
Adaptive Action Supervision in Reinforcement Learning from
Real-World Multi-Agent Demonstrations
Keisuke Fujii
1,2,3 a
, Kazushi Tsutsui
1
, Atom Scott
1
, Hiroshi Nakahara
1
, Naoya Takeishi
4,2
and Yoshinobu Kawahara
5,2
1
Graduate School of Informatics, Nagoya University, Nagoya, Aichi, Japan
2
Center for Advanced Intelligence Project, RIKEN, Osaka, Osaka, Japan
3
PRESTO, Japan Science and Technology Agency, Tokyo, Japan
4
The Graduate School of Engineering, The University of Tokyo, Tokyo, Japan
5
Graduate School of Information Science and Technology, Osaka University, Osaka, Japan
Keywords:
Neural Networks, Trajectory, Simulation, Multi-Agent.
Abstract:
Modeling of real-world biological multi-agents is a fundamental problem in various scientific and engineer-
ing fields. Reinforcement learning (RL) is a powerful framework to generate flexible and diverse behaviors
in cyberspace; however, when modeling real-world biological multi-agents, there is a domain gap between
behaviors in the source (i.e., real-world data) and the target (i.e., cyberspace for RL), and the source environ-
ment parameters are usually unknown. In this paper, we propose a method for adaptive action supervision in
RL from real-world demonstrations in multi-agent scenarios. We adopt an approach that combines RL and
supervised learning by selecting actions of demonstrations in RL based on the minimum distance of dynamic
time warping for utilizing the information of the unknown source dynamics. This approach can be easily
applied to many existing neural network architectures and provide us with an RL model balanced between re-
producibility as imitation and generalization ability to obtain rewards in cyberspace. In the experiments, using
chase-and-escape and football tasks with the different dynamics between the unknown source and target envi-
ronments, we show that our approach achieved a balance between the reproducibility and the generalization
ability compared with the baselines. In particular, we used the tracking data of professional football players as
expert demonstrations in football and show successful performances despite the larger gap between behaviors
in the source and target environments than the chase-and-escape task.
1 INTRODUCTION
Modeling real-world biological multi-agents is a fun-
damental problem in various scientific and engineer-
ing fields. For example, animals, vehicles, pedes-
trians, and athletes observe others’ states and exe-
cute their own actions in complex situations. Pi-
oneering works have proposed rule-based modeling
approaches such as in human pedestrians (Helbing
and Molnar, 1995) and animal groups (Couzin et al.,
2002) for each domain using hand-crafted functions
(e.g., social forces). Recent advances in reinforce-
ment learning (RL) with neural network approaches
have enabled flexible and diverse modeling of such
behaviors often in cyberspace (Ross and Bagnell,
2010; Ho and Ermon, 2016).
a
https://orcid.org/0000-0001-5487-4297
However, when modeling real-world biological
multi-agents, domain gaps may occur between behav-
iors in the sources (real-world data) with unknown dy-
namics and targets (cyberspace in RL) as shown in
Fig. 1. The opposite configuration of the source and
target has been actively studied and known as Sim-to-
Real (Rusu et al., 2017), which transfers the knowl-
edge from cyberspace or human demonstrations to
almost known source dynamics (simulation in Sim-
to-Real) such as real-world robotics (Schaal, 1996;
Kolter et al., 2007). In contrast, domain adaptation
in real-world situations where the parameters of the
source environment are often unknown cannot uti-
lize explicit dynamics regarding source environments
(e.g. transition model). In other words, we consider
a Real-to-Sim domain adaptation problem in which
the unknown source and the target are real-world data
Fujii, K., Tsutsui, K., Scott, A., Nakahara, H., Takeishi, N. and Kawahara, Y.
Adaptive Action Supervision in Reinforcement Learning from Real-World Multi-Agent Demonstrations.
DOI: 10.5220/0012261100003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 27-39
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
27
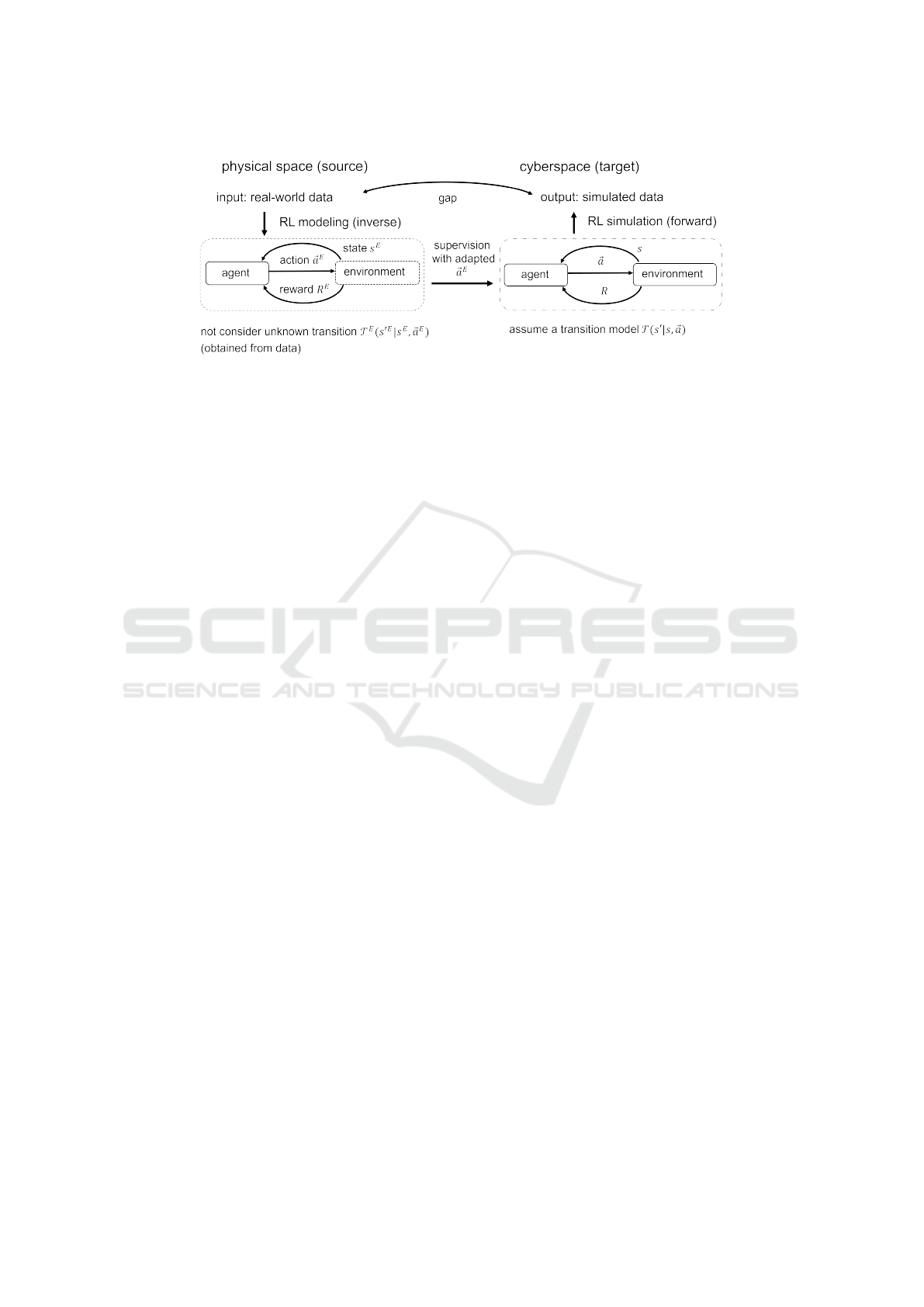
Figure 1: Our problem setting and solution. We consider a Real-to-Sim domain adaptation problem in which the source and
target are real-world data in a physical space and simulated data in cyberspace, respectively. We first perform inverse RL
modeling from real-world data, but we do not consider unknown transition model T
E
because we can obtain the next state
from demonstration data. We then perform forward RL with a temporal transition model T , but there should be a discrepancy
between T
E
and T . Since we cannot access the information of T
E
, our solution comprises the supervised learning using the
observed joint action ⃗a and adapted ⃗a
E
in cyberspace for the learning of the Q function (see also Section 3).
in a physical space and simulated data in cyberspace,
respectively (Fig. 1). Team sports (e.g., football)
and biological multi-agent motions (e.g., chase-and-
escape) are examples that can be addressed with the
above approach. Agents observe others’ states and
execute planned actions (Fujii, 2021), and particu-
larly in team sports, most of the governing equations
are unknown. In such complex real-world behav-
iors, studies have separately investigated RL in cy-
berspace for flexible adaptation to complex environ-
ments (Kurach et al., 2020; Li et al., 2021) and data-
driven modeling for reproducing real-world behaviors
(Zheng et al., 2016; Le et al., 2017; Fujii et al., 2021).
However, given the gap between these forward and
backward approaches (see Fig. 1) in multi-agent RL
(MARL) scenarios, an integrated approach to com-
bine both strengths will be required.
In this paper, we propose a method for adaptive
action supervision in RL from real-world multi-agent
demonstrations. To utilize the information of un-
known source dynamics, we adopt an approach that
combines RL and supervised learning by selecting
the action of demonstrations based on the minimum
distance between trajectories in source and target en-
vironments. Our goal is to balance reproducibility
as imitations and generalization ability to obtain re-
wards (e.g., when different initial values are given in
the same environment). These are mutually indepen-
dent in general, and our approach that combines RL
and supervised learning will help us achieve our goal.
Compared with the case of Sim-to-Real in robotics,
there have been no simulators for real-world agents
with explicit dynamics in biological multi-agent sce-
narios. In our experiments, we use simple chase-and-
escape and football tasks with different dynamics be-
tween unknown source and target environments.
In summary, our main contributions are as fol-
lows. (1) We propose a novel method for adaptive ac-
tion supervision in RL from multi-agent demonstra-
tion, which will bridge the gap between RL in cy-
berspace and real-world data-driven modeling. (2)
We adopt an approach that combines RL and super-
vised learning by selecting actions of demonstrations
in RL based on the minimum distance of dynamic
time warping (DTW) (Vintsyuk, 1968) to utilize the
information of the unknown source dynamics. This
approach can be easily applied to existing neural net-
work architectures and provide an RL model balanced
between reproducibility as imitation and generaliza-
tion ability. (3) In the experiments, using a chase-
and-escape and football tasks with the different dy-
namics between the unknown source and target en-
vironments, our approach struck a balance between
the reproducibility and generalization compared with
the baselines. In particular, we used the tracking data
of professional football players as expert demonstra-
tions in a football RL environment and show success-
ful performances. Our framework can estimate values
for real agent behaviors and decision making if the
model can imitate behaviors of players, which may
be difficult for either data-driven and RL approaches.
In the remainder, we describe the background of
our problem and our method in Sections 2 and 3,
overview related works in Section 4, and present re-
sults and conclusions in Sections 5 and 6.
2 BACKGROUND
Here, we consider a sequential decision-making set-
ting of multiple agents interacting with a fully observ-
able environment. We consider a forward RL model
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
28

in Fig. 1 right, defined as a tuple (K,S,A, T ,R,γ),
where K is the fixed number of agents; S is the set
of states s; A = [A
1
,...,A
K
] represents the set of joint
action ⃗a ∈ A (for a variable number of agents), and
A
k
is the set of local action a
k
that agent k can take;
T (s
′
|s,⃗a) : S × A × S → [0, 1] is the transition model
for all agents; R = [R
1
,...,R
K
] : S × A → R
K
is the
joint reward function; and γ ∈ (0, 1] is the discount
factor. In on-policy RL, the agent learns a policy
π
k
: S
k
× A → [0,1], where S
k
is a set of states for k.
The objective of agent k is to discover the policy
π
k
that maps states to actions, thereby maximizing the
expected total reward over the agent’s lifespan, i.e.,
G
k
=
∑
T
t
γ
t
R
k,t
, where R
k,t
is the reward of agent k at
time t and T is the time horizon. The value Q
π
k
(s
k
,a
k
)
related to a specific state-action pair (s
k
,a
k
) serves as
a expected future reward that can be acquired from
(s
k
,a
k
) when adhering to policy π
k
. The optimal value
function Q
∗
(s,a), offering the maximal values across
all states, is determined by the Bellman equation:
Q
∗
k
(s
k
,a
k
) = E
h
R
k
(s
k
,a
k
) +γ
∑
s
′
k
T
k
(s
′
k
|s
k
,a
k
)max
a
′
k
Q
∗
k
(s
′
k
,a
′
k
)
i
,
(1)
where T
k
is the transition model of agent k. The opti-
mal policy π
k
is then π
k
(s
k
) = arg max
a
k
∈A
Q
∗
k
(s
k
,a
k
).
Since our approach can be easily applied to existing
neural network in model-free RL, we consider both
independent policy for each agent and the joint policy
⃗
π inducing the joint action-value function Q
⃗
π
tot
(s,⃗a) =
E
s
0:∞
,⃗a
0:∞
[
∑
∞
t=0
γ
t
R
t
| s
0
= s,⃗a
0
=⃗a,
⃗
π], where R
t
is the
value of the joint reward at time t.
In a multi-agent system in complex real-world en-
vironments (e.g., team sports), (i) transition functions
are difficult to design explicitly. Instead, (ii) if we can
utilize the demonstrations of expert behaviors (e.g.,
trajectories of professional sports players), we can
formulate and solve it as a machine learning problem
(e.g., learning from demonstration). In other words, if
the problem falls in the case that satisfies the two con-
ditions, (i) and (ii), learning from demonstration is a
better option than a pure RL approach by constructing
the environment without demonstrations. As shown
in Fig. 1 right, we perform forward RL with a tem-
poral transition model T (s
′
|s,⃗a), but there should be
a discrepancy between T and T
E
(s
′E
|s
E
,⃗a
E
) in Fig.1
left. Since we cannot access the information of T
E
,
our solution is the supervised learning using the ob-
served joint action⃗a and adapted⃗a
E
in cyberspace for
the learning of the Q function (see also Section 3).
Next, we introduce DQN framework according to the
previous work (Hester et al., 2018). For simplicity,
we describe the following explanation using a single-
agent RL framework and omit the agent index k.
DQN leverages a deep neural network to approx-
imate the value function Q(s, a) (Mnih et al., 2015).
The network is designed to generate a set action val-
ues Q(s,·;θ) for a given state input s, where θ rep-
resents the network’s parameters. DQN employs a
separate target network, which is duplicated from the
main network after every τ steps to ensure more con-
sistent target Q-values. The agent records all of its
experiences in a replay buffer D
replay
, which is sub-
sequently uniformly sampled for network updates.
The double Q-learning updates the current net-
work by computing the argmax over the subsequent
state values and uses the target network for action
value (Van Hasselt et al., 2016). The loss for Dou-
ble DQN (DDQN) is defined as:
J
DQ
(Q) =
∑
T −1
t
R
t
+ γQ(s
t+1
,a
max
t+1
;θ
′
) − Q(s
t
,a
t
;θ)
2
,
(2)
where θ
′
refers to the parameters of the target net-
work, and a
max
t+1
= argmax
a
t
Q(s
t+1
,a
t
;θ). The up-
ward bias typically associated with regular Q-learning
updates is reduced by separating the value functions
employed for these two variables. For more efficient
learning, e.g., to sample more significant transitions
more frequently from its replay buffer, prioritized ex-
perience replay (Schaul et al., 2016) have been used.
3 ADAPTIVE ACTION
SUPERVISION IN RL
In many real-world settings of RL, we can access
observation data of the multi-agent system, but we
cannot access an accurate model of the system. To
construct an alternative simulator, we want the agent
to learn as much as possible from the demonstration
data. In particular, we aim to decrease the domain
gap between behaviors in the source data and the tar-
get environments. Here, we describe our adaptive
action supervision approach for RL from demonstra-
tions. We adopt the following three steps according
to the deep Q-learning from demonstrations (DQfD)
(Hester et al., 2018). The first is pre-training, which
learns to imitate the demonstrator. The second is sam-
pling actions from the pre-trained RL model in the
target RL environment. The third is training in the
RL environment. During the pre-training and train-
ing phases, the network is updated with mainly two
losses: the 1-step double Q-learning loss in Eq. (2)
and a dynamic time-warping supervised classification
loss. As mentioned above, the Q-learning loss ensures
that the network satisfies the Bellman equation and
can be used as a starting point for TD learning. For
the second loss, we propose a simple supervised loss
Adaptive Action Supervision in Reinforcement Learning from Real-World Multi-Agent Demonstrations
29

for actions and a dynamic time-warping action assign-
ment for efficient pre-training and RL.
The supervised loss is crucial for pre-training be-
cause the demonstration data usually covers a narrow
part of the state space and does not take all possible
actions. Here we consider a single agent case for sim-
plicity (i.e., we removed the notation of agent k, but
we can easily extend it to multi-agent cases). The pre-
vious DQfD (Hester et al., 2018) introduces a large
margin classification loss (Piot et al., 2014):
J
MS
(Q) =
∑
T
t
max
a
t
∈A
[Q(s
t
,a
t
) + l(a
E
t
,a
t
)] − Q(s
t
,a
E
t
),
(3)
where a
E
t
is the action the expert demonstrator
takes in state s
t
and l(a
E
t
,a
t
) is a margin function that
is 0 when a
t
= a
E
t
and positive otherwise. This loss
makes the value of the expert’s action higher than the
other actions’ values, at least by the margin l. This ap-
proach would be effective for learning maximum Q-
function values; however, when limited data are avail-
able, the direct approach to maximize the Q-function
values for the action of the demonstration may be effi-
cient. Therefore, we propose a simple supervised loss
for actions represented by the cross-entropy of soft-
max values of the Q-function such that
J
AS
(Q
t
) = −
T
∑
t
a
E
t
· log (softmax(q
s
t
)), (4)
where a
E
t
∈ {0,1}
|A|
(i.e., one-hot vector of expert ac-
tions), q
s
t
= [Q(s
t
,a
t
= 1),..., Q(s
t
,a = |A|)], and the
log applies element-wise. Ideally, Q-functions in the
source and target domains should be compared, but
when using limited data, it would be better that more
reliable action data is used as supervised data (rather
than using approximated Q-function from data). This
loss aims to achieve both reproducibility and general-
ization by maximizing the Q-function values for the
action of the demonstration. A similar idea has been
used (Hester et al., 2018; Lakshminarayanan et al.,
2016), which used only similar supervised losses in
pre-training or RL, respectively, but we explicitly de-
fine and use this loss for both pre-training and RL to
balance reproducibility and generalization.
Eq. (4) and the large margin classification loss in
DQfD (Piot et al., 2014) in Eq. (3) assume that the
timestamp of expert action a
E
t
should be the same as
that of the RL model a
t
. However, when there is a dis-
crepancy between the source and target environments,
the appropriate timestamp of expert actions can vary
from that of the RL model actions. Thus, we pro-
pose a dynamic time-warping supervised loss for ac-
tions, which does not require prior knowledge, utiliz-
ing DTW framework (Vintsyuk, 1968), a well-known
algorithm in many domains (Sakoe and Chiba, 1978;
Myers et al., 1980; Tappert et al., 1990).
Here, we first consider two state sequences in
RL and demonstration: s = s
1
,. . . , s
t
,. . . , s
n
and s
E
=
s
E
1
,. . . , s
E
j
,. . . , s
E
m
, where n and m are the lengths of the
sequences. We select a
E
t
′
at t
′
(which is not necessarily
equal to t) for demonstration defined as:
t
′
= arg min
j
W (s, s
E
)
t, j
, (5)
where W (s, s
E
) ∈ R
n×m
is a warping path matrix
based on a local distance matrix d(s, s
E
) ∈ R
n×m
(e.g., Euclidean distance) and some constraints such
as monotonicity, continuity, and boundary (Sakoe and
Chiba, 1978). W (s,s
E
)
t, j
∈ R is the (t, j) component
of W (s,s
E
). Then we obtain the supervised action loss
with adaptive action supervision by modifying Eq. (4)
such that
J
AS+DA
(Q
t
) = −
T
∑
t
a
E
t
′
· log (softmax(q
s
t
)). (6)
Additionally, we introduce an L
2
regularization loss
that targets the weights and biases of the network,
aiming to avoid overfitting given the small size of the
demonstration dataset. The total loss used to update
the network is as follows:
J(Q) = J
DQ
(Q) + λ
1
J
AS+DA
(Q) + λ
2
J
L
2
(Q). (7)
The λ parameters control the weight of these losses.
As an ablation study, we examine removing some of
these losses in Section 5. The behavior policy is ε-
greedy based on the Q-values. Note that, similarly
to DQfD (Hester et al., 2018), after the pre-training
phase is finished, the agent starts interacting with the
environment, collecting its own data, and adding it
to its replay buffer D
replay
. The agent overwrites the
buffer when the buffer is full, but does not overwrite
the demonstration data.
4 RELATED WORK
In RL from demonstration (Schaal, 1996), the di-
rect approach recovers experts’ policies from demon-
strations by supervised learning (Pomerleau, 1991;
Ross and Bagnell, 2010; Ross et al., 2011) or genera-
tive adversarial learning (Ho and Ermon, 2016; Song
et al., 2018), which make the learned policies simi-
lar to the expert policies (reviewed e.g., by (Ramírez
et al., 2022) and (Da Silva and Costa, 2019; Zhu
et al., 2020) as transfer learning). However, it is
sometimes challenging to collect high-quality (e.g.,
optimal) demonstrations in many tasks. To obtain
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
30

better policies from demonstrations, several methods
combine imitation learning and RL such as (Silver
et al., 2016; Hu et al., 2018; Lakshminarayanan et al.,
2016).
Some approaches (Vecerik et al., 2017; Hester
et al., 2018) have been proposed to explore the sparse-
reward environment by learning from demonstrations.
Recently, cross domain adaptation problems have
been considered to achieve the desired movements
such as when changing morphologies (Raychaudhuri
et al., 2021; Fickinger et al., 2022). In this case, imi-
tation in terms of reproducibility would be difficult in
principle because the problem (e.g., morphology) is
changed. Our problem setting is different in terms of
achieving both the ability to maximize a reward and
reproducibility (imitation ability) rather than only the
former.
These methods are often designed for single-
agent tasks and attempt to find better policies by
exploring demonstration actions. Many MARL al-
gorithms have been proposed by modifying single-
agent RL algorithms for a multi-agent environment.
One of the early approaches is independent learn-
ing where an agent learns its own policy indepen-
dently of the other agents (Omidshafiei et al., 2017;
Tampuu et al., 2017). Recently, in learning from
demonstrations, for example, researchers have pro-
posed MARL as a rehearsal for decentralized plan-
ning (Kraemer and Banerjee, 2016), MARL aug-
mented by mixing demonstrations from a centralized
policy (Lee and Lee, 2019) with sub-optimal demon-
strations, and centralized learning and decentralized
execution (Peng et al., 2021). Other researchers have
proposed imitation learning from observations under
transition model disparity (Gangwani et al., 2022)
between the dynamics of the expert and the learner
by changing different configuration parameters in cy-
berspace. However, domain adaptation in RL to cy-
berspace from real-world multi-agent demonstrations
has been rarely investigated.
In RL applications, grid-world, robot Soccer,
video games, and robotics have been intensively in-
vestigated. Among these domains, robotics and robot
soccer are specifically related to real-world problems.
In robotics, noise in sensors and actuators, limited
computational resources, and the harmfulness of ran-
dom exploration to people or animals are some of the
many challenges (Hua et al., 2021). There have been
successful applications of transfer learning in robotics
(Schaal, 1996; Kolter et al., 2007; Sakato et al., 2014)
(reviewed by e.g., (Zhu and Zhao, 2021)).These are
mostly transferred from cyberspace or human demon-
strations to real-world robotics (sometimes called
Sim-to-Real (Rusu et al., 2017)), which utilize almost
known dynamics about the (at least) target dynamics.
In contrast, our Real-to-Sim problem cannot utilize
explicit dynamics about both source and target envi-
ronments, and thus such domain adaptation in RL is
challenging.
Robot soccer is similar to our task, in particu-
lar, RoboCup (the Robot World Cup Initiative) in-
volves attempts by robot teams to actually play a soc-
cer game (Kitano et al., 1997). Some researchers have
adopted imitation learning approaches (Hussein et al.,
2018; Nguyen and Prokopenko, 2020), but the source
and target environments are basically the same. In
terms of simulators based on real-world data for data
analysis, to our knowledge, there have been no do-
main adaptation methods in RL from real-world data
to simulation environments.
In the tactical behaviors of team sports, agents se-
lect an action that follows a policy (or strategy) in a
state, receives a reward from the environment and oth-
ers, and updates the state (Fujii, 2021). Due to the dif-
ficulty in modeling the entire framework from data for
various reasons (Van Roy et al., 2021), we can adopt
two approaches: to estimate the related variables and
functions from data (i.e., inverse approach) as a sub-
problem, and to build a model (e.g., RL) to generate
data in cyberspace (i.e., forward approach, e.g., (Ku-
rach et al., 2020; Li et al., 2021)).
For the former, there have been many studies on
inverse approaches. There have been many studies on
estimating reward functions by inverse RL (Luo et al.,
2020; Rahimian and Toka, 2020) and the state-action
value function (Q-function) (Liu and Schulte, 2018;
Liu et al., 2020; Ding et al., 2022; Nakahara et al.,
2023). Researchers have performed trajectory predic-
tion in terms of the policy function estimation, as imi-
tation learning (Le et al., 2017; Teranishi et al., 2020;
Fujii et al., 2020) and behavioral modeling (Zheng
et al., 2016; Zhan et al., 2019; Yeh et al., 2019; Fujii
et al., 2022; Teranishi et al., 2022) to mimic (not op-
timize) the policy using neural network approaches.
This approach did not consider the reward in RL (and
simulation) and usually performed a trajectory predic-
tion.
For the latter approach, researchers have proposed
new MARL algorithms with efficient learning, com-
putation, and communication (Roy et al., 2020; Espe-
holt et al., 2019; Liu et al., 2021; Li et al., 2021). Re-
cently, the ball-passing behaviors in artificial agents
of Google Research Football (GFootball) (Kurach
et al., 2020) and professional football players were
compared (Scott et al., 2022), but a gap still exists
between these forward and backward approaches. In
other research fields, e.g., for animal behavioral anal-
ysis, forward (Banino et al., 2018; Ishiwaka et al.,
Adaptive Action Supervision in Reinforcement Learning from Real-World Multi-Agent Demonstrations
31

2022) and backward approaches (Ashwood et al.,
2022; Fujii et al., 2021) have also been used sepa-
rately. Our approach integrates both approaches to
combine the reproducibility as imitation and general-
ization to obtain rewards.
5 EXPERIMENTS
The purpose of our experiments is to validate the pro-
posed methods for application to real-world multi-
agent modeling, which usually has no explicit equa-
tions in a source environment. Hence, for verification
of our methods, we first examined a simple but differ-
ent simulation environment from the demonstration:
a predator-prey cooperative and competitive interac-
tion, namely a chase-and-escape task. Next, we in-
vestigated a football environment with the demonstra-
tions of real-world football players. We considered a
2vs2 task for a simple extension of the 2vs1 chase-
and-escape task and then a 4vs8 task (4 attackers) for
more realistic situations. We basically considered de-
centralized multi-agent models, which do not com-
municate with each other (i.e., without central con-
trol) for simplicity, but in the football 4vs8 task, we
also examined centralized models.
Here, we commonly compared our full model
DQAAS (deep q-learning with adaptive action su-
pervision) to four baseline methods: a simple DQN
with DDQN and prioritized experience replay intro-
duced in Section 2 (without demonstration), DQfD
(Hester et al., 2018), DQAS (deep q-learning with ac-
tion supervision), and DQfAD (DQfD with adaptive
demonstration using DTW). Using these baselines
with the same network architectures for fair compar-
isons, we investigated the effect of adaptive action su-
pervision. Note that our approach was also used in
the pre-trained phase in all tasks. We hypothesized
that our approach would find a balance between imi-
tation reproducibility and generalization compared to
the baselines. In addition, only for the football 4vs8
task requiring more agent interaction, we examined
CDS (Li et al., 2021), which is a recent centralized
MARL method in GFootball, as a base model. That
is, by replacing it with the above DQN, we also in-
vestigated the effectiveness of our approach as a cen-
tralized MARL method. Our evaluation metrics in the
test phase were twofold: one is the DTW distance be-
tween the RL model and demonstration trajectories
representing imitation reproducibility, and another is
the obtained reward by RL agents. We used well-
known DTW distance here because it would be easy
to verify whether the learning of our model is suc-
cessful or not. During the test phase, ε in ε-greedy
exploration was set to 0 and each agent was made to
take greedy actions. With 5 different random seeds,
we evaluated the mean and standard error of the per-
formances. We used different initial settings for the
test. In the source environment, we did not use the
RL environment and just pre-trained the model from
demonstration data. It should be noted that our pur-
pose is not to develop a state-of-the-art MARL algo-
rithms and the strengths of our approach are to enable
us to apply it to many existing methods and to pro-
vide us with an RL model striking a balance between
reproducibility as imitation and generalization.
5.1 Performance on Chase-and-Escape
First, we verified our method using a chase-and-
escape task, in which the predators and prey inter-
acted in a two-dimensional world with continuous
space and discrete time. The numbers of predators
and prey were 2 and 1, respectively. We first describe
the common setting between the source (demonstra-
tion) and target RL tasks. The environment was
constructed by modifying an environment called the
predator-prey in Multi-Agent Particle Environment
(MAPE) (Lowe et al., 2017; Tsutsui et al., 2022b;
Tsutsui et al., 2022a). Following (Tsutsui et al.,
2022a), the play area size was constrained to the range
of -1 to 1 on the x and y axes, all agent (predator/prey)
disk diameters were set to 0.1, obstacles were elimi-
nated, and predator-to-predator contact was ignored
for simplicity. The predators were rewarded for cap-
turing the prey (+1), namely contacting the disks, and
punished for moving out of the area (−1), and the
prey was punished for being captured by the preda-
tor or for moving out of the area (−1).
Fig. 2a shows an example of the chase-and-escape
task. The time step was 0.1 s and the time limit in
each episode was set to 30 s. The initial position of
each episode was randomly selected from a range of
-0.5 to 0.5 on the x and y axes. If the predator cap-
tured the prey within the time limit, the predator was
successful; otherwise, the prey was successful. If one
side (predators/prey) moved out of the area, the other
side (prey/predators) was deemed successful. There
are 13 actions including acceleration in 12 directions
at every 30 degrees in relative coordinate system and
doing nothing. For the relative mobility of predators
and prey in both environments, to examine the effect
of domain adaptation, we set the same mobility of the
prey in the source and target RL environments, but
for the predators, we set 120% and 110% of the prey
mobility in the source and target RL environments,
respectively. The predators did not share the rewards
for simplicity.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
32
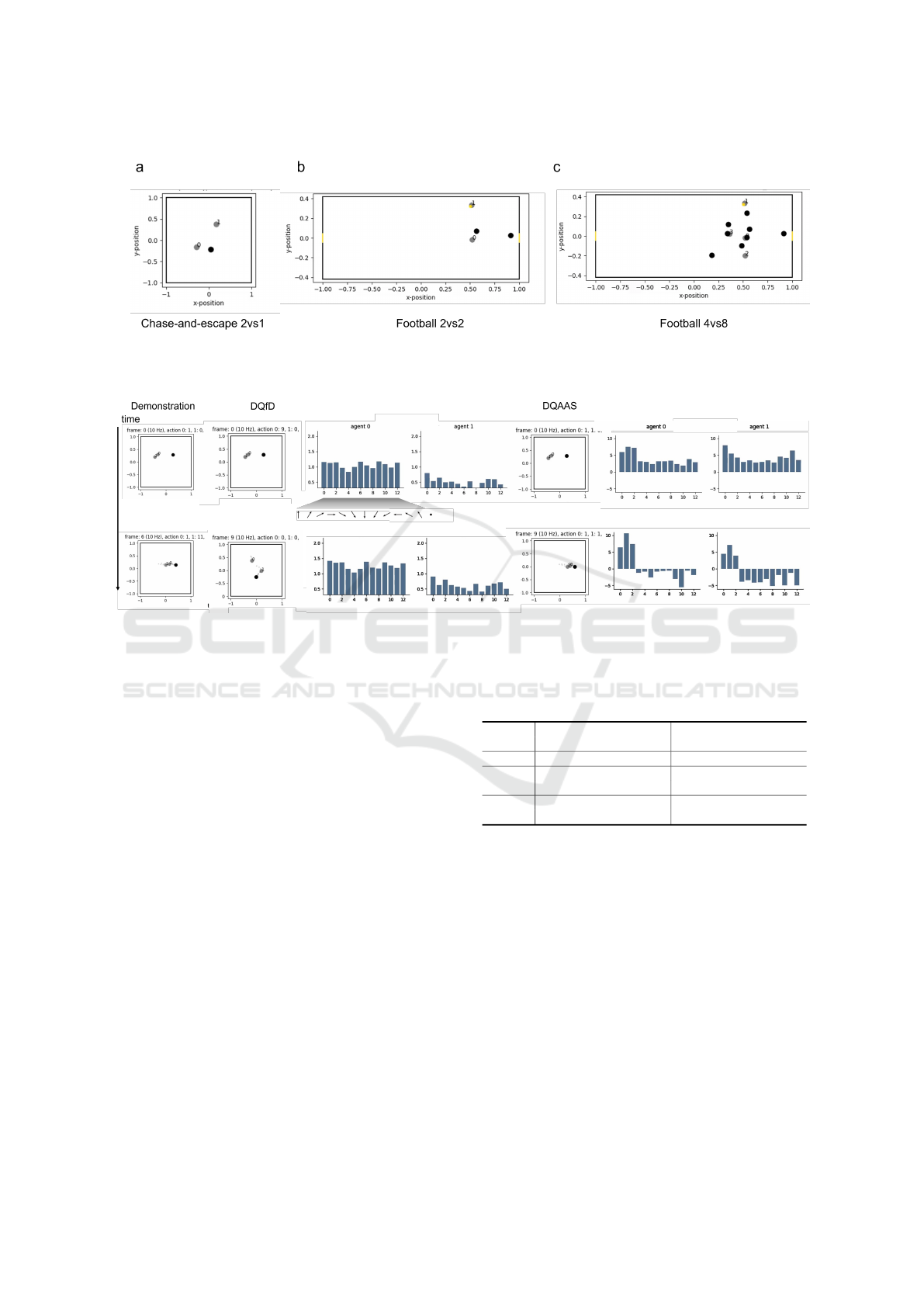
Figure 2: Our RL problem setting. (a) the predators and prey are represented as gray and black disks, respectively. (b) and (c)
are football 2vs2 and 4vs8 tasks, respectively. Yellow circle, yellow line, gray and black circles are ball, goal line, attackers,
and defenders, respectively. The play areas are represented by a black square/rectangle surrounding them.
Figure 3: Example RL results of the baseline (DQfD (Hester et al., 2018), center) and our approach (DQAAS, right), and the
demonstration in the source domain (left) in the 2vs1 chase-and-escape task. Histograms are the Q-function values for each
action. There are 13 actions including acceleration in 12 directions every 30 degrees in the relative coordinate system (action
0 means moving towards the prey) and doing nothing (action 12: round point).
Before using RL algorithm, we first created the
demonstration dataset using the DQN (without data).
After learning 10 million episodes based on the pre-
vious setting (Tsutsui et al., 2022b), we obtained
500 episodes for demonstration with randomized ini-
tial conditions (locations). We split the datasets into
400, 50, and 50 for training, validation, and test-
ing during pre-training, respectively. Then we pre-
trained and trained the models according to Section 3.
To examine the learning performance of the preda-
tor movements with the fixed prey movements, we
performed RL of all predators with the learned (and
fixed) prey. For the target RL, we used 50 train and
10 test episodes from the above 100 episodes for pre-
train validation and testing (i.e., we did not use the
test condition in the target RL during the pre-training
and training phases).
The model performance was evaluated by compu-
tational simulation of the 10 test episodes as the test
phase using the trained models. The termination con-
ditions in each episode were the same as in training.
We calculated and analyzed the proportion of success-
ful predation and DTW distance between the source
and target trajectories in the test phase.
Table 1: Performance on 2vs1 chase-and-escape task.
Reward DTW distance
pre-trained 0.5M steps pre-trained 0.5M steps
DQN 0.04 ± 0.06 0.11 ± 0.03 4.12 ± 0.73 5.70 ± 0.62
DQfD 0.00 ± 0.00 0.04 ± 0.03 5.02 ± 0.34 4.94 ± 0.23
DQfAD 0.00 ± 0.00 0.06 ± 0.03 5.02 ± 0.34 4.80 ± 0.57
DQAS 0.25 ± 0.08 0.26 ± 0.08 5.37 ± 0.40 4.97 ± 1.16
DQAAS 0.25 ± 0.08 0.29 ± 0.09 5.37 ± 0.40 4.73 ± 1.07
We then show the proportion of successful preda-
tion and DTW distance between the source and target
trajectories for each model in Table 1. The results
show that our approaches (DQAAS) achieved better
performances for both indicators than baselines. The
obtained rewards and DTW distance had a trade-off
relationship. In general, how to strike a balance is not
obvious. In this task, with increased training steps, the
DQAAS first learned the ability to maximize a reward
and then learned the reproducibility at the expense of
the reward.
Here we show example results of the baseline
(DQfD (Hester et al., 2018)) and our approach
(DQAAS) in Fig 3. The demonstration (left) shows
that two predators chased the prey almost linearly and
caught the prey in this scenario. In the source do-
Adaptive Action Supervision in Reinforcement Learning from Real-World Multi-Agent Demonstrations
33

Figure 4: Example RL results of the baseline (DQN, center) and our approach (DQAAS, right), and the demonstration (left)
in the 2vs2 football task. In the demonstration and DQAAS, the agents obtained the goal, but the DQN failed. Configurations
are the same as Fig. 3. There are 12 actions including the movement in 8 directions (with constant velocity) every 45 degrees
in the relative coordinate system (actions 0-7 and action 0 means moving toward the center of the goal), doing nothing (action
8: round point), and high pass (action 9: p
h
), short pass (action 10: p
s
), and shot (action 11: s), which are partially based on
GFootball (Kurach et al., 2020).
main (demonstration), the predators were much faster
than the prey (120 %), but in the target domain (RL),
the predators were only slightly faster than the prey
(110 %). Then, the task becomes more challeng-
ing than in the source domain and learning the Q-
function correctly becomes more important to catch
prey. Compared with the baseline, our approach cor-
rectly learned Q-function values in which the distribu-
tion concentrated near action 0 (here action 0 means
moving toward the prey). These results imply the ef-
fectiveness of our approach quantitatively and quali-
tatively.
5.2 Performance on Football Tasks
Next, we used real-world demonstrations of football
players and verified our method. We created an orig-
inal football environment (called NFootball) in our
provided code because in a recent popular environ-
ment (GFootball (Kurach et al., 2020)) the transition
algorithms are difficult to customize and some com-
mands (e.g., pass) did not work well within our in-
tended timings. NFootball has a simple football en-
vironment and all algorithms are written in Python
and then transparent. Similarly to GFootball and
MAPE environments, players interacted in a two-
dimensional world with continuous space and discrete
time. The play pitch size was the same as GFootball
(Kurach et al., 2020): a range of -1 to 1 and -0.42 to
0.42 on the x and y axes, respectively, and the goal on
the y axis was in the range of -0.044 to 0.044.
Figs. 2b and c show examples of two football
tasks: 2vs2 and 4vs8, respectively. The initial posi-
tion of each episode was selected as the last passer’s
possession in the goal scenes based on real-world data
as explained below. The time step was 0.1 s and the
time limit in each episode was set to 8.5 s (based
on the maximum time length of the real-world data
with a margin). All attackers and defenders were
rewarded and punished for goal (+10) and concede
(−10), respectively. Also, all defenders and attackers
were rewarded and punished for ball gain (+1) and
lost (−1), respectively. To complete matches, each
player is punished for moving out of the pitch (−5).
If any reward or punishment is obtained, the episode
is finished. We consider the 2vs2 task for a simple
extension of the 2vs1 chase-and-escape task and the
4vs8 task (4 attackers) for more realistic situations.
Note that currently, the learning of 11vs11 is difficult
and time-consuming, and thus we limited the scenar-
ios. To examine the learning performances of the at-
tacking movements with the fixed defenders’ move-
ments, we first performed the RL of all players with
the DQAAS algorithm, and then we performed RL of
all attackers with the learned (and fixed) defenders.
The mobilities of the attackers and defenders are the
same. There are 12 actions including the movement in
8 directions (with constant velocity) every 45 degrees
in the relative coordinate system, doing nothing, and
high pass, short pass, and shot, which are partially
based on GFootball (Kurach et al., 2020).
Before using RL algorithm, we first created the
demonstration dataset using real-world player loca-
tion data in professional soccer league games. We
used the data of 54 games in the Meiji J1 League
2019 season held in Japan. The dataset includes event
data (i.e., labels of actions, e.g., passing and shooting,
recorded at 30 Hz and the xy coordinates of the ball)
and tracking data (i.e., xy coordinates of all players
recorded at 25 Hz) provided by Data Stadium Inc. We
extracted 198 last-pass-and-goal sequences and 1,385
last-pass sequences (including a ball lost) for training
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
34
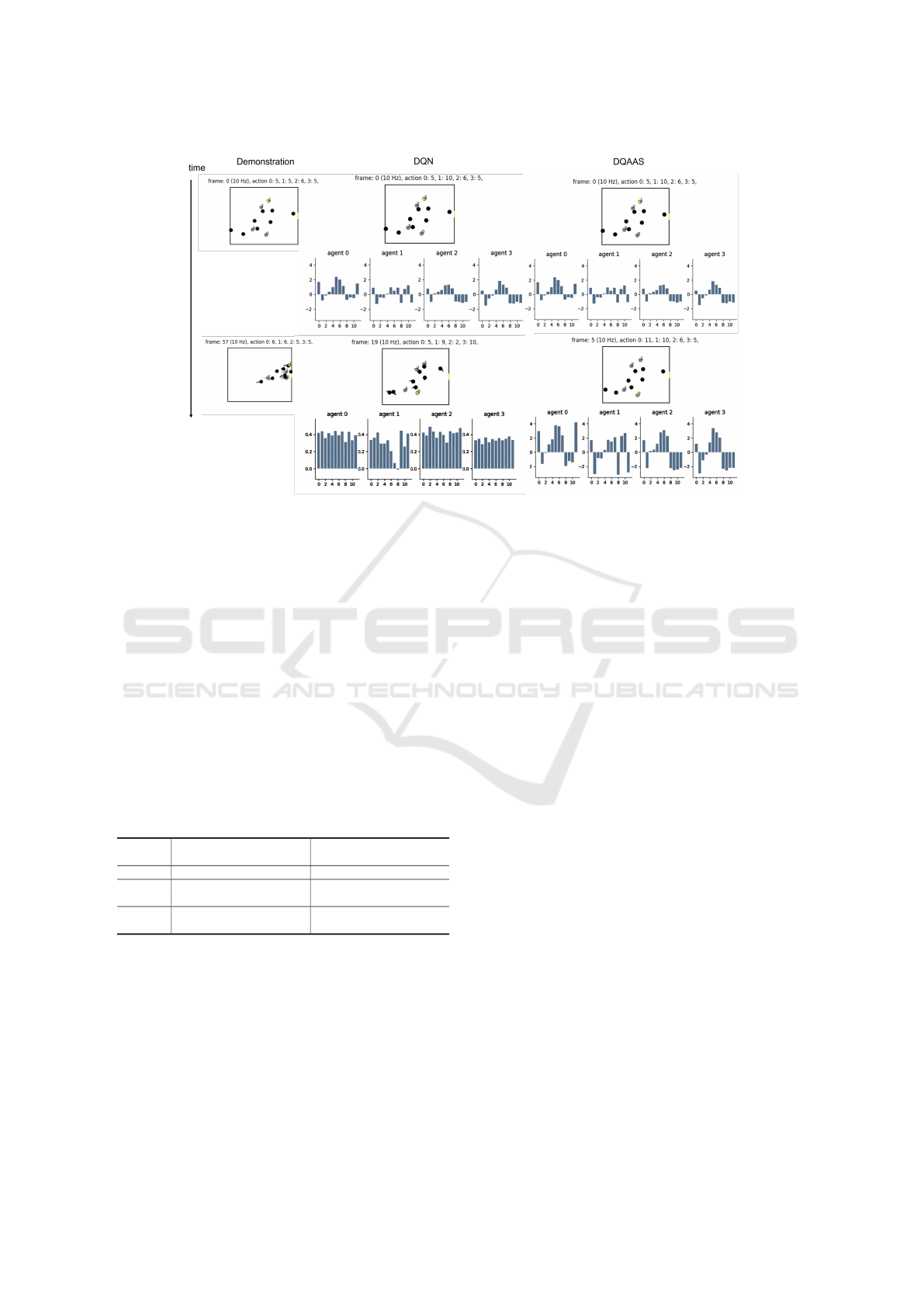
Figure 5: Example RL results of the baseline (DQN, center) and our approach (DQAAS, right), and the demonstration (left)
in the 4vs8 football task. Configurations are similar to Fig. 4 (in this task, 4 attackers are learned). In the demonstration and
DQAAS, the agents obtained the goal, but the DQN failed. The action space is the same as the 2vs2 football task.
and pre-training of the RL model from the dataset. In
pre-training, we split the dataset into 1,121 training,
125 validation, and 139 test sequences (or episodes).
We set shot rewards (+1) for the attacker in addition
to the above rewards and punishments (but we did not
use the out-of-pitch punishment) because the goal re-
ward was sparse and limited. In the target RL, we
used 16 train and 5 test episodes from the above 198
episodes (we did not use the test condition in the tar-
get RL during the pre-training and training phases).
We calculated and analyzed the obtained reward and
DTW distance between the source and target trajecto-
ries in the test phase.
Table 2: Performance on 2vs2 football task.
Reward DTW distance
pre-trained 0.5M steps pre-trained 0.5M steps
DQN 0.00 ± 0.00 1.40 ± 1.16 3.15 ± 0.47 2.69 ± 0.53
DQfD 0.00 ± 0.00 0.00 ± 0.00 4.58 ± 0.00 5.18 ± 0.00
DQfAD 0.00 ± 0.00 0.00 ± 0.00 4.58 ± 0.00 5.29 ± 0.01
DQAS 8.00 ± 0.00 8.00 ± 0.00 2.25 ± 0.00 2.25 ± 0.00
DQAAS 8.00 ± 0.00 8.00 ± 0.00 2.25 ± 0.00 2.25 ± 0.00
Next, we show the quantitative and qualitative per-
formances in the 2vs2 and 4vs8 tasks in this order.
First, we show the average return and the DTW dis-
tance between the source and target trajectories for
each model of the 2vs2 task in Table 2. The re-
sults show that our approaches (DQAS and DQAAS)
achieved better performances for both indicators than
baselines with demonstrations (DQfD and DQfAD).
However, the two performance indicators in the learn-
ing models from demonstrations (except for DQN)
did not change according to the learning steps. It
suggests that the pre-trained models from demon-
strations obtained other local solutions and may be
struggle to obtain better solutions (in particular, in
terms of reproducibility). For example, in Fig 4, we
show the demonstration, example results of the base-
line without demonstration (DQN), and our approach
(DQAAS). The demonstration (left) shows that the
attacker #1 passed the ball to the attacker #0 dur-
ing moving toward the goal. However, in our ap-
proach (right), agents learned movements simply to
pass the ball and shoot without moving toward the
goal. In contrast, the model without demonstration
(center) learned moving toward the goal without pass-
ing and shooting the ball. Ideally, combining both
generalization and reproducibility will be expected
but the domain-specific modeling and reality of the
simulator is left for future work in this task. In
terms of the Q-learning, as shown in Fig. 4, the
agents obtained the goal in the demonstration (left)
and DQAAS (right), but the DQN (center) failed. Al-
though our approach did not reproduce the demon-
stration movements toward the goal, compared with
DQN, our approach correctly learned Q-function val-
ues in which the higher values were observed in ac-
tions 10 and 11 for the passer (agent 1) and shooter
(agent 0), respectively.
Next, we show the results of the 4vs8 football task.
The quantitative results in Tables 3 in DQN-based
RL models show that our approaches (DQAS and
Adaptive Action Supervision in Reinforcement Learning from Real-World Multi-Agent Demonstrations
35
Table 3: Performance on 4vs8 football task.
Reward DTW distance
pre-trained 0.5M steps pre-trained 0.5M steps
DQN 0.00 ± 0.00 0.16 ± 0.13 3.22 ± 0.22 3.24 ± 0.22
CDS 0.12 ± 0.24 0.12 ± 0.24 3.10 ± 0.07 3.25 ± 0.12
DQfD 0.00 ± 0.00 0.00 ± 0.00 3.35 ± 0.00 3.78 ± 0.00
DQfAD 0.00 ± 0.00 0.00 ± 0.00 3.35 ± 0.00 4.28 ± 0.00
CDS+fD 0.00 ± 0.00 0.00 ± 0.00 3.71 ± 0.00 3.76 ± 0.00
CDS+fAD 0.00 ± 0.00 0.00 ± 0.00 3.71 ± 0.00 3.76 ± 0.00
DQAS 0.00 ± 0.00 6.00 ± 0.00 4.54 ± 0.00 3.27 ± 0.00
DQAAS 0.00 ± 0.00 6.00 ± 0.00 4.54 ± 0.00 3.30 ± 0.00
CDS+AS 6.00 ± 0.00 6.00 ± 0.00 3.25 ± 0.00 3.30 ± 0.00
CDS+AAS 6.00 ± 0.00 6.00 ± 0.00 3.25 ± 0.00 3.30 ± 0.00
DQAAS) achieved better performances for both indi-
cators than baselines with demonstrations (DQfD and
DQAAS). These results and discussions were simi-
lar to those in the 2vs2 task shown in Table 2. In
addition, we examined the centralized learning ap-
proach using CDS (Li et al., 2021). These results
shown in Table 3 in CDS-based RL models were very
similar to those in Table 3 in DQN-based RL models.
We confirmed that the cause of the reproducibility is-
sue may not be the centralized/decentralized or clas-
sic/recent deep RL. More task-specific modeling us-
ing domain knowledge (Zare et al., 2021; Nguyen and
Prokopenko, 2020) can be a possible solution, which
is left for future work. In terms of Q-learning (Fig. 5),
compared with DQN (center), our approach (rights)
correctly learned Q-function values for actions 10 and
11 for the passer and shooter, which were similar re-
sults to those in Fig. 4. If the model can imitate be-
haviors of players in the real-world football, we can
estimate values for their behaviors and decision mak-
ing using estimated Q-function values, which may be
difficult for either data-driven and RL approaches.
6 CONCLUSION
We proposed a novel method for domain adaptation
in RL from real-world multi-agent demonstration,
which will bridge the gap between RL in cyberspace
and data-driven modeling. In the experiments, using
chase-and-escape and football tasks with the differ-
ent dynamics between the unknown source and tar-
get environments, we showed that our approach bal-
anced between the reproducibility and generalization
more effectively than the baselines. In particular, we
used the tracking data of professional football play-
ers as expert demonstrations in a football RL envi-
ronment and demonstrated successful performances
in both despite the larger gap between behaviors in the
source and target environments than in the chase-and-
escape task. Possible future research directions are to
create a better multi-agent simulator and RL model
utilizing domain knowledge for reproducing not only
actions but also movements such as used by (Tsutsui
et al., 2023). In another direction, although model-
ing football movements would be currently challeng-
ing, for example, application to multi-animal behav-
iors will provide more scientifically valuable insights.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI (Grant
Numbers 21H04892, 21H05300 and 23H03282) and
JST PRESTO (JPMJPR20CA).
REFERENCES
Ashwood, Z., Jha, A., and Pillow, J. W. (2022). Dynamic in-
verse reinforcement learning for characterizing animal
behavior. Advances in Neural Information Processing
Systems, 35.
Banino, A., Barry, C., Uria, B., Blundell, C., Lillicrap, T.,
Mirowski, P., Pritzel, A., Chadwick, M. J., Degris, T.,
Modayil, J., et al. (2018). Vector-based navigation us-
ing grid-like representations in artificial agents. Na-
ture, 557(7705):429–433.
Couzin, I. D., Krause, J., James, R., Ruxton, G. D., and
Franks, N. R. (2002). Collective memory and spatial
sorting in animal groups. Journal of Theoretical Biol-
ogy, 218(1):1–11.
Da Silva, F. L. and Costa, A. H. R. (2019). A survey on
transfer learning for multiagent reinforcement learn-
ing systems. Journal of Artificial Intelligence Re-
search, 64:645–703.
Ding, N., Takeda, K., and Fujii, K. (2022). Deep reinforce-
ment learning in a racket sport for player evaluation
with technical and tactical contexts. IEEE Access,
10:54764–54772.
Espeholt, L., Marinier, R., Stanczyk, P., Wang, K., and
Michalski, M. (2019). Seed rl: Scalable and efficient
deep-rl with accelerated central inference. In Interna-
tional Conference on Learning Representations.
Fickinger, A., Cohen, S., Russell, S., and Amos, B. (2022).
Cross-domain imitation learning via optimal trans-
port. In International Conference on Learning Rep-
resentations.
Fujii, K. (2021). Data-driven analysis for understand-
ing team sports behaviors. Journal of Robotics and
Mechatronics, 33(3):505–514.
Fujii, K., Takeishi, N., Kawahara, Y., and Takeda, K.
(2020). Policy learning with partial observation and
mechanical constraints for multi-person modeling.
arXiv preprint arXiv:2007.03155.
Fujii, K., Takeishi, N., Tsutsui, K., Fujioka, E., Nishiumi,
N., Tanaka, R., Fukushiro, M., Ide, K., Kohno, H.,
Yoda, K., Takahashi, S., Hiryu, S., and Kawahara, Y.
(2021). Learning interaction rules from multi-animal
trajectories via augmented behavioral models. In Ad-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
36

vances in Neural Information Processing Systems 34,
pages 11108–11122.
Fujii, K., Takeuchi, K., Kuribayashi, A., Takeishi, N.,
Kawahara, Y., and Takeda, K. (2022). Estimat-
ing counterfactual treatment outcomes over time
in complex multi-agent scenarios. arXiv preprint
arXiv:2206.01900.
Gangwani, T., Zhou, Y., and Peng, J. (2022). Imitation
learning from observations under transition model dis-
parity. In International Conference on Learning Rep-
resentations.
Helbing, D. and Molnar, P. (1995). Social force model for
pedestrian dynamics. Physical Review E, 51(5):4282.
Hester, T., Vecerik, M., Pietquin, O., Lanctot, M., Schaul,
T., Piot, B., Horgan, D., Quan, J., Sendonaris, A., Os-
band, I., et al. (2018). Deep q-learning from demon-
strations. In Proceedings of the Thirty-Second AAAI
Conference on Artificial Intelligence and Thirtieth In-
novative Applications of Artificial Intelligence Con-
ference, pages 3223–3230.
Ho, J. and Ermon, S. (2016). Generative adversarial imi-
tation learning. In Proceedings of the 30th Interna-
tional Conference on Neural Information Processing
Systems, pages 4572–4580.
Hu, Y., Li, J., Li, X., Pan, G., and Xu, M. (2018).
Knowledge-guided agent-tactic-aware learning for
starcraft micromanagement. In Proceedings of the
27th International Joint Conference on Artificial In-
telligence, pages 1471–1477.
Hua, J., Zeng, L., Li, G., and Ju, Z. (2021). Learning for
a robot: Deep reinforcement learning, imitation learn-
ing, transfer learning. Sensors, 21(4):1278.
Hussein, A., Elyan, E., and Jayne, C. (2018). Deep imita-
tion learning with memory for robocup soccer simula-
tion. In International Conference on Engineering Ap-
plications of Neural Networks, pages 31–43. Springer.
Ishiwaka, Y., Zeng, X. S., Ogawa, S., Westwater, D. M.,
Tone, T., and Nakada, M. (2022). Deepfoids: Adap-
tive bio-inspired fish simulation with deep reinforce-
ment learning. Advances in Neural Information Pro-
cessing Systems, 35.
Kitano, H., Asada, M., Kuniyoshi, Y., Noda, I., and Osawa,
E. (1997). Robocup: The robot world cup initiative.
In Proceedings of the First International Conference
on Autonomous Agents, pages 340–347.
Kolter, J., Abbeel, P., and Ng, A. (2007). Hierarchical ap-
prenticeship learning with application to quadruped
locomotion. Advances in Neural Information Process-
ing Systems, 20.
Kraemer, L. and Banerjee, B. (2016). Multi-agent reinforce-
ment learning as a rehearsal for decentralized plan-
ning. Neurocomputing, 190:82–94.
Kurach, K., Raichuk, A., Sta
´
nczyk, P., Zaj ˛ac, M., Bachem,
O., Espeholt, L., Riquelme, C., Vincent, D., Michal-
ski, M., Bousquet, O., et al. (2020). Google re-
search football: A novel reinforcement learning envi-
ronment. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 34, pages 4501–4510.
Lakshminarayanan, A. S., Ozair, S., and Bengio, Y. (2016).
Reinforcement learning with few expert demonstra-
tions. In NIPS Workshop on Deep Learning for Action
and Interaction.
Le, H. M., Yue, Y., Carr, P., and Lucey, P. (2017). Coor-
dinated multi-agent imitation learning. In Proceed-
ings of the 34th International Conference on Machine
Learning-Volume 70, pages 1995–2003. JMLR. org.
Lee, H.-R. and Lee, T. (2019). Improved cooperative multi-
agent reinforcement learning algorithm augmented by
mixing demonstrations from centralized policy. In
Proceedings of the 18th International Conference on
Autonomous Agents and MultiAgent Systems, pages
1089–1098.
Li, C., Wang, T., Wu, C., Zhao, Q., Yang, J., and Zhang,
C. (2021). Celebrating diversity in shared multi-agent
reinforcement learning. Advances in Neural Informa-
tion Processing Systems, 34:3991–4002.
Liu, G., Luo, Y., Schulte, O., and Kharrat, T. (2020). Deep
soccer analytics: learning an action-value function for
evaluating soccer players. Data Mining and Knowl-
edge Discovery, 34(5):1531–1559.
Liu, G. and Schulte, O. (2018). Deep reinforcement learn-
ing in ice hockey for context-aware player evaluation.
arXiv preprint arXiv:1805.11088.
Liu, I.-J., Ren, Z., Yeh, R. A., and Schwing, A. G. (2021).
Semantic tracklets: An object-centric representation
for visual multi-agent reinforcement learning. In
2021 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 5603–5610.
IEEE.
Lowe, R., Wu, Y. I., Tamar, A., Harb, J., Pieter Abbeel,
O., and Mordatch, I. (2017). Multi-agent actor-critic
for mixed cooperative-competitive environments. Ad-
vances in Neural Information Processing Systems,
30:6382–6393.
Luo, Y., Schulte, O., and Poupart, P. (2020). Inverse re-
inforcement learning for team sports: Valuing actions
and players. In Bessiere, C., editor, Proceedings of the
Twenty-Ninth International Joint Conference on Arti-
ficial Intelligence, IJCAI-20, pages 3356–3363. Inter-
national Joint Conferences on Artificial Intelligence
Organization.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Veness,
J., Bellemare, M. G., Graves, A., Riedmiller, M., Fid-
jeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning.
Nature, 518(7540):529–533.
Myers, C., Rabiner, L., and Rosenberg, A. (1980). Perfor-
mance tradeoffs in dynamic time warping algorithms
for isolated word recognition. IEEE Transactions on
Acoustics, Speech, and Signal Processing, 28(6):623–
635.
Nakahara, H., Tsutsui, K., Takeda, K., and Fujii, K. (2023).
Action valuation of on-and off-ball soccer players
based on multi-agent deep reinforcement learning.
IEEE Access, 11:131237–131244.
Nguyen, Q. D. and Prokopenko, M. (2020). Structure-
preserving imitation learning with delayed reward: An
evaluation within the robocup soccer 2d simulation
environment. Frontiers in Robotics and AI, 7:123.
Adaptive Action Supervision in Reinforcement Learning from Real-World Multi-Agent Demonstrations
37

Omidshafiei, S., Pazis, J., Amato, C., How, J. P., and
Vian, J. (2017). Deep decentralized multi-task multi-
agent reinforcement learning under partial observabil-
ity. In International Conference on Machine Learn-
ing, pages 2681–2690. PMLR.
Peng, P., Xing, J., and Cao, L. (2021). Hybrid learning
for multi-agent cooperation with sub-optimal demon-
strations. In Proceedings of the Twenty-Ninth Interna-
tional Conference on International Joint Conferences
on Artificial Intelligence, pages 3037–3043.
Piot, B., Geist, M., and Pietquin, O. (2014). Boosted bell-
man residual minimization handling expert demon-
strations. In Joint European Conference on machine
learning and knowledge discovery in databases, pages
549–564. Springer.
Pomerleau, D. A. (1991). Efficient training of artificial neu-
ral networks for autonomous navigation. Neural Com-
putation, 3(1):88–97.
Rahimian, P. and Toka, L. (2020). Inferring the strategy of
offensive and defensive play in soccer with inverse re-
inforcement learning. In Machine Learning and Data
Mining for Sports Analytics (MLSA 2018) in ECML-
PKDD Workshop.
Ramírez, J., Yu, W., and Perrusquía, A. (2022). Model-free
reinforcement learning from expert demonstrations: a
survey. Artificial Intelligence Review, 55(4):3213–
3241.
Raychaudhuri, D. S., Paul, S., Vanbaar, J., and Roy-
Chowdhury, A. K. (2021). Cross-domain imitation
from observations. In International Conference on
Machine Learning, pages 8902–8912. PMLR.
Ross, S. and Bagnell, D. (2010). Efficient reductions for
imitation learning. In Proceedings of the thirteenth
international conference on artificial intelligence and
statistics, pages 661–668. JMLR Workshop and Con-
ference Proceedings.
Ross, S., Gordon, G., and Bagnell, D. (2011). A reduc-
tion of imitation learning and structured prediction to
no-regret online learning. In Proceedings of the four-
teenth International Conference on Artificial Intelli-
gence and Statistics, pages 627–635.
Roy, J., Barde, P., Harvey, F., Nowrouzezahrai, D., and
Pal, C. (2020). Promoting coordination through pol-
icy regularization in multi-agent deep reinforcement
learning. Advances in Neural Information Processing
Systems, 33:15774–15785.
Rusu, A. A., Ve
ˇ
cerík, M., Rothörl, T., Heess, N., Pascanu,
R., and Hadsell, R. (2017). Sim-to-real robot learning
from pixels with progressive nets. In Conference on
Robot Learning, pages 262–270. PMLR.
Sakato, T., Ozeki, M., and Oka, N. (2014). Learning
through imitation and reinforcement learning: Toward
the acquisition of painting motions. In 2014 IIAI 3rd
International Conference on Advanced Applied Infor-
matics, pages 873–880. IEEE.
Sakoe, H. and Chiba, S. (1978). Dynamic programming
algorithm optimization for spoken word recognition.
IEEE transactions on acoustics, speech, and signal
processing, 26(1):43–49.
Schaal, S. (1996). Learning from demonstration. Advances
in Neural Information Processing Systems, 9:1040–
1046.
Schaul, T., Quan, J., Antonoglou, I., and Silver, D. (2016).
Prioritized experience replay. In International Con-
ference on Learning Representations.
Scott, A., Fujii, K., and Onishi, M. (2022). How does AI
play football? An analysis of RL and real-world foot-
ball strategies. In 14th International Conference on
Agents and Artificial Intelligence (ICAART’ 22), vol-
ume 1, pages 42–52.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the game of go with deep neural networks
and tree search. nature, 529(7587):484–489.
Song, J., Ren, H., Sadigh, D., and Ermon, S. (2018). Multi-
agent generative adversarial imitation learning. In
Proceedings of the 32nd International Conference on
Neural Information Processing Systems, pages 7472–
7483.
Tampuu, A., Matiisen, T., Kodelja, D., Kuzovkin, I., Korjus,
K., Aru, J., Aru, J., and Vicente, R. (2017). Multiagent
cooperation and competition with deep reinforcement
learning. PloS one, 12(4):e0172395.
Tappert, C. C., Suen, C. Y., and Wakahara, T. (1990).
The state of the art in online handwriting recognition.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 12(8):787–808.
Teranishi, M., Fujii, K., and Takeda, K. (2020). Trajectory
prediction with imitation learning reflecting defensive
evaluation in team sports. In 2020 IEEE 9th Global
Conference on Consumer Electronics (GCCE), pages
124–125. IEEE.
Teranishi, M., Tsutsui, K., Takeda, K., and Fujii, K. (2022).
Evaluation of creating scoring opportunities for team-
mates in soccer via trajectory prediction. In Interna-
tional Workshop on Machine Learning and Data Min-
ing for Sports Analytics. Springer.
Tsutsui, K., Takeda, K., and Fujii, K. (2023). Synergizing
deep reinforcement learning and biological pursuit be-
havioral rule for robust and interpretable navigation.
In 1st Workshop on the Synergy of Scientific and Ma-
chine Learning Modeling in International Conference
on Machine Learning.
Tsutsui, K., Tanaka, R., Takeda, K., and Fujii, K. (2022a).
Collaborative hunting in artificial agents with deep re-
inforcement learning. bioRxiv.
Tsutsui, K., Tanaka, R., Takeda, K., and Fujii, K. (2022b).
Emergence of collaborative hunting via multi-agent
deep reinforcement learning. In ICPR Workshop on
Human Behavior Understanding. Springer.
Van Hasselt, H., Guez, A., and Silver, D. (2016). Deep re-
inforcement learning with double q-learning. In Pro-
ceedings of the AAAI Conference on Artificial Intelli-
gence, volume 30.
Van Roy, M., Robberechts, P., Yang, W.-C., De Raedt,
L., and Davis, J. (2021). Learning a markov model
for evaluating soccer decision making. In Reinforce-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
38

ment Learning for Real Life (RL4RealLife) Workshop
at ICML 2021.
Vecerik, M., Hester, T., Scholz, J., Wang, F., Pietquin,
O., Piot, B., Heess, N., Rothörl, T., Lampe, T.,
and Riedmiller, M. (2017). Leveraging demonstra-
tions for deep reinforcement learning on robotics
problems with sparse rewards. arXiv preprint
arXiv:1707.08817.
Vintsyuk, T. K. (1968). Speech discrimination by dynamic
programming. Cybernetics, 4(1):52–57.
Yeh, R. A., Schwing, A. G., Huang, J., and Murphy, K.
(2019). Diverse generation for multi-agent sports
games. In The IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Zare, N., Amini, O., Sayareh, A., Sarvmaili, M., Firouzk-
ouhi, A., Matwin, S., and Soares, A. (2021). Improv-
ing dribbling, passing, and marking actions in soccer
simulation 2d games using machine learning. In Robot
World Cup, pages 340–351. Springer.
Zhan, E., Zheng, S., Yue, Y., Sha, L., and Lucey, P. (2019).
Generating multi-agent trajectories using program-
matic weak supervision. In International Conference
on Learning Representations.
Zheng, S., Yue, Y., and Hobbs, J. (2016). Generating long-
term trajectories using deep hierarchical networks. In
Advances in Neural Information Processing Systems
29, pages 1543–1551.
Zhu, Z., Lin, K., and Zhou, J. (2020). Transfer learning in
deep reinforcement learning: A survey. arXiv preprint
arXiv:2009.07888.
Zhu, Z. and Zhao, H. (2021). A survey of deep rl and il for
autonomous driving policy learning. IEEE Transac-
tions on Intelligent Transportation Systems.
Adaptive Action Supervision in Reinforcement Learning from Real-World Multi-Agent Demonstrations
39
