TenebrioVision: A Fully Annotated Dataset of Tenebrio Molitor Larvae
Worms in a Controlled Environment for Accurate Small Object
Detection and Segmentation
Angelos-Michael Papadopoulos
a
, Paschalis Melissas
b
, Anestis Kastellos
c
,
Panagiotis Katranitsiotis
d
, Panagiotis Zaparas
e
, Konstantinos Stavridis
f
and Petros Daras
g
The Visual Computing Lab - Centre for Research and Technology Hellas/Information Technologies Institute,
Thessaloniki, Greece
Keywords:
TenebrioVision, Dataset, Benchmark, Instance Segmentation, Object Detection, Worms, Tenebrio Molitor,
Edible Insects, Farming, Automation, Alternative Food Source.
Abstract:
Tenebrio molitor worms have shown extreme nutritional benefits, as they contain useful natural compounds,
making them worth as an alternative food source. It is beneficial for insect farms to have automated mech-
anisms that can detect these worms. Without an explicitly annotated dataset, the task of detecting tenebrio
molitor worms remains challenging and underdeveloped. To address this issue, we introduce TenebrioVi-
sion, which is a fully annotated dataset, suitable for the detection and segmentation of tenebrio molitor larvae
worms. The data acquisition is performed in a controlled environment. The dataset consists of 1,120 images,
with a total of 53,600 worm instances. The 1,120 images are equally distributed on 14 distinct levels, each
level containing a specific number of tenebrio monitor larvae worms. The dataset is validated in terms of
mean average precision, memory allocation, and inference time, on several state-of-the-art baseline methods
for both detection and segmentation purposes. The results unequivocally show that the detection and segmen-
tation accuracy is high on both TenebrioVision and real farm images.
1 INTRODUCTION
With the world’s population expected to reach 9.7 bil-
lion by 2050 (Desa, 2019), the high demand for an-
imal protein, without the detrimental environmental
effects of animal husbandry, poses significant chal-
lenges for global food production. The available food
stocks are limited and will eventually become insuf-
ficient to meet this demand. These core factors have
initialized the development of the appropriate indus-
trial production systems (Van Huis et al., 2013).
Insects have a high feed conversion efficiency, low
greenhouse gas emissions, high-quality protein, and
require overall fewer resources to produce than other
animal proteins. Moreover, they can be produced on
a
https://orcid.org/0009-0000-8117-312X
b
https://orcid.org/0009-0000-2657-9557
c
https://orcid.org/0009-0002-7812-1577
d
https://orcid.org/0009-0004-6509-6338
e
https://orcid.org/0009-0001-5407-7295
f
https://orcid.org/0000-0002-3244-2511
g
https://orcid.org/0000-0003-3814-6710
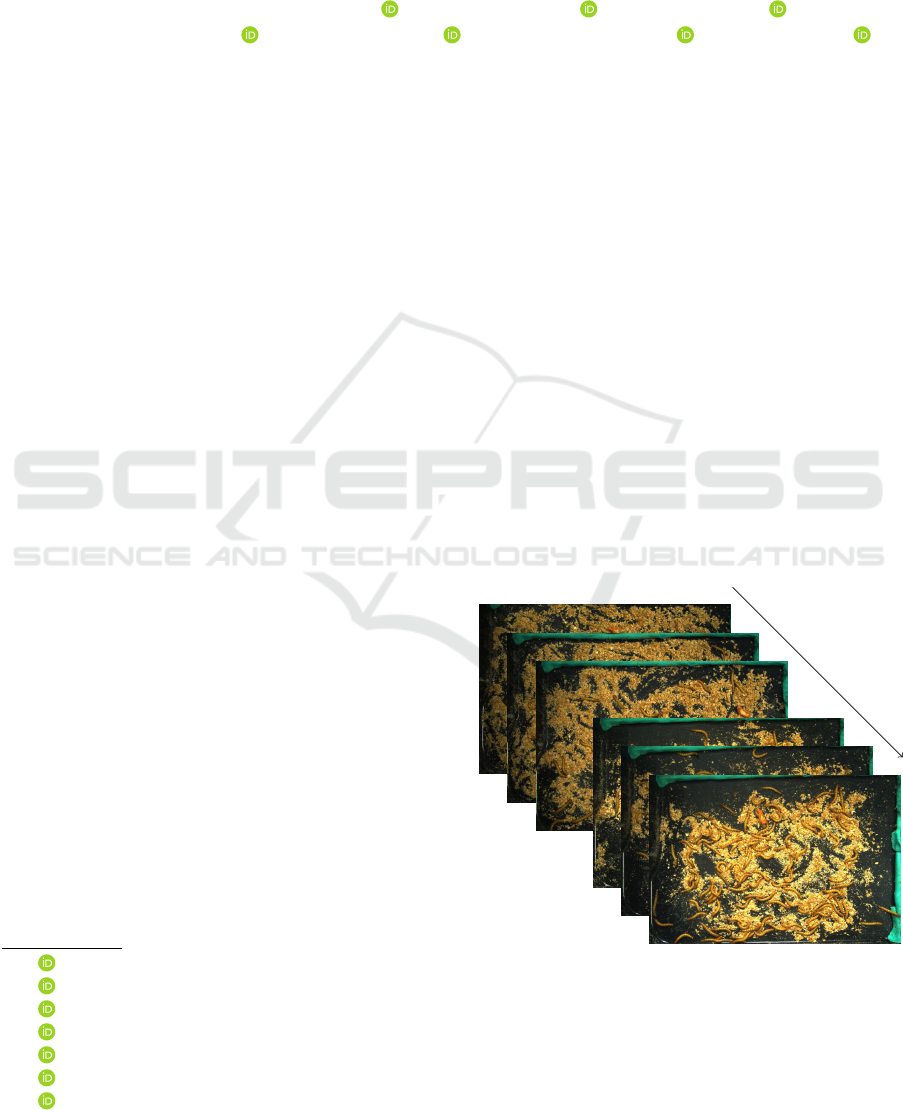
10, 15, 20, ... 80, 90, 100
Figure 1: TenebrioVision: Tenebrio molitor larvae worms
are present in a dataset of 1,120 images, ranging from
frames with 10 worms to frames with 100 worms.
a larger scale than traditional livestock. For these
reasons, several research studies (Ghaly et al., 2009;
Oonincx and De Boer, 2012; Brandon et al., 2021)
Papadopoulos, A., Melissas, P., Kastellos, A., Katranitsiotis, P., Zaparas, P., Stavridis, K. and Daras, P.
TenebrioVision: A Fully Annotated Dataset of Tenebrio Molitor Larvae Worms in a Controlled Environment for Accurate Small Object Detection and Segmentation.
DOI: 10.5220/0012295900003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 187-196
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
187

have highlighted the benefits of using insects as an
alternative source of animal protein for human con-
sumption.
The yellow mealworm, also known as Tenebrio
molitor, has demonstrated significant potential for hu-
man consumption. There are four development stages
of this species: Eggs, larvae, pupae, and adults. Tene-
brio molitor larvae is typically the preferred stage in
many countries where insects are consumed (Stoops
et al., 2016; Siemianowska et al., 2013). It is a valu-
able source of protein and minerals, easy to main-
tain, and can be harvested at an earlier stage of de-
velopment. Several studies (Costa et al., 2020) and
(Kr
¨
oncke and Benning, 2022) have shown that Tene-
brio molitor includes a nutritional composition sim-
ilar to other conventional meat sources. Therefore,
the European Commission implementing regulation
2023/58 (of the European Union, 2023) has officially
authorized the placing on the market of frozen, paste,
dried, and powdered larvae of Alphitobius diaperinus
(minor mealworm) as a novel food.
Tenebrio molitor, in its larvae development stage,
is therefore becoming increasingly popular for farm-
ing and raising edible insects, which highlights the
need for standardized and cost-effective production
techniques. There are already insect farms oper-
ating in numerous countries, but their production
systems lack efficient and scalable automation pro-
cesses (Grau et al., 2017), which can be supported by
computer vision and machine learning technologies.
Tenebrio molitor breeding procedures, such as feed-
ing, wetting larvae, classifying larvae by size, harvest-
ing chitinous moult, and finally harvesting larvae and
separating them from impurities, should be automated
and monitored in order to be profitable. The amount
of manual labor required by current farming methods
prevents them from being used for industrial-scale
production.
In this paper, a publicly available dataset called
“TenebrioVision” is introduced, which is a compre-
hensive, and fully annotated dataset for Tenebrio
Molitor larvae insects in a controlled environment.
TenebrioVision dataset consists of 1,120 images of
53,600 tenebrio molitor instances annotated for both
object detection and instance segmentation purposes
(figure 1). Every image is taken in a controlled setup
by a UI camera (UI-3884LE, 2021). The resolution of
each frame is 3088 x 2076 pixels. The dataset is dis-
tributed in 14 different levels, depending on the num-
ber of tenebrio molitor instances inside the crate, as
shown in figure 4. It should be noticed that localizing
insects in the visual scene at the level of the instance
mask is a fundamental step that enables further qual-
ity analysis in the field. The significance of Tenebri-
oVision dataset is then validated by running several
state-of-the-art baseline methods for detection and in-
stance segmentation. The intention for experimenting
with several SoTA models is to compare both the de-
tection/segmentation efficiency, but also their infer-
ence time on the TenebrioVision dastaset. A quick
inference time can be a vital asset in the farm indus-
tries, thus a comprehensive comparison is necessary.
Lastly, the high-value features learned from Tenebri-
oVision are tested on farm images, taken from a vari-
ety of real farm industry environments, some of them
containing a huge amount of tenebrio molitor insects,
uncountable even by an insect expert’s human eye.
By making this dataset available to the public, it is
believed that the following aspects will be positively
impacted:
• To the best of our knowledge, the TenebrioVision
dataset is the first fully annotated dataset that in-
cludes the tenebrio molitor larvae insects for de-
tection/segmentation tasks at a large scale.
• The TenebrioVision dataset can address chal-
lenges associated with automated insect breeding
and production (Cadinu et al., 2020).
• It can also serve as a small object detection/seg-
mentation benchmark for researchers and indus-
try professionals for a variety of computer vision
tasks.
• Rich features learned by state-of-the-art mod-
els from the augmented TenebrioVision dataset,
proved to be substantial in real-case scenarios,
surpassing expert human-eye capabilities.
2 RELATED WORK
2.1 Insect Related Datasets
Popular datasets like ImageNet (Deng et al., 2009)
and COCO (Lin et al., 2014) that include different
classes of animals have been developed over the years
for a variety of computer vision tasks, such as im-
age classification and object detection - segmenta-
tion, respectively. The interest in building specialized
datasets that are only concerned with animal species
has grown in recent years. Datasets like iNaturalist
(Van Horn et al., 2018), which currently contains over
415,000 species of animals, Animal Kingdom dataset
(Ng et al., 2022) containing 850 species across 6 ma-
jor animal classes, and others (Beery et al., 2021;
Gagne et al., 2021; Cao et al., 2019) have a major con-
tribution to analyzing animal behavior. Some datasets
are devoted exclusively to one or a few animal species
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
188
Table 1: Comparison of various domain-specific datasets.
Task
Dataset Worm Images
Tenebrio molitor larvae
Images Classification Detection Segmentation
iNaturalist(Van Horn et al., 2018) 436,200 1,620 X - -
IP102(Wu et al., 2020) 6,850 - X X -
Larvae Dataset in roboflow(Probst, 2023) 179 179 -
X
No. instances: 179
-
Mealworms Dataset in roboflow(egg detection mixed eggs, 2022) 518 518 X
X
No. instances: 518
-
Multipurpose monitoring system(Majewski et al., 2022) 120 120 X X
X
No. instances: 1,026
TenebrioVision 1,120 1,120 - X
X
No. instances: 53,600
only (Wah et al., 2011; Fang et al., 2020; Labuguen
et al., 2021; Nuthalapati and Tunga, 2021)
Regarding solely insects, there are datasets like
(Van Horn et al., 2018; Hansen et al., 2020; Wu et al.,
2020) that include large amounts of insect images.
Yet, there have not been many attempts to study in-
sect datasets resembling tenebrio molitor worms in
the larvae stage, which is the nutrition-preferred one
as the ingredient for the EU foods. Efforts have been
made by (Hebert et al., 2021) to create synthetic im-
ages of worm posture, which would avoid the need for
human-labeled annotation. Other researchers (Hus-
son et al., 2018) and (Pereira et al., 2019) have de-
veloped tools for analyzing their pose and behavior.
However, due to the nature and characteristics of real
tenebrio-molitor worms, these approaches cannot be
effective in real-world schemes.
Furthermore, regardless of whether Tenebrio
molitor is present at its larvae stage or not, all of
the existing datasets contain a small amount of the
particular tenebrio molitor and are primarily used
for animal classification tasks. The development of
techniques for examining Tenebrio Molitor’s general
characteristics is severely hampered by this barrier.
Thus, the need for tenebrio molitor images for both
image detection and segmentation tasks emerges.
There are two small, yet preferable datasets regard-
ing tenebrio molitor worms in the larvae development
stage (egg detection mixed eggs, 2022) and (Probst,
2023). The first one classifies the images of live or
dead tenebrio molitor and also detects the worms.
Both of them can be found in Roboflow (Dwyer, ).
However, they feature only a limited sample of tene-
brio molitor images. These datasets are annotated
solely for object detection and typically showcase just
a single insect per frame, failing to represent authen-
tic farming conditions. In a recent paper (Majewski
et al., 2022), the authors made a multipurpose mon-
itoring system for Tenebrio molitor breeding. Tene-
brio molitor larvae, pupae, and beetles are all de-
tected by the instance segmentation module (ISM),
which also detects dead larvae and pests as anoma-
lies. From the acquired image, the semantic segmen-
tation module (SSM) extracted feed, chitin, and frass.
Additionally, the Larvae Phenotyping Module (LPM)
computes features for both the population as a whole
and each individual larva (length, curvature, mass,
segmentation, and classification). However, due to
the difficult process of annotation and the need for
a multipurpose monitoring system, they present only
120 total labeled images, including 1026 live tenebrio
molitor larvae instances among others. These images
do not all contain the tenebrio molitor insect in the
larval stage. Also, these images are not publicly avail-
able.
A comparison of the aforementioned domain-
specific datasets is presented in table 1. For each
dataset, the total number of worm images, the total
number of tenebrio molitor worm images and the pur-
pose that this dataset accomplishes(classification, de-
tection, segmentation) are provided. It is shown that
even though there are large datasets that contain many
worm images (iNaturalist (Van Horn et al., 2018),
IP102 (Wu et al., 2020)) there is a limited number
of tenebrio molitor images on the larvae development
stage. On top of that, all these datasets either contain
limited (Majewski et al., 2022) or no data at all for the
segmentation task.
Given the aforementioned factors, it becomes ev-
ident that a direct and equitable comparison between
these datasets and TenebrioVision, in terms of perfor-
mance, is not feasible.
TenebrioVision: A Fully Annotated Dataset of Tenebrio Molitor Larvae Worms in a Controlled Environment for Accurate Small Object
Detection and Segmentation
189
2.2 Vision Based Methods for Insect
Analysis
Large strides have been made in the field of object de-
tection in images, particularly with algorithms based
on deep learning, which are typically divided into
two categories: Two-stage detectors (methods based
on the region proposal network), like Faster R-CNN
(Girshick, 2015) and Mask R-CNN (He et al., 2017),
and one-stage detectors like YOLO (Redmon et al.,
2016), SSD (Liu et al., 2016).
Various models such as Mask R-CNN (He et al.,
2017) and YOLO-V5 (Jocher, 2020) have been ex-
plored by researchers for the detection and segmen-
tation of worms (Majewski et al., 2022). However,
given the specific requirements of accuracy and rapid
inference time in the context of insect farms, an exten-
sive evaluation of five state-of-the-art baseline mod-
els is conducted in the TenebrioVision dataset. These
models included Mask R-CNN (He et al., 2017), Ef-
ficientDet (Tan et al., 2020), YOLO-V7 (Wang et al.,
2022), YOLO-V8 (Jocher et al., tics) and the current
state-of-the-art YOLO-NAS (Aharon et al., 2021).
3 TenebrioVision DATASET
Detailed information about the TenebrioVision
dataset, which comprises a large collection of high-
quality images of Tenebrio molitor larvae worms in
various poses and orientations are discussed in detail
in this section.
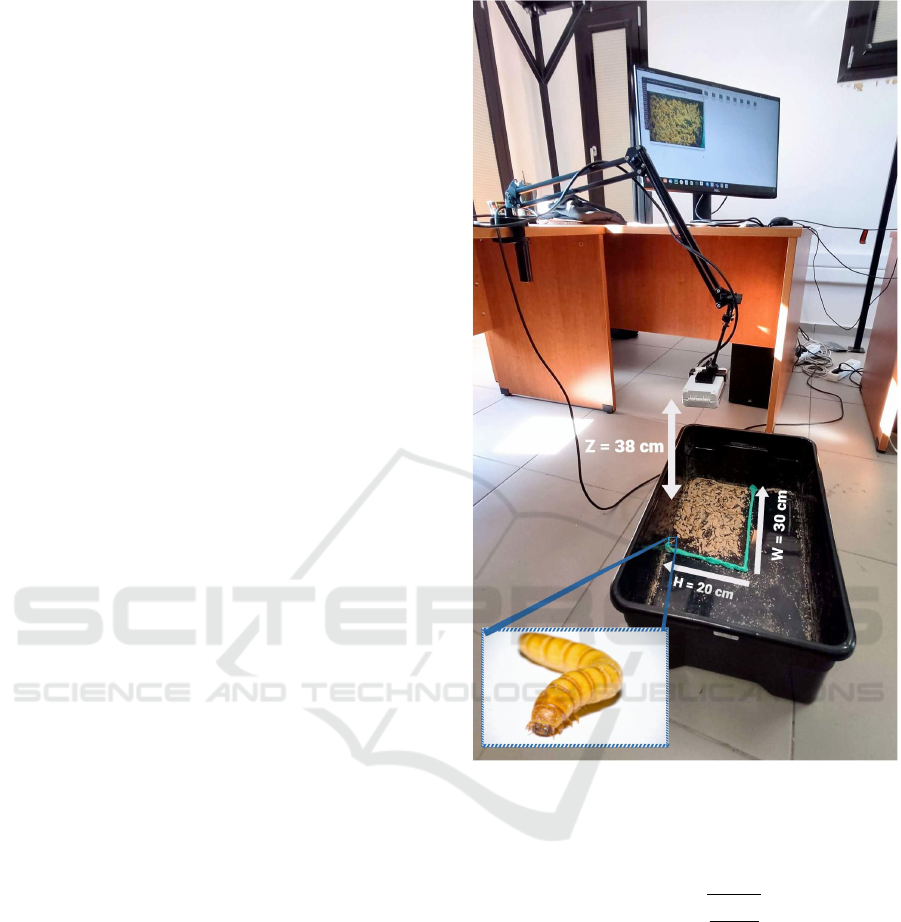
3.1 Experimental Setup
The TenebrioVision dataset is collected using a
custom-designed setup consisting of a crate in a con-
trolled environment and a UI-3884LE-C-HQ camera
(UI-3884LE, 2021) placed above it. The UI camera is
chosen because it offers 3088 x 2076 pixel resolution
at frame rates up to 58.0 fps even under low-light con-
ditions and the focus can be conveniently adjusted.
The tenebrio molitor worms are placed inside a crate
with a spatial field of view of 20cm x 30cm, which
is exactly a quarter of the crate’s spatial field of view,
as it is presented in figure 2. The quarter of the crate,
as a spatial field of view, of the UI camera was cho-
sen experimentally in order to capture the 3088x2076
pixel resolution. By taking into account the following
equation (1) from (Fulton, 2015), it is concluded that
38 cm is the ideal height to set the camera from the
crate:
Figure 2: Experimental setup. The UI camera is placed at a
38 cm distance from the black crate, according to Equation
1. The spatial field of view is 20 x 30 cm. The camera is
steadily placed on the desk during the whole experimental
procedure.
D(cm) =
r
Q × F
H
(1)
where D is the camera’s distance from the crate
in cm, Q is the Quarter crate’s size: 20cm x 30cm,
F is the Focal length of the camera: 9.6 mm and the
H is the Object height on the sensor, which is actu-
ally the optical size of the camera sensor: 7.411mm
x 4.982mm according to UI-3884LE-C-HQ specifica-
tions (UI-3884LE, 2021).
3.2 Dataset Acquisition
The Tenebrio molitor larvae worms are placed inside
the crate and allowed to move freely for a few seconds
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
190
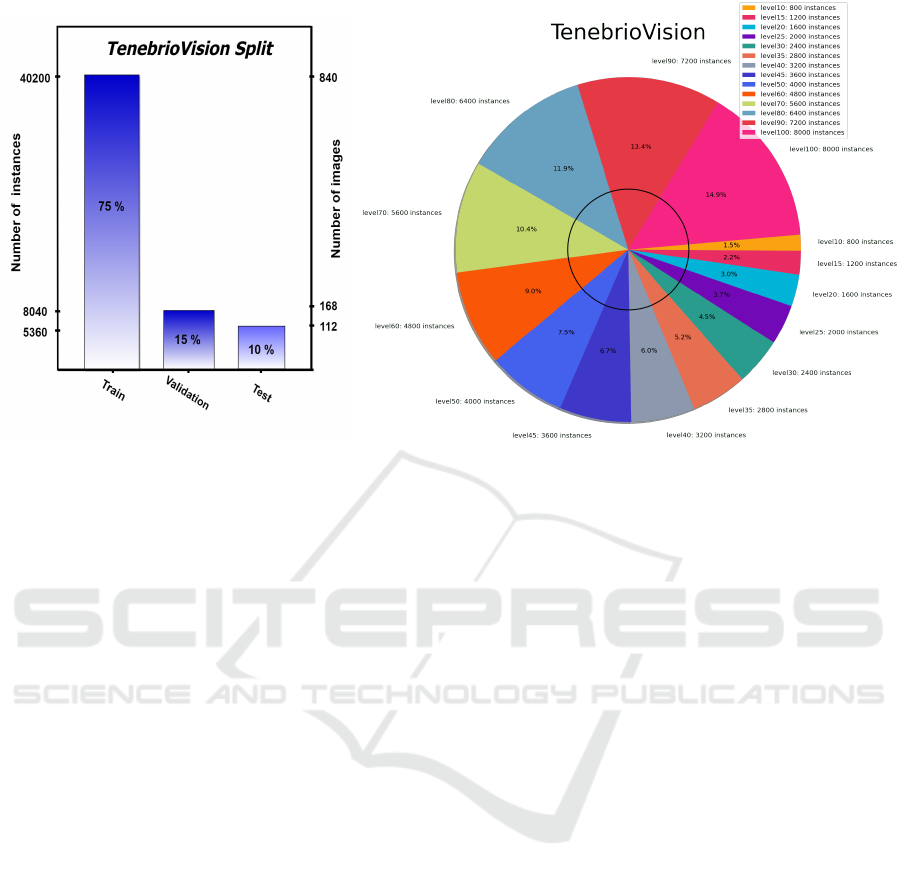
(a) (b)
Figure 3: TenebrioVision dataset statistics. (a) Train, validation and test split of TenebrioVision dataset with respect to both
the total number of instances and the total number of images. (b) This pie - chart portrays the distribution of TenebrioVision’s
levels among the entire dataset.
while being captured by the UI camera. More partic-
ularly, a 30-second video is recorded and processed
to only obtain the first and last frames. This choice is
made because worm position and orientation between
the first and last images are likely to differ signifi-
cantly ensuring that there are no identical images in
the dataset, thus providing no bias. When the desired
number of images has been obtained, the process is
complete.
In order to capture the ground truth illumination
inside the crate, which is crucial for accurately repre-
senting the colors of the worms, the specifications of
the UI camera are modified. Specifically, the sensi-
tivity is increased and the white balance settings are
adjusted for the purpose of capturing the true colors
of the larvae.
In order to guarantee that only live Tenebrio moli-
tor larvae are included in the dataset throughout the
experimental process, the worm specimens are con-
sistently provided with adequate nutrition and temper-
ature control. This procedure enables the collection of
rich, representative data so that the deep learning ap-
proaches will learn features associated only with live
tenebrio molitor worms.
The captioning framework is initialized after the
camera setup. In order to have a balanced distribution
of the images across the dataset, 14 levels are formed,
according to the number of worms inside each image.
Each level contains 80 images. There are 14 levels:
10, 15, 20, 25, 30, 35, 40, 45, 50, 60, 70, 80, 90, and
100 as it is demonstrated in the figure 4. In essence,
level 45 has 80 images, and each image includes 45
worm instances. Figure 3b depicts the proportion of
each level to the total number of worm instances in the
TenebrioVision dataset. In total, the TenebrioVision
dataset includes 1,120 images, and each image has a
resolution of 6 Megapixels.
3.3 Dataset Annotation
Annotation is performed using Datatorch (Nguyen,
2020) by drawing precise segmentation masks cov-
ering each tenebrio molitor worm in all frames. Tene-
brio molitor larvae’s high level of articulation and po-
tential occlusion in crowded environments lead to an
increased annotation effort. Without accounting for
the overhead, annotating 1,120 images with segmen-
tations masks and bounding boxes for the TenebrioVi-
sion dataset took more than 373 human hours of an-
notation time. The dataset is publicly available here:
https://vcl.iti.gr/dataset/TenebrioVision/.
3.4 Dataset Split
TenebrioVision. To enable the reproduction of the
experimental results, a 75:15:10 split is followed, for
the training, validation, and test set, respectively, as
shown in figure 3a.
TenebrioVision: A Fully Annotated Dataset of Tenebrio Molitor Larvae Worms in a Controlled Environment for Accurate Small Object
Detection and Segmentation
191

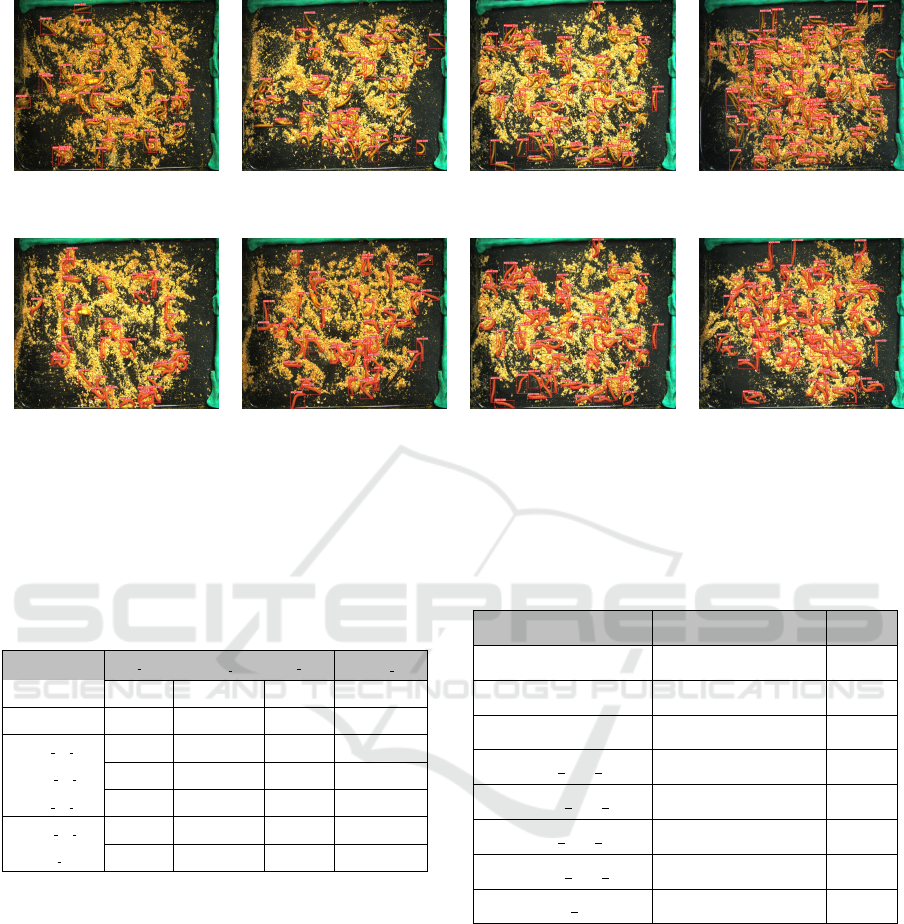
(a) level 10 (b) level 15 (c) level 20 (d) level 25
(e) level 30 (f) level 35 (g) level 40 (h) level 45
(i) level 50 (j) level 60 (k) level 70 (l) level 80
(m) level 90 (n) level 100
Figure 4: Levels of the TenebrioVision dataset. There are 14 levels. The numerical value assigned to each level indicates the
cumulative count of tenebrio molitor worm instances captured in the corresponding images at that level. Each level has 80
images, totaling 1,120 images. For example, we have 80 images for level 90, and every image at level 90 contains only 90
tenebrio monitor worms.
4 EXPERIMENT AND
EVALUATION
In this section, the performance of TenebrioVision
dataset is evaluated on various state-of-the-art object
detection and instance segmentation models. The im-
ages in the training set are resized to each baseline
setup, always trying, if possible, to maintain the as-
pect ratio of 6 Megapixels. The performance of each
model is evaluated based on mean average precision
(mAP), inference time, and memory allocation. These
evaluation metrics are chosen because they are essen-
tial indicators of the final product’s quality in auto-
mated farming. Finally, a qualitative evaluation of
images provided by real insect farms is presented. All
experiments are conducted on the NVIDIA GeForce
RTX 3090 GPU with 24GB memory.
4.1 Quantitative Evaluation
The five baselines baseline models used are Mask R-
CNN (He et al., 2017), EfficientDet (Tan et al., 2020),
YOLO-V7 (Wang et al., 2022) and YOLO-V8 (Jocher
et al., tics) for both object detection (OD) and instance
segmentation (IS) tasks and the YOLO-NAS (Aharon
et al., 2021). Mask R-CNN is conducted using the
Detectron2 (Wu et al., 2019) framework. Detectron2
is preferred over the original implementation (Mat-
terport Mask R-CNN (Abdulla, 2017)) due to its im-
proved performance and flexibility. The implementa-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
192
(a) object detection for a
level 35 image
(b) object detection for a
level 50 image
(c) object detection for a
level 70 image
(d) object detection for a
level 100 image
(e) instance segmentation
for a level 40 image
(f) instance segmentation for
a level 45 image
(g) instance segmentation
for a level 70 image
(h) instance segmentation
for a level 80 image
Figure 5: Experiment results on TenebrioVision’s dataset test set. On top, there are predictions regarding object detection
on different levels of the dataset, and below there are predictions regarding instance segmentation on different levels of the
dataset.
Table 2: Detection and segmentation results on the test set
of TenebrioVision using different state-of-the-art models.
We evaluate the mAP@0.5:0.05:0.95 and mAP@0.75 for
the bounding box and the mask. Empty objects on the table
indicates that the model performs only object detection.
Methods mAP bbox
mAP@75 bbox
mAP mask
mAP@75 mask
Mask RCNN 0.781 0.954 0.654 0.776
EFFICIENTDET 0.787 0.926 - -
YOLO V7 OD 0.842 0.93 - -
YOLO V7 IS 0.848 0.93 0.632 0.802
YOLO V8 OD 0.874 0.96 - -
YOLO V8 IS 0.88 0.965 0.729 0.83
YOLO NAS 0.892 0.972 - -
tion of the other baselines is taken from their official
repositories.
For each method, the smallest backbone version
of the model is used. For Mask R-CNN the backbone
is Resnet-50-FPN, for EfficientDet the EfficientDet-
D0, for Yolov7-(OD) the yolov7-tiny, for Yolov7-
(IS) yolov7-seg, for yolov8-(OD) the yolov8n, for
Yolov8-(IS) yolov8n-seg and finally for Yolo-NAS
the YOLO-NAS-s. The reason that the largest back-
bones of those baselines are not employed is twofold:
firstly, there is no discernible difference in the output
mAP, and secondly, inference time decreases. A basic
augmentation scheme is followed for these baselines.
The basic augmentations are Horizontal and Vertical
flips. For Mask R-CNN and Yolo-V7 the training im-
Table 3: Comparison of memory allocation in Giga-
bytes(GBs) and inference time (FPS) during the testing
phase on several state-of-the-art models.
Methods Memory(GBs) FPS
Faster R-CNN 2.27 20
Mask R-CNN 5.06 9
EfficientDet 1.75 25
YOLO V7 OD 2.37 220
YOLO V7 IS 3.44 40
YOLO V8 OD 1.59 150
YOLO V8 IS 2.12 80
YOLO NAS 1.48 416
age has a 1024 x 688 resolution with respect to the
camera’s aspect ratio. For EfficientDet the training
image size is 512 x 512 in order to get the small-
est EfficientDet version (EfficientDet-D0). Finally,
the training image size for Yolo-V8 and Yolo-NAS
is 1280 x 1280.
The results are presented in table 2, where the
mAP scores for all methods tested are presented. In
table 3 the memory allocation and the inference time
of each method are reported. The memory allocation
refers to the Gigabytes (GBs) required to infer an im-
age from the TenebrioVision dataset and the inference
time to the frames per second (FPS). The optimal per-
TenebrioVision: A Fully Annotated Dataset of Tenebrio Molitor Larvae Worms in a Controlled Environment for Accurate Small Object
Detection and Segmentation
193
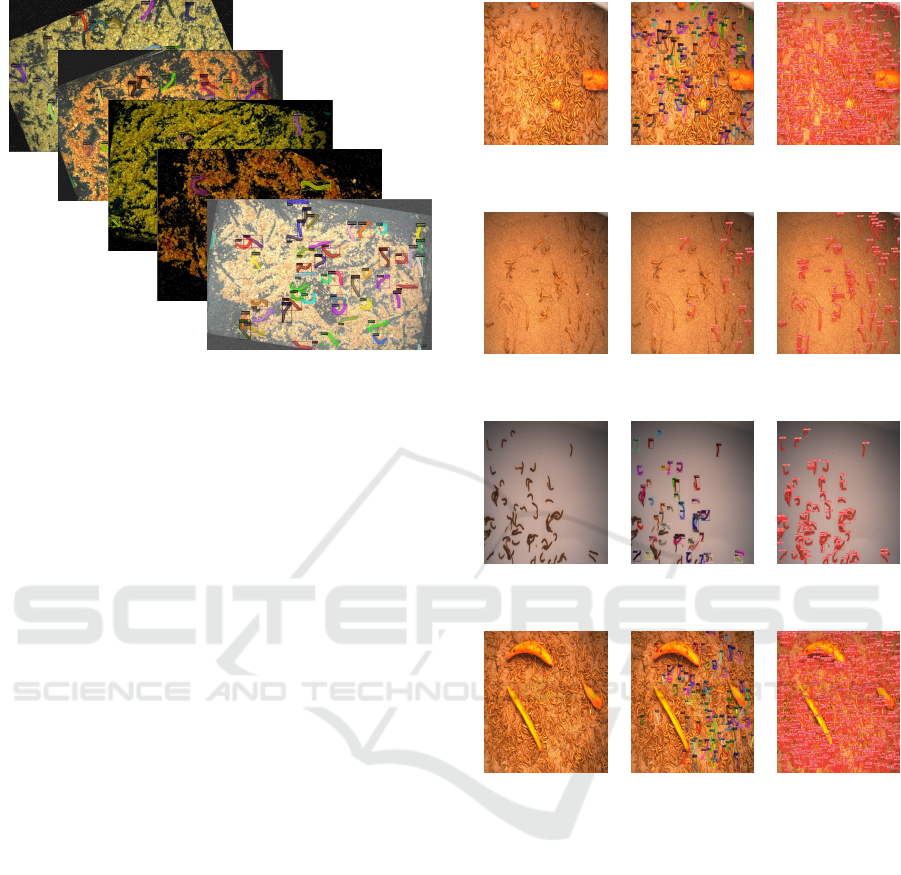
Figure 6: Extended augmentation scheme for TenebrioVi-
sion dataset. The applied augmentations are horizontal-
vertical flips, random rotation, adding noise, zooming-in,
brightness, and exposure. The annotated segmentation
masks are also presented.
formance is achieved using the current SoTA Yolo-
V8(IS) (Jocher et al., tics) with a mAP of 0.729 for the
segmentation mask and the Yolo-NAS (Aharon et al.,
2021) with a mAP of 0.892 for the bounding box, both
evaluated at IoU=0.5:.05:0.95. Considering the infer-
ence time, the YOLO-NAS model exhibits the low-
est memory allocation of 1.48 GB for object detec-
tion, while YOLO-V8 (IS) requires 2.12 GB for the
instance segmentation task. Additionally, the highest
FPS values of 416 and 80 for detection and segmenta-
tion tasks are attained by Yolo-NAS and Yolo-V8(IS)
respectively, on the TenebrioVision dataset.
4.2 Qualitative Evaluation
Some experimental results regarding object detection
and instance segmentation can be seen in figure 5.
This figure clearly shows that small and highly articu-
lated objects like those of tenebrio molitor can be ac-
curately detected. A precise segmentation mask can
provide a wealth of information about these worms.
Information like color, length, width and size of the
tenebrio molitor larvae can help experts gain knowl-
edge about the health and life cycle of each worm.
This analysis is really vital for farm workers as it
saves them a lot of time when trying to figure out if
a crate filled with worms is healthy or unhealthy in a
production pipeline scheme. These data will aid the
competent scientific community and hasten the breed-
ing of insects for insect farming.
Further evaluation of the models is conducted on
actual farm images, which contain only tenebrio moli-
tor worms at the larvae stage. It is found that even
(a) Ground Truth (b) Basic Aug-
mentations
(c) Extended
Augmentations
(d) Ground Truth (e) Basic Aug-
mentations
(f) Extended
Augmentations
(g) Ground Truth (h) Basic Aug-
mentations
(i) Extended
Augmentations
(j) Ground Truth (k) Basic Aug-
mentations
(l) Extended
Augmentations
Figure 7: Expreriments conducted on real farm images. The
left column depicts the Ground Truth farm images, the cen-
ter column the predictions of the SoTA models, trained on
TenebrioVision with Basic Augmentations, and the right
column the prediction of the SoTA models, trained on Tene-
brioVision with an extended augmentation scheme.
though the current SoTA baseline methods achieved
a satisfying mAP at the test set, their performance
on real farm images is poor and inadequate as it is
demonstrated in figure 7 (center column). Genuine
farm images, in contrast to TenebrioVision, show a
significant amount of Tenebrio molitor larvae inside
the inspection crates, frequently beyond the limit of
human counting capacity. Real farm images typically
have a range of backgrounds, colors, camera angles,
and many other aspects. To tackle this problem the
best models are trained with an extended augmenta-
tion scheme. More specifically, these augmentations
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
194

are horizontal-vertical flips, random rotation, adding
noise, zooming-in and out, brightness, and exposure.
The noise augmentation technique applies a Gaus-
sian distribution to 8% of the pixels in each image.
Samples from this extended augmentation scheme are
demonstrated in figure 6. The results from this ex-
tended augmentation scheme are fascinating, as seen
in figure 7 (right column), since YOLO-V8(IS) now
detects and captures a very large amount of tenebrio
molitor larvae worms, that are even uncountable by
an expert’s human eye.
It is believed that the process of inference on real
images and adding them back to the TenebrioVision
will further improve the detection/segmentation tasks,
and enhance the automation process of the farms.
5 CONCLUSIONS
In this paper, TenebrioVision was introduced, a
dataset that contains tenebrio molitor worms in
the larvae development stage. The TenebrioVision
dataset contains 1,120 fully annotated images for de-
tection and segmentation tasks, at a resolution of
3088x2076 pixels. The total number of worm in-
stances is 53,600. The performance of several state-
of-the-art object detection and instance segmentation
models was evaluated on TenebrioVision. The exper-
iments’ findings demonstrate that, despite the SoTA
algorithms’ robustness, they perform poorly in real-
world situations, necessitating augmentations. By ex-
tending TenebrioVision with augmentations, aston-
ishing results were achieved, surpassing the expert
human-eye detection accuracy. By making Tenebri-
oVision publicly available our aim is to assist and en-
hance the automation process on real farms, thus help-
ing the scientific community produce valuable data
and knowledge on this high-nutrition worm. This
dataset can also be utilized, by the computer vision
community, as a benchmark for small object detec-
tion and segmentation tasks.
ACKNOWLEDGMENTS
The work presented in this paper was supported by
the European Commission under contract H2020 -
101016953 CoRoSect.
REFERENCES
Abdulla, W. (2017). Mask r-cnn for object detection and
instance segmentation on keras and tensorflow. https:
//github.com/matterport/Mask RCNN.
Aharon, S., Louis-Dupont, Ofri Masad, Yurkova, K., Lotem
Fridman, Lkdci, Khvedchenya, E., Rubin, R., Bagrov,
N., Tymchenko, B., Keren, T., Zhilko, A., and Eran-
Deci (2021). Super-gradients.
Beery, S., Agarwal, A., Cole, E., and Birodkar, V. (2021).
The iwildcam 2021 competition dataset. arXiv
preprint arXiv:2105.03494.
Brandon, A. M., Garcia, A. M., Khlystov, N. A., Wu, W.-
M., and Criddle, C. S. (2021). Enhanced bioavailabil-
ity and microbial biodegradation of polystyrene in an
enrichment derived from the gut microbiome of tene-
brio molitor (mealworm larvae). Environmental sci-
ence & technology, 55(3):2027–2036.
Cadinu, L. A., Barra, P., Torre, F., Delogu, F., and Madau,
F. A. (2020). Insect rearing: Potential, challenges, and
circularity. Sustainability, 12(11):4567.
Cao, J., Tang, H., Fang, H.-S., Shen, X., Lu, C., and Tai, Y.-
W. (2019). Cross-domain adaptation for animal pose
estimation. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 9498–
9507.
Costa, S., Pedro, S., Lourenc¸o, H., Batista, I., Teixeira, B.,
Bandarra, N. M., Murta, D., Nunes, R., and Pires, C.
(2020). Evaluation of tenebrio molitor larvae as an
alternative food source. NFS journal, 21:57–64.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
Desa, U. (2019). World population prospects 2019: High-
lights. New York (US): United Nations Department for
Economic and Social Affairs, 11(1):125.
Dwyer, B., N. J. . S. J. e. a. R. V. . S. A. f. u.
egg detection mixed eggs (2022). Mealworms-
detection dataset. https://universe.roboflow.com/
egg-detection-mixed-eggs/mealworms-detection.
visited on 2023-02-23.
Fang, C., Zhang, T., Zheng, H., Huang, J., and Cuan, K.
(2020). Pose estimation and behavior classification of
broiler chickens based on deep neural networks. Com-
put. Electron. Agric., 180:105863.
Fulton, W. (2015). Calculate distance or size of an object
in a Photo Image. https://www.scantips.com/lights/
subjectdistance.html.
Gagne, C., Kini, J., Smith, D., and Shah, M. (2021).
Florida wildlife camera trap dataset. arXiv preprint
arXiv:2106.12628.
Ghaly, A. E., Alkoaik, F., et al. (2009). The yellow meal-
worm as a novel source of protein. American Jour-
nal of Agricultural and Biological Sciences, 4(4):319–
331.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Grau, T., Vilcinskas, A., and Joop, G. (2017). Sustain-
able farming of the mealworm tenebrio molitor for the
production of food and feed. Zeitschrift f
¨
ur Natur-
forschung C, 72(9-10):337–349.
Hansen, O. L., Svenning, J.-C., Olsen, K., Dupont, S.,
Garner, B. H., Iosifidis, A., Price, B. W., and Høye,
TenebrioVision: A Fully Annotated Dataset of Tenebrio Molitor Larvae Worms in a Controlled Environment for Accurate Small Object
Detection and Segmentation
195

T. T. (2020). Species-level image classification with
convolutional neural network enables insect identifi-
cation from habitus images. Ecology and Evolution,
10(2):737–747.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Hebert, L., Ahamed, T., Costa, A. C., O’Shaughnessy,
L., and Stephens, G. J. (2021). Wormpose: Image
synthesis and convolutional networks for pose esti-
mation in c. elegans. PLoS computational biology,
17(4):e1008914.
Husson, S. J., Costa, W. S., Schmitt, C., and Gottschalk, A.
(2018). Keeping track of worm trackers. WormBook:
The Online Review of C. elegans Biology [Internet].
Jocher, G. (2020). YOLOv5 by Ultralytics.
Jocher, G., Chaurasia, A., and Qiu, J. (2023., {https://
github.com/ultralytics/ultralytics}). Yolo by ultralyt-
ics.
Kr
¨
oncke, N. and Benning, R. (2022). Self-selection of feed-
ing substrates by tenebrio molitor larvae of different
ages to determine optimal macronutrient intake and
the influence on larval growth and protein content. In-
sects, 13(7):657.
Labuguen, R., Matsumoto, J., Negrete, S. B., Nishimaru,
H., Nishijo, H., Takada, M., Go, Y., Inoue, K.-i., and
Shibata, T. (2021). Macaquepose: a novel “in the
wild” macaque monkey pose dataset for markerless
motion capture. Frontiers in behavioral neuroscience,
14:581154.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In Computer Vision–ECCV 2016:
14th European Conference, Amsterdam, The Nether-
lands, October 11–14, 2016, Proceedings, Part I 14,
pages 21–37. Springer.
Majewski, P., Zapotoczny, P., Lampa, P., Burduk, R., and
Reiner, J. (2022). Multipurpose monitoring system
for edible insect breeding based on machine learning.
Scientific Reports, 12(1):1–15.
Ng, X. L., Ong, K. E., Zheng, Q., Ni, Y., Yeo, S. Y., and
Liu, J. (2022). Animal kingdom: A large and di-
verse dataset for animal behavior understanding. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
19023–19034.
Nguyen, M. (2020). Datatorch annotation tool. https:
//datatorch.io/.
Nuthalapati, S. V. and Tunga, A. (2021). Multi-domain few-
shot learning and dataset for agricultural applications.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision, pages 1399–1408.
of the European Union, O. J. (2023). Commission im-
plementing regulation (eu) 2023/58. https://eur-lex.
europa.eu/eli/reg impl/2023/58/oj. Official Journal of
the European Union, 66.
Oonincx, D. G. and De Boer, I. J. (2012). Environmental
impact of the production of mealworms as a protein
source for humans–a life cycle assessment. PloS one,
7(12):e51145.
Pereira, T. D., Aldarondo, D. E., Willmore, L., Kislin,
M., Wang, S. S.-H., Murthy, M., and Shaevitz, J. W.
(2019). Fast animal pose estimation using deep neural
networks. Nature methods, 16(1):117–125.
Probst, A. (2023). larvae dataset. https://universe.
roboflow.com/andre-probst-egt9g/larvae-bbsvy. vis-
ited on 2023-02-23.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Siemianowska, E., Kosewska, A., Aljewicz, M., Skib-
niewska, K. A., Polak-Juszczak, L., Jarocki, A., and
Jedras, M. (2013). Larvae of mealworm tenebrio moli-
tor l. as european novel food.
Stoops, J., Crauwels, S., Waud, M., Claes, J., Lievens, B.,
and Van Campenhout, L. (2016). Microbial commu-
nity assessment of mealworm larvae (tenebrio moli-
tor) and grasshoppers (locusta migratoria migratori-
oides) sold for human consumption. Food Microbiol-
ogy, 53:122–127.
Tan, M., Pang, R., and Le, Q. V. (2020). Efficientdet: Scal-
able and efficient object detection. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 10781–10790.
UI-3884LE (2021). Ids. ui-3884le-c-hq camera (ab00979).
https://en.ids-imaging.com/IDS/datasheet pdf.php?
sku=AB00979.
Van Horn, G., Mac Aodha, O., Song, Y., Cui, Y., Sun,
C., Shepard, A., Adam, H., Perona, P., and Belongie,
S. (2018). The inaturalist species classification and
detection dataset. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 8769–8778.
Van Huis, A., Van Itterbeeck, J., Klunder, H., Mertens, E.,
Halloran, A., Muir, G., and Vantomme, P. (2013). Ed-
ible insects: future prospects for food and feed secu-
rity. Number 171. Food and agriculture organization
of the United Nations.
Wah, C., Branson, S., Welinder, P., Perona, P., and Be-
longie, S. (2011). The caltech-ucsd birds-200-2011
dataset.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2022).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. arXiv preprint
arXiv:2207.02696.
Wu, X., Zhan, C., Lai, Y.-K., Cheng, M.-M., and Yang,
J. (2020). Ip102: A large-scale benchmark dataset
for insect pest recognition. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 8787–8796.
Wu, Y., Kirillov, A., Massa, F., Lo, W.-Y., and Gir-
shick, R. (2019). Detectron2. https://github.com/
facebookresearch/detectron2.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
196
