
Simulation Analysis of Evacuation Guidance
Using Dynamic Distributed Signage
Akira Tsurushima
a
Intelligent Systems Laboratory, SECOM CO., LTD., Japan
Keywords:
Crowd Evacuation, Dynamic Evacuation Guidance, Distributed Problem Solving, Multi-Agent Simulation.
Abstract:
Evacuation guidance systems must be adaptive and distributed in the unstable and harsh environment of dis-
aster evacuation. Numerous dynamic evacuation guidance systems have been proposed and studied; however,
few of them focus on the unstable evacuation environment that makes computer systems unreliable and mal-
functioning. In this study, we introduce a distributed algorithm for a dynamic evacuation guidance system to
ensure safe and efficient evacuation, even in the face of system component failures. The system is designed to
be resilient, allowing it to continue functioning, providing effective evacuation guidance despite partial system
malfunctions. Simulation experiments showed that the distributed system can provide more efficient evacua-
tion guidance than static guidance systems. Furthermore, it correctly guided evacuees in situations where the
target exit changed during the evacuation, showcasing the system’s adaptability and effectiveness in handling
unforeseen challenges, including system failures.
1 INTRODUCTION
Numerous studies have been conducted on crowd
evacuations, and many devices and systems have been
proposed and developed to support efficient evacua-
tion. Several researchers are currently studying dy-
namic evacuation guidance systems that provide ef-
ficient advice on evacuation paths to evacuees con-
sidering the dynamic evacuation environments in real
time. These systems typically include sensors and
interface devices. Sensors are employed to acquire
local information regarding risks and threats, such
as congestion caused by evacuees, smoke, or harm-
ful gases produced by fire or hazard levels owing to
collapsed pathways. Interface devices such as smart-
phones, personal digital assistants (PDAs), and digital
signage are used to advise evacuees about the paths
they should follow.
A dynamic evacuation guidance system must
function effectively in harsh environments that can
damage its components, which is challenging. There-
fore, it is unrealistic to expect that all system compo-
nents will function as intended. For example, the de-
vices, information lines, or sensors may fail, become
disconnected, or generate inaccurate information, re-
spectively. Thus, the system design should allow it to
a
https://orcid.org/0000-0003-2711-297X
function despite damaged components. Although the
system may not perform perfectly under these condi-
tions, a single point of failure that can cause the entire
system to malfunction should not exist.
Thus, it is important to design dynamic evacua-
tion guidance systems in a decentralized manner to
ensure effective functionality under harsh conditions,
which can prevent a single component or failure from
causing the entire system to malfunction. This type
of system typically has the following two primary ob-
jectives: 1) reducing the total evacuation time by miti-
gating the congestion caused by crowds, and 2) adapt-
ing evacuation routes to the dynamic environment. In
this study, we present a distributed algorithm that uses
only local information for effectively guiding evac-
uees in indoor situations. Assuming that all compo-
nents operate without malfunctions, we focused on
how a distributed system equipped with our algorithm
can efficiently guide crowds to achieve these objec-
tives. We did not consider the scenarios in which cer-
tain components of the system may malfunction.
2 RELATED WORK
The intelligent active dynamic signage system
(IADSS) was developed as part of the GETAWAY
project to overcome the many shortcomings of the
Tsurushima, A.
Simulation Analysis of Evacuation Guidance Using Dynamic Distributed Signage.
DOI: 10.5220/0012268100003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 179-188
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
179
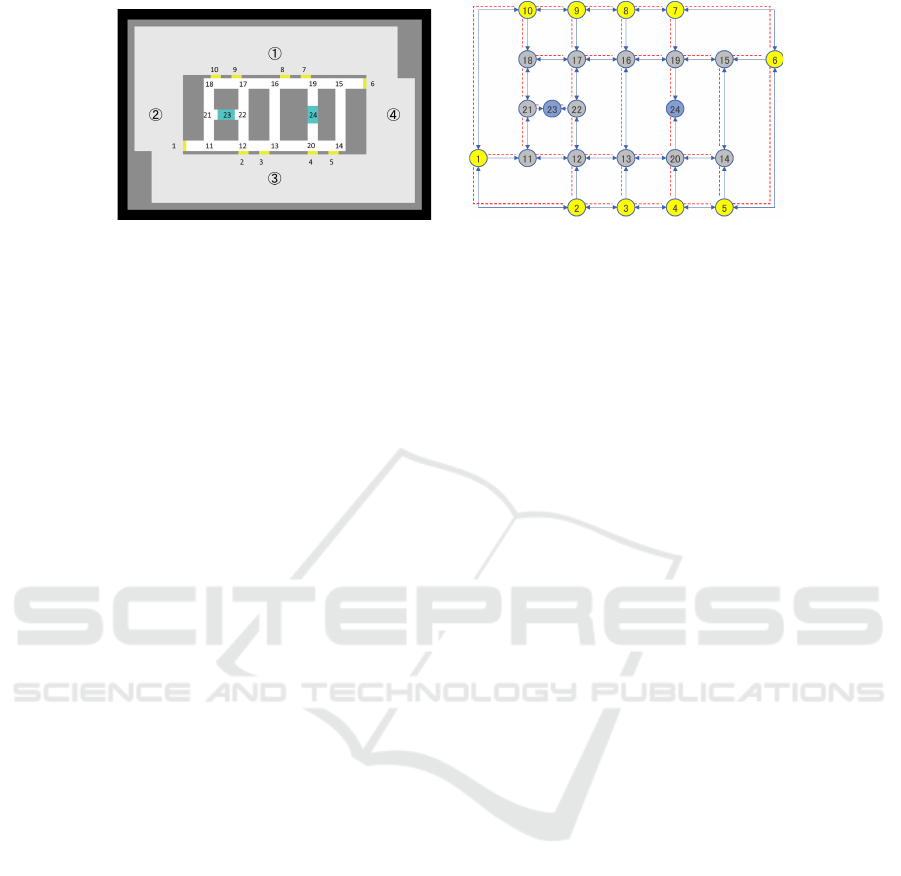
(A) (B)
Figure 1: (A) Example floor plan. (B) Graphical representation of the floor plan.
widely used static signage systems for crowd evac-
uation guidance. IADSS was tested at the Sant Cu-
gat Station in Barcelona, Spain with 1356 volunteers,
demonstrating its effectiveness in crowd evacuation
(Galea et al., 2014; Galea et al., 2017). The suc-
cess of this project gained the attention of several re-
searchers, and numerous studies have been conducted
on dynamic evacuation signage systems. Lin et al. in-
vestigated the effectiveness of IADSS on more com-
plex structures by using a fire dynamics simulator
(Lin et al., 2017).
While IADSS was designed to draw the atten-
tion of the evacuees to signage information, studies
have focused on the dynamic pathfinding of evac-
uees. Researchers have proposed dynamic route se-
lection techniques, such as a combination of graph-
based route representation, simulation-based evalu-
ation techniques (Cisek and Kapalka, 2014), and
density-based route selection techniques (Bernardini
et al., 2016).
Subsequently, numerous optimization techniques
have been developed for dynamic pathfinding evac-
uation, such as the combination of crowd modeling
and artificial immune system-based route optimiza-
tion (Khalid and Yusof, 2018), shortest pathfinding
using the Dijkstra algorithm (Baidal et al., 2020),
and a two-layer approach of dynamic sign assign-
ment and pedestrian assignment (Li et al., 2022). Xue
et. al. proposed a machine-learning technique us-
ing reinforcement learning (DQN) and evaluated its
efficiency against the Dijkstra algorithm (Xue et al.,
2021).
Novel approaches have been proposed for imple-
menting dynamic evacuation guidance by using dis-
tributed systems. A congestion-awareness route se-
lection approach using the cell phone of an evacuee
was proposed (Kasai et al., 2017). A distributed tech-
nique using the Bellman-Ford dual subgradient algo-
rithm was developed to guide groups of evacuees to
use their cell phones (Zu and Dai, 2017). Nguyen et.
al. developed an evacuation guidance system that di-
vides a large building into several sections, calculates
the optimal routes for each section, and subsequently
generates the overall evacuation routes by coordinat-
ing these local sub-routes (Nguyen et al., 2022). A
distributed architecture for real-time evacuation guid-
ance that considers envy-freeness was proposed (Lu-
jak et al., 2017). These studies generally focused on
reducing the complexity of computing the global op-
timum and achieving system scalability.
In a pioneering study, Zhao et al. proposed that
each node of the distributed evacuation guidance sys-
tem independently calculates its direction of evacua-
tion and shares this information with its neighboring
nodes to develop the overall evacuation routes (Zhao
et al., 2022). The system does not contain a single
point of failure that controls the entire system, thus
ensuring that it will continue to function despite cer-
tain components failing, which is expected in harsh
environments during disaster evacuation. However, a
detailed algorithm and its analysis were not clearly
presented in their paper, and the performance of the
distributed system was evaluated only in terms of fire
detection time against a theoretical worst-case sce-
nario.
In this study, we formulated a distributed evacua-
tion guidance problem and proposed a distributed al-
gorithm to generate the overall evacuation route. We
also evaluated the performance of the distributed sys-
tem in terms of congestion mitigation and adaptation
to environmental changes using multi-agent simula-
tions.
3 PROBLEM
Fig. 1(A) illustrates the evacuation environment (Tsu-
rushima, 2022a) with the coordinate (x, y) ∈ R
1
× R
2
where R
1
= [−39, 41], R
2
= [−26, 24], which repre-
sents the positions in the environment used in this
study. The environment consisted of a central core
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
180

(dark gray square), with exits (depicted in blue with
numbers), aisles (white), corners (depicted by num-
bers), and the surrounding space (light gray). Doors
connecting the surrounding space and aisles in the
central core are depicted in yellow, which evacuees
in the surrounding space can use to move to the aisles
and evacuate to the exits. Evacuation signs, which can
advise evacuees regarding the directions for their next
moves, are positioned in front of doors (1, . . . , 10), at
corners (11, . . . , 22), and at two exits (23 and 24). Al-
though not clearly illustrated, the environment con-
tained sensors that indicate the levels of danger, such
as congestion, smoke, or toxic gases produced by fire
in the aisles and spaces near the doors.
Fig. 1(B) presents a graphical representation of
Fig. 1(A). The nodes represent the doors, corners,
and exits. The edges represent the corresponding
aisles or regions in the surrounding space. The nodes
in the figure also represent the evacuation signs po-
sitioned at the corresponding doors, corners, or ex-
its. These signs and their positions can be interpreted
interchangeably. The red dotted lines represent the
communication channels between the two evacuation
signs. The topologies of the aisles and device con-
nections in the example are the same, which is not re-
quired in general cases. The blue arrows in the figure
represent the directions of the next moves of the evac-
uees or the directions displayed on evacuation signs.
For example, at door 1, an evacuee has three direction
choices: door 2, door 10, and corner 11; the evacua-
tion sign on door 1 indicates either one of doors 2, 10,
or 11. The danger level in each region can be repre-
sented by the weights of the corresponding edges in
the graph.
Each evacuation sign, which is a computational
process in the system, acquires danger levels on the
edges connecting the adjacent nodes using sensors,
delivers data through communication channels, and
displays the evacuation direction to adjacent nodes.
Every evacuation sign functions autonomously and
independently.
In this study, given the floor layout illustrated
in Fig. 1, we investigated the generation of effi-
cient evacuation plans for a dynamic evacuation envi-
ronment using independently functioning evacuation
signs. The study had two objectives: 1) to reduce
the total evacuation time by mitigating the congestion
caused by evacuees and 2) adapt to evacuation routes
by considering dynamic environmental hazard levels.
3.1 Formulation
Consider the graph
¯
G = (V,
¯
E,W ) depicted in
Fig. 1(B) with red dotted lines. Nodes V =
{1, 2, . . . , 24} represent evacuation signs, undirected
edges {i, j} ∈
¯
E represent the communication chan-
nel between evacuation signs, and ordered lists W =
(w
1
, . . . , w
k
, . . .) represent the weight values w
I (i, j)
given by the corresponding sensors, where I : V ×
V → N maps i, j to index k in an ordered list. The
weighted values represent the cost or level of danger
at the edge if the evacuee uses an edge as part of the
evacuation route; an evacuee should choose an evac-
uation route with a lower cost. w
k
and w
{i, j}
can be
expressed interchangeably only if there is no confu-
sion. Furthermore, w
{i j}
> 0 and w
{i, j}
= w
{ j,i}
.
In this study, we made the following assumptions:
1.
¯
G is a connected graph.
2. Any node i ∈ V can communicate with the adja-
cent nodes j ∈ { j ∈ V |{i, j} ∈
¯
E} and the sensors
immediately associate with w
{i, j}
.
3. All evacuation signs, sensors, and communication
channels function without malfunctions.
1) indicates that any two nodes i and j on
¯
G have
at least one path; i, . . . , j is denoted by (i, j). 2) shows
that i can communicate with the adjacent node
´
i on
the path (i, j), for example, i,
´
i, . . . , j, which implies
that i can communicate with any node on path (i, j)
if i is replaced with
´
i. Node i can also communicate
with any sensor because all the sensors on
¯
G are con-
nected to at least one node on
¯
G and we assume that
all the devices operate without malfunctions from 3).
Accordingly, we make the following assumption:
Assumption 1. Any node i on
¯
G can instantly com-
municate with any other node j and sensor w
{i, j}
on
¯
G.
Assumption 1 does not hold for real evacuation situa-
tions; however, in this paper, we discuss all the tech-
nical details under this assumption for simplicity.
We now consider a directed graph G = (V, E,W ),
as shown in Fig. 1(B), with blue arrows, where e
k
∈
E is the directed edge e
k
= (i, j), which represents a
set of adjacent nodes j, where evacuation sign i can
point out or an evacuee at i can select the next move.
Finally, we introduce a set of exits, V
g
= {23, 24}.
Given the dynamic nature of the problem stated
in this section, namely E and W continuously vary
and may need to be denoted temporally, for example,
as E(t) and W(t). However, for simplicity, E and W
are considered and treated as static information un-
til Section 5. The dynamic nature of the problem is
examined in Section 6; both E and W are treated as
dynamic information in this section.
Definition 1. We call G a universal evacuation graph.
The set of nodes on G being pointed out by i, which in-
dicates any possible direction that an evacuee in i can
choose, is denoted by ∆ : V → 2
V
, j ∈ ∆(i), (i, j) ∈ E.
Simulation Analysis of Evacuation Guidance Using Dynamic Distributed Signage
181

(A)
(B)
Figure 2: (A) Evacuation graph with cycles. (B) Graph rep-
resentation of evacuation graph with cycles.
Definition 2. We call
˙
G = (V,
˙
E,
˙
W ) a evacuation
graph, where
˙
E = {(i, j) ∈ E} denotes the set of edges
when an evacuation sign i points to an adjacent evac-
uation sign j and a set of corresponding edge weights
˙
W . The evacuation sign indicated by i on
˙
G is denoted
by δ : V → V, (i, δ(i)) ∈
˙
E.
Note that δ(i) ∈ ∆(i).
Corollary 1. Given evacuation graph
˙
G,
˙
E ⊂ E,
˙
W ⊂
W , where |V | − |V
g
| = |
˙
E| = |
˙
W | and ∀i ∃ j (i ∈ {V \
V
g
}, (i, j) ∈
˙
E).
A evacuation graph is a graph in which each evac-
uation sign i advises evacuees to a specific evac-
uation route by pointing to an adjacent evacuation
sign (node); each evacuation sign points to only one
node. Now, we consider the special case of evacua-
tion graphs.
3.2 Cycle
Definition 3. We denote
¨
G = (V,
¨
E,
¨
W ), where
¨
E =
{(i, j) ∈
˙
E |
˙
E is acyclic}, an efficient evacuation
graph.
If we denote a tree by T = (V, E,W ), the follow-
ing lemma holds.
Lemma 1. An efficient evacuation graph can be rep-
resented as
¨
G = {T
1
, . . . , T
|V
g
|
}, where T
i
is a tree with
element V
g
as its root.
Proof. We divide
¨
G = (V,
¨
E,
¨
W ) into
¨
G =
{G
1
, . . . , G
|V
g
|
}, V = {V
1
, . . . ,V
|V
g
|
},
¨
E =
{
¨
E
1
, . . . ,
¨
E
|V
g
|
}, where
¨
E
k
= {(i, j) ∈
¨
E | i, j ∈
V
k
}, ∄(i, j) (i ∈ V
m
, j ∈ V
n
, m ̸= n) (
¨
W is di-
vided in the same manner as
¨
E). Corollary 1
indicates that |V | − |V
g
| = |V
1
| + . . . + |V
|V
g
|
| − |V
g
| =
|V
1
| − 1 + . . . + |V
|V
g
|
| − 1 = |
¨
E
1
| + . . . + |
¨
E
|V
g
|
| = |
¨
E|.
Now, we have |
¨
E
k
| = |V
k
| − 1 because |V
k
| has only
one element of |V
g
| and
¨
E
k
does not have a cycle
(Definition 3). Therefore, G
k
= T
k
= (V
k
,
¨
E
k
,
¨
W
k
)
represents a tree with element V
g
as a root.
(A)
(B)
Figure 3: (A) Evacuation graph without cycles. (B) Graph
representation of evacuation graph.
In this section, we discuss how the evacuation
graphs with and without cycles affect the evacuation
guidance results using two examples.
Fig. 2 (B) presents an evacuation graph with two
cycles: 12, 13, 16, 17, 22 and 6, 7 illustrated by red
arrows; blue arrows indicate evacuation routes from
doors to exits. Fig. 2 (A) presents the assignment
of evacuation directions displayed by each evacuation
sign associated with evacuation graph (B) at each lo-
cation in the floor plan. The dark blue regions in (A)
indicate the regions where traffic jams are caused by
the evacuees when the evacuation simulations were
performed using evacuation graph (B). By comparing
these two figures, we observed that the congestion of
the evacuees occurs when the cycles are formed in the
evacuation graph.
Fig. 3 (B) depicts an evacuation graph without cy-
cles (efficient evacuation graph). This graph has no
red arrows and consists of two trees whose roots are
exits (Lemma 1). Fig. 3 (A) presents the evacuation
simulation results in the floor plan corresponding to
efficient evacuation graph (B). There are no dark blue
areas in this figure, indicating that evacuees did not
cause traffic jams.
According to the simulation results, severe con-
gestion can occur when the evacuation graph includes
cycles. Therefore,
Requirement 1. the formation of cycles in the evac-
uation graph should be avoided in evacuation guid-
ance,
despite the individual evacuation signs independently
generating the evacuation routes using only local in-
formation.
In addition, the cycles on the evacuation graph do
not lead the evacuees to any exits, giving them the im-
pression that the system is inconsistent and resulting
in a loss of confidence in the system. This is another
reason the cycles on the evacuation graph should be
avoided.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
182
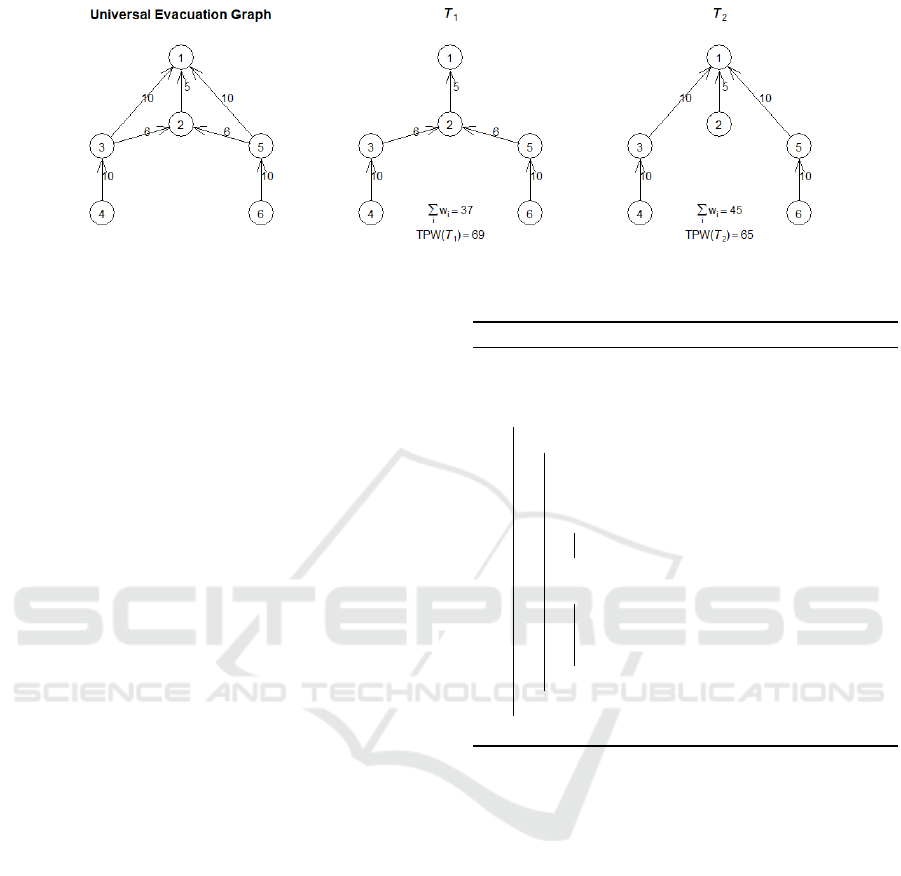
Figure 4: Universal evacuation graph (left). Minimum spanning tree (center). Minimum efficient evacuation graph (right).
3.3 Edge Weight
Considering the universal evacuation graph presented
on the left in Fig. 4, suppose that node 1 is the exit
and the numbers on the edges are the weight values
representing the costs or levels of danger in evac-
uation routes, such as congestion, smoke, or toxic
gases. A route with a lower weight was preferred.
T
1
(the center of Fig. 4) is the minimum spanning
tree of the universal evacuation graph, whose weight
is
∑
i
w
i
= 37. T
2
(right-hand side of Fig. 4) is an-
other spanning tree of the universal evacuation graph
whose weight is
∑
i
w
i
= 45, which is not the min-
imum. Let us denote the path from i to j on tree
T (i, j), and the total weights of the edges on the path
weight(T (i, j)). Subsequently, ∀i weight(T
1
(i, 1)) ≥
weight(T
2
(i, 1)). For example, weight(T
1
(4, 1)) = 21
and weight(T
2
(4, 1)) = 20; the latter is smaller than
the values of the former. Thus, to implement an ef-
ficient evacuation guidance we must determine evac-
uation routes consisting of trees with minimum route
weights, as shown for T
2
in Fig. 4.
We define the total path weight (TPW ) of tree T
as follows:
Definition 4. T PW (T ) =
∑
i∈V \{g}
weight(T (i, g)),
where g denotes the exit node of T .
We also define TPW of the efficient evacuation
graph
¨
G = {T
1
, T
2
, . . .} as follows:
Definition 5. T PW (
¨
G) =
∑
j
T PW (T
j
).
Definition 6. We call an efficient evacuation graph
with a minimum TPW a minimum efficient evacuation
graph G
∗
.
Now, we have an evacuation guidance problem,
that is, min T PW (
¨
G) s.t.
¨
G ∈
¨
G, where
¨
G is a set of
efficient evacuation graphs. To implement an efficient
evacuation guidance
Requirement 2. we must find the minimum efficient
evacuation graph on a universal evacuation graph.
Algorithm 1: Broadcast.
Local Variable:
b
˙
E,
b
W ,
b
T
1 Function
Broadcast(o, i, δ(o), t, Ω
W
, ϒ
W
):
2 if
b
T [o] < t then
3
b
T [o] ← t;
4
b
˙
E[o] ← δ(o);
5 foreach j ∈ 1, . . . , |Ω
W
| do
6
b
W [Ω
W
[ j]] ← ϒ
W
[ j]
7 end
8 foreach a ∈ ∆(i) do
9 Call
Broadcast(o, a, δ(o), t, Ω
W
, ϒ
W
)
on node a
10 end
11 end
12 end
4 DISTRIBUTED ALGORITHM
Evacuation guidance systems must operate under ex-
treme conditions where not all components are ex-
pected to function as intended;
Requirement 3. the system should be resilient, have
no single point of failure, and be distributed.
In this section, we present a distributed algorithm
satisfying Requirement 1 – 3 under Assumption 1.
Each universal evacuation graph node is equipped
with the algorithm that repeatedly executes at cer-
tain intervals; the algorithm is distributed but not fully
asynchronous. The proposed algorithm consists of
two steps: 1) Broadcast , which propagates local in-
formation throughout the graph, and 2) UpdateSign ,
which determines the optimal evacuation routes based
on the information provided by Broadcast .
Simulation Analysis of Evacuation Guidance Using Dynamic Distributed Signage
183
4.1 Broadcast
Broadcast collects local information, including the
current pointing direction of node i and the edge
weights obtained from the connected sensors, and dis-
tributes them to all the adjacent nodes. Each node
repeatedly broadcasts this information throughout the
graph, and all the other nodes acquire them to con-
struct a local image of the global graph. We assume
that the times at which the nodes broadcast vary but
all the nodes finish broadcasting within a certain pe-
riod. At this point, all the nodes have local images
of the global graph
b
G = (V,
b
˙
E,
b
W ). We assume that
each node has local variables
b
˙
E,
b
W ,
b
T , and ∆i.
b
T is
an ordered list containing the last broadcast reception
times of all the nodes, and
b
T [i] presents the ith ele-
ment of the ordered list
b
T . It also has two other or-
dered lists: Ω
W
to hold the edge indices of
b
W and
2) ϒ
W
to maintain their corresponding values, which
contain the local edge weights collected by node i.
Broadcast at node i is presented in Algorithm 1,
where the originator node is indicated by o, the node
id is i, the current direction of the originator is δ(o),
and the time at which the originator sent the broadcast
is t. Broadcast is a simple flooding algorithm that re-
quires 2|
¯
E||V | − |V |
2
+|V | communications to update
the given value of universal evacuation graph.
4.2 UpdateSign
Algorithm 2: UpdateSign.
Local Variable:
b
˙
E,
b
W , δ(i)
1 Function UpdateSign(i):
2 l
∗
ig
← Search(i,
b
W );
3 (i, next) ← l
∗
ig
[1];
4
b
˙
E[i] ← (i, next);
5 if
b
˙
E include a cycle then
6 call UpdateSign(next) on next;
7 await
b
˙
E ← UpdateSign(next) from
next
8 end
9 δ(i) ←
b
˙
E[i];
10 return
b
˙
E
11 end
Given a set of weights
b
W (t) at any point in time t,
our algorithm generated a series of efficient evacua-
tion graphs and converged to the minimum efficient
evacuation graph as below.
¨
G
1
→
¨
G
2
→ . . . → G
∗
where T PW (
¨
G
n
) ≥ T PW (
¨
G
n+1
)
¨
G
n
→
¨
G
n+1
demonstrates that by executing the al-
gorithm, node i in
¨
G
n
pointing to node j changes its
pointing direction to another node
´
j, resulting in the
transformation of
¨
G
n
into
¨
G
n+1
, which is also an effi-
cient evacuation graph.
In reality, each node executes its algorithm at dif-
ferent times and the local image varies from node-
to-node because
b
W represents an evacuation environ-
ment, which is dynamic. UpdateSign at each node
searches for the evacuation routes with a minimum
TPW for different graphs, resulting in inconsistent
evacuation routes which may include cycles. There-
fore, UpdateSign requires a mechanism to break the
cycles when it finds cycles on the evacuation graph.
Subsequently, we consider the case in which node
i ∈ T
k
on
¨
G = {T
k
, T
l
} (Lemma 1) changes its point-
ing direction to the other nodes step-by-step. Edge
(i, j) is removed from
¨
G (STEP 1) and a new edge
(i,
´
j) is added to the resulting graph (STEP 2).
After STEP 1, because the tree has minimal con-
nectivity, T
k
is split into two trees: T
P
k
, which ex-
cludes node i, and T
C
k
, which includes node i as its
root.
Theorem 1. A graph consisting of three trees was ob-
tained.
e
¨
G = {T
P
k
, T
C
k
, T
l
} after STEP 1.
By adding a new edge (i,
´
j) to
e
¨
G in STEP 2, the
following theorem holds:
Theorem 2. When node i on T
k
changes its pointing
direction from j to
´
j, the resulting graph
¨
G
new
is an
efficient evacuation graph only if
´
j ∈ T
l
and
´
j ∈ T
P
k
.
Proof. In these three cases, a new edge (i,
´
j) is added
to
e
¨
G = {T
P
k
, T
C
k
, T
l
} (Theorem 1).
1.
´
j ∈ T
l
. Both T
C
k
and T
l
are trees, and the resulting
graph
´
T
l
created by adding an edge from the root of
T
C
k
to any node of T
l
is also a tree. Therefore,
¨
G
new
=
{T
P
k
,
´
T
l
} is an efficient evacuation graph.
2.
´
j ∈ T
P
k
. Both T
C
k
and T
P
k
are trees and the resulting
graph
´
T
k
created by adding an edge (i,
´
j) is also a tree.
Therefore,
¨
G
new
= {
´
T
k
, T
l
} is an efficient evacuation
graph.
3.
´
j ∈ T
C
k
.
´
j is any node on T
C
k
except i. One path
exists between i to
´
j on T
C
k
because it is a tree. Thus,
adding a new edge (i,
´
j) will form a cycle on T
C
k
.
Therefore, G
new
∈ {
˙
G \
¨
G} is not an efficient evac-
uation graph.
Let l
i j
= ((i, i
1
), (i
1
, i
2
), . . . , (i
n−1
, j)) be a path
from node i to node j in graph G. The weight of path
l
i j
is denoted by weight(l
i j
), given by weight(l
i j
) =
∑
(i, j)∈l
i j
w
(i j)
, where w
(i j)
∈ W represents the weights
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
184

associated with the edges in W . The path with the
minimum weight is denoted as l
∗
i j
, and its weight as
w
∗
(i j)
= weight(l
∗
i j
). Let l
∗
ig
, g ∈ V
g
represent the path
with the minimum TPW from node i to one of the
exits on graph G, and suppose we have a function
Search(i,
b
W ) that determines l
∗
ig
in graph G with
b
W .
The distributed algorithm UpdateSign at node i
that converges to G
∗
is given by Algorithm 2. Local
Variable: in Algorithm 2 presents the local variables
available at node i. Node i executes U pdateSign(i)
on itself when it starts the algorithm, and
b
˙
E returned
by the algorithm contains the updated routes with a
minimum TPW .
5 ANALYSIS
In this section, an analysis of the proposed algorithm
is presented under Assumption 1 assuming that W re-
mains unchanged.
Theorem 3. UpdateSign stops after a finite number
of steps.
Proof. Under Assupmtion 1, UpdateSign will only
stop if the next node in line 7 of Algorithm 2 does not
return. Suppose Search in line 2 finds path l
∗
ig1
with
a minimum TPW from node i to exit g1. This occurs
when a certain node j on l
∗
ig1
recursively calls node i
in line 6 of UpdateSign . There are two possible sce-
narios. First, node j finds the path from j to g1 such
that l
∗
jg1
= ( j, . . . , i, . . . , g1). w
∗
( j,g1)
= w
∗
( j,i)
+ w
∗
(i,g1)
because w
∗
( j,g1)
is a minimum. However, w
∗
(i,g1)
=
w
∗
(i, j)
+w
∗
( j,g1)
= w
∗
(i, j)
+w
∗
( j,i)
+w
∗
(i,g1)
, which leads to
w
∗
(i,g1)
= 2w
∗
(i, j)
+ w
∗
(i,g1)
because w
(i, j)
= w
( j,i)
. This
contrasts with the definition w
(i, j)
> 0. Second, node
j finds the path with a minimum TPW from j to g2
such that l
∗
ig2
= ( j, . . . , i, . . . , g2), where g2 is the other
exit. Because l
∗
ig1
= (i, . . . , j, . . . , g1) has the minimum
TPW , w
∗
(i,g1)
= w
∗
(i, j)
+ w
∗
( j,g1)
≤ w
∗
(i,g2)
. However,
node j also has path l
∗
jg2
with a minimum TPW w
∗
( j,g2)
which includes node i; therefore, w
∗
( j,g2)
= w
∗
( j,i)
+
w
(i,g2)
≤ w
∗
( j,g1)
. Now, w
∗
(i, j)
+ w
∗
( j,g1)
≤ w
∗
( j,g1)
−
w
∗
( j,i)
, which leads to w
∗
(i, j)
+ w
∗
( j,i)
≤ 0. This is con-
trary to the definition w
(i, j)
> 0. Thus, line 7 of Algo-
rithm 2 must return.
Theorem 4. UpdateSign always generates efficient
evacuation graphs.
Proof. Theorem 2 indicates that
˙
E is not an efficient
evacuation graph only if node i points to node j such
that j ∈ T
C
k
. However, in this case, line 5 of Al-
gorithm 2 ensures that
˙
E passes recursively to Up-
dateSign on the adjacent node. Theorem 3 indicates
that this recursive call stops after a finite number of
steps, and
¨
E returns to line 7 in Algorithm 2 and
does not include l
∗
ig
that recursively contains i. Thus,
UpdateSign always generates an efficient evacuation
graph.
Consider a system S in which each evacuation sign
has an UpdateSign and executes it randomly.
Theorem 5. System S generates a series converging
on minimum efficient evacuation graph such that
¨
G
1
→
¨
G
2
→ . . . → G
∗
where T PW (
¨
G
n
) ≥ T PW (
¨
G
n+1
)
Proof. Consider that node i on T
old
on
¨
G executes
UpdateSign . We have
¨
G = {T
P
old
, T
C
old
, T
l
} (Theo-
rem 1) and let T
new
be a new tree having node i after
executing UpdateSign . T
new
is generated using the
method given in Cases 1 and 2 in the proof of Theo-
rem 2. First,
´
j ∈ T
l
. Let the exits before and after Up-
dateSign be g and ´g, respectively, which differ from
one another. T PW (T
old
(i, g)) ≥ T PW (T
new
(i, ´g)) be-
cause Search in line 2 of UpdateSign determines the
path with the minimum TPW . As both T
P
old
and T
l
remain unchanged, and T
C
old
is a tree with root i, the
following relationships hold for all the nodes k in T
C
old
except i:
T PW (T
new
(k, ´g))
= TPW (T
new
(k, i)) + T PW (T
new
(i, ´g))
≤ TPW (T
new
(k, i)) + T PW (T
old
(i, g))
= TPW (T
C
old
(k, i)) + T PW (T
old
(i, g))
= TPW (T
old
(k, g)).
Second,
´
j ∈ T
P
old
. In this case, exit g remains un-
changed. T PW (T
old
(i, g)) ≥ T PW(T
new
(i, g)), and
T
P
old
and T
l
also remain unchanged, yielding in the
same manner T PW (T
old
( j, g)) ≥ T PW (T
new
( j, g)).
Therefore, T PW (
¨
G
old
) ≥ T PW (
¨
G
new
). Furthermore,
Theorem 4 yields that UpdateSign always generates
efficient evacuation graph, and the series above is ob-
tained.
Theorem 6. UpdateSign is self-stabilizing.
Proof. Suppose that system S begins from an initial
graph with cycles G
init
∈ {
˙
G \
¨
G}. At a certain point,
node i executes UpdateSign in a cycle. Search in line
2 of Algorithm 2 will find a path to an exit l
∗
ig
; subse-
quently, line 5 of the algorithm finds where i denotes
the cycle. It recursively calls UpdateSign on the next
node of l
∗
ig
in line 6. However, this recursive call ter-
minates in a finite number of steps according to The-
orem 3. At this point, a cycle must be broken owing
Simulation Analysis of Evacuation Guidance Using Dynamic Distributed Signage
185
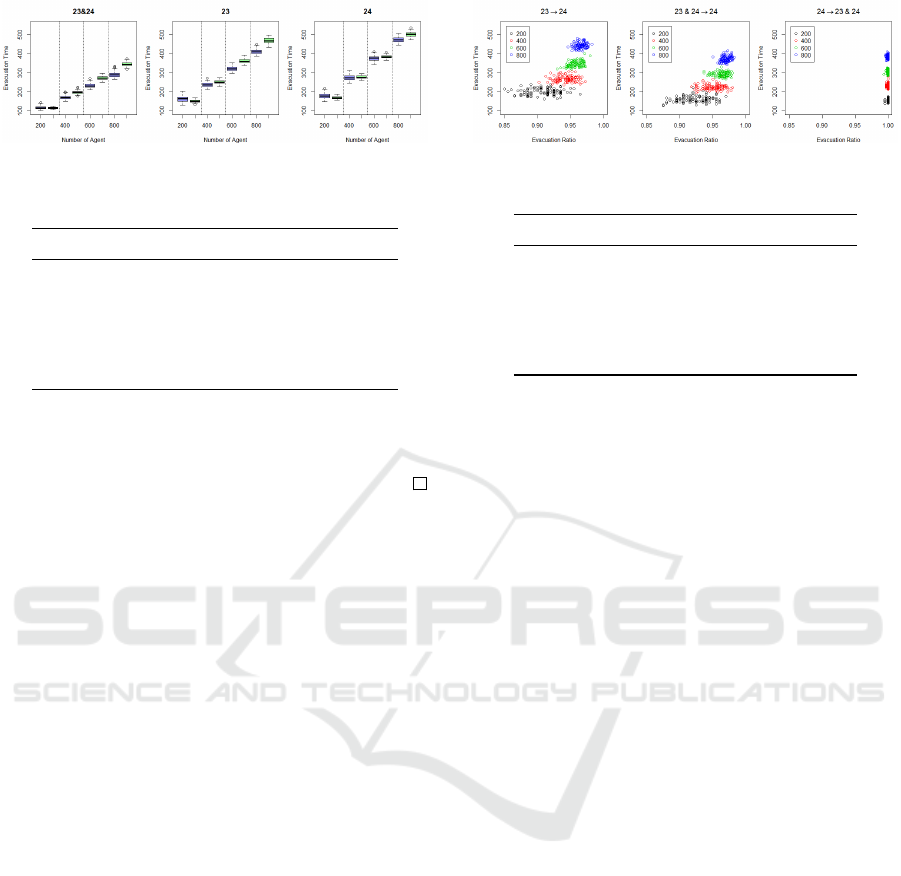
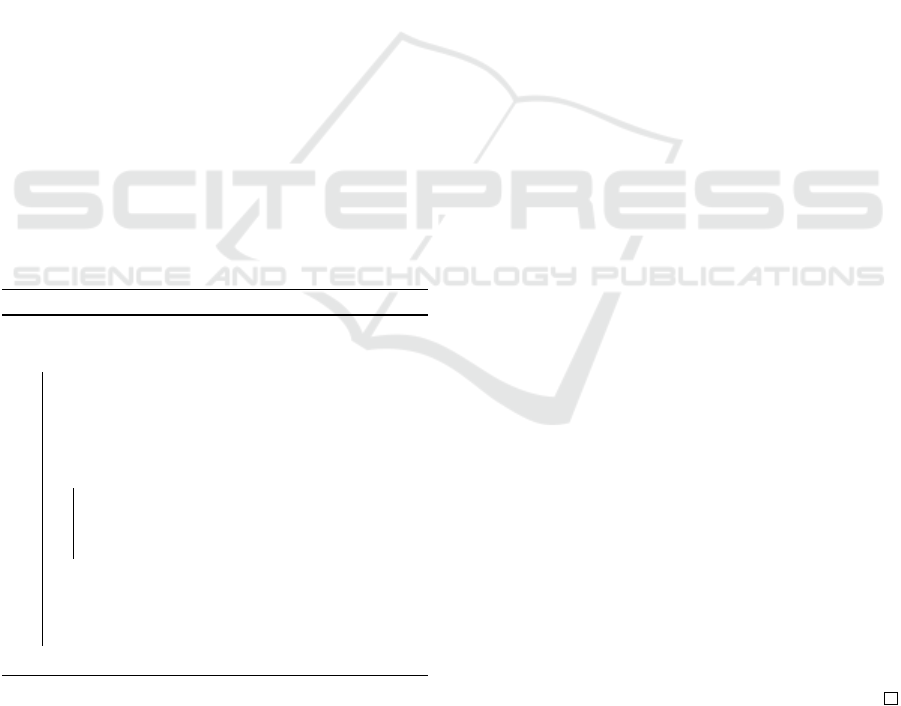
Figure 5: Mitigating Congestions.
Table 1: Mean evacuation time in Fig. 5.
Scenario 200 400 600 800
23&24 dynamic 117.8 172.0 233.6 290.6
static 116.2 198.1 272.7 345.5
23 dynamic 164.3 238.0 322.3 410.9
static 152.2 251.5 361.4 468.5
24 dynamic 178.8 275.3 377.0 473.0
static 170.4 277.4 384.4 501.2
to Theorem 4; a series from G
init
to
¨
G is formed. The-
orem 5 ensures that the series never forms a cycle and
generates only efficient evacuation graphs. Thus, Up-
dateSign is self-stabilizing.
The evacuation environment is constantly chang-
ing and evacuees always move to different locations;
thus, W is constantly changing information and it is
usually not possible to obtain a minimum efficient
evacuation graph. Despite considering these facts,
Theorem 4 ensures that UpdateSign always generates
efficient evacuation graphs.
Corollary 2. System S generates a series of efficient
evacuation graphs, despite W being dynamical.
6 EXPERIMENT
Thus far, we have treated E and W as static informa-
tion for simplicity, whereas in real situations they are
dynamic. Both the evacuees and evacuation signs are
autonomous entities that affect one another, compli-
cating the prediction of the overall behavior of the
system, for example, the evacuation may never end
owing to oscillations caused by these two entities. In
this section, we treat E and W as dynamic informa-
tion and evaluate the performance of the dynamic dis-
tributed signage system using multi-agent simulations
(Wilensky, 1999) assimilating real evacuation situa-
tions.
6.1 Mitigating Congestion
Evacuation simulation experiments were conducted
to investigate the effectiveness of the dynamic sig-
nage system in reducing congestion during evacua-
Figure 6: Adapting the Evacuation Route.
Table 2: Mean evacuation time and ratio in Fig. 6.
Scenario 200 400 600 800
23 ratio 0.91 0.94 0.96 0.97
time 201.7 267.7 346.7 443.8
23&24 ratio 0.92 0.95 0.96 0.97
time 162.1 225.2 293.5 372.8
24 ratio 1.00 1.00 1.00 1.00
time 157.1 234.6 306.1 383.4
tions. We highlighted these results by comparing
them with those of a static signage system. To create
congestion during evacuation, evacuation agents were
initially placed in
1
⃝ and
2
⃝, as shown in Fig. 1(A);
3
⃝ and
4
⃝ were left empty. We also assumed w
{i, j}
=
d(n − 1) > 0, where d is the length of the edge {i, j}
and n is the number of agents currently on {i, j}.
To illustrate the effects of the dynamic signage
system, we use an agent with a simple random choice
model as follows:
1. When the agent is in the surrounding space, it will
randomly select doors that are visible from its lo-
cation, for example, if the agent is at
1
⃝, it will
randomly select doors 7–10.
2. When the agent is at a corner in the central core,
it will randomly select a direction, as indicated by
the blue arrows in Fig. 1(B), for example, if the
agent is at corner 12, it will randomly select di-
rections 11, 13, or 22.
3. If the agent is in the central core and there is an
evacuation sign in its field of view, the agent will
follow the evacuation sign rather than make a ran-
dom selection.
The results of the three scenarios, including both
available, Exit 23 available, and Exit 24 available, are
shown in the left, center, and right diagrams in Fig. 5,
respectively, and are summarized in Table 1. In this
figure, the x-axis indicates the number of evacuation
agents, that is, 200, 400, 600, and 800; the y-axis rep-
resents the evacuation time. A total of 100 simula-
tions were conducted for each case. We plotted the
results for the static signage system in green, and the
dynamic signage system in blue.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
186

6.2 Adapting the Evacuation Route
We also conducted experiments to investigate how the
dynamic signage system adapts evacuation routes to
dynamic environments. In this setting, Exit 23 was
initially the only available exit; however, the available
exit changed to Exit 24 when half of the evacuees ex-
ited. The evacuation graph possessed by each node
changes immediately at this point. We measured the
ratio of agents who evacuated via an available exit;
the agents evacuated via Exit 23 in the first half of the
simulation and via Exit 24 in the second half. The
following two other variations of the scenario were
examined: 1) Both exits were initially available, fol-
lowed by Exit 24 being the only available exit. 2)
Exit 24 was initially the only exit available, followed
by both exits becoming available .
The results of the three scenarios are presented in
Fig. 6. The results of the scenarios in which Exits
23, 23&24, and 24 were initially available are shown
in the left, center, and right diagrams of Fig. 6 and the
means of these results are summarized in Table 2.
7 RESULT AND DISCUSSION
Fig. 5 reveals that by comparing the static (green) and
dynamic (blue) evacuation signs, the latter generally
provides a shorter evacuation time, as the blue plots
are below the green plots. However, when the num-
ber of evacuation agents is small (e.g., 200), the static
evacuation signs tend to provide shorter evacuation
times compared with the dynamic evacuation signs,
confirming the effectiveness of the dynamic evacua-
tion signs when the number of evacuees is large and
congestion was anticipated. This suggests that dy-
namic evacuation signs may incur certain costs in
evacuation guidance, such as additional time owing
to collisions and confusion among the evacuees, re-
sulting in longer evacuation times.
Fig. 6 demonstrates that our algorithm could guide
approximately 90% of evacuees to the intended exits,
except when the number of evacuees was small (e.g.,
200). The figure demonstrates that as the number of
evacuees increases, the proportion of evacuees guided
to the intended exits increases. The diagram on the
right side of Fig. 6, where Exit 24 is first available fol-
lowed by both Exits 23 and 24, indicates that nearly
100% of the evacuees were directed to the intended
exit when an available exit was initially limited, af-
ter which all the exits became available. This indi-
cates that unintended steering generally occurs imme-
diately after the available exit changes, which is ow-
ing to the change in the evacuation graph possessed
by each node. This is because it is easier to direct
more evacuees to available exits if the available exit is
initially restricted and the restriction is later removed,
as shown in the right diagram in Fig 6. Theorem 6
also ensures that our algorithm can continue to gener-
ate efficient evacuation graphs despite the subsequent
turbulence caused by the change in efficient evacua-
tion graphs.
In this study, we proposed a distributed algorithm
that provides efficient evacuation guidance to miti-
gate congestion during evacuation and adapts evac-
uation routes based on the changes that occur in evac-
uation environments. One limitation of this algorithm
is that although it is decentralized, it is not fully asyn-
chronous. In actual distributed systems, each device
cannot predict whether the message it sends will be
received by the other device within a certain time, or
in the order in which they were sent. However, the de-
vice cannot predict that the task delegated to the other
device is completed, and whether the results for the
tasks are returned within a certain period. Line 7 of
Algorithm 2 assumes that the UpdateSign on the ad-
jacent node will be completed and its result will be
returned within a certain time, which is not guaran-
teed in real situations, leading to the termination of
the entire process. This is particularly critical if the
system contains faulty devices that are unable to re-
turn responses. Therefore, it is crucial to make this
algorithm asynchronous to address this problem and
analyze how the system performs in faulty environ-
ments.
Other important aspects such as human factors
were not investigated in this study. The human
decision-making process is more complex, mak-
ing evacuation behavior unpredictable, especially
wayfinding during evacuations (Lovreglio et al.,
2016; Vizzari et al., 2020; Andresen et al., 2018),
while we employed a simple agent model in the
simulations. Furthermore, the visual functions of
evacuees affect their ability to find evacuation signs
(Ding, 2020; Tsurushima, 2021; Tsurushima, 2022b).
Whether people follow an evacuation sign when it
rapidly changes directions is also critical but it has
not been tested thus far. These topics should be inves-
tigated in future studies.
8 CONCLUSION
We proposed a distributed algorithm for a dynamic
evacuation guidance system to mitigate congestion
during evacuation and to advise evacuees on evac-
uation routes that are adaptable to environmental
changes. This system has no central control mech-
Simulation Analysis of Evacuation Guidance Using Dynamic Distributed Signage
187

anism, and the devices equipped with our algorithm
only use local information and communicate with
neighboring devices. Simulation results demonstrated
that the proposed algorithm can provide evacuation
guidance, resulting in a shorter evacuation time com-
pared with static evacuation guidance; furthermore,
approximately 90% of the evacuees were guided to
the intended routes despite the available exits chang-
ing during evacuation.
ACKNOWLEDGMENT
The author would like to thank Mr. Kei Marukawa for
his assistance and helpful discussions.
REFERENCES
Andresen, E., Chraibi, M., and Seyfried, A. (2018). A rep-
resentation of partial spatial knowledge: a cognitive
map approach for evacuation simulations. Transport-
metrica A: Transport Science, 14(5-6):433–467.
Baidal, C., Arreaga, N., and Padilla, V. (2020). Design
and testing of a dynamic reactive signage network to-
wards fire emergency evacuations. International Jour-
nal of Electrical and Computer Engineering (IJECE),
10:5853.
Bernardini, G., Azzolini, M., D’Orazio, M., and
Quagliarini, E. (2016). Intelligent evacuation guid-
ance systems for improving fire safety of Italian-
style historical theatres without altering their archi-
tectural characteristics. Journal of Cultural Heritage,
22:1006–1018.
Cisek, M. and Kapalka, M. (2014). Evacuation route assess-
ment model for optimization of evacuation in build-
ings with active dynamic signage system. Transporta-
tion Research Procedia, 2:541–549.
Ding, N. (2020). The effectiveness of evacuation signs in
buildings based on eye tracking experiment. Natural
Hazards, 103.
Galea, E., Xie, H., Deere, S., Cooney, D., and Filippidis, L.
(2017). Evaluating the effectiveness of an improved
active dynamic signage system using full scale evacu-
ation trials. Fire Safety Journal, 91.
Galea, R. E., Xie, H., and Lawrence, J. P. (2014). Experi-
mental and survey studies on the effectiveness of dy-
namic signage systems. Fire Safety Science, 11:1129–
1143.
Kasai, Y., Sasabe, M., and Kasahara, S. (2017). Congestion-
aware route selection in automatic evacuation guiding
based on cooperation between evacuees and their mo-
bile nodes. EURASIP Journal on Wireless Communi-
cations and Networking, 164.
Khalid, M. N. A. and Yusof, U. K. (2018). Dynamic crowd
evacuation approach for the emergency route planning
problem: Application to case studies. Safety Science,
102:263–274.
Li, M., Xu, C., Xu, Y., Ma, L., and Wei, Y. (2022). Dynamic
sign guidance optimization for crowd evacuation con-
sidering flow equilibrium. Journal of Advanced Trans-
portation, 2022:2555350.
Lin, H.-M., Chen, S.-H., Kao, J., Lee, Y.-M., Lin, C.-
Y., and Hsiao, G. (2017). Applying active dynamic
signage system in complex underground construction.
International Journal of Scientific & Engineering Re-
search, 8.
Lovreglio, R., Fonzone, A., and dell’Olio, L. (2016). A
mixed logit model for predicting exit choice during
building evacuations. Transaportation Research Part
A: Policy and Practice, 92:59–75.
Lujak, M., Billhardt, H., Dunkel, J., Fern
´
andez, A., Her-
moso, R., and Ossowski, S. (2017). A distributed ar-
chitecture for real-time evacuation guidance in large
smart buildings. Computer Science and Information
Systems, 14:257–282.
Nguyen, V.-Q., Vu, H.-T., Nguyen, V.-H., and Kim, K.
(2022). A smart evacuation guidance system for large
buildings. Electronics, 11:2938.
Tsurushima, A. (2021). Simulation analysis of tunnel vision
effect in crowd evacuation. In Rutkowski, L., Scherer,
R., Korytkowski, M., Pedryca, W., Tadeusiewicz,
R., and Zurada, J. M., editors, Artificial Intelligence
and Soft Computing. ICAISC 2021. Lecture Notes in
Computer Science, volume 12854, pages 506–518.
Springer.
Tsurushima, A. (2022a). Efficient crowd evacuation guid-
ance with multiple visual signage using a middle-
range agent model and black-box optimization. In
2022 IEEE International Conference on Systems,
Man, and Cybernetics (SMC), pages 2591–2598.
Tsurushima, A. (2022b). Tunnel vision hypothesis: Cogni-
tive factor affecting crowd evacuation decisions. SN
Computer Science, 3(332).
Vizzari, G., Crociani, L., and Bandini, S. (2020). An agent-
based model for plausible wayfinding in pedestrian
simulation. Engineering Applications of Artificial In-
telligence, 87:103241.
Wilensky, U. (1999). NetLogo. Center for Connected
Learning and Computer-Based Modeling, Northwest-
ern University, Evanston, IL.
Xue, Y., Wu, R., Liu, J., and Xianglong, T. (2021). Crowd
evacuation guidance based on combined action-space
deep reinforcement learning. Algorithms, 14(26).
Zhao, H., Schwabe, A., Schl
¨
afli, F., Thrash, T., Aguilar, L.,
Dubey, R., Karjalainen, J., H
¨
olscher, C., Helbing, D.,
and Schinazi, V. (2022). Fire evacuation supported
by centralized and decentralized visual guidance sys-
tems. Safety Science, 145:105451.
Zu, Y. and Dai, R. (2017). Distributed path planning for
building evacuation guidance. Cyber-Physical Sys-
tems, 3(1-4):1–21.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
188
