
Variance Reduction of Resampling for Sequential Monte Carlo
Xiongming Dai
a
and Gerald Baumgartner
b
Division of Computer Science and Engineering, Louisiana State University, Baton Rouge, 70803, LA, U.S.A.
Keywords:
Resampling, Sequential Monte Carlo, Hidden Markov Model, Repetitive Ergodicity, Deterministic Domain.
Abstract:
A resampling scheme provides a way to switch low-weight particles for sequential Monte Carlo with higher-
weight particles representing the objective distribution. The less the variance of the weight distribution is, the
more concentrated the effective particles are, and the quicker and more accurate it is to approximate the hidden
Markov model, especially for the nonlinear case. Normally the distribution of these particles is skewed, we
propose repetitive ergodicity in the deterministic domain with the median for resampling and have achieved the
lowest variances compared to the other resampling methods. As the size of the deterministic domain M ≪ N
(the size of population), given a feasible size of particles under mild assumptions, our algorithm is faster than
the state of the art, which is verified by theoretical deduction and experiments of a hidden Markov model in
both the linear and non-linear cases.
1 INTRODUCTION
Sequential Monte Carlo (SMC) or Particle Fil-
ter (Gordon et al., 1993) is a set of Monte Carlo
methods for solving nonlinear state-space models
given noisy partial observations, which are widely
used in signal and image processing (S
¨
arkk
¨
a et al.,
2007), stock analysis (Casarin et al., 2006; Flury
and Shephard, 2011; Dai and Baumgartner, 2023a;
Dai and Baumgartner, 2023d), Bayesian inference
(Del Moral et al., 2006; Dai and Baumgartner, 2023b;
Dai and Baumgartner, 2023c) or robotics (Fox, 2001;
Montemerlo et al., 2002; Thrun, 2002). It updates
the predictions recursively by samples composed of
weighted particles to infer the posterior probability
density. While the particles will be impoverished as
the sample forwards recursively, it can be mitigated
by resampling where the negligible weight particles
will be replaced by other particles with higher weights
(Doucet et al., 2000; Del Moral et al., 2012; Doucet
et al., 2001).
In the literature, several resampling methods and
corresponding theoretical analysis (K
¨
unsch et al.,
2005; Chopin et al., 2004; Douc and Moulines, 2007;
Gilks and Berzuini, 2001) can be found. The fre-
quently used algorithms are residual resampling (Liu
and Chen, 1998), multinomial resampling (Gordon
et al., 1993), stratified resampling (Smith, 2013),
a
https://orcid.org/0009-0001-8540-3276
b
https://orcid.org/0009-0007-1162-159X
and systematic resampling (Kitagawa, 1996; Arulam-
palam et al., 2002). A justified decision regarding
which resampling strategies to use might result in a
reduction of the overall computation effort and high
accuracy of the estimations of the objective. How-
ever, for resampling, most of these strategies traverse
repetitively from the original population, the negligi-
ble weight particles fail to be discarded completely,
although the diversity of the particle reserve, it causes
unnecessary computational load for a very heavily
skewed distribution of particles and affects the accu-
racy of estimations of the posterior distribution. From
the perspective of complexity and variance reduction
with promising estimation, we propose a repetitive
deterministic domain ergodicity strategy, where more
concentrated and effective particles are drawn to ap-
proximate the objective. Our proposal can be widely
used in large-sample approximations.
In this paper, we concentrate on the analysis of
the importance sample resamplings built-in SMC for
the hidden Markov model. In Section 2, we present a
brief introduction to SMC. Here, a brief introduction
to the hidden Markov model and the sequential im-
portance sampling method will be given. Our method
will be introduced in Section 3, where we introduce
the origin of our method, and how to implement each
step in detail, and then the theoretical asymptotic be-
havior of approximations using our method is pro-
vided. The practical experiments will be validated by
Section 4, where performance and complexity analy-
34
Dai, X. and Baumgartner, G.
Variance Reduction of Resampling for Sequential Monte Carlo.
DOI: 10.5220/0012252100003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 34-41
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
sis are presented. The summary of our contributions
is outlined in Section 5.
2 RESAMPLING IN SMC FOR
HIDDEN MARKOV MODEL
Consider the state-space model, which is also known
as a hidden Markov model, described by
X
t
| X
t−1
∼ f (X
t
| X
t−1
), Y
t
| X
t
∼ g(y
t
| X
t
). (1)
The initial state X
0
∼ µ(X
0
), X
t
,(t = 1,2,...n) is
a latent variable to be observed, the measurements Y
t
are assumed to be conditionally independent given X
t
,
the most objective is to estimate X
t
.
The recursive Bayesian estimation can be used
and it is described as:
(a) Prediction:
π(X
t
| y
1:t−1
) =
Z
f (X
t
| X
t−1
)π(X
t−1
| y
1:t−1
)dX
t−1
.
(2)
(b) Update:
π(X
t
| y
1:t
) =
g(y
t
| X
t
)π(X
t
| y
1:t−1
)
R
g(y
t
| X
t
)π(X
t
| y
1:t−1
)dX
t
. (3)
From (2) and (3) the integral part is unreachable,
especially, for high-dimensional factors involved, we
fail to get the close form of π(X
t
|y
1:t
) (S
¨
arkk
¨
a, 2013;
Doucet and Johansen, 2009).
Sequential Monte Carlo is a recursive algorithm
where a cloud of particles are propagated to approx-
imate the posterior distribution π(X
0:t
| y
1:t
). Here,
we describe a general algorithm that generates at time
t, N particles
n
X
(i)
0:t
o
N
i=1
with the corresponding em-
pirical measure
ˆ
π(X
0:t
| y
1:t
) =
∑
N
i=1
w
i
t
δ
(i)
X
0:t
(dX
0:t
), a
discrete weighted approximation of the true posterior
π(X
0:t
|y
1:t
), δ
(i)
X
0:t
(dX
0:t
) denotes the delta-Dirac mass
located at X
t
, dX
0:t
equals to X
0:t
−X
i
0:t
. The particles
are drawn recursively using the observation obtained
at time t and the set of particles
n
X
(i)
0:t−1
o
N
i=1
drawn
at time t −1, accordingly, where
ˆ
π(X
0:t−1
| y
1:t−1
) ≈
π(X
0:t−1
| y
1:t−1
). The weights are normalized us-
ing the principle of importance sampling such that
∑
N
i=1
w
i
t
= 1. If the samples X
i
0:t
are drawn from an
importance density q(X
i
0:t
| y
1:t
), we have
w
i
t
∝
π(X
i
0:t
| y
1:t
)
q(X
i
0:t
| y
1:t
)
. (4)
Suppose at time step t −1, we have existed sam-
ples to approximate the current posterior distribution
π(X
0:t−1
| y
1:t−1
), if we get a new observation y
t
at
time t, a recursive approximation to π(X
0:t
| y
1:t
) with
a new set of samples can be obtained by importance
sampling, the corresponding factorization (Arulam-
palam et al., 2002) is described by
q(X
0:t
| y
1:t
) := q(X
t
| X
0:t−1
,y
1:t
)q(X
0:t−1
| y
1:t−1
).
(5)
Then, we can get the new samples X
i
0:t
∼ q(X
0:t
|
y
1:t
) by propagating each of the existing samples
X
i
0:t−1
∼q(X
0:t−1
|y
t−1
) with the new state X
i
t
∼q(X
t
|
X
0:t−1
,y
t
). To derive the weight update equation, we
follow the ergodic Markov chain properties of the
model, the full posterior distribution π(X
0:t
| y
1:t
) can
be written recursively in terms of π(X
0:t−1
| y
1:t−1
),
g(y
t
|X
t
) and f (X
t
|X
t−1
) (Arulampalam et al., 2002):
π(X
0:t
| y
1:t
) =
p(y
t
| X
0:t
,Y
1:t−1
)p(X
0:t
| y
1:t−1
)
p(y
t
| y
1:t−1
)
,
π
1:t
∝ g(y
t
| x
t
) f (x
t
| x
t−1
)π
1:t−1
,
(6)
where π
1:t
is short for π(X
0:t
| y
1:t
). By substituting
(5) and (6) into (4), we have
w
i
t
∝
g(y
t
| X
i
t
) f (X
i
t
| X
i
t−1
)p(X
i
0:t−1
| y
1:t−1
)
q(X
i
t
| X
i
0:t−1
,Y
1:t
)q(X
i
0:t−1
|Y
1:t−1
)
= w
i
t−1
g(y
t
| X
i
t
) f (X
i
t
| X
i
t−1
)
q(X
i
t
| X
i
0:t−1
,y
1:t
)
.
(7)
We assume the state X
t
is ergodic Markovian, thus,
q
t
= q(X
i
t
| X
i
0:t−1
,y
1:t
) = q(X
i
t
| X
i
t−1
,y
t
), from this
point, we only need to store the X
i
t
, and obtain the
thinning recursively update weight formula (Gordon
et al., 2004):
w
i
t
∝ w
i
t−1
g(y
t
| x
i
t
) f (x
i
t
| x
i
t−1
)
q(x
i
t
| x
i
t−1
,y
t
)
. (8)
The corresponding empirical posterior filtered density
π(X
t
| y
1:t
) can be approximated as
ˆ
π(X
t
| y
1:t
) =
N
∑
i=1
w
i
t
δ
(i)
X
t
(dX
t
). (9)
It can be shown that as N → ∞,
ˆ
π(X
t
| y
1:t
) con-
verges to π(X
t
| y
1:t
).
Ideally, the importance density function should
be the posterior distribution itself, π(X
0:t
| y
1:t
). The
variance of importance weights increases over time,
which will decrease the accuracy and lead to degener-
acy that some particles make up negligible normal-
ized weights. The brute force approach to reduc-
ing the effect of degeneracy is to increase N as large
as possible. However, as the size of the sample in-
creases, the computation of the recursive step will
Variance Reduction of Resampling for Sequential Monte Carlo
35
also be exponentially costly. Generally, we can try
two ways to improve: (I) suitable importance density
sampling; (II) resampling the weights. Here we fo-
cus on the latter. A suitable measure of the degener-
acy of an algorithm is the effective sample size N
eff
introduced in (Arulampalam et al., 2002): N
eff
=
N
1+Var(w
∗i
t
)
, w
∗i
t
=
π(X
i
t
|y
1:t
)
q(X
i
t
|X
i
t−1
,y
t
)
, while the close solu-
tion is unreachable, it could be approximated (Liu,
2008) by
ˆ
N
eff
=
1
∑
N
i=1
(w
i
t
)
2
. If the weights are uniform,
w
i
t
=
1
N
for each particle i = 1, 2,..., N, N
eff
= N; If
there exists the unique particle, whose weight is 1, the
remaining are zero, N
eff
= 1. Hence, small N
eff
eas-
ily leads to a severe degeneracy (Gordon et al., 2004).
We use
ˆ
N
eff
as an indicator to measure the condition
of resampling for our experiments in section 4.
We will introduce our proposal based on the repet-
itive deterministic domain traverse in the next section.
3 REPETITIVE ERGODICITY IN
DETERMINISTIC DOMAIN
WITH MEDIAN FOR
RESAMPLING
3.1 Multinomial Sampling
A Multinomial distribution provides a flexible frame-
work with parameters p
i
,i = 1,..., k and N, to mea-
sure the probability that each class i ∈ 1, ...,k has
been sampled N
i
times over N categorical indepen-
dent tests. It can be used to resample the tag in our
proposal in two steps. Firstly, we obtain the samples
from a uniform generator u
i
∼ U(0, 1],i = 1, ...,N;
secondly, we evaluate the index j of samples with
the generalized inverse rule, if the cumulative sum of
samples
∑
j
i=1
w
i
larger or equal to u
i
, this index j will
be labeled, then the corresponding sample w
i
will be
resampled, this event can be mathematically termed
as g
′
(w
i
) = I
w
i
=w
j
.
3.2 Deterministic Domain Construction
The population of weights is divided into two parts.
The first part is the weights, larger than the average
1
N
, they are considered as the candidate firstly to
be sampled, we keep r
i
=
N ˆw
i
t
replicates of ˆw
i
t
for each i, where ˆw
i
t
is the renormalized unit. r
i
will be filtered one by one from the population,
and the corresponding tag j will be saved into an
array. We find, this part also follows the multinomial
distribution W
i
∼ Multinomial(M; ˆw
1
,... ˆw
M
), We
extract the samples from the population with the
rule of multinomial sampling shown in section 3.1.
This step is the first layer of the traverse from the
population, we achieve the ancestor subset. Since the
distribution of these particles is very heavily skewed,
we extract the median of these particles to add to the
set of descendant particles. Then, we renormalized
the weights in the subset, and traverse again to
differentiate the larger weights and other units, until
we get the feasible size of the set to be considered
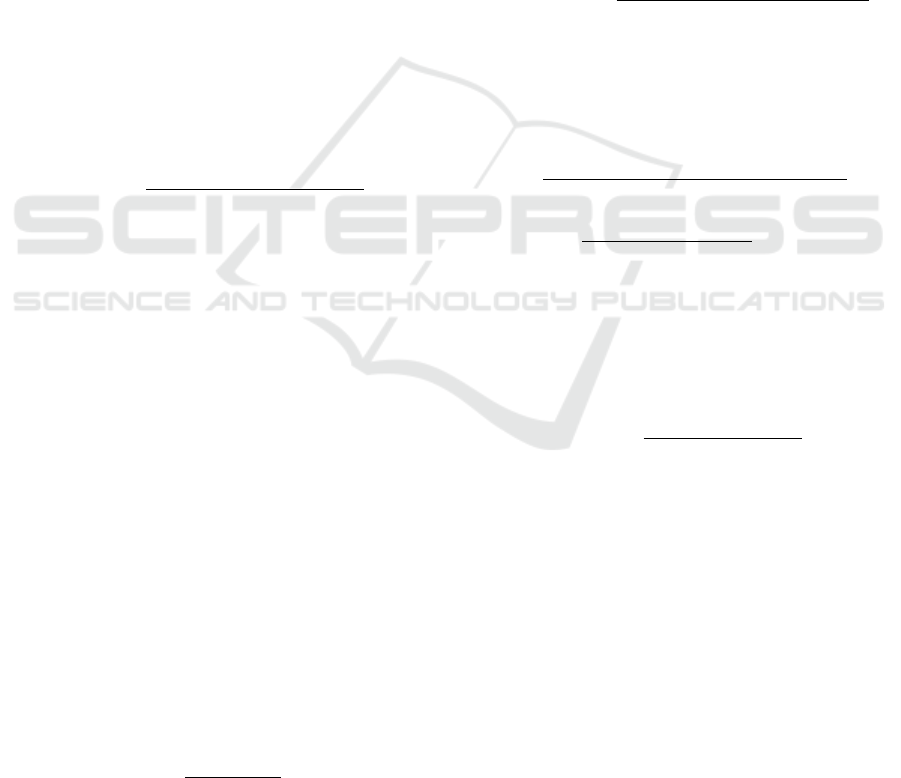
as the potential deterministic domain. The particles
in this domain follow a very strict Markovian, the
evolution can be expressed as follows, where w
tN
denotes the weight corresponding to the particle
˜
X
(N)
t
at t.
w
11
w
12
w
1N
t = 1
w
22
w
21
w
2N
t = 2
t = T
w
T 2
w
T 1
w
T N
···
.
.
.
.
.
.
.
.
.
We define the integer part event, g
′
( ˆw
i
) = I
ˆw
i
= ˆw
j
,
similarly for the following repetitive part, ¯g( ¯w
i
) =
I
¯w
i
= ¯w
j
. We count the units involved in the occurrence
of the event g
′
( ˆw
i
) and ¯g( ¯w
i
), then extract these units
based on the tags j, which forms the final determinis-
tic domain.
3.3 Repetitive Ergodicity in
Deterministic Domain with Median
Schema
Our goal is to retract and retain units with large
weights, while the remaining ones with low weights
can be effectively replaced in the populations. We set
the desired number of resampled units as the size of
populations under the premise of ensuring unit diver-
sity as much as possible.
We normalized all the units to keep the same
scaled level for comparison, after that, the units with
higher weights above the average level will appear as
real integers (larger than zero) by Ns = floor(N. ∗w),
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
36

the remaining will be filtered to zero. This is the pre-
requisite for the deterministic domain construction. In
Ns subset, there exist multiple categorical units, that
follow the multinomial distribution. We sample these
termed large units with two loops, the outer loop is to
bypass the index of the unit zero, and the inner loop
is to traverse and sample the subset where different
large units distribute, there more large weights will
be sampled multiple times.
The last procedure is to repetitively traverse in
the deterministic domain with median, where each
unit will be renormalized and the corresponding cu-
mulative summation is used to find the index of the
unit with the rule of the inverse cumulative distribu-
tion function. Each desired unit will be drawn by the
multinomial sampler to rejuvenate the population re-
cursively. The complexity of our method is O(M). As
the size of the deterministic domain M ≪ N (the size
of population), given a feasible size of particles, our
algorithm is faster than the state of the art. The total
implement schema is shown in Algorithm 1.
3.4 Theoretical Asymptotic Behavior of
Approximations
3.4.1 Central Limit Theorem
Suppose that for each t ∈ [1,T ],
˜
X
(1)
t
,...,
˜
X
(M)
t
are in-
dependent, where
˜
X
(m
′
)
t
,m
′
∈ [1,M] denotes the me-
dian of the originator particles. For others
˜
X
(i)
t
,i ̸= m
′
belong to the deterministic domain; the probability
space of the sequence recursively changes with t for
sequential Monte Carlo, such a collection is called a
triangular array of particles. Let S
m
:=
˜
X
(1)
t
+ ... +
˜
X
(M)
t
. We expand the characteristic function of each
˜
X
(i)
t
to second-order terms and estimate the remainder
to establish the asymptotic normality of S
m
. Suppose
that both the expectation and the variance exist and
are finite:
E
π
t
(X
(i)
t
) =
Z
X
t
∈Ω
X
(i)
t
π
t
(dX
t
)q(X
t
,dX
t+1
) < ∞,
δ
2
t,i
(X
(i)
t
) = E[(X
(i)
t
−E(X
(i)
t
))
2
] < ∞.
(10)
Theorem 1 For each t the sequence
˜
X
(1)
t
,...,
˜
X
(M)
t
sampled from the originator particles X
(1)
t
,..., X
(N)
t
,
suppose that are independent, where
˜
X
(m
′
)
t
,m
′
∈[1,M]
denotes the median of the originator particles. For the
rest
˜
X
(i)
t
,i ̸= m
′
belong to the deterministic domain;
let Ψ be a measurable function and assume that there
Input: The input weight sequence:w; the
desired number of resampled
particles: N
Output: The resampled tag of the weight
sequence tag
if nargin==1 then
N ← length(w); // Desired size
end
M ← length(w);
w ← w/sum(w); // Normalization
tag ←zeros(1,N);
Ns ← floor(N. ∗w); // Integer parts
R ← sum(Ns);
i ← 1; // Extract deterministic part
j ← 0;
while j < M do
j ← j + 1;
count ← 1;
while count <= Ns(j) do
tag(i) ← j;
i ← i + 1;
count ← count + 1;
end
end
[W,I] = sort(w); // Median extraction
r = f loor((N + 1)/2);
tag(i) = I(r);
i = i + 1; // Deterministic domain
w ←tag/sum(tag);
q ← cumsum(w)
while i<=N do
sampl ← rand;
j ← 1;
while q(j)<sampl do
j ← j + 1; // Update the tag
end
tag(i) ←tag( j);
i ← i + 1;
end
Algorithm 1: Repetitive Deterministic Domain with
Median Traversal Resampling.
exists
˜
X
t
⊂ K satisfying
Z
x∈K
π(dx)E
x
"
T
∑
t=1
|
Ψ(X
t
)
|
2+ε
#
< ∞ (11)
and
sup
x∈K
E
x
"
T
∑
t=1
|
Ψ(X
t
)
|
#
< ∞,
E
π
t
[Ψ] :=
Z
K
π(dx)E
x
"
N
∑
i=1
Ψ(X
(i)
)
#
< ∞.
(12)
If
˜
X
t
is aperiodic, irreducible, positive Harris recur-
rent with invariant distribution π and geometrically
Variance Reduction of Resampling for Sequential Monte Carlo
37

ergodic, and if, in addition,
δ
2
t,i
(Ψ) :=
Z
π(dx)E
x
Ψ(
˜
X
(i)
t
) −E
π
t
[Ψ]
2
< ∞,
s
2
m
:= lim
M→∞
M
∑
i=1
δ
2
t,i
(Ψ),
(13)
{Ψ(
˜
X
(i)
t
} satisfies
lim
M→∞
M
∑
i=1
n
Ψ(
˜
X
(i)
t
) −E
π
t
[Ψ]
o
∼ N(0, s
2
m
). (14)
Proof Let Y
t,i
= Ψ(
˜
X
(i)
t
) − E
π
t
[Ψ], by (Billingsley,
1995),
e
iy
−
∑
M
k=0
(iy)
k
k!
≤ min{
(y)
M+1
(M+1)!
,
2(y)
M
M!
}, when
M = 2, we have
e
iy
−(1 + iy −
1
2
y
2
)
≤ min{
1
6
|
y
|
3
,
|
y
|
2
}. (15)
We first assume that Ψ(·) is bounded, from
the property of characteristic function, the left-hand
side can be written as
E
h
e
(iλY
t,i
)
|K
i
−(1 −
λ
2
δ
2
t,i
(Ψ)
2
)
,
therefore, the corresponding character function
ϕ
t,i
(λ) of Y
t,i
satisfies
ϕ
t,i
(λ) −(1 −
λ
2
δ
2
t,i
(Ψ)
2
)
≤ E
h
min{
|
λY
t,i
|
2
,
1
6
|
λY
t,i
|
3
}
i
.
(16)
Note that the expected value exists and is finite, the
right-hand side term can be integrated by
Z
|
Y
t,i
|
≥εδ
t,i
√
M
E
min{
|
λY
t,i
|
2
,
1
6
|
λY
t,i
|
3
}
dx. (17)
As M → +∞,{Y
t,i
} →
/
0, then,
E
h
min{
|
λY
t,i
|
2
,
1
6
|
λY
t,i
|
3
}
i
→ 0, which satisfies
Lindeberg condition:
lim
M→∞
M
∑
i=1
1
s
2
m
Z
|
Y
t,i
|
≥εδ
t,i
√
M
Y
2
t,i
dX = 0, (18)
for ε > 0,s
2
m
=
∑
M
i=1
δ
2
t,i
(Ψ).
lim
M→∞
ϕ
t,i
(λ) −(1 −
λ
2
δ
2
t,i
(Ψ)
2
)
= 0. (19)
By (26.11) in page 345 (Billingsley, 1995),
ϕ
t,i
(λ) = 1 + iλE[X] −
1
2
λ
2
E[X
2
] + o(λ
2
),λ → 0.
(20)
By Lemma 1 in page 358 (Billingsley, 1995),
M
∏
i=1
e
−λ
2
δ
2
t,i
(Ψ)/2
−
M
∏
i=1
(1 −
1
2
λ
2
δ
2
t,i
(Ψ))
≤
M
∑
i=1
e
−λ
2
δ
2
t,i
(Ψ)/2
−1 +
1
2
λ
2
δ
2
t,i
(Ψ)
≤
M
∑
i=1
"
1
4
λ
4
δ
4
t,i
(Ψ)
∞
∑
j=2
1
2
j−2
λ
2 j−4
δ
2 j−4
t,i
(Ψ)
j!
#
≤
M
∑
i=1
1
4
λ
4
δ
4
t,i
(Ψ)e
|
1
2
λ
2
δ
2
t,i
(Ψ)
|
.
(21)
Thus,
M
∏
i=1
e
−λ
2
δ
2
t,i
(Ψ)/2
=
M
∏
i=1
(1 −
1
2
λ
2
δ
2
t,i
(Ψ)) + o(λ
2
)
=
M
∏
i=1
e
−λ
2
δ
2
t,i
(Ψ)/2
+ o(λ
2
)
= e
−
λ
2
s
2
m
2
+ o(λ
2
).
(22)
The characteristic function
∏
M
i=1
ϕ
t,i
(λ) of
∑
M
i=1
Y
t,i
=
∑
M
i=1
n
Ψ(X
(i)
t
) −E
π
t
[Ψ]
o
is equal to
e
−
λ
2
s
2
m
2
, thus, (14) holds.
4 EXPERIMENTS
In this part, the results of the comparison of these re-
sampling methods are validated from the experiments
with the linear Gaussian state space model and non-
linear state space model, respectively. We ran the ex-
periments on an HP Z200 workstation with an Intel
Core i5 and an #82 −18.04.1− Ubuntu SMP kernel.
4.1 Linear Gaussian State Space Model
This linear model is expressed by:
X
0
∼ µ(X
0
),
X
t
| X
t−1
∼ N(X
t
;φX
t−1
,δ
2
v
),
Y
t
| X
t
∼ N(y
t
;X
t
,δ
2
e
),
(23)
we keep parameters the same as (Dahlin and
Sch
¨
on, 2019) to compare with the different resam-
pling methods. Where θ =
{
φ,δ
v
,δ
e
}
,φ ∈ (−1,1) de-
scribes the persistence of the state, while δ
v
,δ
e
denote
the standard deviations of the state transition noise
and the observation noise, respectively. The Gaus-
sian density is denoted by N(x; µ,δ
2
) with mean µ and
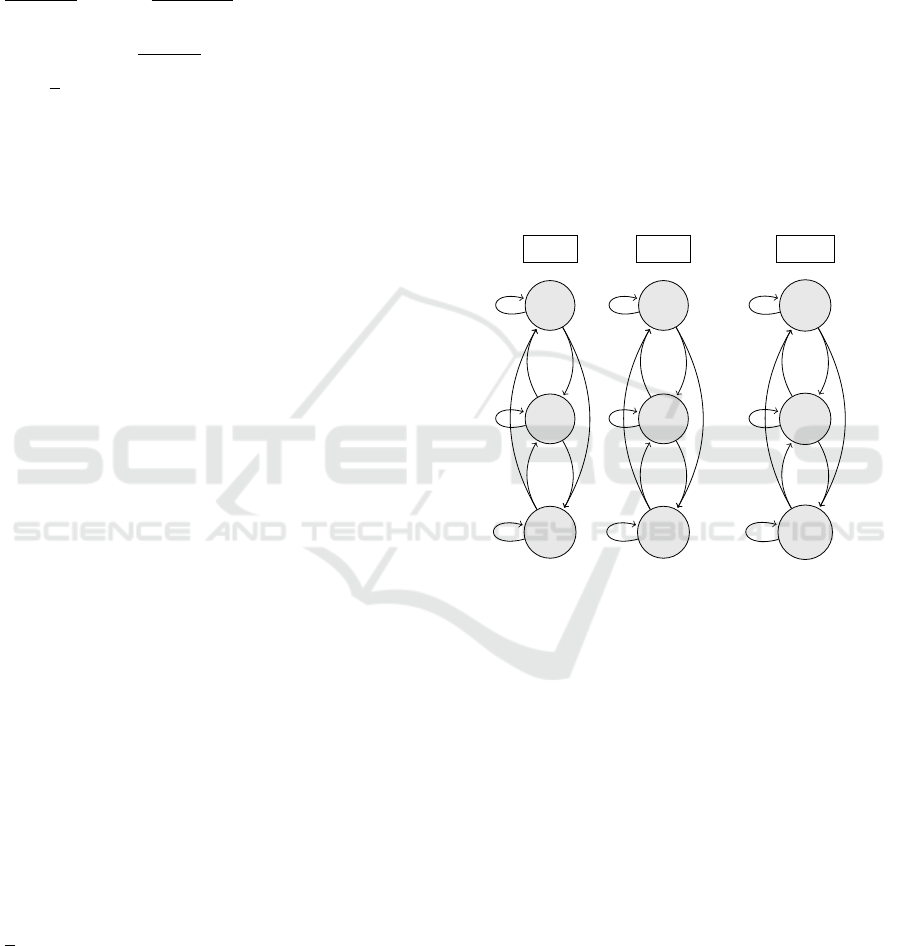
standard deviation δ > 0. In Figure 1, we use 20 par-
ticles to track the probability distribution of the state,
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
38
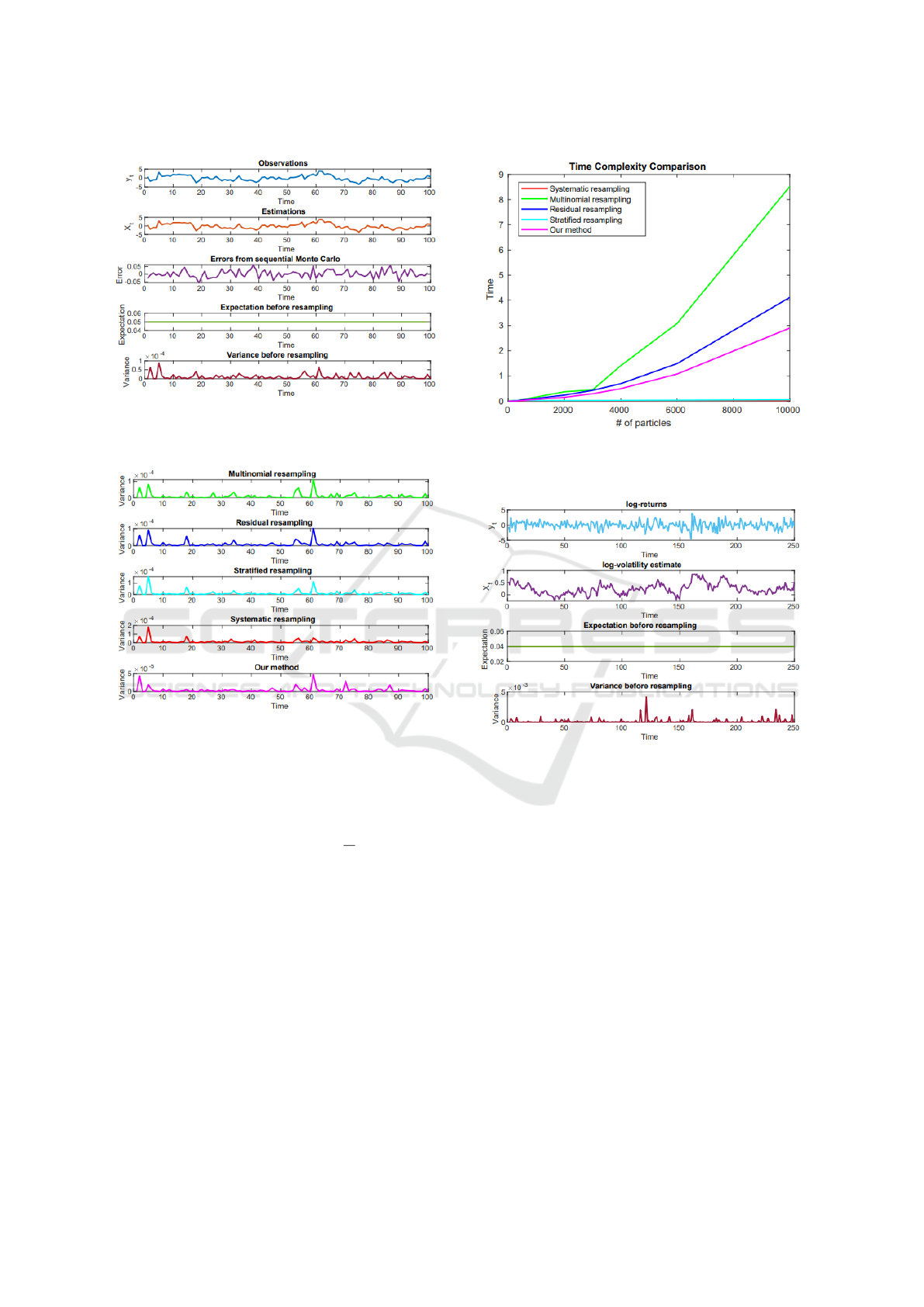
Figure 1: Repetitive deterministic traverse resampling for
linear Gaussian state space model.
Figure 2: Variance analysis for different resampling strate-
gies (note the different scales in the Variance axis).
composed of 100 different times, the ground truth is
from the Kalman filter (Welch et al., 1995), the er-
ror denotes the difference between the estimation by
SMC and the ground truth. Initially, the expectation
of weights for 20 particles is equal to
1
20
, which means
that these particles have equal functions to track the
state.
For the resampling procedure, we compare the
variance from different classical resampling methods,
shown in Figure 2. The variance from the determin-
istic traverse method is the smallest. Thus, the effec-
tive particles are more concentrated after resampling
based on our proposal.
The computational complexity is another factor
the resampling algorithms are compared on, Figure 3
shows the execution times for different particles dis-
tributed, generally, it depends on the machines and
random generator, during our simulations, the time
consumption is different under the same condition of
resampling method and number of particles. Further-
Figure 3: Time complexity analysis for different resampling
strategies.
Figure 4: (a) The daily log-returns. (b) The estimated log-
volatility with 95% confidence intervals of the NASDAQ
OMXS30 index for the period from January 2, 2015 to Jan-
uary 2, 2016. (c) The expectation of weights for particles
before resampling. (d)The variance of weights for particles
before resampling.
more, we find under the same resampling methods,
the time consumed for the small size of particles is
much more than that of the larger ones. The compu-
tational stability of particles with resampling methods
is very sensitive to the units from a specific popula-
tion. For safety, we conduct multiple experiments to
achieve the general complexity trend.
In Figure 3, all the experiments are conducted un-
der the same conditions, for large-size particles, the
stratified and systematic strategies are favorable. In
Table 1, we can find under small-size particles(less
than 150), our method performs best.
Variance Reduction of Resampling for Sequential Monte Carlo
39
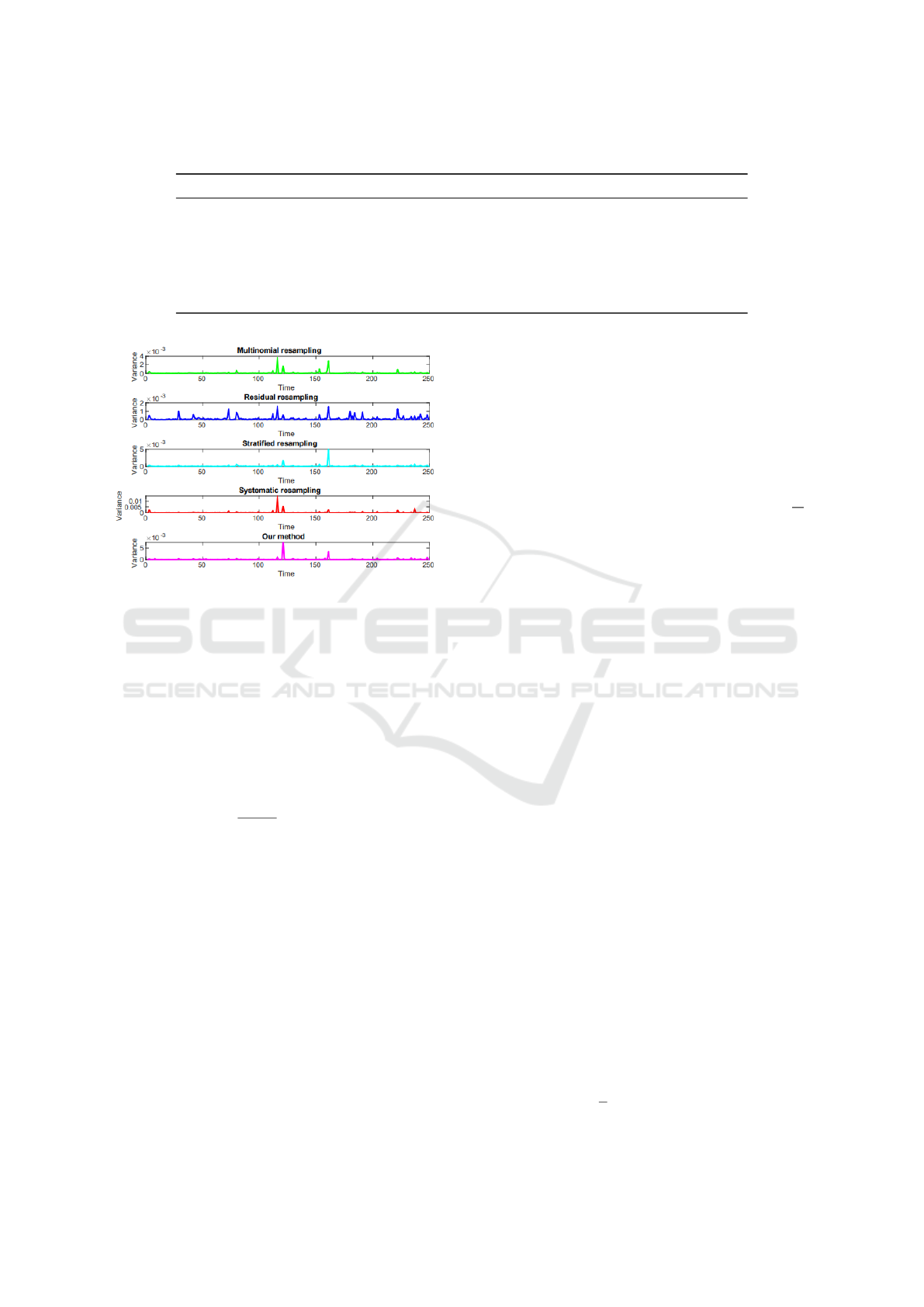
Table 1: Time complexity analysis of different resampling strategies.
# of particles Multinomial resampling Residual resampling Systematic resampling Stratified resampling Our method
5 0.0026 0.0021 0.0019 0.0023 0.0016
15 0.0036 0.0025 0.0022 0.0033 0.0018
50 0.0057 0.0027 0.0024 0.0047 0.0022
80 0.0087 0.0032 0.0029 0.0051 0.0027
100 0.0127 0.0038 0.0034 0.0067 0.0030
150 0.0161 0.0043 0.0038 0.0088 0.0036
Figure 5: Variance analysis of different resampling strate-
gies for nonlinear state space model (note the different
scales in the Variance axis).
4.2 Nonlinear State Space Model
We continue with a real application of our proposal to
track the stochastic volatility, a nonlinear State Space
Model with Gaussian noise, where log volatility con-
sidered as the latent variable is an essential element
in the analysis of financial risk management. The
stochastic volatility is given by
X
0
∼ N(µ,
σ
2
v
1 −ρ
2
),
X
t
| X
t−1
∼ N(µ + ρ(X
t−1
−µ),σ
2
v
),
Y
t
| X
t
∼ N(0, exp(X
t
)τ),
(24)
where the parameters θ =
{
µ,ρ,σ
v
,τ
}
, µ ∈ R,ρ ∈
[−1,1], σ
v
and τ ∈ R
+
, denote the mean value, the
persistence in volatility, the standard deviation of the
state process and the instantaneous volatility, respec-
tively.
The observations y
t
= log(p
t
/p
t−1
), also called
log-returns, denote the logarithm of the daily differ-
ence in the exchange rate p
t
, here, {p
t
}
T
t=1
is the
daily closing price of the NASDAQ OMXS30 index
(a weighted average of the 30 most traded stocks
at the Stockholm stock exchange). We extract the
data from Quandl for the period between January 2,
2015 and January 2, 2016. The resulting log-return
is shown in Figure 4. We use SMC to track the time-
series persistency volatility, large variations are fre-
quent, which is well-known as volatility clustering in
finance, from the equation (42), as |φ|is close to 1 and
the standard variance is small, the volatility clustering
effect easier occurs. We keep the same parameters
as (Dahlin and Sch
¨
on, 2019), where µ ∼ N(0,1),φ ∼
T N
[−1,1]
(0.95,0.05
2
), δ
v
∼ Gamma(2,10), τ = 1.
We use 25 particles to track the persistency volatil-
ity, the expectation of weights of particles is
1
25
,
shown in Figure 4, it is stable as the same with Fig-
ure 1, the variance is in 10
−3
orders of magnitude un-
der random sampling mechanism.
In Figure 5, the variance from our proposal shows
the minimum value at different times, nearly all the
plots share the common multimodal feature at the
same time, it stems from the multinomial distribution
that both of them have when they resample a new unit.
5 CONCLUSIONS
Resampling strategies are effective in Sequential
Monte Carlo as the weighted particles tend to de-
generate. However, we find that the resampling also
leads to a loss of diversity among the particles. This
arises because in the resampling stage, the samples
are drawn from a discrete multinomial distribution,
not a continuous one. Therefore, the new samples
fail to be drawn as a type that has never occurred
but stems from the existing samples by the repetitive
schema. We have presented a repetitive determinis-
tic domain with median traversal for resampling and
have achieved the lowest variances compared to other
resampling methods. As the size of the deterministic
domain M ≪N (the size of population), our algorithm
is faster than the state of the art, given a feasible size
of particles, which is verified by theoretical deduction
and experiments of the hidden Markov model in both
the linear and the non-linear case.
There is a special case in which the median of par-
ticles belong to a deterministic domain, the particles
with weight ˜w
i
t
≤
1
N
have been discarded, thus, the
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
40

particle set after resampling is biased. Since the re-
sampling scheme is repeated in the scaling domain,
the skewed particles are discarded completely, al-
though the total variance obtained by our method is
minimized compared to other resampling methods.
Since these sample points are biased when used for
target tracking, it will affect the accuracy of the tar-
get to some extent. Alternatively, if we give a certain
permissible error threshold for target localization and
tracking, we can also try the feasibility of our method
in this threshold, because it will be solved in a shorter
time with the minimum total variance compared to
other methods.
The broader impact of this work is that it can
speed up existing sequential Monte Carlo applications
and allow more precise estimates of their objectives.
There are no negative societal impacts, other than
those arising from the sequential Monte Carlo appli-
cations themselves.
REFERENCES
Arulampalam, M. S., Maskell, S., Gordon, N., and Clapp,
T. (2002). A tutorial on particle filters for on-
line nonlinear/non-Gaussian Bayesian tracking. IEEE
Transactions on Signal Processing, 50(2):174–188.
Billingsley, P. (1995). Measure and probability.
Casarin, R., Trecroci, C., et al. (2006). Business Cycle and
Stock Market Volatility: A Particle Filter Approach.
Universit
`
a degli studi, Dipartimento di scienze eco-
nomiche.
Chopin, N. et al. (2004). Central limit theorem for se-
quential Monte Carlo methods and its application to
Bayesian inference. Annals of Statistics, 32(6):2385–
2411.
Dahlin, J. and Sch
¨
on, T. B. (2019). Getting started with
particle Metropolis-Hastings for inference in nonlin-
ear dynamical models. Journal of Statistical Software,
88(2):1–41.
Dai, X. and Baumgartner, G. (2023a). Chebyshev particles.
arXiv preprint arXiv:2309.06373.
Dai, X. and Baumgartner, G. (2023b). Operator-
free equilibrium on the sphere. arXiv preprint
arXiv:2310.00012.
Dai, X. and Baumgartner, G. (2023c). Optimal camera con-
figuration for large-scale motion capture systems.
Dai, X. and Baumgartner, G. (2023d). Weighted Riesz par-
ticles. arXiv preprint arXiv:2312.00621.
Del Moral, P., Doucet, A., and Jasra, A. (2006). Sequential
monte carlo samplers. Journal of the Royal Statistical
Society Series B: Statistical Methodology, 68(3):411–
436.
Del Moral, P., Doucet, A., and Jasra, A. (2012). On adap-
tive resampling strategies for sequential monte carlo
methods.
Douc, R. and Moulines, E. (2007). Limit theorems
for weighted samples with applications to sequential
Monte Carlo methods. In ESAIM: Proceedings, vol-
ume 19, pages 101–107. EDP Sciences.
Doucet, A., De Freitas, N., Gordon, N. J., et al. (2001). Se-
quential Monte Carlo methods in practice, volume 1.
Springer.
Doucet, A., Godsill, S., and Andrieu, C. (2000). On se-
quential Monte Carlo sampling methods for Bayesian
filtering. Statistics and Computing, 10(3):197–208.
Doucet, A. and Johansen, A. M. (2009). A tutorial on parti-
cle filtering and smoothing: Fifteen years later. Hand-
book of Nonlinear Filtering, 12(656-704):3.
Flury, T. and Shephard, N. (2011). Bayesian inference
based only on simulated likelihood: particle filter
analysis of dynamic economic models. Econometric
Theory, pages 933–956.
Fox, D. (2001). Kld-sampling: Adaptive particle filters and
mobile robot localization. Advances in Neural Infor-
mation Processing Systems (NIPS), 14(1):26–32.
Gilks, W. R. and Berzuini, C. (2001). Following a moving
target—Monte Carlo inference for dynamic Bayesian
models. Journal of the Royal Statistical Society: Se-
ries B (Statistical Methodology), 63(1):127–146.
Gordon, N., Ristic, B., and Arulampalam, S. (2004). Be-
yond the Kalman filter: Particle filters for tracking ap-
plications. Artech House, London, 830(5):1–4.
Gordon, N. J., Salmond, D. J., and Smith, A. F. (1993).
Novel approach to nonlinear/non-Gaussian Bayesian
state estimation. In IEE Proceedings F (Radar and
Signal Processing), volume 140, pages 107–113. IET.
Kitagawa, G. (1996). Monte Carlo filter and smoother for
non-Gaussian nonlinear state space models. Journal
of Computational and Graphical Statistics, 5(1):1–25.
K
¨
unsch, H. R. et al. (2005). Recursive Monte Carlo fil-
ters: algorithms and theoretical analysis. The Annals
of Statistics, 33(5):1983–2021.
Liu, J. S. (2008). Monte Carlo Strategies in Scientific Com-
puting. Springer Science & Business Media.
Liu, J. S. and Chen, R. (1998). Sequential Monte Carlo
methods for dynamic systems. Journal of the Ameri-
can Statistical Association, 93(443):1032–1044.
Montemerlo, M., Thrun, S., and Whittaker, W. (2002). Con-
ditional particle filters for simultaneous mobile robot
localization and people-tracking. In Proceedings 2002
IEEE International Conference on Robotics and Au-
tomation (Cat. No. 02CH37292), volume 1, pages
695–701. IEEE.
S
¨
arkk
¨
a, S. (2013). Bayesian Filtering and Smoothing. Cam-
bridge University Press.
S
¨
arkk
¨
a, S., Vehtari, A., and Lampinen, J. (2007). Rao-
Blackwellized particle filter for multiple target track-
ing. Information Fusion, 8(1):2–15.
Smith, A. (2013). Sequential Monte Carlo Methods in Prac-
tice. Springer Science & Business Media.
Thrun, S. (2002). Particle filters in robotics. In UAI, vol-
ume 2, pages 511–518. Citeseer.
Welch, G., Bishop, G., et al. (1995). An introduction to the
Kalman filter. Technical report, University of North
Carolina at Chapel Hill, Chapel Hill, NC, USA.
Variance Reduction of Resampling for Sequential Monte Carlo
41
