
Multi-Criteria Service System Designing Using Tabu Search Method
Marek Kvet and Jaroslav Janáček
University of Žilina, Faculty of Management Science and Informatics, Univerzitná 8215/1, 010 26 Žilina, Slovakia
Keywords: Multi-Criteria Location Problems, Pareto Front, Tabu Search Heuristics, Algorithm Efficiency Improvement.
Abstract: Designing a good public service system that provides a geographical region with service through a specified
number of service centers is a very difficult task, particularly when multiple quality evaluation criteria are
applied. A Pareto front of public service system designs is a very useful instrument for any designer who must
consider multiple requests from public representatives. Due to the computational difficulty of determining the
Pareto front, a number of heuristic approaches have been developed. One of these techniques, gradual
refinement, proved to be quite effective, but its performance could be enhanced by eliminating the repetition
of some rudimentary swap routines. This contribution focuses on the application of tabu search features to
enhance and increase the efficacy of the gradual refinement process by suspending the routines' few useful
applications. The resulting metaheuristic is validated through numerical experimentation using benchmarks,
and the approximations of the Pareto front are compared to the exact Pareto fronts.
1 INTRODUCTION
Establishing a new service system, improving an
existing one, or solving other similar issue involving a
public service system involves figuring out the best
locations for service centers, stations, or facilities that
are stocked with the tools, personnel, or other
resources required to meet customers’ demands. It
goes without saying that the combinatorial nature of
the aforementioned challenges necessitates the use of
various mathematical modeling techniques, software
development expertise, or other advanced abilities. As
a result, while making strategic decisions,
professionals in operations research cannot be
disregarded. Because of enormous and quick
advancements being made in practically all relevant
domains, we are able to quickly and effectively
produce good results for significant problem instances
(Ahmadi-Javid et al, 2017, Current, Daskin and
Schilling, 2002, Ingolfsson, Budge, Erkut, 2008).
Speaking of the designing of service systems, it
must be recognized that we do not study private
service systems in this study because they are
primarily focused on maximizing profit regardless of
the number of users covered by the system or the
degree of equity in service accessibility. As a result,
we exclusively focus on public service systems, the
existence of which is typically guaranteed by
legislation. Public service systems are designed to
ensure that all local citizens will receive services,
regardless of financial gain or loss (Jánošíková, 2007,
Jánošíková, Žarnay, 2014). According to science, the
discrete network location problem family includes the
public service system design problem, which has been
researched and successfully resolved by numerous
authors (Brotcorne, Laporte, Semet, 2003, Doerner et
al, 2005, Marianov, Serra, 2002). The weighted p-
median problem is the most concrete form of the
problem, and one of the most popular modeling
notions is what comes next.
Common mathematical models may have a
number of serious drawbacks, one of which is the
limitation that only one objective function can be
maximized/minimized. Large service systems are
complicated systems with a variety of competing
demands made by various stakeholder groups
involved in the decision-making process, and not all
of them lend themselves to abstraction. Therefore,
multi-objective service system optimization is the
focus of attention. Only two opposing aims will be
taken into account for the sake of simplicity in this
paper. Another obstacle connected with large
mathematical models consists in the complexity of
most exact methods, which usually disables their
application for practice. On the other hand, experts
have found a solution also for such a situation.
As well as existing conventional exact methods
based usually on the branch and bounds principle,
Kvet, M. and Janá
ˇ
cek, J.
Multi-Criteria Service System Designing Using Tabu Search Method.
DOI: 10.5220/0012262800003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 193-199
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
193

newer heuristic algorithms, metaheuristics, and more
advanced evolutionary approaches to the optimization
issues have been created. Verifying that the best
answer identified is the optimal solution is a particular
weakness of practically all exact approaches. Some
modeling strategies, such as the radial approach
(Avella, Sassano, Vasil'ev, 2007, Kvet, 2014, Kvet,
2018), can greatly speed up the associated solving
process. Nonetheless, the time it takes to verify these
accurate methods is sometimes prohibitive. However,
heuristic approaches allow us to get a decent answer
in much less time. Furthermore, public service system
design can address bi-criteria location challenges,
which present a similar challenge with the same
precise techniques of slow performance. The Pareto
front is a unique collection of solutions that must be
looked for when there are two or more objectives to be
optimized. Since completing the complete
inextensible Pareto front requires a lot of effort
(Grygar, Fabricius, 2019, Janáček, Fabricius, 2021),
academics have focused on developing approximate
methods and efficient heuristics (Arroyo et al, 2010,
Gendreau, Potvin, 2010, Gopal, 2013).
This contribution is focused on application of tabu
search features to enhance the gradual refinement
process developed especially to approximate the
original Pareto front. The main goal is to increase its
efficiency by suspending the little useful applications
of associated routines. Obviously, suggested
algorithm has been experimentally verified and the
obtained results are reported here.
The structure of this paper is organized according
to the following scheme: The main goal of the first
section was to introduce the problem and to place it
into a wider scientific context. The second section
discusses the Pareto front of bi-criteria location
problem solutions. In section 3, we introduce the
neighborhood search with tabu moves. The fourth
section summarizes the numerical experiments. Here,
we provide the readers with several comments on the
computational study. The last section is dedicated to
the conclusions and future research directions.
2 PARETO FRONT OF
BI-CRITERIA LOCATION
PROBLEM SOLUTIONS
A discrete location problem can be concisely
described as the task to select p locations from the set
of m candidate locations so that a given criterion
value is minimal. Thus the set of all feasible problem
solutions Y can be defined as Y={y: y⊂{1, …, m},
y=p}.
As concerns quantified criteria of the individual
elements of Y, they depend on the sort of the real
problem formulated as the location problem. In the
case of private service system design, the objective is
often minimal total cost of service distribution from
service centers to the customers. The total cost is
usually proportional to the sum of weighted distances
from customers to the closest service center.
Considering a public service system design, the
situation is more complex due to more points of view
at the system utility. In principle, the applied criteria
can be divided into two classes called system criteria
and fairness criteria. The system criterion minimizes
disutility perceived by an average system user and the
fairness criterion minimizes disutility perceived by
the worst situated minority of the system users. The
system criterion can be represented by an average
response time of the system subject to the assumption
that a user’s demand is satisfied from the nearest
available service center. The fairness criterion can be
represented by the number of users’ demands, which
are situated outside a radius R from the nearest
located service center.
Taking into account random occurrence of the
users’ demands and limited capacity of the service
centers, the nearest available center need not mean the
nearest center due to possible occupancy of the
nearest center. This situation can be modelled by
series q
1
, q
2
, …, q
r
of probability values, where q
k
expresses the probability that the k-th nearest service
center is the nearest available one. If t
ij
denotes time
necessary for transport of service from a possible
service center location i to a user located at location
j∈{1, …, n} and if b
j
denotes frequency of the
demand occurrence at a user’s location j, then the
system objective function f
1
(y) can be defined by (1).
()
{}
1
11
min :
nr
kj k ij
jk
fqbti
==
=∈
yy
(1)
In formula (1), the min
k
operation performed on a
set of values returns the k-minimum value from the
set.
The fairness criterion can be expressed by (2), see
(Bertsimas, Farias, Trichakis, 2011, Buzna, Koháni,
Janáček, 2013).
()
{}
{}
(
)
2
1
max 0, min :
n
jij
j
fbsign tRi
=
=−∈
yy
(2)
The criteria f
1
and f
2
are in conflict, which means
that a decrease in one of them is paid for by an
increase in the other. It follows that there is no
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
194

optimal solution, but a usable result of the two-
criterion problem can be seen in determining such a
set PF of solutions that satisfy clauses (3) and (4).
() () () ()
11 2 2
For each , there exists :
and
P
F
ff ff≤≤
∈∈xY y
yx yx
(3)
() () () ()
() () () ()
11 2 2
11 2 2
For each pair , , it holds that
either and
or and
PF
ff ff
ff ff
∈
<≥
≥<
yz
yz yz
yz yz
(4)
Such a set PF is called a Pareto front. If two
solutions x and y satisfy (3), it is said that solution y
dominates solution x.
As determination of exact Pareto front demands
extremely big portion of computational time, our
attention is focused on approximation of the Pareto
front by a set of noNDSS non-dominated solutions,
which will be denoted by symbol NDSS. The used
implementation of NDSS will be kept in the form of
ordered sequence of feasible solutions y
1
, …, y
noNDSS
,
for which the following inequalities hold f
2
(y
1
) <
f
2
(y
2
) < ... < f
2
(y
noNDSS
) and f
1
(y
1
) > f
1
(y
2
) > … >
f
1
(y
noNDSS
). Furthermore, the first and last members of
NDSS must correspond to the first and last bordering
members of the Pareto front, i.e. the solutions which
have the minimal and maximal value of f
2
respectively. These properties of NDSS enable fast
decision on arbitrary element y of Y concerning its
suitability for improving the current approximation.
That can be used for construction of procedure
Update(NDSS, y), which returns the value of “true” if
y improves the current NDSS and it returns the value
of “false” otherwise. At the same time, the procedure
updates NDSS inserting the admissible y.
The procedure starts with determination of such
k∈{1, …, noNDSS-1} that f
2
(y
k
) ≤ f
2
(y) and f
2
(y) <
f
2
(y
k+1
). If such k does not exist, y is dominated by
y
noNDSS
and the result of the procedure is “false”. If k
is found, then either f
1
(y) ≥ f
1
(y
k
) or f
1
(y) < f
1
(y
k
). In
the former case, y is dominated by y
k
and the
procedure returns “false”. In the latter case, y is
included into NDSS, which can be accompanied by
exclusion of some original members, when f
1
(y) <
f
1
(y
k+1
) holds. In this case, the procedure returns the
value of “true” and updated NDSS.
Proximity of NDSS to PF can be measured by so-
called NDSS-Area, which is computed according to
(5). The complementary constants f
1
dif
k
and f
2
dif
k
can
be computed by (6) and (7) respectively.
()( )
1
12
1
-
noNDSS
kk
k
NDSS Area f dif f dif
−
=
=
(5)
11 1
()-( )
k noNDSS
k
fdif f f= yy
(6)
1
22 2
()-()
kk
k
fdif f f
+
= yy
(7)
Each update of the NDSS by a new solution y is
followed by a reduction of the NDSS-Area and the
associated value is bounded from below the PF-Area.
3 NEIGHBORHOOD SEARCH
WITH TABU MOVES
The neighbourhood search algorithm has proved to be
a massive source of feasible solutions, which
represent candidates for NDSS improving. In general,
the neighbourhood of a given current solution is
defined by a set of permitted operations, which can be
used to modify the current solution keeping feasibility
of the operation result. Each feasible result of a
permitted operation is considered to be an element of
the neighbourhood.
The neighbourhood search algorithm comes from
an initial solution declared as the starting current
solution and searches element-by-element through
the neighbourhood of the current solution. If the used
searching strategy yields n admissible solution, then
this solution is declared to be the new current solution
and the neighbourhood search is continued with the
new neighbourhood. If the opposite case occurs, the
simple neighbourhood search algorithm terminates
and returns the last current solution as the result.
Various strategies can be applied to the
neighbourhood search. The two most known ones are
the first or best admissible strategies. The first
admissible strategy provides the first solution found
that is better than the current one and the best
admissible strategy provides the best admissible
solution of the current neighbourhood. These
strategies can be generalized using parameters called
MaxNos and Threshold. The parameter Threshold
gives minimal difference between objective function
values of the inspected and current solutions for the
inspected solution to be considered admissible. The
parameter MaxNos gives the number of admissible
solutions, which must be met during the
neighbourhood inspection to be allowed to stop the
inspection prematurely. The best of the found
admissible solutions is used as the new current
solution. If the parameter Threshold equals to zero
and the parameter MaxNos takes the value of one,
then the associated strategy reduces to the first
admissible strategy. If the parameter MaxNos is set to
a bigger value than the number of the neighbourhood
Multi-Criteria Service System Designing Using Tabu Search Method
195

elements, then the strategy behaves as the best
admissible strategy.
In this paper, we focus on the neighbourhood
search algorithm with the generalized strategy and
with the only one permitted operation represented by
so called swap operation. The swap operation
replaces one service center location i of the current
solution y
curr
by a possible service center location j,
which is not included in the current solution. The
resulting solution is denoted as swap(y
curr
, i, j). The
inspected solution admissibility is evaluated by the
NDSS-Area decrease caused by insertion of the
solution into NDSS.
The neighbourhood search algorithm was
embedded into the process of NDSS improvement in
the following way.
The process starts with NDSS consisting of
exactly two solutions representing the border
solutions of the exact Pareto front, i.e. the solutions
with the minimal and maximal values of the function
f
2
. Then, the process continues with selecting an
element of the current NDSS in some order and
applying the neighbourhood search algorithm to the
selected solution. During the run of the algorithm, the
NDSS is updated whenever such solution is inspected,
which is not dominated by any solution of the current
NDSS. This process continues until the given
computational time limit is exceeded.
The process in the above described form cannot
avoid repeating the neighbourhood search algorithm
with the same starting solution. Repeating the
algorithm reduces the efficiency of the process
because it only produces candidates that have already
been inspected once. This drawback evoked an idea
of prevent the algorithm from inspecting the series of
current solutions, which was already inspected. For
the purpose, tabu approach taken from the tabu search
approach was implemented here. Time limited
prohibition (tabu) is imposed on both locations of the
performed swap operation so that each possible center
location i is connected with two time instants In(i) and
Out(i) initialized by the value of –Exp, where Exp is
the time of prohibition expiration.
When swap operation i for j should be performed
at current time t, then the clauses t – Out(i) ≥ Exp and
t – In(j) ≥ Exp are verified. If the clauses are satisfied,
the swap operation is performed and the attributes
Out(i) and In(j) are updated by t. The whole process
of NDSS improvement can be described by following
sequence of steps.
0. Initialize NDSS, set up the parameters
MaxNos, Threshold, Exp and time limit T. Set
In(i) and Out(i) at the value if –
Exp for all
possible locations and set t=0.
1. If CPU < T then continue with the step 2,
otherwise terminate and return the current
NDSS.
2. Set k=1 and continue with the step 3.
3. If k < noNDSS, then select y
k
from the current
NDSS and go to the step 4, otherwise go to
the step 1.
4. {Application of the neighborhood search
algorithm to y
k
} Substitute y
k
for the current
solution y
curr
and continue with the step 5.
5. Define set C of location not contained in y
curr
by C = {1, …, m} – y
curr
, Area0 =
NDSS_Area, Nos = 0, BestDecrement = 0 and
continue with the step 6.
6. While Nos < MaxNos choose step-by-step a
pair (i, j), where i∈y
curr
and j ∈ C and
define y = swap(y
curr
, i, j).
If Updated(NDSS, y), then compute Area1 =
NDSS_Area, Decrement = Area0 – Area1.
If Decrement > Threshold then perform Nos
= Nos+1, Area0 = Area1 and if Decrement >
BestDecrement, then set BestDecrement =
Decrement, i
best
= i and j
best
= j.
After processing of the step 6 has finished,
continue with the step 7.
7. If BestDecrement > 0, then redefine y
curr
=
swap(y
curr
, i
best
, j
best
), In(j
best
) = t, Out(i
best
) = t
, t =t+1 and continue with step 5.
Otherwise, check whether the solution at the
k-th position of the current NDSS has
changed. If it stays the same, set k=k+1.
Continue with the step 3.
4 NUMERICAL EXPERIMENTS
This section is used to report the performed numerical
experiments aimed at verifying the efficiency of
suggested approach.
4.1 Benchmarks and Solving Tools
As far as the technical support like hardware and
software tools is concerned, we used the
programming language Java within the NetBeans
IDE 8.2 environment. The experiments were run on a
common PC equipped with the 11
th
Gen Intel®
Core™ i7 1165G7 2.8 GHz CPU and 40 GB RAM.
As the input dataset for the reported
computational study, we made use of commonly used
benchmarks described in (Grygar, Fabricius, 2019),
Janáček, Fabricius, 2021, Janáček, Kvet, 2020,
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
196
Janáček, Kvet, 2021, Janáček, Kvet, 2022a, Janáček,
Kvet, 2022a, Janáček, Kvet, 2022b, Janáček, Kvet,
2022c, Kvet, Janáček, 2022), the origin of which
comes from the road network of Slovakia, through
which the urgent medical care is provided by the
emergency agencies. The list of higher territorial
units, frequently referred to as self-governing regions,
contains Bratislava (BA), Banská Bystrica (BB),
Košice (KE), Nitra (NR), Prešov (PO), Trenčín (TN),
Trnava (TT) and Žilina (ZA). It must be noted that all
network nodes represent both the set of candidates for
service center locating and the set of inhabitants being
provided with service.
As the objective function f
1
expressed by (1)
follows from the concept of so-called generalized
disutility, the parameter r was set to 3. The
coefficients q
k
were set so that q
1
= 77.063, q
2
=
16.476 and q
3
= 100 - q
1
- q
2
. These values were
obtained from a simulation model the details of which
are discussed in (Jankovič, 2016). Parameter R in the
fair objective function described by the formula (2)
was set to the value of 10 in accordance with previous
experiments.
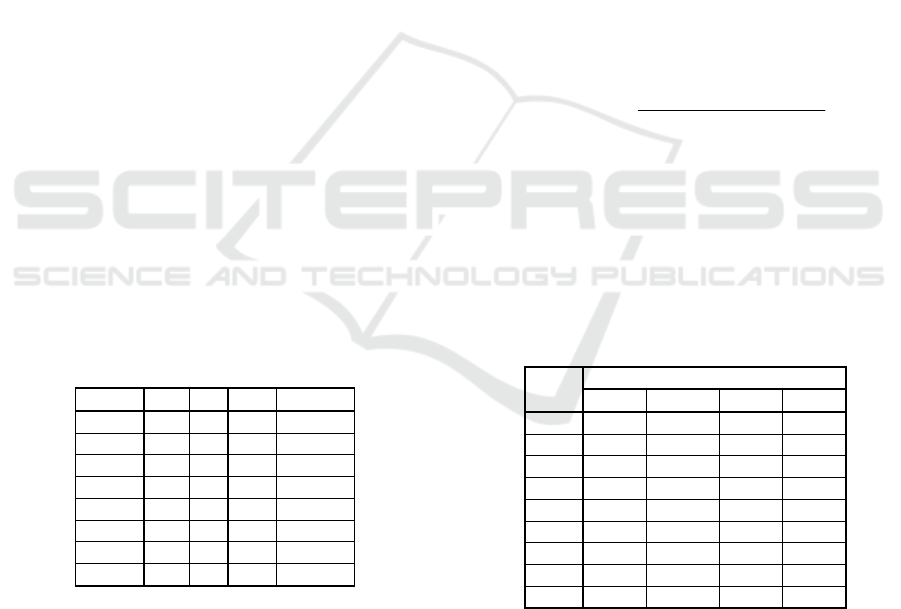
The basic characteristics of benchmarks are
summarized in Table 1. The column denoted by m
reports the cardinality of the set of candidates I, from
which exactly p center locations are to be chosen. The
complete exact inextensible Pareto front is reported
by two values. While the number of its elements is
referred to by NoS, the last column of the table
denoted by PF-Area contains the area of the complete
Pareto front PF computed according to (5).
Table 1: Benchmarks sizes and the exact Pareto fronts
characteristics.
Re
g
ion m
p
N
o
S
P
F
-
A
rea
BA 87 14 34 569039
BB 515 36 229 1002681
KE 460 32 262 1295594
NR 350 27 106 736846
PO 664 32 271 956103
TN 276 21 98 829155
TT 249 18 64 814351
Za 315 29 97 407293
4.2 Results of Experiments
This subsection is devoted to the results of numerical
experiments. The experiments should reveal a
dependence of proximity of NDSS and PF on
expiration “time” Exp. If the value of Exp = 0, no tabu
is imposed on the swap operations. If Exp reaches the
value of p almost each exchange operation is
prohibited. Therefore, we have performed the
experiments in such a way that the parameter Exp was
set according to the expression Exp = coeff*p. The
coeff could vary from 0 (no tabu) to 0.8.
Each run of the algorithm was restricted to five
minutes of computation. This time threshold of five
minutes was chosen on purpose to keep the
comparability of the newly obtained results with the
results of previously developed heuristic approaches.
This is also the reason, why the required computation
time is not reported in the following table.
As far as the quality of the Pareto front
approximation is concerned, it was necessary to find
a suitable metric to compare two sets possibly with
different cardinality. As mentioned in previous
sections, a good metric is the area formed by the
members of PF and NDSS respectively. The area can
be computed easily by the expression (5). To avoid
reporting and comparing high values of areas, a
simpler coefficient called gap can be used. Generally,
gap can be understood as a relative difference
between two values. In our case, it can be expressed
by (8).
--
100*
-
NDSS Area PF Area
gap
PF Area
−
=
(8)
The following Table 2 and Table 3 summarize the
obtained results. Both tables keep the same structure.
Each row corresponds to one setting of coeff, which
is used to determine the value of Exp. Each table
contains the results of experiments performed for half
of benchmarks. In the tables, the values of gap are
reported.
Table 2: Results of numerical experiments – part 1.
coeff
Hi
g
her territorial unit
BA BB KE NR
0 2.075 1.373 3.031 7.485
0.1 2.005 0.535 3.490 7.483
0.2 2.203 2.483 4.622 6.249
0.3 2.257 3.168 4.607 7.543
0.4 1.485 1.794 5.481 6.218
0.5 1.468 2.906 3.535 0.649
0.6 0.334 4.535 4.004 0.749
0.7 1.699 5.807 2.972 0.764
0.8 0.416 11.449 8.090 2.695
Based on the reported results we can see that the
suggested heuristic approach is sensitive to the
parameters settings like many other approximate
approaches (Janáček, Kvet, 2021, Janáček, Kvet,
2022a, Janáček, Kvet, 2022b). On the other hand, the
achieved values of gaps are very promising and they
show, that the tabu search-based method is able to
produce such a Pareto front approximation that shows
a satisfactory level of accuracy.
Multi-Criteria Service System Designing Using Tabu Search Method
197
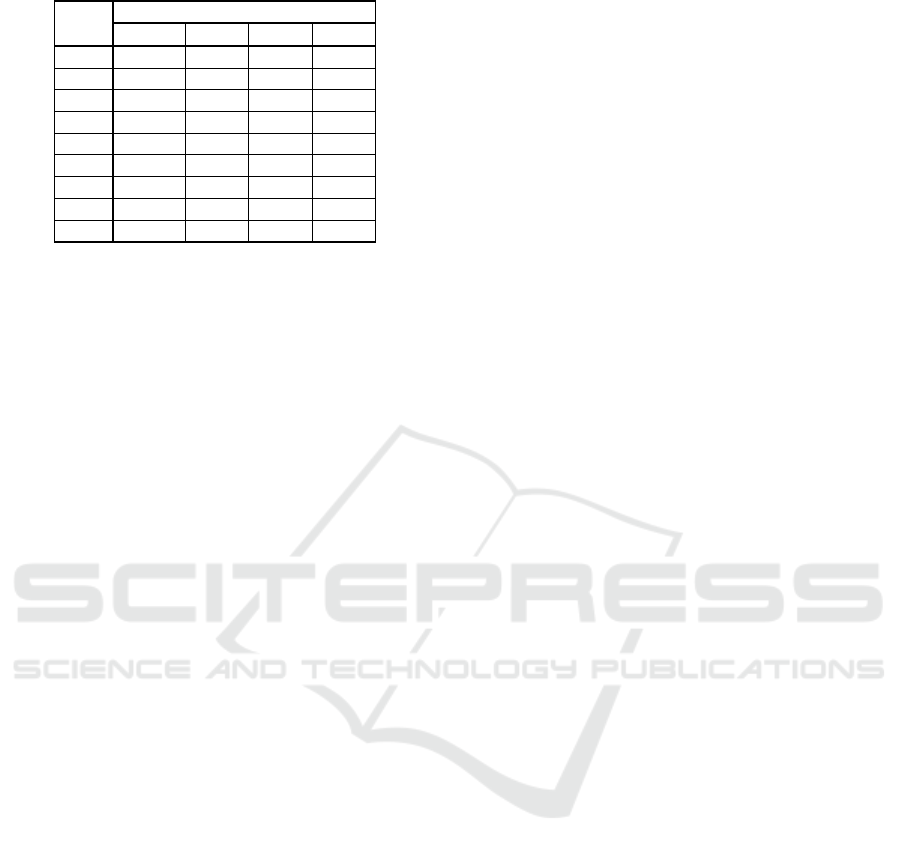
Table 3: Results of numerical experiments – part 2.
coeff
Higher territorial unit
PO TN TT ZA
0 3.203 4.376 0.652 2.068
0.1 3.205 4.376 0.652 2.068
0.2 3.232 4.996 0.652 0.573
0.3 3.373 3.294 0.704 1.488
0.4 3.610 4.795 0.859 0.361
0.5 0.745 3.851 1.158 0.033
0.6 4.793 5.552 0.091 0.045
0.7 14.459 0.724 0.091 0.116
0.8 19.177 1.115 0.091 0.302
5 CONCLUSIONS
This research paper was intended to develop such
heuristic approach to Pareto front approximation that
incorporates the basics of tabu search principle.
Methods for approximating the Pareto front are
required whenever there are multiple contradictory
objectives to be optimized simultaneously. In this
manner, we have attempted to extend the state-of-the-
art approaches for solving bi-criteria location
problems.
The achieved results show that the suggested tabu
search can produce a very precise approximation of
the original Pareto front of service system designs in
acceptably short computational time. Such a great
accuracy makes it suitable for practical applications.
Obviously, we cannot omit the sensitivity of the
method to the parameter value. Therefore, future
research could be aimed at finding possible ways of
finding proper value, for which the best possible
results could be achieved.
ACKNOWLEDGEMENT
This work was financially supported by the following
research grants: VEGA 1/0216/21 “Designing of
emergency systems with conflicting criteria using
tools of artificial intelligence”, VEGA 1/0077/22
“Innovative prediction methods for optimization of
public service systems”, and VEGA 1/0654/22 “Cost-
effective design of combined charging infrastructure
and efficient operation of electric vehicles in public
transport in sustainable cities and regions”. This
paper was also supported by the Slovak Research and
Development Agency under the Contract no. APVV-
19-0441.
REFERENCES
Ahmadi-Javid, A., Seyedi, P. et al. (2017). A survey of
healthcare facility location, Computers & Operations
Research, 79, pp. 223-263.
Arroyo, J. E. C., dos Santos, P. M., Soares, M. S. and
Santos, A. G. (2010). A Multi-Objective Genetic
Algorithm with Path Relinking for the p-Median
Problem. In: Proceedings of the 12th Ibero-American
Conference on Advances in Artificial Intelligence,
2010, pp. 70–79.
Avella, P., Sassano, A., Vasil'ev, I. (2007). Computational
study of large scale p-median problems. Mathematical
Programming 109, pp. 89-114.
Bertsimas, D., Farias, V. F., Trichakis, N. (2011). The Price
of Fairness. In Operations Research, 59, 2011, pp. 17-
31.
Brotcorne, L, Laporte, G, Semet, F. (2003). Ambulance
location and relocation models. European Journal of
Operational Research, 147, pp. 451-463.
Buzna, Ľ., Koháni, M., Janáček, J. (2013). Proportionally
Fairer Public Service Systems Design. In:
Communications - Scientific Letters of the University
of Žilina 15(1), pp. 14-18.
Current, J., Daskin, M. and Schilling, D. (2002). Discrete
network location models, Drezner Z. et al. (ed) Facility
location: Applications and theory, Springer, pp. 81-118.
Doerner, K. F., Gutjahr, W. J., Hartl, R. F., Karall, M. and
Reimann, M. (2005). Heuristic Solution of an Extended
Double-Coverage Ambulance Location Problem for
Austria. Central European Journal of Operations
Research, 13(4), pp. 325-340.
Gendreau, M. and Potvin, J. (2010). Handbook of
Metaheuristics, Springer Science & Business Media.
Gopal, G. (2013). Hybridization in Genetic Algorithms.
International Journal of Advanced Research in
Computer Science and Software Engineering, vol. 3,
pp. 403–409.
Grygar, D., Fabricius, R. (2019). An efficient adjustment of
genetic algorithm for Pareto front determination. In:
TRANSCOM 2019: conference proceedings,
Amsterdam: Elsevier Science, pp. 1335-1342.
Ingolfsson, A., Budge, S., Erkut, E. (2008). Optimal
ambulance location with random delays and travel
times. Health care management science, 11(3), pp. 262-
274.
Janáček, J., Fabricius, R. (2021). Public service system
design with conflicting criteria. In: IEEE Access:
practical innovations, open solutions, ISSN 2169-3536,
Vol. 9, pp. 130665-130679.
Janáček, J. and Kvet, M. (2020). Adaptive Path-Relinking
Method for Public Service System Design. In: 38th
International Conference on Mathematical Methods in
Economics, Brno: Mendel University in Brno, 2020,
pp. 229-235.
Janáček, J., Kvet, M. (2021). Emergency Medical System
under Conflicting Criteria. In: SOR 2021 Proceedings,
pp. 629-635.
Janáček, J., Kvet, M. (2022a). Adaptive swap algorithm for
Pareto front approximation. In: ICCC 2022: 23rd
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
198

International Carpathian Control conference, Sinaia,
Romania, Danvers: IEEE, 2022, pp. 261-265.
Janáček, J., Kvet, M.. (2022b). Repeated Refinement
Approach to Bi-objective p-Location Problems. In:
INES 2022: Proccedings of the IEEE 26th International
Conference on Intelligent Engineering Systems 2022,
pp. 41-45.
Janáček, J., Kvet, M. (2022c). Pareto Front Approximation
using Restricted Neighborhood Search. In: Proceedings
of the 40th International Conference on Mathematical
Methods in Economics, 2022, Jihlava, pp. 141-147.
Jankovič, P. (2016). Calculating Reduction Coefficients for
Optimization of Emergency Service System Using
Microscopic Simulation Model. In: 17th International
Symposium on Computational Intelligence and
Informatics, pp. 163-167.
Jánošíková, Ľ. (2007). Emergency Medical Service
Planning. In: Communications - Scientific Letters of
the University of Žilina 9(2), pp. 64-68.
Jánošíková, Ľ. and Žarnay, M. (2014). Location of
emergency stations as the capacitated p-median
problem. In: Quantitative Methods in Economics
(Multiple Criteria Decision Making XVII). pp. 117-
123.
Kvet, M. (2014). Computational Study of Radial Approach
to Public Service System Design with Generalized
Utility. In: Digital Technologies 2014, Žilina, Slovakia,
pp. 198-208.
Kvet, M. (2018). Advanced radial approach to resource
location problems. In: Developments and advances in
intelligent systems and applications. Cham: Springer
International Publishing, 2018, Studies in
computational intelligence, 718, pp. 29-48.
Kvet, M., Janáček, J. (2022). Directed Search for Pareto
Front Approximation with Path-relinking Method. In:
Proceedings of the 40th International Conference on
Mathematical Methods in Economics, 2022, Jihlava,
pp. 212-217.
Marianov, V. and Serra, D. (2002). Location problems in
the public sector, Facility location - Applications and
theory (Z. Drezner ed.), Berlin, Springer, pp 119-150.
Multi-Criteria Service System Designing Using Tabu Search Method
199
