
Gaia: A Social Robot to Help Connect Humans and Plants
Christopher Xenophontos, Teressa Clark, Michael Seals, Cole A. Lampman, Iliyas Tursynbek
and Mounia Ziat
a
Bentley University, 175 Forest St, Waltham, MA, 02452, U.S.A.
Keywords:
Social Robots, Human-Plant Interaction, Multimodal Design, Arduino.
Abstract:
Interacting with plants has been shown to increase both physical and mental health outcomes and seemed
obvious for many during such troubling times. Inevitably, plants died as a result of the owner’s lack of
awareness of their needs. Gaia, a social robot-planter, was created to communicate a plant’s needs to its
owner in an easy and enjoyable way. The final prototype, a multimodal interface, was designed to join natural
language messaging with an emotive digital face and “voice.” Creating a social robot that anthropomorphizes
the user’s plant to effectively communicate the plants’ needs, build empathy, and create a stronger emotional
bond between the plant and owner, leading to better outcomes for both.
1 INTRODUCTION
One strategy many individuals use to improve and
personalize their space was to incorporate more
plants. House plants not only elevate a room vi-
sually, they also provide comfort and have poten-
tial health and psychological benefits (Elings, 2006;
Sabra, 2016; Seow et al., 2022). Alongside the rise
in popularity of plant caretaking, there has been a
parallel rise in products designed to help individuals
care for their newly acquired plants (Clark, 2022). In-
creasingly, products are turning towards technology,
often in the form of mobile applications, as a solution
for common problems such as species identification,
watering schedules, and troubleshooting if a plant’s
health begins to decline.
While the uptick in plant caretaking as a hobby
has shown an upturn in houseplant sales, it has not
been a revolution in the way humans interact with
plants. Although plants are living things, they are
treated more like decorations or accessories to a space
rather than living companions. The relationship be-
tween a plant and its caretaker is entirely driven by
the human that puts as much meaning into the plant
as they want. The plant is unable to interact with or
explicitly communicate with the caretaker. Instead,
plants communicate their needs over days as their
leaves and stalks droop yellow. Once a caretaker no-
tices these changes in their plants’ health, they must
a
https://orcid.org/0000-0003-4620-7886
know what intervention to take; many owners have
asked themselves the question, “Are these leaves turn-
ing yellow because of lack of or too much water?”
With these circumstances confusing communica-
tion, plant owners can find themselves stressed about
the health of their plants while the plants find them-
selves under subpar care conditions. Our device Gaia,
shown on Fig. 2a, transforms any houseplant into
an evocative social robot that gives the plant a way
to communicate its needs to the caretaker in an in-
stant (Breazeal, 2003) using sensors and audio inter-
face to check the plant’s condition. Using soil and
sunlight sensors, which measure the exact amount of
moisture in the soil and the intensity of the light the
plant is receiving, respectively, the robot describes the
plant’s needs to the user. Through the use of screens,
emoticons, and sounds, Gaia anthropomorphizes the
plant, making it easier for humans to understand its
needs. Additionally, by giving the plant-robot the
ability to express the same emotions as humans, it
could increase the empathy a caretaker has for their
plant, thereby making a caretaker more responsive
(Urquiza-Haas and Kotrschal, 2015). Ultimately, the
goal of Gaia is to make plant caretaking easier by al-
lowing the caretaker to interact with the plant in novel
ways involving emotion-based prompts.
1.1 Benefits of Plant Caretaking
Human-plant relations precede any written history.
Not only have we relied on plants to survive, but
400
Xenophontos, C., Clark, T., Seals, M., Lampman, C., Tursynbek, I. and Ziat, M.
Gaia: A Social Robot to Help Connect Humans and Plants.
DOI: 10.5220/0012266400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 400-407
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

plants have played an active role in human evolu-
tion, civilization, and urbanization. Humans have af-
fected plant evolution in a similar manner – through
cultivation and agriculture, we have developed a co-
dependence with the plant kingdom (Van der Veen,
2014).
As a result of this close relationship with plants,
humans can receive a multitude of benefits and range
of interactions – from simply being around plants
to actively gardening (Elings, 2006; Sabra, 2016).
In passive interaction environments (e.g., plants in
an office setting), being in the presence of vegeta-
tion has shown to improve cognitive functioning, at-
tention maintenance, creativity, and even happiness
(Chien et al., 2015; Seow et al., 2022). When work-
places have abundant greenery, employees reported
decreases in negative health effects like headaches
and tiredness and allowed workers to recover from
stress more quickly (Elings, 2006). Additionally, suc-
cessfully caring for a houseplant can provide a feeling
of control in a world where daily stress leaves people
feeling increasingly unmoored (Sabra, 2016).
In activities involving greater interaction, like gar-
dening, there are physical benefits, such as lowering
the risk of heart disease, in addition to the robust psy-
chological benefits. Considering mental health, gar-
dening has been seen to increase self-esteem and can
provide a sense of belonging and self-worth. Thera-
peutic horticulture, or the use of gardening and culti-
vating to promote well-being, has been incorporated
into social and clinical work as an alternative therapy.
In therapeutic settings, gardening provides an envi-
ronment where people can be mindful and intentional
and, as a result, can become more aware of their sur-
roundings, recognize stressful triggers, practice self-
regulation, and have a healthy outlet for their frustra-
tion (Chien et al., 2015; Elings, 2006; Sabra, 2016).
1.2 Social Robot and Human-Plant
Interaction
Relying on Social Robot principles of empathy and
interaction, Gaia seeks to build a stronger bond be-
tween a caretaker and their plant, making it easier and
more fun to maintain the health of one’s houseplants.
In this context, our team uses the Socially Evoca-
tive definition for a social robot, described as anthro-
pomorphized robots to encourage humans to interact
with them in a more natural way (Breazeal, 2003). As
a result of its interactive nature, a social robot could
provide several psychological benefits. Robinson et
al. suggest that interactions with social robots could
decrease levels of loneliness, and, more recently, a
meta-analysis of the use of social robots with older
adults found that interactions with social robots could
also lower levels of agitation and anxiety (Robinson
et al., 2013; Pu et al., 2019). By turning the sim-
ple houseplant into a social robot, we seek to capture
the health and wellness benefits from both interacting
with a social robot as well as plant caretaking.
Gaia is not the first attempt to create a device al-
lowing humans to interact with plants on a deeper
level. Such existing devices compose a subset of what
is considered Living Media Interfaces (LMI). Mer-
ritt et al. define LMI as “interfaces that incorporate
living organisms and biological materials into arti-
facts to support interaction between humans and dig-
ital systems,”. Key features of an LMI include a dig-
itally controlled input/output communication (I/O),
the ability to communicate a feeling, and facilitation
of human interaction (Merritt et al., 2020).
Other projects have sought to create interfaces us-
ing ‘I/O Plant’ design patterns for allowing a plant to
directly affect actuators (Kuribayashi et al., 2007b).
With Plantio, researchers used sensors that measured
a plant’s biopotential, allowing the plant to “wake up”
when it was stimulated (using LED lights) (Kurib-
ayashi et al., 2007a). More recently, researchers at the
MIT Media Lab developed a device and framework
for plant-based interfaces (Seow et al., 2022). By at-
taching electrodes, actuated by a sensor, to a mimosa
pudica plant, researchers were able to simulate natu-
ral impulses and provide a plant-based interface that
displayed information on air quality through opening
and closing pudica’s leaves (Seow et al., 2022).
The closest work to our approach was carried out
by Angelini et al. (Angelini et al., 2016), where
three different augmented plants based on user per-
sonas were designed. The difference resides is that
we focused on the social features of the plant and
its ability to trigger emotions using humanoid voice
and emoticon faces while caring for the plant. Addi-
tionally, social aspects in human-plant interaction re-
search (Chang et al., 2022), involving emotions and
voice in one single system was not investigated before
this work.
Our design focus was to create a nurturing sys-
tem - as defined by Aspling et al. as “interfaces that
support the well-being of the plant through greater ex-
pression of need, anthropomorphization, and creating
emotional bonds with humans” (Aspling et al., 2016).
One example of a nurturing system is ‘My Green Pet’
that allows the measurement of the physical contact
children made with the plant (e.g., hitting, stroking,
tickling, etc.) and output audio and visual information
to help children identify the plant as a living organism
(Hwang et al., 2010). However, their design sought
to hide electric components to emphasize the organic
Gaia: A Social Robot to Help Connect Humans and Plants
401
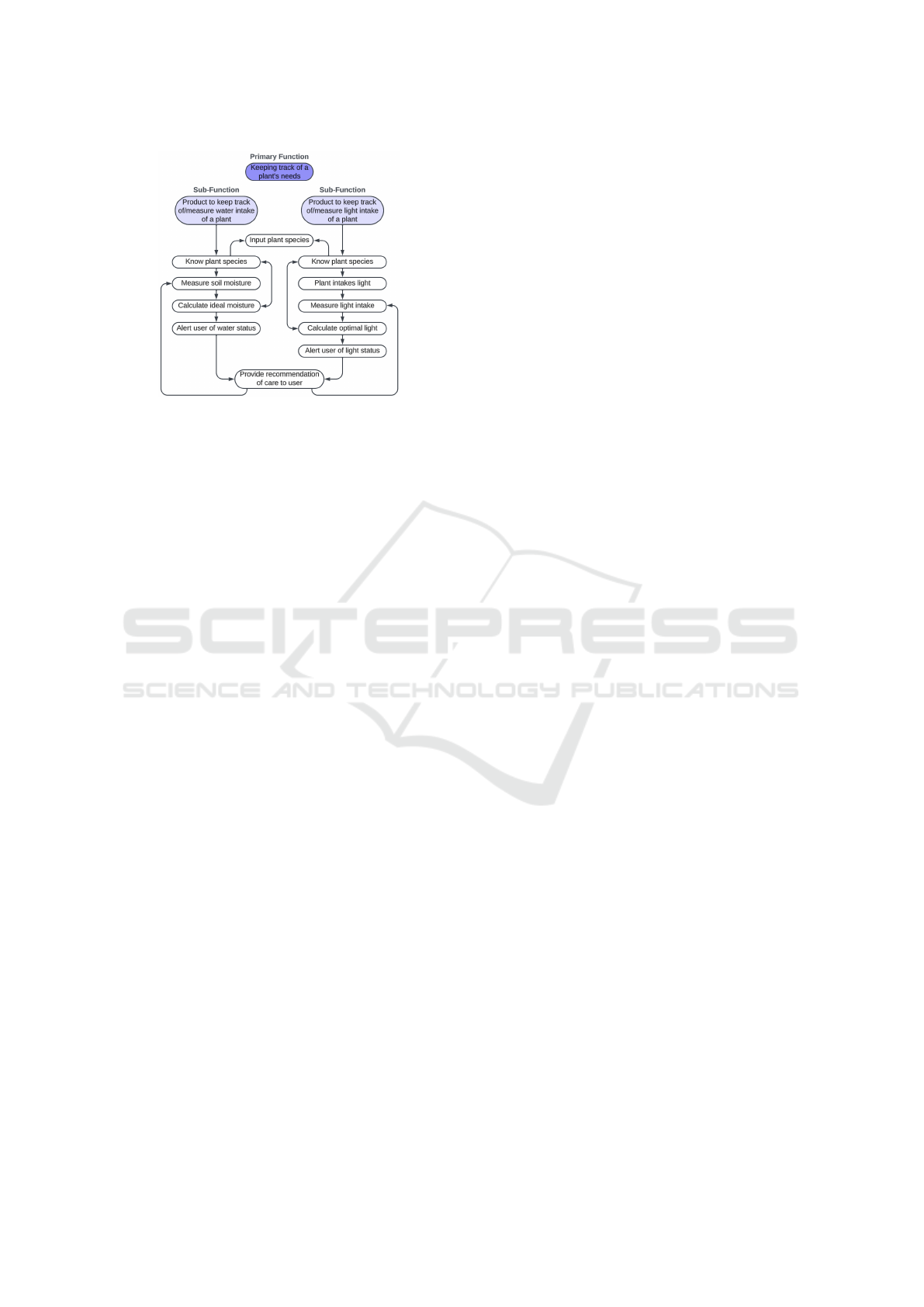
Figure 1: Functional analysis.
nature of the plant (Hwang et al., 2010). With Gaia,
we designed the device as a nurturing system where
the components would be visible while still creating
an emotional bond.
2 IDEATION & EARLY TESTING
2.1 Ideation
Ideation started with a storyboard depicting a user’s
journey: a person initially struggles to care for house-
plants, but finds success with an interactive plant.
This plant not only self-assesses its needs but also
communicates them effectively to the owner. The de-
sign prioritized making the user experience fun and
exciting.
A functional analysis (Fig. 1) identified the de-
vice’s main functions and user interaction consid-
erations. This analysis informed a morphological
chart, listing functions with multiple solution options
(Roozenburg and Eekels, 1995). From this, three
top solutions were selected for further analysis: 1)
Minimalist Wall Art, with the plant on an interactive
wall; 2) Maximum Interaction, where the plant, like
a robotic cleaner, moves on wheels with obstacle sen-
sors for light-seeking; 3) Balanced Approach, keep-
ing the plant in a pot but with enhanced human-plant
interaction features.
Using the morphological chart, we created low-
fidelity sketches for the device’s initial prototype.
This process involved selecting features, determining
module size and placement, and conceptualizing the
device’s overall visual design. We also discussed user
interaction and the physical interface. Initially, the de-
sign consisted of a discrete stand the plant would be
set on with water and light information surrounding
the plant. Ultimately, we decided that separating the
plant from the information felt too artificial. Having
the information attached to the plant’s pot made it feel
like it was being communicated from the plant itself.
Gaia aims to evoke the sense of caring for a robotic
pet, akin to a Tamagotchi, where it communicates its
feelings and care needs back to the user.
2.2 Early Stage Prototype Testing
2.2.1 Research Questions
During the initial design of Gaia, when we had an
understanding of the main functions of the device
as well as the general structure, we had several us-
ability questions that we wanted to validate: 1) Can
users correctly interpret the emoticons we chose to
represent the plant’s various states?, 2) What is the
best way for the plant to communicate its status on
the LCD screen? Should it display natural language
phrases (e.g., “I need water”) or exact sensor readings
(e.g., “Soil Moisture 25%”)?, and 3) Do users under-
stand how to use the buttons on the device?
To answer these questions, we created a rapid pa-
per prototype of the device using cardboard, LED but-
ton modules, and sticky notes (see Fig. 2). A card-
board frame was made to simulate the device, com-
plete with LED buttons. Sticky notes on the cardboard
prototype had drawings of the various emoticons and
status messages on them. During the test, when a par-
ticipant interacted with the mock device, a researcher
would switch the sticky notes to reflect the correct sta-
tus. All testing sessions were conducted in person.
2.2.2 Participants
For the initial test, we recruited four participants aged
23 to 42 years old. Prior to the test, participants
were asked to gauge their experience with caring for
houseplants. Three of the participants owned multiple
houseplants, and the fourth had plants in the past but
was not a current owner. None of the participants de-
scribed themselves as very confident with their abil-
ity to keep their plants alive; all participants had used
Google to help them care for their plants, with two of
the participants reporting they currently use mobile
apps to track a watering schedule for their plants.
2.2.3 Task List
The usability test focused on assessing how well par-
ticipants would use different information to inform
plant care. The tasks consisted of checking the wa-
ter and light levels of the plants, with one set display-
ing information in natural language (NL) phrases and
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
402

(a) (b) (c)
Figure 2: (a) Gaia in operation with a plant inside. (b) The cardboard prototype used in the initial testing: Sticky notes act as
interchangeable screen states, (c) Different faces and screen states tested in the usability session.
the other set displaying information with exact sen-
sor readings. All participants completed both sets of
tasks. The tasks can be seen below:
1. Check the Water Level of the Plant. “If you
wanted to check the current water levels of your
plant, how would you do that?”
(a) Show user natural phrase messages or percent-
age messages: “Based on this information, how
would you care for your plant?”
2. Check the Light Levels of the Plant. “If you
wanted to check the current light levels of your
plant, how would you do that?”
(a) Show user natural phrase messages or percent-
age messages: “Based on this information, how
would you care for your plant?”
3. Verify the Different States of the Plant. “Imag-
ine you walked by your interactive plant and saw
this face on the screen. What would that make you
think of?” (Default Happy State)
(a) “How would you care for your plant after see-
ing that?”
(b) “What about this face?” (Change to Sad State)
(c) “How would you care for your plant after see-
ing that?”
2.2.4 Results
Due to the small number of participants, we need to
be considerate of the level of confidence we give the
test results, however, we were able to pull out high-
level trends based on the interactions we saw.
1. Interpretation of Emoticons. Participants con-
sistently demonstrated an ability to interpret the
emoticons representing the plant’s various states.
The emoticons were often the first element no-
ticed, with participants quickly understanding the
emotions conveyed before reading the LCD mes-
sages. This suggests that the chosen emoticons
effectively communicated the plant’s needs, align-
ing well with the intended design of Gaia.
2. Comparing NL Phrases vs. Exact Sensor
Readings. Participants exhibited high confidence
in responding to NL phrases (e.g., “I need water”).
They understood and acted upon these messages
with clearly and consistently, indicating a pref-
erence for this mode of communication. The re-
sponse to exact sensor readings (e.g., “Soil Mois-
ture 50%”) was mixed, with some participants
gave the plant a little bit of water while other
waited to give the plant more water. Participants
were less confident about the necessary care, indi-
cating some ambiguity in interpreting these read-
ings. This suggests that NL phrases are more ef-
fective in communicating plant needs to users.
Our results led us to use natural language (NL)
phrases for user information display. NL phrases im-
proved participants’ understanding of plant care and
needs. Our set sunlight and soil moisture thresholds,
coupled with corresponding messages, promoted a
natural watering schedule—allowing soil drying be-
fore thorough watering, instead of constant semi-
hydration. Additionally, NL phrases added ”personal-
ity” to plants, making them seem more like compan-
ions than mere health maintenance devices for partic-
ipants.
Gaia: A Social Robot to Help Connect Humans and Plants
403

Figure 3: Electrical connections from Arduino Uno to mod-
ules.
3 GAIA PROTOTYPE
Gaia, controlled by an Arduino Uno and Grove Seeed
modules, interacts with plant owners using sensors.
As the owner approaches within 3m, the PIR Motion
Sensor activates, triggering the Sunlight and Capaci-
tive Moisture Sensors to measure light and soil mois-
ture. The plant’s status is communicated via the RGB
Matrix embedded in the shell, displaying faces indi-
cating water and light levels. Owners can check these
levels using two LED buttons; the blue for water on
the left and the yellow for sunlight on the right of the
RGB Matrix. We chose these colors for their strong
association with plant needs. Pressing the buttons dis-
plays a face, a message on the LCD RGB backlight,
and plays a sound reflecting the plant’s ’mood,’ pro-
duced by an MP3 player module, a Micro SD card,
and a speaker. The outer square shell, 3-D printed
and shown in Fig.3, houses the modules and includes
a space for a flower pot, making plant placement easy.
3.1 Interface Design
3.1.1 3D Printed Plant Shell
The initial 3D print shell, that was circular, did
not enable a secure fit to the Arduino mod-
ules. We switched to a rectangular shape shell
(17.5 (W) x 19.5 (L) x 16 cm (H)) to comfortably fit
all Arduino modules and to protect them from water
and soil (Fig. 4). The outside rectangular shell was
designed to fit any 6-inch pot or less. The pot easily
slides in and out to allow for maintenance. The pot
shell was printed using a Creality Ender 3 3D-printer,
with white PLA filament. The white was chosen to
blend in with other planters that the owner could have
in their home, also allowing for the lights to bounce
off the white for better visibility. The LCD buttons,
RGB Matrix, and LCD RGB screen were placed in
Figure 4: The interior look of the 3D-printed plant pot shell
created using the Creality Ender 3.
the front to represent the face of the plant while the
speaker was located in the back of the device.
3.1.2 Sound Design
The sound design for Gaia has two primary goals, first
to reinforce the visual information being presented
about the status of the plant, and second to foster an
emotional connection between the user and the plant.
Ideally, the sound design would transform Gaia from
a common house or decorative plant into something
that is cared for and holds emotional value that in turn,
drive more intentional care for the plant.
The sound design was modeled after something
that was already familiar to people. Cute and friendly
robots, have existed in the media for decades and pro-
duce strong feelings in the people that interact with
them (Dou et al., 2021). This allowed the design to
tap into an already existing mental model and resulted
in the creation of a childlike and expressive voice that
could convey and amplify both the negative and posi-
tive emotions desired.
Both Positive and negative sounds were imple-
mented. Negative audio feedback would prompt
negative feelings and motivate users to quickly re-
solve any issues in the plant’s environment. Con-
versely, positive audio feedback would provide a pos-
itive emotional reward, reinforcing behavior (Jolij and
Meurs, 2011).
3.1.3 Visual Design
The insights and findings gathered from the usabil-
ity testing sessions were implemented into the de-
sign of visual displays of the RGB Matrix and LCD
screen. Participants in the usability study responded
more to NL messages (e.g., “I feel great, I don’t need
water”) than sensor readouts (i.e., percentages). We
designed the LCD messages to sound more conver-
sational while still remaining within the 32-character
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
404

(a) (b)
Figure 5: Examples of different screen states based on soil moisture and sunlight levels: (a) Sufficient moisture level state
with happy face and message, (b) Insufficient sunlight state with sad face and message.
constraint of the LCD screen. The usability study also
uncovered that the design of the ‘face’ on the RGB
Matrix was a very salient feature and reinforced the
message on the LCD screen.
3.2 Modes
3.2.1 Motion Sensor Mode - Plant Wakes Up
The plant when motion is not detected is in a sleep
state, only showing a message on the LCD that states
“zzzzzzzzz”. As the plant owner walks past the plant
the sensor will trigger and they are able to glance over
and look at the overall health of the plant as seen in
Fig. 5. They can see the RGB Matrix which will dis-
play a range of emotive faces depending on the water
level and light level. If both water and light needs are
met, it will display a happy face. If only one need is
met, it will show a neutral face, communicating that it
needs care soon. If both needs are unmet, it will dis-
play a crying face to show that it needs to be tended
to. This ‘plant wake-up mode’ is intended to help the
user understand the overall health of the plant with a
quick glance as they go about their day, and can also
serve as a reminder that the plant needs tending to. In
this mode, no any sound or voice output is provided
by Gaia.
3.2.2 Moisture Sensor Mode - Blue LED Button
Pressed
When the plant owner is interested in learning about
the water level they can walk over to the plant pot and
press on the blue LED button. The button will read the
moisture level of the soil, the RGB Matrix will then
show the feeling of the plant based on the level. If the
moisture level is ≥ 50%, a happy face with sunglasses
with a happy sound appears, and a message on the
LCD that states “I feel great, I don’t need water.” If
soil moisture is between 15 and 50%, a happy face
accompanied by a contented sigh is displayed with a
message on the LCD that states, “A bit dry, need water
tomorrow,” to communicate that it will be tending to
tomorrow. If soil moisture is < 15%, the matrix will
show a crying face, a sad sound will play, and an LCD
message will display, “I’m totally dry, I need water!”
If the plant owner sees the last message, the intention
is that they will water the plant.
3.2.3 Sunlight Sensor Mode - Yellow LED
Button Pressed
When the plant owner is interested in learning about
the amount of sunlight their plant is receiving, they
can walk over to the plant pot and press the yellow
LED button. The button will read the light levels and
the RGB Matrix will then show the feeling of the plant
based on the level. If the light level is ≥ 50%, it will
show a happy face with sunglasses on, the LCD will
display a message stating “I am getting enough light!”
and the speaker will play a happy sound. If the light
levels are < 50% the RGB Matrix will show an un-
happy face, a message stating “I’m not getting enough
sunlight,” and a sad sound. This 3D prototype was
tested in a second user study described below.
4 USER STUDY
4.1 Participants
Eight participants (Average Age: 29.6 (SD:9); Gen-
der: 3 F, 4 M, 1 prefer not to say) were recruited for
this study. They were all Bentley University students
and were compensated for their time.
Gaia: A Social Robot to Help Connect Humans and Plants
405

4.2 Usability Test
Participants were instructed to interact with Gaia by
responding to the needs of the plant. They were sitting
in a dim room to be able to modulate the light level us-
ing a nearby lamp and have a complete interaction ex-
perience in a single study session and were provided
with a bottle of water and a lamp as described in the
instructions: “This plant has essential needs for its
growth. The plant pot that you see has buttons and
displays. Please take some time to examine this plant
pot and interact with it. Try to satisfy the plant’s needs
by following visual and audio prompts from the pot by
using the water and the lamp provided”.
After the interaction with Gaia, they were asked to
assess the voice using the Self-Assessment Manikin
(SAM) (Bradley and Lang, 1994) with a five-point
scale and evaluate the overall usability using the sys-
tem usability scale (SUS) (Brooke et al., 1996). The
SAM is a non-verbal pictorial scale that directly mea-
sures the valence, arousal, and dominance dimensions
associated with a person’s affective reaction to a wide
variety of stimuli, including visual, auditory, and tac-
tile (Ziat and Raisamo, 2017; Ziat et al., 2020). The
SUS is used to assess several usability attributes such
as effectiveness, efficacy, and satisfaction.
4.3 Results
All participants successfully interacted with the de-
vice buttons, indicating no issues in understanding
their functionality. This confirms the usability of the
button interface in the prototype design. The mean
SUS score of 77.2 with a 95% confidence Interval [68
- 87], significantly (p < .05) above the average (68),
reflects a high level of usability and user satisfaction
with Gaia. It is equivalent to a B on the Sauro/Lewis
SUS grading curve with a corresponding grade range
from C to A+ (Lewis and Sauro, 2018).
The SAM results showed that 75% of participants
felt in control and excited, with 50% reporting hap-
piness (Fig. 6). Participant feedback indicated con-
fusion over delayed responses; three participants ex-
pected immediate changes in the plant’s state. For
instance, two noted: “After watering, the hydration
level showed happy, but it turned dry again after 10-20
sec,” and “The delayed feedback might lead to over-
watering.”
Most participants liked the happy voice but found
the unhappy/whining voice annoying or excessive.
Yet, the voice feature was viewed as a social ice-
breaker, with a participant noting its suitability for
business or social settings with unfamiliar guests.
Also, several participants were intrigued by the de-
vice’s potential to assist those struggling with plant
care, with comments like, “Very interesting device,
though not a plant person,” and “Seemed incredi-
bly helpful for someone who has never really grown
plants.”
5 CONCLUSION AND FUTURE
RESEARCH
At present, Gaia embodies the foundational concept
of transforming a living plant into a simple social
robot, drawing from the broader context of LMIs as
defined by Merritt et al. (Merritt et al., 2020). Our am-
bition, given more resources and time, is to enhance
Gaia in two critical areas: offering more sophisticated
plant care and advancing its social robot features.
To help plant owners care for their plants, Gaia
currently communicates a plant’s needs by taking
readings from either the soil or moisture sensor and
comparing the values to a set of predetermined thresh-
olds. This method of communication, while effective,
doesn’t account for the diverse requirements of dif-
ferent plant species. Each species has its own optimal
care conditions, some might want dry soil for long
periods of time or to be always kept above 50% soil
moisture respectively. In future versions, we aim to
incorporate a species selector, inspired by the species-
specific considerations that have been notably absent
in earlier projects (Kuribayashi et al., 2007a; Kurib-
ayashi et al., 2007b; Seow et al., 2022). This function-
ality will enable Gaia to provide tailored care, adjust-
ing sensor thresholds for individual plant species, en-
suring optimal growth conditions. Furthermore, there
are additional sensors that could be added to Gaia that
would increase the level of plant care, such as hu-
midity and temperature sensors. These would work
in conjunction with a species selector to ensure any
plant could be given its optimal environment.
Gaia’s current iteration, with its emoticons and
natural phrases, is just the beginning of what we en-
vision for its social robot capabilities. Moving for-
ward, we plan to integrate more immediate interac-
tion features, addressing the delay issues identified in
our user study; which were related to the source of
unhappiness expressed by some of the participants as
they expected an instantaneous interaction. This de-
velopment will take cues from the augmented plants
of Angelini et al. (Angelini et al., 2016) and the nur-
turing system approach defined by Aspling et al. (As-
pling et al., 2016), further enhancing Gaia’s ability to
forge a strong emotional bond with users by giving it a
stronger personality and using more complex interac-
tions. The introduction of a “Party Mode”, a function
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
406
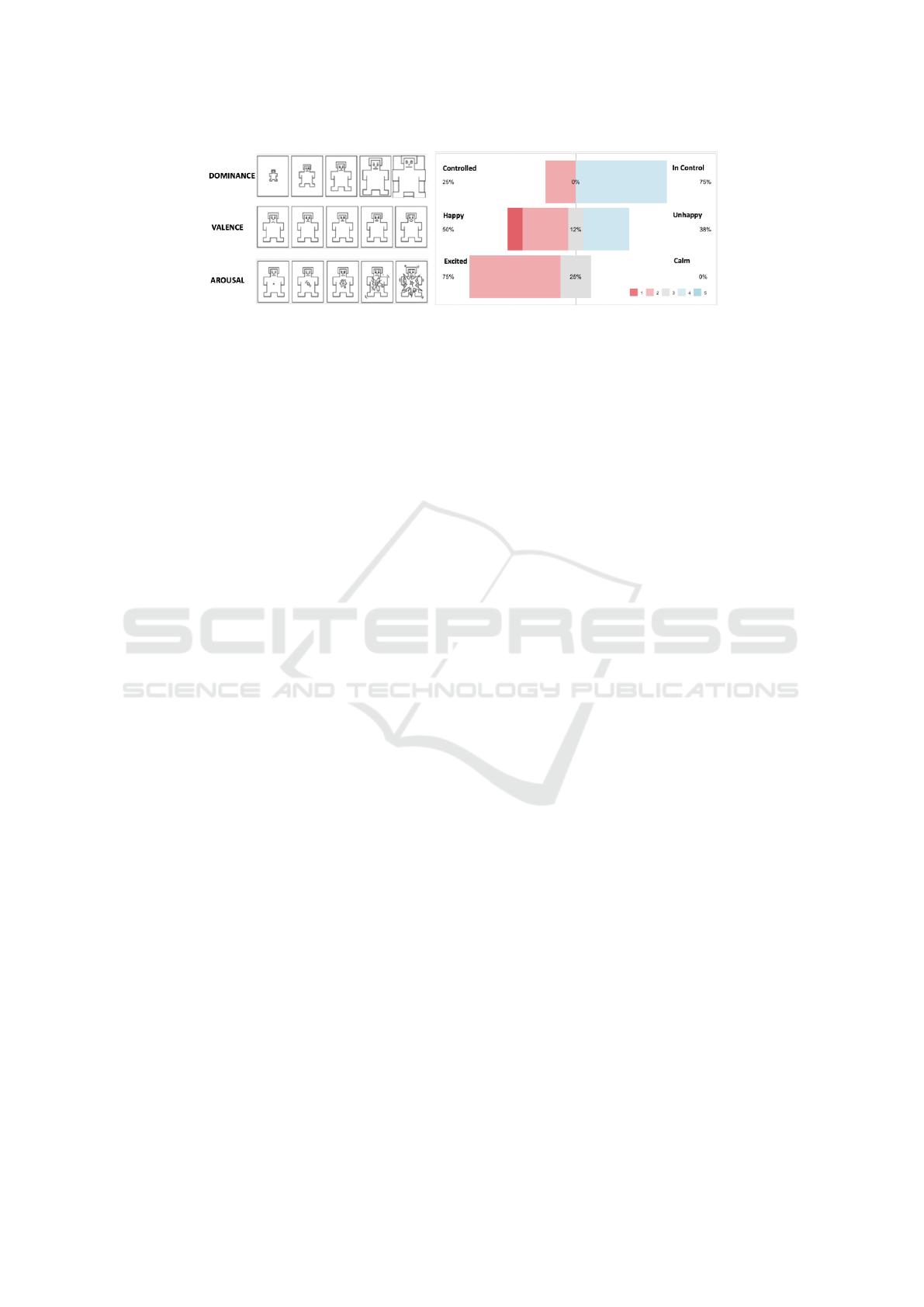
Figure 6: Left: SAM scale, Right: SAM results for the three affective dimensions: Dominance, Valence, and Arousal.
where Gaia would play music and simulate a dance
party, and a richer library of animations and sounds
will enable Gaia to express more lifelike and nuanced
states, surpassing the level of interaction observed in
‘My Green Pet’ (Hwang et al., 2010).
Conducting usability studies with different age
groups, such as children to identify their specific
needs and interaction patterns to improve Gaia’s de-
sign is another aspect that requires improvements. As
we continue our development, we aim to not only im-
prove Gaia’s functionality but also deepen the con-
nection it fosters between humans and plants, thereby
transforming it from a mere decorative object into a
cherished companion.
REFERENCES
Angelini, L., Caon, M., Caparrotta, S., Khaled, O. A., and
Mugellini, E. (2016). Multi-sensory emotiplant: mul-
timodal interaction with augmented plants. In Conf.
on Pervas. and Ubiqu. Computing, pages 1001–1009.
Aspling, F., Wang, J., and Juhlin, O. (2016). Plant-computer
interaction, beauty and dissemination. In 3rd Inter.
Conf. on Animal-Computer Interaction, pages 1–10.
Bradley, M. M. and Lang, P. J. (1994). Measuring emotion:
the self-assessment manikin and the semantic differ-
ential. J. of behav. ther. and exp. psych., 25(1):49–59.
Breazeal, C. (2003). Toward sociable robots. Robotics and
autonomous systems, 42(3-4):167–175.
Brooke, J. et al. (1996). Sus-a quick and dirty usability
scale. Usability evaluation in industry, 189(194):4–7.
Chang, M., Shen, C., Maheshwari, A., Danielescu, A., and
Yao, L. (2022). Patterns and opportunities for the de-
sign of human-plant interact. In DIS, pages 925–948.
Chien, J. T., Guimbreti
`
ere, F. V., Rahman, T., Gay, G.,
and Matthews, M. (2015). Biogotchi! an exploration
of plant-based information displays. In 33rd annual
ACM CHI: Extended Abstracts, pages 1139–1144.
Clark, C. (2022). Putting down roots: A growing millennial
demographic interested in small plants. In Nursery &
Garden Stores in the US. IBISWorld database.
Dou, X., Wu, C.-F., Lin, K.-C., Gan, S., and Tseng, T.-M.
(2021). Effects of different types of social robot voices
on affective evaluations in different application fields.
International Journal of Social Robotics, 13:615–628.
Elings, M. (2006). People-plant interaction: the physiologi-
cal, psychological and sociological effects of plants on
people. In Farming for health, pages 43–55. Springer.
Hwang, S., Lee, K., and Yeo, W. (2010). My green pet: A
current-based interactive plant for children. In Inter.
Conf. on Inter. Des. and Children, pages 210–213.
Jolij, J. and Meurs, M. (2011). Music alters visual percep-
tion. PLOS ONE, 6(4):1.
Kuribayashi, S., Sakamoto, Y., Morihara, M., and Tanaka,
H. (2007a). Plantio: an interactive pot to augment
plants’ expressions. In Internat. conf. on advances in
computer entertainment technology, pages 139–142.
Kuribayashi, S., Sakamoto, Y., and Tanaka, H. (2007b). I/o
plant: a tool kit for designing augmented human-plant
interactions. In CHI’07 EA, pages 2537–2542.
Lewis, J. R. and Sauro, J. (2018). Item benchmarks for the
system usability scale. J. of Usability Studies, 13(3).
Merritt, T., Hamidi, F., Alistar, M., and DeMenezes, M.
(2020). Living media interfaces: a multi-perspective
analysis of biological materials for interaction. Digital
Creativity, 31(1):1–21.
Pu, L., Moyle, W., Jones, C., and Todorovic, M. (2019). The
effectiveness of social robots for older adults: a sys-
tematic review and meta-analysis of randomized con-
trolled studies. The Gerontologist, 59(1):e37–e51.
Robinson, H., MacDonald, B., Kerse, N., and Broadbent,
E. (2013). The psychosocial effects of a companion
robot: a randomized controlled trial. J. of the Ameri-
can Medical Directors Association, 14(9):661–667.
Roozenburg, N. F. and Eekels, J. (1995). Product design:
fundamentals and methods. Wiley.
Sabra, C. (2016). Connecting to self and nature. Journal of
Therapeutic Horticulture, 26(1):31–38.
Seow, O., Honnet, C., Perrault, S., and Ishii, H. (2022). Pu-
dica: A framework for designing augmented human-
flora interaction. In Aug. Humans 2022, pages 40–45.
Urquiza-Haas, E. G. and Kotrschal, K. (2015). The mind
behind anthropomorphic thinking: attribution of men-
tal states to other species. Animal Beh., 109:167–176.
Van der Veen, M. (2014). The materiality of plants:
plant–people entanglements. World archaeology,
46(5):799–812.
Ziat, M., Chin, K., and Raisamo, R. (2020). Effects of
visual locomotion and tactile stimuli duration on the
emotional dimensions of the cutaneous rabbit illusion.
In ACM ICMI 2020, pages 117–124.
Ziat, M. and Raisamo, R. (2017). The cutaneous-rabbit il-
lusion: What if it is not a rabbit? In WorldHaptics,
pages 540–545.
Gaia: A Social Robot to Help Connect Humans and Plants
407
