
Investigation of Workforce Dynamical Behaviour from a Phase Plane
Perspective
Timo Lahteenmaa-Swerdlyk and Franc¸ois-Alex Bourque
Centre for Operational Research and Analysis, Development Research and Defence Canada,
Keywords:
Differential Equation, Mentee, Mentor, Mentoring, Population Dynamics, Population Model.
Abstract:
The purpose of this work was to investigate the population dynamics of on-the-job training. The ratio of
mentees to mentors was considered, and its effect on overwhelming (saturating) the training system was anal-
ysed when undergoing a growth phase between two healthy states. This analysis was completed by analytically
solving a simplified continuous model of the problem with constant input parameters. The model was investi-
gated through a phase-plane interpretation, or the mentee versus mentor population as the system evolves. The
key input parameter of the analysis was the saturation limit: the ratio of mentees to mentors above which the
system becomes saturated. This value can be modified by adjusting various factors such as the quality, quan-
tity, and/or the delivery method of the training. Of special interest was the time for the system to evolve as the
saturation limit was varied. It was discovered that the system behaviour can fall into three categories based on
its value. If the saturation limit is very low, the system will remain saturated and never reach a steady state. If
the threshold is very high, the system will remain unsaturated (healthy) and reach steady state at inputted target
populations, albeit in a relatively slow timeframe. Finally, for a particular middle range of values, the system
will reach steady state at inputted target populations in an optimal time by crossing into and out of saturation.
Therefore, finding the optimal values for the input parameters will depend on a compromise between reaching
the target state quickly and not exceeding the target population levels, which will depend on the priorities of
the organization. Given that any occupation with on-the-job training could experience such effects during a
transition, understanding the dynamics of saturation is thus essential to design an efficient training system.
1 INTRODUCTION
An important aspect of professional development is
on-the-job training. For military occupations such
as aircraft technicians (Bourque, 2019), this pro-
cess is formalized as a progression where appren-
tices (mentees) receive training under the supervision
of journeymen (mentors) before becoming mentors
themselves. Crucial to maintaining a healthy sys-
tem is the ratio of mentees to mentors: A low ratio
means that there are enough mentors to train all the
mentees present, and the system is in a healthy state.
However, too high a ratio causes the mentor popula-
tion to become taxed, potentially affecting their pri-
mary duties as well as stall the progression of the
mentees, as many are unable to be trained effectively.
While this scenario is usually avoided when the sys-
tem already possesses healthy population sizes, such
an event may occur when the system transitions be-
tween two healthy states. In practice, this satura-
tion effect may occur for any occupation undergoing a
transition with an on-the-job training component. For
example, in the case of a transition to a new aircraft,
the growth of the technician population able to main-
tain this new aircraft may be limited due to the lack of
journeymen able to supervise apprentices. Because of
this example and others, understanding the dynamics
of the saturation effect is important.
(Bastian and Hall, 2020) gives an excellent
overview of applied methods to perform military
workforce planning and modelling. Given the cou-
pled relationships present in on-the-job training sce-
narios and their associated complexities, discrete-
event simulations are the most common method of
analysing these systems (Novak et al., 2015; Zais and
Zhang, 2015; Henderson and Bryce, 2019). Another
common approach is to utilize industrial system dy-
namics (Forrester, 1965), which visualizes the con-
tinuous feedback loops, upwards flow, and interac-
tion within these training structures (S
´
eguin, 2015).
Lahteenmaa-Swerdlyk, T. and Bourque, F.
Investigation of Workforce Dynamical Behaviour from a Phase Plane Perspective.
DOI: 10.5220/0012270900003639
Paper copyright by his Majesty the King in Right of Canada as represented by the Minister of National Defence
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 35-46
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
35

However, these structures are often difficult to inves-
tigate due to their highly coupled nature. To allevi-
ate these issues, differential equations (Boileau, 2012;
Diener, 2018) and other statistical models (Bryce and
Henderson, 2020; Okazawa, 2020) are used to inves-
tigate simplified setups to verify the system dynam-
ics. However, this analysis is generally completed
with the populations already at a healthy state as this
greatly simplifies the equations which are used (Di-
ener, 2018; Vincent and Okazawa, 2019). In prac-
tice, many key decisions must be made during transi-
tions between healthy states and these situations must
be analysed accordingly. To consider this, (Schaffel
et al., 2021) utilized a set of simplified differential
equations which is based on a predator-prey model
(Swift, 2002). This consists of a two-state model
which considers time-variable saturation effects on
the training rate of mentees as the mentor population
evolves. (Schaffel et al., 2021) investigated the sys-
tem using a benchmark scenario and applied it to a
Discrete Event Simulation. However, a deeper anal-
ysis of the governing equations are required to fully
understand its system dynamics and its application to
a realistic training scenario.
The aim of this paper is to analytically solve
and investigate this continuous two-state population
model by looking at its phase plane. The model fo-
cuses on an application to the training of aircraft tech-
nicians, which is its intended use. A benchmark sce-
nario is first used as a backdrop to understand the sys-
tem behaviour as input parameters are adjusted, be-
fore investigating its analytical solutions. Special at-
tention is put into optimally reducing the time to reach
desired healthy populations. The remainder of this pa-
per is organized as follows. In Section 2, the system
of equations governing the upgrade process is intro-
duced, along with a benchmark scenario. Section 3
gives an overview of the system dynamics by plotting
numerical solutions of the benchmark scenario. Sec-
tion 4 then provides a more in-depth explanation of
the observations made in Section 3 by solving the in-
dividual training regimes and investigating their vari-
ous properties. The settling time is defined and inves-
tigated in Section 5. Finally, in Section 6 two mathe-
matical proofs are completed to explain the behaviour
observed in Section 5.
2 MODEL FORMULATION
In this section, the system of equations which governs
the upgrading process of mentees to mentors is for-
mally introduced. In Section 2.1, the system of dif-
ferential equations governing the upgrading process
is stated. In Section 2.2, a benchmark scenario is in-
troduced to provide a base system for which we can
begin the analysis.
2.1 Model Introduction
From (Schaffel et al., 2021), the system of equations
to model the upgrade process is shown in Eqn. (1) and
Eqn. (2). The equations take the form of a modified
predator-prey model (Swift, 2002).
˙x = a −bmin(x,ry), (1)
˙y = bmin(x,ry) − cy, (2)
where x and y denote the mentee and mentor popula-
tions respectively, a is the intake rate of mentees into
the system; b is the healthy upgrade rate of mentees
to mentors, mentees requiring an average of 1/b time
units of mentoring before being upgraded; r is the sat-
uration limit, denoting the minimum number of men-
tors required to train one mentee; and c is the attrition
rate of mentors. To define the variable upgrade rate of
mentees, two possible regimes were considered:
1. The system is in the unsaturated training regime if
the ratio of mentees to mentors is less than the sat-
uration limit (x < ry), and there are enough men-
tors to train the entire pool of mentees in the sys-
tem. Therefore, the mentees upgraded at the nor-
mal rate (bx).
2. The system is in the saturated training regime if
the ratio of mentees to mentors is greater than
the saturation limit (x > ry), and there are no
longer enough mentors to train the entire pool of
mentees in the system. Therefore, the progression
of mentees to mentors is now limited to the number
of mentors, who can either spread their training out
equally among the pool of mentees, or focus their
training on a specific quantity of mentees up to the
value of the saturation limit. In either case, the rate
mentees upgrade to mentors is now bry.
In this system, it is assumed that the attrition rate (c)
may not be able to be readily changed, as mentors
generally leave the system due to retirements. How-
ever, the intake (a) and upgrade rates (b), as well
as the saturation limit (r), are controllable by adjust-
ing the quantity, quality, and delivery method of the
training, among other factors. Modifying these val-
ues may adjust the time required to transition between
two healthy states or add additional stress to the sys-
tem if the ratio of mentees to mentors becomes too
high. At the steady state, the rate of change of both
populations ( ˙x, ˙y) are equal to zero in the unsaturated
(healthy) regime, giving the relation:
a = bx
f
= cy
f
, (3)
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
36

where x
f
and y
f
denote the number of mentees and
mentors respectively in the target steady state. Since
the intake, upgrade, and attrition rates are tied to
the target population values, adjusting any of these
parameters will move the steady state values of the
mentee and mentor populations away from their in-
tended target populations. By fixing the attrition rate,
the intake and upgrade rates are calculated to reach
the intended target populations.
This will leave the saturation limit as the sole in-
dependent variable, of which its effect on the system
will be the primary focus of this paper. Finally, we
are intrested in the case when the target mentor pop-
ulation is greater than the target mentee population
(y
f
> x
f
). From Eqn. (3), this restriction results in
the upgrade rate being greater than the attrition rate
(b > c).
2.2 Benchmark Scenario
In the benchmark scenario, the mentee and mentor
populations will undergo a growth, transitioning from
an initial state (x
0
,y
0
) to a target steady state (x
f
,y
f
)
where the populations are doubled. The values chosen
are representative of an application to the training of
aircraft technicians. Specifically, the input parameters
are set to the following values:
(x
0
,y
0
) = (25,100)
(x
f
,y
f
) = (50,200)
c = 0.05
As discussed in Section 2.1, the intake (a) and up-
grade (b) rates are calculated to reach the target pop-
ulations:
a = cy
t
= 10
b =
a
x
t
= 0.2
From the defined values, 10 mentees enter the system
on average each time unit, and each mentee requires
an average of 5 time units of training before upgrading
to a mentor when the system is healthy. A mentor then
stays in the system for an average of 20 time units
before exiting the pool.
3 SYSTEM DYNAMICS UNDER
THE BENCHMARK SCENARIO
To gain an initial understanding of the system dy-
namics, the system was numerically solved using
the fourth-order Runge-Kutta (RK-4) method. Phase
plane solutions of the benchmark scenario were plot-
ted as the saturation limit (r), the one independent
variable, was varied.
To break up the solutions to the system, we note
from Eqn. (1) and Eqn. (2) that the unsaturated region
is not dependent on r, so the changes in the system
behaviour will only occur in the saturated region. We
also note from Section 2.1 that the system will remain
saturated if the mentor population is decreasing (so
that x is always greater than ry). Therefore for a sys-
tem to exit saturation and reach steady state in the un-
saturated region, we require ˙y > 0. From inspection
of Eqn. (2), this occurs when br > c, or r > 0.25 in
the benchmark scenario.
Further analysis of the various solutions for the
benchmark scenario are completed in the subsequent
sections. In Section 3.1, system solutions that reach
the target populations are investigated (when r >
0.25). In Section 3.2, system solutions which do not
reach the target populations are investigated (when
r < 0.25). In Section 3.3, generalizations are made
of the system behaviour as r is varied.
3.1 System Solutions Which Reach the
Target Populations
An arbitrary value of r = 1/3 is chosen in Fig. 1
to showcase the relevant system dynamics, in which
there must be at least three times more mentors than
mentees to prevent the system from becoming satu-
rated. The solution trajectory and velocity vectors are
plotted, as well as the initial and target populations. A
dashed yellow line is added to visualize the saturation
limit, which is the ratio of mentees to mentors when
the system crosses into saturation. For reference, the
unsaturated region is present to the left of the line,
and the saturated region is present to the right. There
are two asymptotes in the unsaturated regime, a verti-
cal and diagonal asymptote, which are represented as
dashed-pink lines. From the plot, the solution begins
at the initial populations in the unsaturated region,
crosses into the saturated region, then curls, back into
the unsaturated region where it reaches steady state at
the target populations. The mentee population over-
shoots its target population, with its largest popula-
tion size occurring at the inflection point in the sat-
urated region. The system also exits the saturated
region below the diagonal asymptote in the unsatu-
rated region; with the mentor population approaching
its target population from below and does not contain
an overshoot.
As r is increased, the saturation limit line becomes
shallower, and the system spends less time in the satu-
rated region. Solutions of the benchmark scenario for
Investigation of Workforce Dynamical Behaviour from a Phase Plane Perspective
37
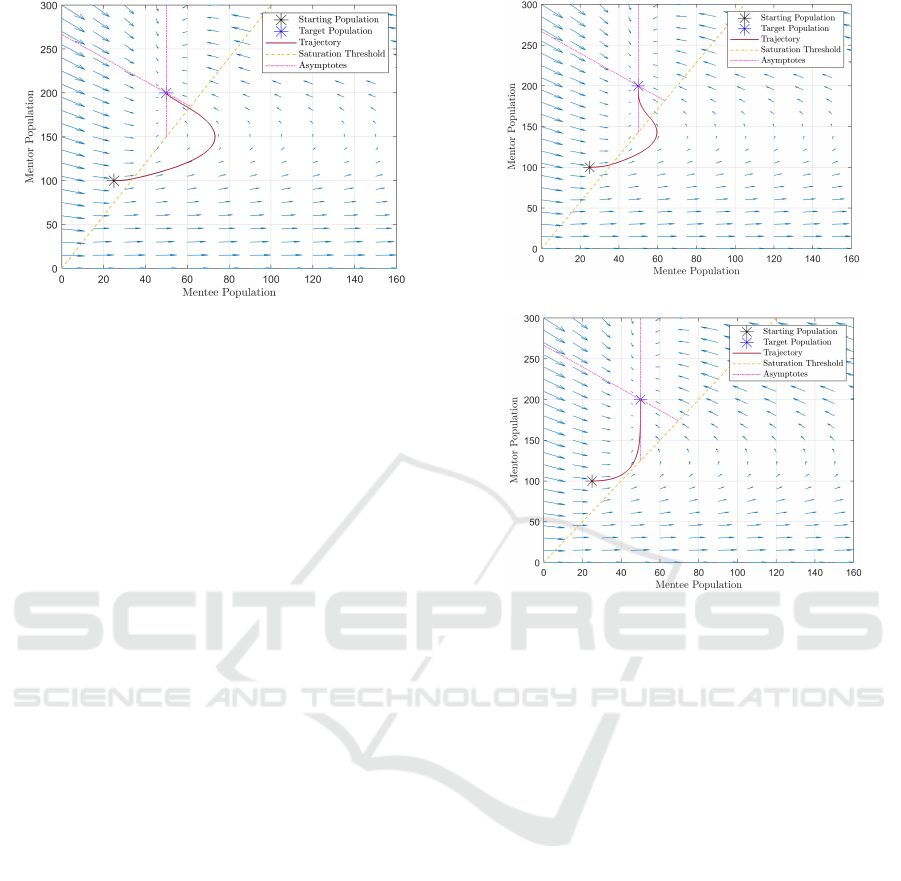
Figure 1: Phase plane of the benchmark scenario, with the
saturation limit (r) set to 1/3.
increased r values are shown in Fig. 2. In Fig. 2a, r is
set to 0.35, and in Fig. 2b, r is set to 0.4. Both solu-
tions reach the steady state at the target populations.
In Fig. 2a, the system has less of a mentee overshoot
than the plot of r = 1/3 shown in Fig. 1, with the
inflection point located at a smaller mentee popula-
tion. In Fig. 2b, we see that the saturation limit is high
enough that the system never becomes saturated. The
solution does not contain an inflection point as the
system is always unsaturated, with the largest mentee
and mentor populations located at their target popula-
tions. In addition, since the system remains in the un-
saturated region, the system no longer depends on the
value of the saturation limit, so the solution remains
unchanged if this value is further increased.
As r is decreased, the system spends more time in
the saturated region. Solutions of the benchmark sce-
nario for decreased saturation limit values is shown in
Fig. 3. In Fig. 3a, r is set to 0.3, and in Fig. 3b, r
is set to 0.28. As r is decreased, the inflection point
in the saturated region occurs at a larger mentee pop-
ulation, as both the mentor and mentee populations
experience greater overshoots from their target popu-
lations. In addition, the system takes longer to reach
steady state as more time is spent in the saturated re-
gion.
3.2 System Solutions Which Do not
Reach the Target Populations
Fig. 4 shows solutions for the benchmark scenario in
which the system does not reach the target popula-
tions. In Fig. 4a, r is set to 0.25, and in Fig. 4b, r is
set to 0.2. In Fig. 4a, the value of r is set such that
the upgrade rate is equal to the attrition rate (br = c).
As a result, the mentor population remains unchanged
from its starting value while the mentee population
increases to infinity. In Fig. 4b, the value of r is set
(a) r = 0.35.
(b) r = 0.4.
Figure 2: Phase plane of the benchmark scenario, with the
saturation limit (r) set to 0.35 (top) and 0.4 (bottom).
such that the upgrade rate is less than the attrition rate
(br < c), in which the mentor population decreases to
zero while the mentee population increases to infin-
ity. The target populations are also located in the sat-
urated region, so the system will never reach steady
state at the target populations regardless of the initial
populations.
3.3 Possible Behaviour for the System
From the phase plots in Section 3.1 and Section 3.2,
we can split up the possible behaviour into three sec-
tions depending on value of the saturation limit:
• When r ≤ c/b (r ≤ 0.25 for the benchmark sce-
nario), the system remains in the saturated region
and never reaches a steady state.
• When r is very high, the system reaches steady state
at the target populations but always remains in the
unsaturated regime.
• There exists a middle range of r values in which the
system reaches the steady state at the target popu-
lations, but crosses into the saturated region for a
period of time. This range is defined on the low
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
38
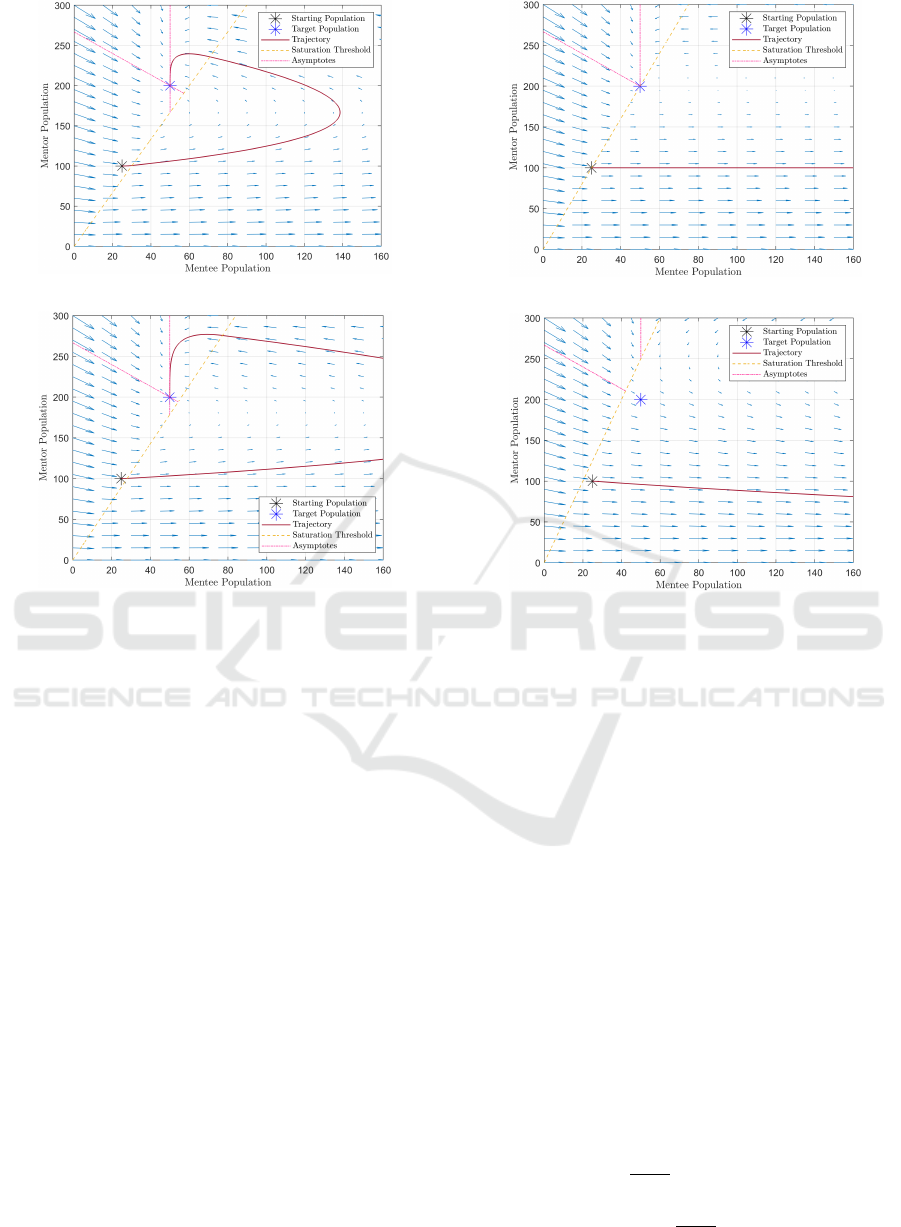
(a) r = 0.3.
(b) r = 0.28.
Figure 3: Phase plane of benchmark scenario, with the sat-
uration limit (r) set to 0.3 (top) and 0.28 (bottom).
end by r > c/b (r > 0.25 for the benchmark sce-
nario), and on the high end by solving the unsatu-
rated region equations for the r value with the solu-
tion with one intersection point with the saturation
limit. For the benchmark scenario, this was found
to occur when r ≈ 0.3837, as the time in satura-
tion was zero. Above this r value, the system never
crosses into the saturated region.
We are most interested in the region of r values which
reach the steady state by crossing into the saturated re-
gion (0.25 < r < 0.3837 for the benchmark scenario),
as these solutions are dependent on more than one
system of equations. The subsequent analysis con-
tained in this paper will largely focus on this range of
r values.
4 ANALYTICAL SOLUTIONS
FOR AN ARBITRARY SYSTEM
From the plots of the benchmark scenario in Sec-
tion 3, several important observations were made: 1.)
The unsaturated region contains two asymptotes and
one steady state value, 2.) The saturated region has no
(a) r = 0.25.
(b) r = 0.2.
Figure 4: Phase plane of the benchmark scenario, with the
saturation limit (r) set to 0.25 (top) and 0.2 (bottom).
steady state value, and 3.) There was a range of r val-
ues in which the system reaches the target populations
by crossing into the saturated region. In this case, the
largest mentee population would occur at the system’s
inflection point in the saturated region. In this section
the individual regions are further investigated by solv-
ing their respective equations for an arbitrary system.
Section 4.1 and Section 4.2 provide an analysis of the
unsaturated and saturated regimes respectively.
4.1 Unsaturated Region
In the unsaturated region we have the following sys-
tem of equations:
˙x = a −bx, and (4)
˙y = bx −cy (5)
This region’s solution is shown in Eqn. (6) and
Eqn. (7).
x(t) = x
f
+ (x
0
− x
f
)e
−bt
(6)
y(t) = y
f
+
b
c − b
(x
0
− x
f
)e
−bt
+
y
0
−
b
c − b
(x
0
− y
f
)
e
−ct
(7)
Investigation of Workforce Dynamical Behaviour from a Phase Plane Perspective
39
The mentee (x) and mentor (y) populations decay to
the target populations of x
f
(a/b) and y
f
(a/c) respec-
tively as time increases, which are the target popula-
tions when the system reaches the steady state. The
system approaches the target populations regardless
of the initial population values (x
0
and y
0
).
To determine the asymptotes in the region, we can
find the angle of the system around the target popula-
tion point in the phase plane, shown in Eqn. (8).
tan[θ(t)] =
y(t) − y
f
x(t) − x
f
=
b
c − b
+
y
0
−
b
c−b
(x
0
− y
f
)
(x
0
− x
f
)
e
(b−c)t
(8)
The asymptotes can be found by determining the
initial population values which result in a constant an-
gle (θ) for all time. From Eqn. (8), we see this is the
case when either the denominator is zero, or the time-
dependent exponential term is eliminated. Therefore,
we can find the two asymptotes in the phase plane:
• A vertical asymptote when the initial and final
mentee populations are the same (x = x
f
).
• A diagonal asymptote with the following equation:
y = y
f
+
b
c − b
(x − x
f
) (9)
The asymptote is at an angle centred around the tar-
get population point of θ = arctan(b/(c −b)).
From Eqn. (8), the angle of approach to the target
population point is ±π/2 as time increases to infinity
since b > c. The only exception to this is if the tra-
jectory is located on the diagonal asymptote. Further-
more, a solution starting above the diagonal asymp-
tote will approach the target population point from
above at an angle of π/2, containing a mentor over-
shoot, while a solution starting below the diagonal
asymptote will approach the target population point
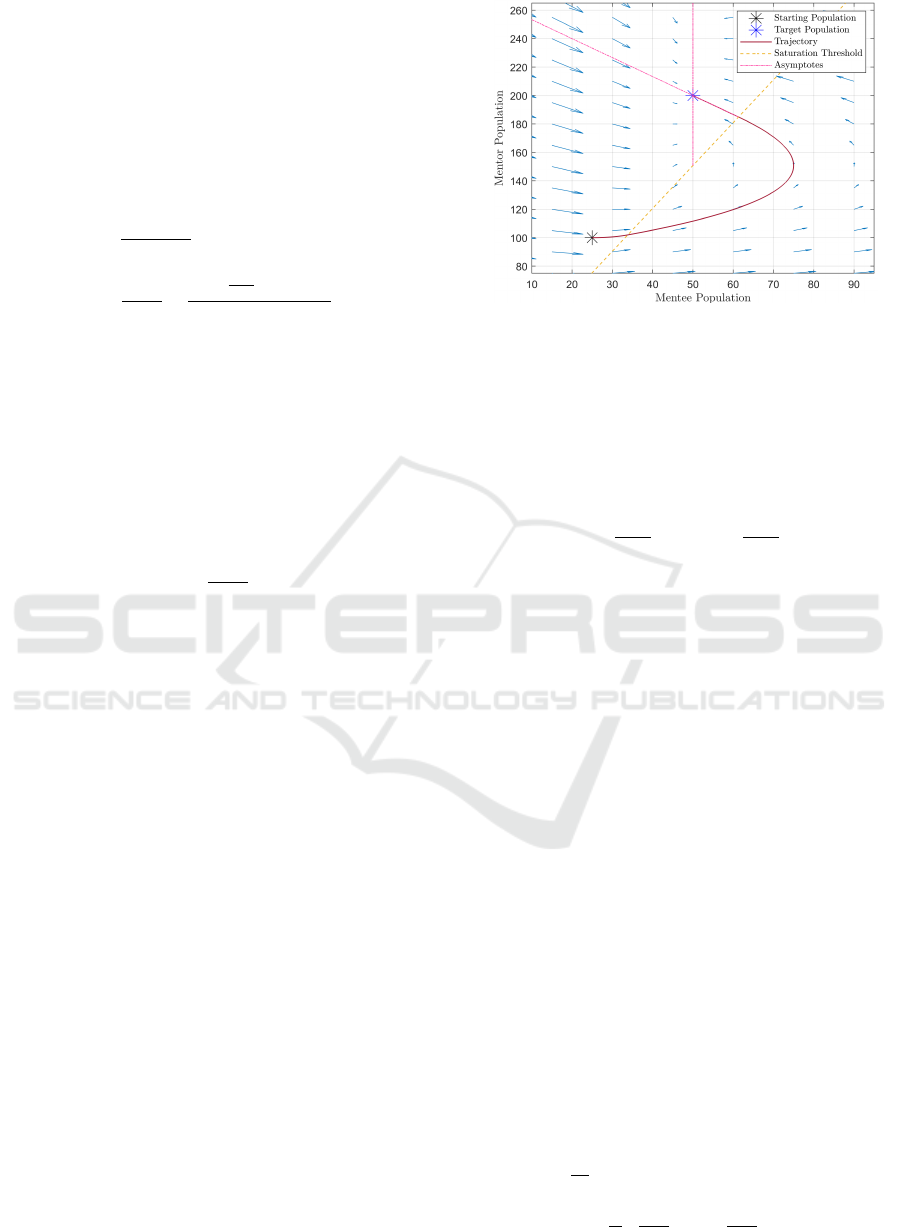
from below at an angle of −π/2. Using these asymp-
totes, we can find the r value for the full solution
which exits the saturated region along the diagonal
asymptote. This value was numerically determined
using a bisection search and finding the system with
an angle of approach to the target populations which
is not ±π/2. For the benchmark scenario, this value
was found to be r ≈ 0.3317. This is analogous to a
critically-damped system, as this is the smallest possi-
ble saturation limit for the benchmark scenario which
prevents a mentor overshoot. The phase plane solu-
tion for this r value is shown in Fig. 5.
4.2 Saturated Region
In the saturated region we have the following system
of equations:
Figure 5: Phase plane of the benchmark scenario, with the
saturation limit (r) set to ≈ 0.3317.
˙x = a − bry, and (10)
˙y = −αy, (11)
where α ≡ c − br, the difference between the attri-
tion and upgrade rates in the saturated region. This
region’s solution is shown in Eqn. (12) and Eqn. (13).
x(t) =
x
0
−
bry
0
α
+ at +
bry
0
α
e
−αt
(12)
y(t) = y
0
e
−αt
(13)
The mentee equation contains a ramp term, so the
system does not have a steady state value. The be-
haviour of the saturated region is dependent on the
value of the saturation limit, the one independent vari-
able. If the attrition rate is greater than the upgrade
rate (c > br), then as time increases, the mentee pop-
ulation approaches infinity and the mentor population
decays to zero. Likewise, if the upgrade rate is greater
than the attrition rate (c < br), then as time increases,
the mentee population approaches negative infinity
while the mentor population approaches infinity. Fi-
nally, if the two rates are the same (br = c), Eqn. (12)
and Eqn. (13) simplify to Eqn. (14) and Eqn. (15). As
time increases, the mentor population does not change
and the mentee population goes to either positive or
negative infinity at a constant rate of a − bry
0
.
x(t) = x
0
+ (a − bry
0
)t (14)
y(t) = y
0
(15)
From Eqn. (12) and Eqn. (13), the inflection point of
a system in the saturated region can be calculated by
solving for when the derivative of the Eqn. (12) with
respect to x is zero, given in Eqn. (16) and Eqn. (17).
y
in f
=
a
br
, (16)
x
in f
= x
0
−
a
α
y
0
y
in f
+ ln
y
in f
y
0
− 1
, (17)
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
40
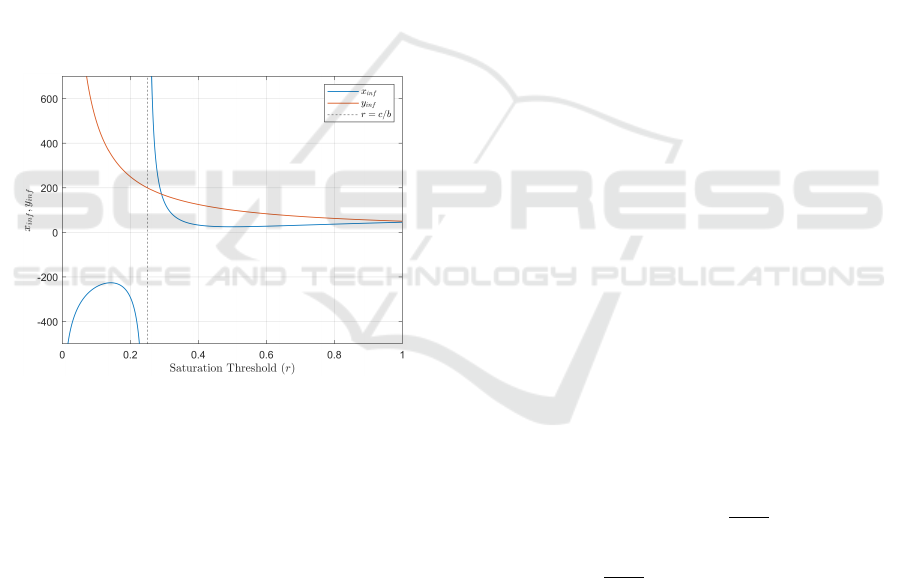
where x
in f
and y
in f
denote the mentee and mentor
populations respectively at the inflection point. The
inflection points for the benchmark scenario are plot-
ted in Fig. 6 for saturation limits between zero and
one. The mentee population at the inflection point
(x
in f
) is shown in blue, and the mentor population at
the inflection point (y
in f
) is shown in orange. The
mentor population approaches infinity at r = 0, and
decreases to zero as r is increased. The mentee pop-
ulation contains two asymptotes at r = 0 and r = c/b
(r = 0.25 for the benchmark scenario). For low val-
ues of r, the system has an inflection point at a mentee
population below zero and approaching negative in-
finity at the two asymptotes. For high values of r, the
mentee population approaches infinity from the right
at r = c/b, then generally decreases as r is increased.
We can observe that the mentee and mentor popula-
tions at the inflection point increase as r is lowered to
r = c/b. This will put the system deeper into satu-
ration, putting additional stress on the mentors in the
system.
Figure 6: Mentee and mentor populations at the inflection
point for the benchmark scenario as r is varied.
5 TIME TO SETTLE AT A
THRESHOLD
As noted in Section 3.3, the system reaches the steady
state at the target populations in the unsaturated re-
gion. In this region, the mentee and mentor popula-
tions experience an exponential decay to their steady
state values, as noted in their respective equations,
Eqn. (6) and Eqn. (7) shown in Section 4.1. As a
result, the system approaches the target populations
asymptotically, with both populations requiring a time
of infinity to reach their final values. Therefore, to in-
vestigate the settling time of the system as the satura-
tion limit (r) is varied, a settling threshold is used as
a surrogate. In Section 5.1, a formal definition for the
settling threshold is given. In Section 5.2, the time
for the system to settle at a threshold is calculated.
Finally in Section 5.3, the time to settle at a given
threshold is analysed as the r is varied for the bench-
mark scenario.
5.1 Settling Threshold Definition
The settling threshold σ is defined radially around
the target population point in the phase plane, with
the value of σ defining the threshold radius. The
threshold equations in the phase plane are defined
by Eqn. (18) and Eqn. (19), forming a circle centred
around the target population values.
x(σ) = σcos(θ) + x
f
, and (18)
y(σ) = σsin(θ) + y
f
, (19)
where θ ∈ [0,2π].
5.2 Time Components of a Solution
As noted in Section 3.3, there are three possible be-
haviours the system could follow: (1) If r is too
low, the system remains saturated and never reaches a
steady state. (2) If r is very high, the system reaches
steady state at the target populations, but remains un-
saturated for all time. (3) For an intermediate range of
r values, the system crosses into the saturated region
but still reaches steady state at the target populations.
For the second case, the settling time can be deter-
mined by solving the unsaturated equations given in
Section 4.1 for the time to reach the radial threshold
σ. This is completed in Eqn. (20) by finding the ra-
dius of the system around the target population point.
As the system is not dependent on r, Eqn. (20) can
be numerically solved for the time to reach a given
threshold value σ.
σ(t)
2
= [x(t) − x
f
]
2
+ [y(t) − y
f
]
2
=
h
(x
0
− x
f
)e
−bt
i
2
+
b
c − b
(x
0
− x
f
)e
−bt
+
y
0
−
b
c − b
(x
0
− y
f
)
e
−ct
2
, (20)
where x
0
and y
0
are the starting populations. For the
third case, the process of finding the settling time is
stitched from three components:
• The time in the unsaturated region from the initial
population to the saturation limit. This can be deter-
mined by solving for the first intersection point of
the unsaturated equations, Eqn. (6) and Eqn. (7) in
Section 4.1 with the saturation limit, x = ry. Com-
bining these three equations yields Eqn. (21). This
Investigation of Workforce Dynamical Behaviour from a Phase Plane Perspective
41

equation can be numerically solved for the time to
the saturation entry point.
0 = (ry
f
− x
f
) + (x
0
− x
f
)
rb
c − b
− 1
e
−bt
+ r
y
0
−
b
c − b
(x
0
− y
f
)
e
−ct
,
(21)
• The time in the saturated region between its two in-
tersection points with the saturation limit. This can
be determined similarly by utilizing the saturated
equations, Eqn. (12) and Eqn. (13) in Section 4.2,
for the system which starts at the saturation entry
point, solving for the second intersection point with
the saturation limit. The time in saturation is given
by Eqn. (22).
t =
x
s
a
b
α
− 1
+
1
α
W
−1
h
x
s
a
(α − b)e
x
s
a
(α−b)
i
,
(22)
where W
k
is the Lambert W Function, looking at its
k = −1 branch, α ≡ c − br, t is the time to the satu-
ration exit point, and x
s
is the mentee population at
the saturation entry point.
• The time in the unsaturated regime from the satu-
ration exit point at the saturation limit, to the given
threshold σ. This can be determined by inverting
Eqn. (20) for the time to reach σ, with x
0
and y
0
replaced as the saturation exit point coordinates.
5.3 Time to Settling Threshold for the
Benchmark Scenario
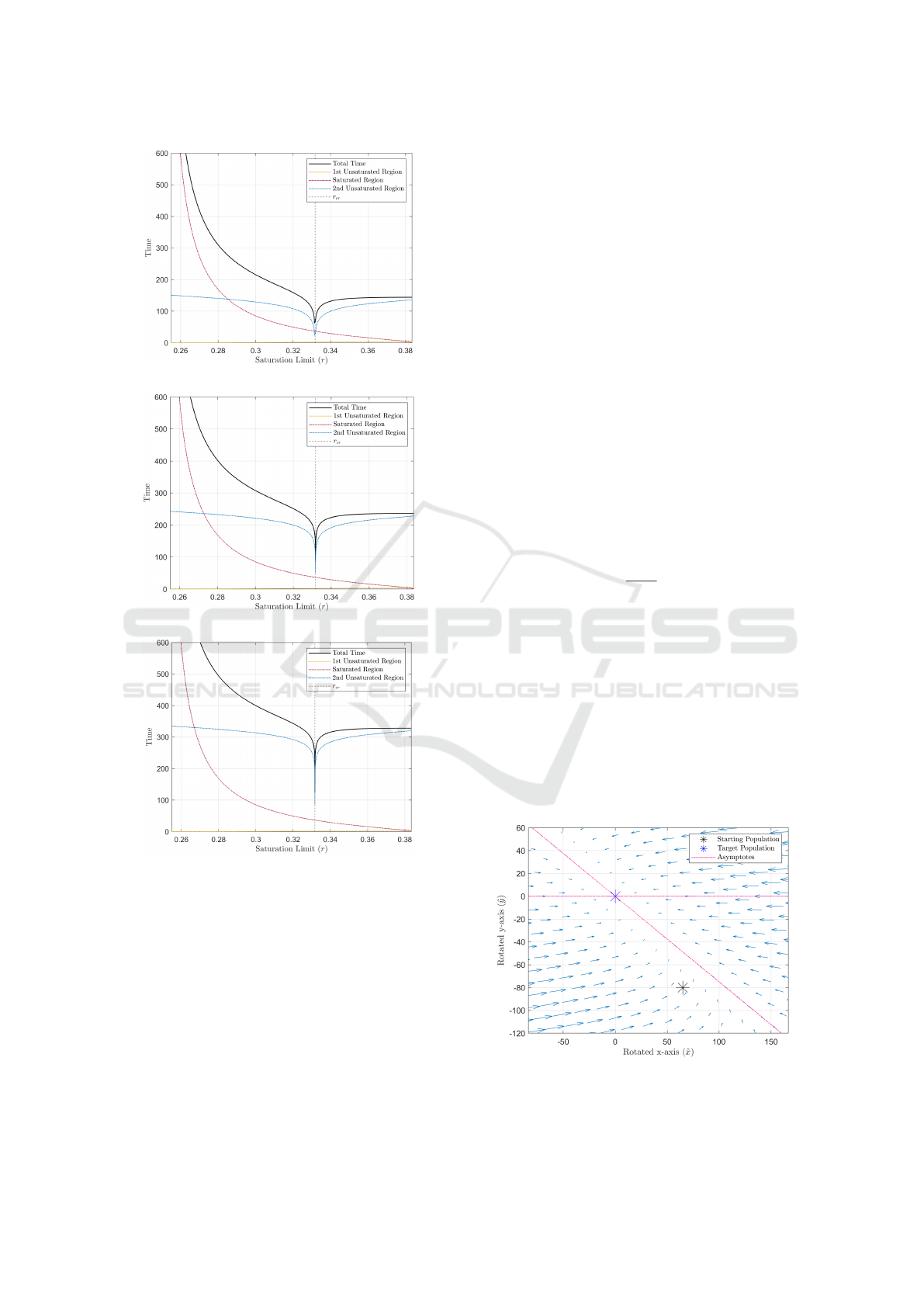
Using the process defined in Section 5.2, the settling
time was tabulated as r was varied for systems which
cross into saturation (0.25 < r < 0.3837 for the bench-
mark scenario). This is shown in Fig. 7 for an arbi-
trary threshold of σ = 1. The individual times the sys-
tem spends in each region are included, with the time
from the initial populations to saturation shown in yel-
low, the time spent in saturation shown in red, and the
time spent from saturation to the threshold σ shown
in blue. Finally, the r value for the system which exits
the saturated region along the diagonal asymptote in
the unsaturated region is shown as a dashed vertical
line labelled as r
cr
, equal to r
cr
≈ 0.3317 as noted in
Section 4.1. From the plot, it is observed that solu-
tions with low values of r take much longer to settle,
as more time is spent in saturation. As r increases,
the settling time approaches a specific value, which
is the time for the system if it were always unsatu-
rated. Finally, there exists a well which occurs solely
in the unsaturated region as the system approaches the
settling threshold. From the total settling time, the r
value for the minimum settling time is less than r
cr
.
Therefore this solution overshoots the target mentor
population before decaying to the steady state.
Figure 7: Total settling time to threshold and breakdown of
time spent in each region for the benchmark scenario and
range of interested saturation limits. The settling threshold
is set to σ = 1.
The settling times for various saturation limits
were analysed as the threshold σ decreased to zero.
Shown in Fig. 8 are plots of the settling time for
decreased threshold values of σ = 10
−1
in Fig. 8a,
σ = 10
−3
in Fig. 8b, and σ = 10
−5
in Fig. 8c. From
the plots, the time to the saturation entry point and
in the saturated region remain unchanged, as they are
independent of the chosen threshold. In addition, the
total time to reach decreasing settling thresholds in-
creases for all values of r, given the exponential de-
cay to the target populations. However, the full width
at half maximum (FWHM) of the well decreases in
width, and the well increases in depth as the thresh-
old goes to zero. The r value for the minimum set-
tling time also drifts closer to r
cr
as the threshold de-
creases. Therefore, the overshoot of the system with
the minimum settling time decreases as the threshold
goes to zero, approaching the system which exits the
saturated system along the diagonal asymptote in the
unsaturated region.
6 ANALYSIS OF AN ARBITRARY
SYSTEM NEAR STEADY STATE
To understand the behaviour observed in Section 5.3,
the interaction of the unsaturated region with the ra-
dial settling threshold is investigated by explaining
two mathematical proofs. In Section 6.1, the equa-
tions for the unsaturated regime are rotated to sim-
plify their form. Section 6.2 shows why the solution
with the minimum settling time at a non-zero thresh-
old is associated with a system overshooting the target
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
42
(a) σ = 10
−1
.
(b) σ = 10
−3
.
(c) σ = 10
−5
.
Figure 8: Total settling time and breakdown of time spent in
each region for the benchmark scenario and range of inter-
ested saturation limits. The settling threshold is decreased
to σ = 10
−1
, 10
−3
, and 10
−5
.
mentor population. Section 6.3 demonstrates that as
the threshold is taken to zero, the solution along the
diagonal asymptote will eventually precede all other
non-diagonal solutions.
6.1 Simplification of the Unsaturated
Region
To simplify the equations for the unsaturated region,
the system was re-centred around the target popula-
tion point and rotated such that the diagonal asymp-
tote is present along the new x-axis. The transformed
system is dubbed the ˜x(t) and ˜y(t) basis, with the ˜y(t)
basis vector perpendicular to the ˜x(t)-axis, the diago-
nal asymptote. This transformation is completed us-
ing a rotation matrix, with the angle of rotation (θ)
corresponding to the angle of the diagonal asymp-
tote in the unsaturated regime. The transformation
from the x(t) and y(t) basis to the ˜x(t) and ˜y(t) basis
is shown in Eqn. (23).
˜x(t)
˜y(t)
=
cos(θ) −sin(θ)
sin(θ) cos(θ)
x(t) − x
f
y(t) − y
f
, (23)
where θ = arctan [b/(b − c)], noted in Section 4.1.
The equations for the unsaturated regime in the
˜x(t) and ˜y(t) basis are given in Eqn. (24) and
Eqn. (25).
˜x(t) = ˜x
0
e
−bt
+ ˜y
0
b
b − c
e
−bt
− e
−ct
, (24)
˜y(t) = ˜y
0
e
−ct
, (25)
where ˜x
0
and ˜y
0
denote the starting coordinates in the
new basis, ˜x(0) and ˜y(0) respectively. A plot of the
phase plane in the new rotated basis for the bench-
mark scenario is shown in Fig. 9. Note that the diag-
onal asymptote in the original system now becomes
horizontal in the rotated system. In what follows,
the “diagonal asymptote” will refer to this horizon-
tal asymptote in the new rotated reference frame. In
addition, the “vertical asymptote” will refer to the di-
agonal asymptote which is present.
Figure 9: Phase plane of the unsaturated regime in the ro-
tated reference frame.
Investigation of Workforce Dynamical Behaviour from a Phase Plane Perspective
43
6.2 Settling Time at a Non-Zero
Threshold
We wish to understand why it was observed in Sec-
tion 5.3 that the solution with the minimum settling
time to a non-zero threshold corresponded to a sys-
tem with a mentor overshoot. As noted in Section 4.1,
these solutions are located above the diagonal asymp-
tote, or ˜y(t) > 0. In order for these solutions to reach
a threshold quicker, they must travel in the phase
plane at an increased velocity (i.e mentees are trained
faster). From Eqn. (25), the ˜y(t) component of a so-
lution is symmetrical across the diagonal asymptote
( ˜y = 0). Therefore, the difference in velocity must oc-
cur as a result of the movement in the ˜x direction. The
velocity of solutions in the ˜x direction can be calcu-
lated by taking the derivative of Eqn. (24) with respect
to time (t):
d ˜x(t)
dt
= −b ˜x
0
e
−bt
+ ˜y
0
b
b − c
ce
−ct
− be
−bt
(26)
The second term in Eqn. (22) has a component de-
pendent on its distance from the diagonal asymptote
( ˜y), which is not symmetric across the asymptote. We
can examine the time-dependent portion of this term,
labelled as function f :
f (t) = ce
−ct
− be
−bt
(27)
At a time of zero, the function is negative since c < b,
while it becomes positive over time since the first term
decays at a slower rate than the second term. There-
fore, for positive ˜y
0
values, the velocity at small times
in the ˜x direction is negative but has a larger magni-
tude than the solutions below the diagonal asymptote.
This occurs since there are more mentors present at
larger ˜y
0
values, so mentees are trained at a quicker
rate. At large times, these overshooting solutions will
then slow down approaching the vertical asymptote as
the velocity magnitude is now smaller.
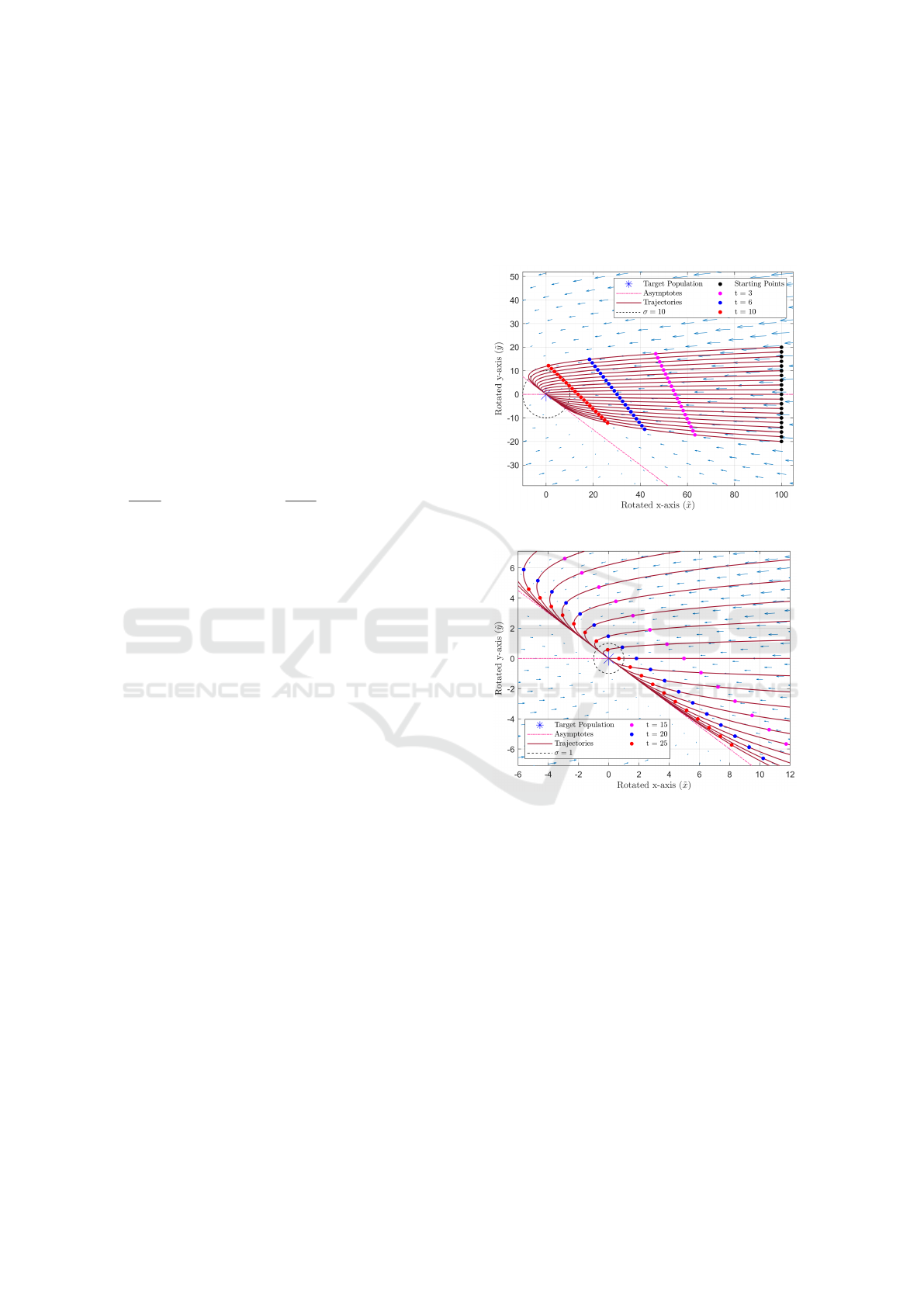
This behaviour can be observed in Fig. 10, in
which several solutions starting an arbitrary distance
of ˜x
0
= 100 away are plotted and sampled at various
times in Fig. 10a and Fig. 10b. At small times in
Fig. 10a, the solutions above the diagonal asymptote
are closer to the target population point, travelling at
an increased velocity relative to solutions below the
asymptote. As a result, several streamlines above the
diagonal asymptote reach the plotted settling thresh-
old of σ = 10. At large times in Fig. 10b, while all
solutions decay in velocity as they approach the tar-
get population point, the solutions above the diagonal
asymptote slow down and reverse direction. Only the
first streamline above the diagonal reaches the smaller
settling threshold of σ = 1 in around 20 time units.
All other solutions have a mentor population which is
too high or low to reach the threshold. By extension,
as the settling threshold becomes smaller, the solu-
tion with the fastest time to the threshold must have
a smaller mentor overshoot, approaching the solution
along the diagonal asymptote.
(a) Sampled at time units of 3, 6, and 10. σ = 10.
(b) Sampled at time units of 15, 20, and 25. σ = 1.
Figure 10: Plot of several solutions starting x
′
0
= 100 away
from the target population point, sampled at various times.
An arbitrary settling threshold is also plotted.
6.3 Settling Time at a Threshold near
Zero
We wish to understand why it was observed in Sec-
tion 5.3 that the solution with the minimum settling
time to a threshold approached the solution along the
diagonal asymptote as the threshold was decreased to
zero. While this is a logical extension to the discus-
sion in Section 6.2, a mathematical proof for gener-
alized input parameters is given below. In the origi-
nal system, since the input parameters (a,b, c, r,x
0
,y
0
)
can vary, a solution can approach the target popula-
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
44

tion point from anywhere in the phase plane. There-
fore, we need to show that given two systems in the
unsaturated regime: The first starting along the diago-
nal asymptote an arbitrary distance away from the tar-
get population point, and the second which can start
anywhere else in the phase plane, the solution with
the minimum time to reach a threshold is the solution
along the asymptote, as the threshold nears zero. We
will define the system along the asymptote as System
1, and the system starting anywhere else in the phase
plane as System 2.
We note that if a system has the fastest time to
reach a threshold, then the all other systems are fur-
ther away from the target population at this time.
Therefore, we can show that the radius centred around
the target population from the first system is always
less than the radius from the second system as time
approaches infinity. The radii of the two systems rel-
ative to the target population can be calculated from
Eqn. (24) and Eqn. (25), shown in Eqn. (28) and
Eqn. (29). To simplify the equations, the substitu-
tions: τ ≡ e
−bt
, and φ ≡
b
b−c
are made. Eqn. (24)
and Eqn. (25) were used to find the radii of the two
systems, shown in Eqn. (28) and Eqn. (29).
σ
1
(τ)
2
= ( ˜x
c
τ)
2
, (28)
σ
2
(τ)
2
= [ ˜x(τ)]
2
+ [ ˜y(τ)]
2
= ˜x
2
0
τ
2
+ ˜y
0
2 ˜x
0
φτ
2
− 2 ˜x
0
φτ
1+
c
b
+ ˜y
2
0
h
φ
2
τ
2
− 2φ
2
τ
1+
c
b
+
φ
2
+ 1
τ
2c
b
i
,
(29)
where the starting distance from the target population
along the diagonal asymptote for System 1 is labelled
as ˜x
c
, and the starting coordinates for System 2 are la-
belled as ˜x
0
and ˜y
0
. Each of the starting coordinates
may be any real number other than zero, such that:
(1) The two systems are not separated by an infinite
distance, (2) System 1 is not at the target population
point, and (3) Both two systems are not on the asymp-
tote. The difference in radii can found by subtracting
Eqn. (28) from Eqn. (29), shown in Eqn. (30).
σ
2
(τ)
2
− σ
1
(τ)
2
= τ
2
˜x
0
2
− x
′2
c
+ ˜y
0
2 ˜x
0
φτ
2
− 2 ˜x
0
φτ
1+
c
b
+ ˜y
0
2
h
φ
2
τ
2
− 2φ
2
τ
1+
c
b
+
φ
2
+ 1
τ
2c
b
i
,
(30)
Since all systems reach the steady state at a time of
infinity (τ = 0), taking the limit of Eqn. (30) as τ goes
to zero will yield a difference of zero. Therefore, it
must be shown that the difference in radii is positive
for small finite valuers of τ = ε, where ε is very close
to zero. From Eqn. (30), replacing τ with ε and writ-
ing out our required equality yields Eqn. (31).
ε
2
˜x
0
2
− x
′2
c
+ ˜y
0
2 ˜x
0
φε
2
− 2 ˜x
0
φε
1+
c
b
+ ˜y
0
2
h
φ
2
ε
2
− 2φ
2
ε
1+
c
b
+
φ
2
+ 1
ε
2c
b
i
> 0
(31)
Eqn. (31) can be rearranged and divided through by
ε
2
to yield Eqn. (32).
∴
˜x
0
2
− x
′2
c
+ 2 ˜x
0
˜y
0
φ + ˜y
0
2
φ
2
>
ε
c
b
−1
h
2 ˜x
0
˜y
0
φ + 2 ˜y
0
2
φ
2
− ε
c
b
−1
φ
2
+ 1
i
(32)
From Eqn. (32), the left-side can be any real, finite
value. For the right-side, ε
c
b
−1
is a negative exponen-
tial function and approaches infinity as ε goes to zero.
Looking at the square-bracketed term, for a small but
finite value of ε, the second term will overpower the
first term. Therefore, the right-side of the equation
will decrease exponentially to negative infinity. As
a result, depending on the input starting coordinates,
two cases exist: (1) The right-side of the equation will
always be smaller than the left-side as ε is decreased,
or (2) The equation may not hold for larger values of
ε, but there is a value of ε in which the right-side will
decrease and be less than the left-side for all smaller,
but finite values of ε. In the first case, System 1 will
always be ahead of System 2 for all times, while in
the second case, System 1 begins behind System 2
but overtakes it at a finite value of time. In either case,
System 1 will always end up closer to the target pop-
ulation point than System 2 as time increases, thereby
satisfying the equality.
Since the equality is satisfied, a system approach-
ing the steady state along the diagonal asymptote will
be the closest system to the target population for large
values of time, regardless of the starting coordinates
of any other arbitrary system. Therefore, a system
along the diagonal asymptote has the quickest time to
a threshold which is approaching zero.
7 CONCLUSION
In this paper, a continuous model was used to inves-
tigate the workforce population dynamics of on-the-
job training. Included in the model are the effects of
a high mentee to mentor ratio, when the mentors can
no longer train all the mentees present in the system.
When this occurs, the system is described by a sep-
arate, unhealthy regime. A key parameter of interest
was the saturation limit (r): the ratio of mentees to
mentors above which the system becomes unhealthy
(saturated). It was noted that to decrease the time for
the system to reach the target populations, r must be
set so that the system becomes saturated. This is to
orient the system to take advantage of the increased
Investigation of Workforce Dynamical Behaviour from a Phase Plane Perspective
45

velocity near the diagonal asymptote. It was proven
that the system with the minimum settling time at a
non-zero threshold contains a mentor overshoot and
will enter the saturated region; and as the threshold
is decreased to zero, the system with the minimum
settling time will approach the system which exits the
saturated region along the diagonal asymptote. This is
analogous to a critically damped system for the men-
tor population, in which the time to settle is optimally
reduced while having no overshoot of mentors.
In a realistic training scenario for aircraft techni-
cians, the time to train a required quota of new tech-
nicians can be reduced by allowing the system to be-
come saturated since this maximizes the total num-
ber of mentees trained at once. However, this will
require the system to become saturated and the pop-
ulations to overshoot. While overshooting the target
populations increases the time to a steady state, this
orients the populations to take advantage of the in-
creased training rate once the system exits saturation.
If there is a personnel cap which is imposed to prevent
a population overshoot, particularly for fully-trained
technicians (mentors), there are fewer technicians to
train the mentees and the system will take longer to
reach steady state. The diagonal asymptote represents
an equilibrium between maximizing the training rate
and keeping the populations close to their target val-
ues. While the training rate can be increased by hav-
ing more technicians, the drawback is that the num-
ber of technicians is further from the target value and
the total time is increased. Finally, the scenario cho-
sen corresponds to a growth phase where the popula-
tions are doubled. In a downsizing phase (e.g: pop-
ulations are halved), the system may never enter sat-
uration (depending on the initial ratio of mentees to
mentors) since there are fewer mentees to train. In
this case the system is more dependent on the attrition
rate, since the target values are reached once enough
mentors leave.
Moving forward with this model, time-dependent
input parameters can be investigated. The constant
values used for the parameters greatly restricted the
system dynamics. In a realistic model these param-
eters could vary as the system evolves to optimally
reduce the transient time and population overshoot,
while still reaching the target populations at their in-
tended values. For example, a solution with an op-
timally reduced time may hypothetically involve ad-
justing the input parameters over time to maximize
the training rate while orienting the trajectory to reach
the diagonal asymptote without becoming saturated.
REFERENCES
Bastian, N. D. and Hall, A. O. (2020). Military workforce
planning and manpower modeling. In Scala, N. M.
and Howard, J. P., editors, Handbook of Military and
Defense Operations Research. CRC Press, 1st edition.
Boileau, M. L. A. (2012). Workforce modelling tools used
by the canadian forces. pages 18–23.
Bourque, F.-A. (2019). Aircraft technician occupations:
A policy review. Reference Document DRDC-
RDDC-2019-D062, Defence Research and Develop-
ment Canada.
Bryce, R. and Henderson, J. (2020). Workforce popula-
tions: Empirical versus markovian dynamics. In 2020
Winter Simulation Conference (WSC), pages 1983–
1993.
Diener, R. (2018). A solvable model of hierarchical work-
forces employed by the canadian armed forces. Mili-
tary Operations Research, 23:47–57.
Forrester, J. (1965). Industrial Dynamics. System dynamics
series. Pegasus Communications.
Henderson, J. and Bryce, R. (2019). Verification methodol-
ogy for discrete event simulation models of personnel
in the canadian armed forces. In 2019 Winter Simula-
tion Conference (WSC), pages 2479–2490.
Novak, A., Tracey, L., Nguyen, V., Johnstone, M., Le, V.,
and Creighton, D. (2015). Evaluation of tender solu-
tions for aviation training using discrete event simu-
lation and best performance criteria. In 2015 Winter
Simulation Conference (WSC), pages 2680–2691.
Okazawa, S. (2020). Methods for estimating incidence rates
and predicting incident numbers in military popula-
tions. In 2020 Winter Simulation Conference (WSC),
pages 1994–2005.
Schaffel, S., Bourque, F.-A., and Wesolkowski, S. (2021).
Modelling the mentee-mentor population dynamics:
Continuous and discrete approaches. In 2021 Winter
Simulation Conference (WSC), pages 1–10.
S
´
eguin, R. (2015). Parsim, a simulation model of the royal
canadian air force (rcaf) pilot occupation - an assess-
ment of the pilot occupation sustainability under high
student production and reduced flying rates. In Pro-
ceedings of the 4th International Conference on Op-
eratinal Reserach and Enterprise Systems (ICORES).
Swift, R. J. (2002). A stochastic predator-prey model. In
Bulletin of the Irish Mathematical Society, number 48.
Irish Mathematical Society.
Vincent, E. and Okazawa, S. (2019). Determining equilib-
rium staffing flows in the canadian department of na-
tional defence public servant workforce. In 2019 In-
ternational Conference on Operations Research and
Enterprise Systems (ICORES), pages 205–212.
Zais, M. and Zhang, D. (2015). A markov chain model of
military personnel dynamics. International Journal of
Production Research, 54:1–23.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
46
