasoning without a supercomputer. In
25th International Conference on Pattern Recognition
(ICPR).
Brittain, M. and Wei, P. (2021). Autonomous aircraft se-
quencing and separation with hierarchical deep rein-
forcement learning. In Learning-based decision mak-
ing for safe and scalable autonomous separation as-
surance.
Dankwa, S. and Zheng, W. (2019). Twin-delayed DDPG:
A deep reinforcement learning technique to model a
continuous movement of an intelligent robot agent. In
Proceedings of the 3rd International Conference on
Vision, Image and Signal Processing.
Erwin, C. and Yunfei, B. (2019). Pybullet, a python mod-
ule for physics simulation for games, robotics and ma-
chine learning. http://pybullet.org.
Furrer, F., Burri, M., Achtelik, M., and Siegwart, R. (2016).
Rotors—a modular gazebo MAV simulator frame-
work. In Robot operating system (ROS).
Hill, A., Raffin, A., Ernestus, M., Gleave, A., Kanervisto,
A., Traore, R., Dhariwal, P., Hesse, C., Klimov, O.,
Nichol, A., Plappert, M., Radford, A., Schulman, J.,
Sidor, S., and Wu, Y. (2018). Stable baselines. https:
//github.com/hill-a/stable-baselines.
Ikli, S. (2022). A rolling horizon approach for the dynamic
scheduling of flying taxis. In Proceedings of the IJCCI
2022 Conference. SCITEPRESS.
Morad, S. D., Mecca, R., Poudel, R. P., Liwicki, S., and
Cipolla, R. (2021). Embodied visual navigation with
automatic curriculum learning in real environments.
IEEE Robotics and Automation Letters, 2:683–690.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). ROS:
An open-source robot operating system. In ICRA
workshop on open source software.
Sampedro, C., Bavle, H., Rodriguez-Ramos, A.,
de La Puente, P., and Campoy, P. (2018). Laser-based
reactive navigation for multirotor aerial robots using
deep reinforcement learning. In IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS).
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. In arXiv preprint arXiv:1707.06347g.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
70
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press, 2nd edition.
Wang, C., Wang, J., Zhang, X., and Zhang, X. (2017). Au-
tonomous navigation of UAV in large-scale unknown
complex environment with deep reinforcement learn-
ing. In IEEE Global Conference on Signal and Infor-
mation Processing (GlobalSIP).
Wang, Y., He, H., and Tan, X. (2020). Truly proximal policy
optimization. In Uncertainty in Artificial Intelligence.
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8:279–292.
Yasin, J. N., Mohamed, S. A., Haghbayan, M.-H., Heikko-
nen, J., Tenhunen, H., and Plosila, J. (2020). Un-
manned aerial vehicles (UAVs): Collision avoidance
systems and approaches. IEEE access, 8:105139–
105155.
ACRONYMS
The following table defines the acronyms we used in
this article.
Table 3: Acronyms definition.
Acronym Meaning
DDPG Deep Deterministic Policy Gradient
MDP Markov Decision Process
ML Machine Learning
RDPG Recurrent Deterministic Policy Gradient
RL Reinforcement Learning
UAV Unmanned Arial Vehicles
Autonomous Drone Takeoff and Navigation Using Reinforcement Learning
71
