
Which Objective Function is Solved Faster in Multi-Agent Pathfinding?
It Depends
Ji
ˇ
r
´
ı
ˇ
Svancara
1
, Dor Atzmon
2
, Klaus Strauch
3
, Roland Kaminski
3
and Torsten Schaub
3
1
Charles University, Czech Republic
2
Bar-Ilan University, Israel
3
University of Potsdam, Germany
Keywords:
Multi-Agent Pathfinding, Sum of Costs, Makespan, Search-Based Algorithm, Reduction-Based Algorithm.
Abstract:
Multi-agent pathfinding (MAPF) is the problem of finding safe paths for multiple mobile agents within a
shared environment. This problem finds practical applications in real-world scenarios like navigation, ware-
housing, video games, and autonomous intersections. Finding the optimal solution to MAPF is known to be
computationally hard. In the literature, two commonly used cost functions are makespan and the sum of costs.
To tackle this complex problem, various algorithms have been developed, falling into two main categories:
search-based approaches (e.g., Conflict Based Search) and reduction-based approaches, including reduction to
SAT or ASP. In this study, we empirically compare these two approaches in the context of both makespan and
the sum of costs, aiming to identify situations where one cost function presents more challenges than the other.
We compare our results with older studies and improve upon their findings. Despite these solving approaches
initially being designed for different cost functions, we observe similarities in their behavior. Furthermore,
we identify a tipping point related to the size of the environment. On smaller maps, the sum of costs is more
challenging, while makespan poses greater difficulties on larger maps for both solving paradigms, defying
intuitive expectations. Our study also offers insights into the reasons behind this behavior.
1 INTRODUCTION
Multi-agent pathfinding (MAPF) is the task of ma-
neuvering a group of agents within a shared envi-
ronment, ensuring they navigate without colliding.
This problem has practical applications in various
domains, including warehousing (Ma et al., 2017),
robotics (Bennewitz et al., 2002), navigation (Dresner
and Stone, 2008), and potentially the coordination of
autonomous vehicles in the foreseeable future.
Since the agents collaborate, there are situations
where an agent may prolong its path to facilitate an-
other’s passage, ultimately leading to a better global
solution. To enable such cooperation, a centralized
planner is typically employed, guaranteeing the opti-
mality of the plan according to a desired cost function.
Note that, decentralized planners exist but cannot en-
sure optimal solutions due to the problem’s inherent
combinatorial complexity (Alonso-Mora et al., 2010;
Sartoretti et al., 2019).
In this paper, we explore the behavior and perfor-
mance of two popular methods for achieving optimal
MAPF solutions: search-based and reduction-based
approaches, considering the two most commonly used
cost functions, makespan and the sum of costs. While
both approaches are capable of optimizing either cost
function it is noteworthy that each of them was orig-
inally designed with a specific cost function in mind.
Specifically, the search-based algorithm CBS was tai-
lored for optimizing the sum of costs (Sharon et al.,
2015), while the reduction-based solver was primar-
ily geared towards optimizing makespan (Surynek,
2012). Intuition might suggest that each solver ex-
cels at optimizing the cost function it was initially de-
signed for but we show that this is not always the case.
The contributions of this paper are threefold:
(1) We show that while both search-based and
reduction-based solvers can find makespan and sum
of costs optimal solutions, on smaller maps it is more
challenging to find the sum of costs optimal solution,
while on large maps it is more challenging to find
the makespan optimal solution for both approaches.
We show this empirically and provide insight into the
workings of the algorithms that explain this behavior.
(2) We compare our results with a previous studies
which concludes that makespan is always easier for
Švancara, J., Atzmon, D., Strauch, K., Kaminski, R. and Schaub, T.
Which Objective Function is Solved Faster in Multi-Agent Pathfinding? It Depends.
DOI: 10.5220/0012249400003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 23-33
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
23

both approaches (Surynek et al., 2016b; G
´
omez et al.,
2021). We arrive at different conclusions and explain
why the results are different, mainly focusing on the
size of the experimental setup.
(3) For the reduction-based solvers, we include
two different approaches to find the sum of costs op-
timal solution based on previous work (Bart
´
ak and
Svancara, 2019). Again, we arrive at different con-
clusions, in terms of the performance of the proposed
models, and explain why the results are different. The
difference is again mainly due to the experiment size.
On the other hand, we do not deeply compare the
performance of the solvers against each other, as our
implementations are not state-of-the-art for all of the
solvers, and as such, the comparison would be unfair.
2 DEFINITIONS
The Multi-Agent Pathfinding problem (MAPF) (Stern
et al., 2019) is a pair (G, A), where G is an undi-
rected graph G = (V, E) and A is a list of n agents
A = (a
1
, . . . , a
n
). Each agent a
i
∈ A is associated with
a start vertex s
i
∈ V and a goal vertex g
i
∈ V . Time
is considered discrete and between two consecutive
timesteps, an agent can either move to an adjacent
vertex (move action) or stay at its current vertex (wait
action). The movement of an agent is captured by its
path. A path π
i
of agent a
i
is a list of vertices that
starts at s
i
and ends at g
i
. Let π
i
(t) be the vertex (i.e.
location) of a
i
at timestep t according to π
i
. There-
fore, π
i
(0) = s
i
, π
i
(|π
i
|) = g
i
, and for all timesteps t,
(π
i
(t), π
i
(t + 1)) ∈ E or π
i
(t) = π
i
(t + 1), i.e. at each
timestep agent a
i
either moves over an edge or waits
in its current vertex, respectively.
As there are several agents, we are interested
in the interaction of each pair of paths. A tuple
a
i
, a
j
, x, t
represents a conflict between paths π
i
and
π
j
at timestep t if π
i
(t) = π
j
(t) (vertex conflict at ver-
tex x = π
i
(t)) or π
i
(t) = π
j
(t + 1) ∧ π
j
(t) = π
i
(t + 1)
(swapping conflict over edge x = (π
i
(t), π
i
(t + 1))).
A plan Π is a list of n paths Π = (π
1
, . . . , π
n
), one for
each agent. A solution is a conflict-free plan Π, where
no two paths of distinct agents have any conflicts.
A solution is optimal if it has the lowest cost
among all possible solutions. The cost C(π
i
) of path
π
i
equals the number of actions performed in π
i
un-
til the last arrival at g
i
, not counting any subsequent
wait actions. Formally, C(π
i
) = max({0 < t ≤ |π
i
| |
π
i
(t) = g
i
, π
i
(t −1) ̸= g
i
} ∪ {0}). Note that waiting at
the goal counts towards the cost if the agent leaves the
goal at any time in the future.
There are two commonly used cost functions to
evaluate a plan’s Π quality: (1) sum of costs (SOC),
𝑔
𝑗
𝑠
𝑗
𝑠
𝑖
𝑔
𝑖
𝑠
𝑗
𝑔
1
𝑠
2
𝑔
2
𝑠
1
𝐵
𝑔
1
𝐴
𝑠
2
𝐷
𝐶
𝑔
2
𝑠
1
𝐸 𝐹 𝐺 𝐻 𝐼
Figure 1: Example of SOC and MKS optimal solutions.
which is the sum of costs of all paths (C
SOC
(Π) =
∑
i
C(π
i
)); (2) makespan (MKS), which is the maxi-
mum cost among all paths (C
MKS
(Π) = max
i
C(π
i
)).
Solving MAPF optimally for either sum of costs
or makespan is known to be NP-hard (Yu and LaValle,
2013; Surynek, 2010). Figure 1Example of SOC and
MKS optimal solutions. presents a MAPF problem in-
stance with two agents a
1
and a
2
. Here, the optimal
solution for sum of costs is π
1
= (s
1
, E, F, G, H, I, g
1
)
and π
2
= (s
2
, B, A, g
2
), which yields C
SOC
(Π) = 9 and
C
MKS
(Π) = 6. The optimal solution for makespan is
π
1
= (s
1
, A, B,C, D, g
1
) and π
2
= (s
2
, s
2
, s
2
, B, A, g
2
),
which yields C
SOC
(Π) = 10 and C
MKS
(Π) = 5. This
illustrates that optimizing one cost function may in-
crease the other.
3 SEARCH-BASED SOLVER
Optimally solving MAPF can be naively performed
using a simple heuristic search algorithm, such as
A* (Hart et al., 1968), executing on a shared search
space containing all agents. In such a search space,
each node contains the locations of all agents at a spe-
cific timestep. The start node contains all start ver-
tices, the goal node contains all goal vertices, and a
transition between two nodes represents any possible
combination of movement of all agents. As the num-
ber of agents increases, the number of such combi-
nations increases exponentially. Therefore, problems
with more than a few agents become unsolvable in
practice when using such a coupled approach.
Conflict-Based Search (CBS) (Sharon et al., 2015)
is a prominent decoupled search-based algorithm for
optimally solving MAPF that overcomes the expo-
nential increase described above by finding paths for
the agents separately and resolving conflicts itera-
tively by imposing constraints on conflicting agents
until a conflict-free plan is found.
CBS builds a Constraint Tree (CT), where
each CT node N contains a set of constraints
constraints(N), a plan Π(N), and a cost cost(N) (i.e.
C(Π(N))). A constraint
⟨
a
i
, x, t
⟩
prohibits agent a
i
from occupying vertex x at timestep t or traversing
edge x between timesteps t and t + 1. The search of
a path for an agent under a set of constraints is called
a low-level search and can be performed by searching
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
24

Algorithm 1: High level of CBS.
1 CBS (MAPF problem instance)
2 Init OPEN
3 Init Root with an initial plan and no
constraints
4 Insert Root into OPEN
5 while OPEN is not empty do
6 N ← Pop the node with the lowest cost in
OPEN // according to SOC or MKS
7 if Π(N) is conflict-free then
8 return Π(N)
9
a
i
, a
j
, x,t
← get-conflict(N)
10 N
i
← GenerateChild(N,
⟨
a
i
, x,t
⟩
)
11 N
j
← GenerateChild(N,
a
j
, x,t
)
12 Insert N
i
and N
j
into OPEN
13 return No Solution
14 GenerateChild (Node N, Constraint
⟨
a
′
, x,t
⟩
)
15 constraints(N
′
) ← constraints(N)∪{
⟨
a
′
, x,t
⟩
}
16 Π(N
′
) ← Π(N)
17 Update Π(N
′
) to satisfy constraints(N
′
)
18 cost(N
′
) ← C(Π(N
′
))
19 return N
′
in a space-time configuration, e.g., using Space-Time
A* (Silver, 2005). Space-Time A* is similar to the
classical A*, but it also maintains time and can return
a path that satisfies a given set of constraints.
The search performed on the CT is called a high-
level search. The pseudo-code of the high-level search
of CBS is presented in Algorithm 1. The search
begins by initializing OPEN and a root node Root
with no constraints (lines 2-3). The plan Π(Root) is
planned by calling a chosen low-level solver for each
agent. The leaves of the CT are maintained in the pri-
ority queue OPEN, ordered by their costs (according
to sum of costs or makespan), and OPEN is initial-
ized with Root (line 4). Then, the high-level search
performs the following expansion cycle (lines 5-14).
CBS extracts the node N with the lowest cost from
OPEN (line 6) and performs a solution check. If Π(N)
is conflict-free, N is a solution, and its plan is returned
(lines 7-8). If Π(N) is not conflict-free, a conflict
a
i
, a
j
, x, t
in Π(N) is chosen to be resolved (line 9).
As both agents a
i
and a
j
cannot occupy x together at
timestep t, CBS generates two new nodes N
i
and N
j
(lines 10-11). When the new node N
′
is generated,
it sets constraints(N
′
) = constraints(N) ∪ {
⟨
a
′
, x, t
⟩
}
(line 15). Then, it calls the low-level solver to replan
for the constrained agent a
′
, and recomputes the up-
dated plan cost (lines 16-18). N
i
and N
j
are, therefore,
generated with the additional constraints
⟨
a
i
, x, t
⟩
and
a
j
, x, t
, respectively. If OPEN is empty, No Solution
is returned (line 13). Note that CBS can optimally
solve MAPF for either sum of costs or makespan
and the only modification for this purpose is ordering
OPEN according to the selected cost function.
In recent years, different improvements were de-
veloped for CBS, including prioritizing conflicts (Bo-
yarski et al., 2015), heuristics for CBS (Felner et al.,
2018), and symmetry-breaking (Li et al., 2019). We
do not discuss these here as they all aim to improve
CBS only to minimize the sum of costs. Including
these improvements would most likely affect the re-
sults in favour of sum of costs, however, we aim to
explore the behaviour of the base algorithm.
4 REDUCTION-BASED SOLVERS
Reduction-based approaches translate the input prob-
lems into another formalism, such as Boolean satis-
fiability (SAT) (Surynek, 2017), answer set program-
ming (ASP) (Nguyen et al., 2017), or integer linear
programming (ILP) (Yu and LaValle, 2012). We de-
scribe reductions to SAT and ASP. However, all of the
reduction procedures are based on the idea of creating
variables representing agents’ positions at a time.
Reduction to SAT. To model the positions and
transitions of the agents, variables At(t, a
i
, v) and
Pass(t, a
i
, (u, v)) are created, representing that at time
t, agent a
i
is located at vertex v, and that at time
t, agent a
i
is moving along edge (u, v), respectively.
Note that loop edges (v, v) for all v ∈ V are added to E
to model wait actions. Given some bound on the num-
ber of timesteps (i.e., the makespan) T , the following
constraints are created. Note that several different en-
codings exist in the literature (Zhou and Bart
´
ak, 2017;
Surynek, 2017; As’in Ach’a et al., 2021). For this pa-
per, we follow the one in (Bart
´
ak and Svancara, 2019).
∀a
i
∈ A : At(0, a
i
, s
i
) (1)
∀a
i
∈ A : At(T, a
i
, g
i
) (2)
∀0 ≤ t ≤ T, a
i
∈ A, u, v ∈ V, u ̸= v :
¬At(t, a
i
, u) ∨ ¬At(t, a
i
, v) (3)
∀0 ≤ t < T, u ∈ V, a
i
∈ A :
At(t, a
i
, u) =⇒
_
(u,v)∈E
Pass(t, a
i
, (u, v)) (4)
∀0 ≤ t < T, (u, v) ∈ E, a
i
∈ A :
Pass(t, a
i
, (u, v)) =⇒ At(t + 1, a
i
, v) (5)
∀0 ≤ t ≤ T, v ∈ V, a
i
, a
j
∈ A, a
i
̸= a
j
:
¬At(t, a
i
, v) ∨ ¬At(t, a
j
, v) (6)
∀0 ≤ t < T, (u, v) ∈ E, a
i
, a
j
∈ A, a
i
̸= a
j
:
¬Pass(t, a
i
, (u, v)) ∨ ¬Pass(t, a
j
, (v, u)) (7)
Constraints (1) – (7) ensure that the movement
of each agent is valid and that there are no conflicts
Which Objective Function is Solved Faster in Multi-Agent Pathfinding? It Depends
25

among the agents. Specifically, (1) and (2) ensure that
each agent starts and ends at s
i
and g
i
respectively. (3)
forbids an agent to be located at two vertices at the
same time. (4) states that if an agent is present at a
vertex, it leaves through one of the outgoing edges.
(5) ensures that if an agent is moving along an edge,
it arrives at the correct vertex at the next timestep. To-
gether, constraints (1) – (5) ensure that each agent
is moving along a path. To make sure there are no
conflicts among the paths, (6) forbids vertex conflicts,
while (7) forbids swapping conflicts.
As the plan length is unknown in advance, T is
iteratively increased until a solvable formula is pro-
duced. This produces a makespan optimal solution.
Two important enhancements are used. Let
dist(u, v) denote the shortest distance between ver-
tices u and v and let D
i
= dist(s
i
, g
i
) be the shortest
distance from the start to the goal of agent a
i
. The
initial T is then set as max
a
i
∈A
D
i
as it is clear that at
least this number of timesteps is needed to find a solu-
tion. Secondly, only variables representing reachable
positions are created. A variable At(t, a
i
, v) is created
only if dist(s
i
, v) ≤ t and dist(v, g
i
) < T − t, meaning
that there is enough time for a
i
to move from start s
i
to
vertex v and enough remaining time to move from v to
goal vertex g
i
. A variable Pass(t, a
i
, (u, v)) is created
only if both At(t, a
i
, u) and At(t + 1, a
i
, v) exist.
Changing the objective function is not as straight-
forward in the reduction-based approach as compared
to CBS. To model sum of costs, the same At(t, a
i
, v)
and Pass(t,a
i
, (u, v)) variables are created. As op-
posed to the makespan optimal version, we do not
create a global bound on timesteps T , but rather each
agent has their limit T
i
. The same constraints (1) – (7)
are used with a slight modification to (2) as follows:
∀a
i
∈ A : At(T
i
, a
i
, g
i
) (8)
To limit the sum of costs, a numerical constraint is
introduced stating that at most k extra actions may be
used (Surynek et al., 2016a). An extra action refers
to an action that is performed after the timestep D
i
by agent a
i
. We iteratively increase k and each T
i
by one until a solvable formula is created. Specifi-
cally, after δ iterations, the plan is allowed to contain
δ extra actions, however, since we do not know which
agent uses these actions, we increase all T
i
s so that any
agent can use them. It can be shown that this approach
yields a sum of costs optimal solution (Surynek et al.,
2016a), where the final cost is C
SOC
(Π) = k +
∑
D
i
.
We refer to this model as iterative.
An alternative approach to finding the appropri-
ate k has been proposed (Bart
´
ak and Svancara, 2019).
First, a makespan optimal solution Π
MKS
is found.
This solution has some (most likely suboptimal) sum
of costs value C
SOC
(Π
MKS
). It can be shown that set-
ting k = C
SOC
(Π
MKS
) −
∑
D
i
is sufficient to find the
sum of costs optimal solution. The optimal solution is
found by a branch-and-bound search on sum of costs
values (i.e. the number of extra actions) in the interval
[0,C
SOC
(Π) −
∑
D
i
]. We refer to this model as jump.
Similar enhancements as the ones used for
makespan optimization are used for both iterative and
jump models. The initial T
i
is set as D
i
and only vari-
ables representing a reachable position are created.
Furthermore, variables At(t, a
i
, g
j
) are not created for
a
i
∈ A, t ≥ D
j
+k to prevent any agent entering a goal
g
j
of agent a
j
after it finishes their plan.
4.1 Reduction to ASP
For the reduction to ASP, we use the encoding in List-
ing 1 to model bounded MAPF problems. In the fol-
lowing, we only give a high level description of the
rules used in this encoding; we refer the interested
reader to (Gebser et al., 2015) for a precise ASP se-
mantics.
1 #program sum _of _co s ts .
2 h or i zo n ( A ,H + D ) :- dist ( A ,H ) , d el ta (D).
3 #program ma k es pan .
4 h or i zo n ( A ,H ) : - agent ( A ) , mak esp an (H).
5 #program ma pf .
6 time ( A, 1 ..T) : - hor izo n ( A,T ) .
8 { mo ve ( A ,U, V, T ): e dg e ( U ,V ) , r ea ch ( A,V ,T )} 1
9 :- reac h ( A, U ,T - 1) .
10 at ( A, V,0 ) : - st art ( A, V ), ag en t ( A ).
11 at ( A, V,T ) : - mo ve ( A ,_ , V, T ) .
12 at ( A, V,T ) : - at ( A, V ,T - 1) , no t mo ve ( A,V ,_, T ) ,
13 ti me ( A,T ) .
14 :- move ( A,U ,_ ,T ) , n ot a t ( A, U,T -1 ).
15 :- a t ( A,V,T ) , not re ac h ( A ,V ,T ).
16 :- { at ( A,V ,T )} != 1 , t im e ( A,T ) .
18 :- { at ( A,V ,T )} > 1 , ve rte x ( V ), time ( _ ,T ).
19 :- move ( _,U ,V ,T ) , mo ve ( _ ,V ,U, T ) , U < V .
20 :- goal ( A ,V ) , no t a t ( A,V ,H ), ho riz on ( A ,H ) .
Listing 1: ASP encoding for bounded MAPF.
The encoding assumes as input a MAPF problem
given by predicates vertex, edge, agent, start, and
goal. The objective function is given by predicate
makespan for the makespan objective, and predicates
dist and delta for the sum of costs objective. Fi-
nally, predicate reach gives reachable vertices at time
points computed as described in the previous section.
The rules in lines 1–6 setup the required timesteps and
horizons for each agent as determined by the objec-
tive function. In lines 8–9, we generate a set of move
candidates only considering reachable vertices; there
can be up to one move per agent. Based on this predi-
cate, the agent locations are inferred by the following
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
26
three rules. The first establishes the initial positions
of agents, the next specifies the effects of moves, and
the last encodes inertia in case an agent is not moved.
The following three integrity constraints in lines 14–
16 prune invalid solution candidates. The first dis-
cards candidates having moves without an agent at
its source, the second discards candidates with agents
at unreachable positions, and the last ensures that an
agent has exactly one position at all time points. In
the last block of rules in lines 18–20, we ensure that
a solution corresponds to a plan. The first rule en-
sures that the solution has no vertex conflict, the sec-
ond that there is no swapping conflict, and the last one
that each agent reaches its goal vertex.
We implement the same approaches to compute
makespan and sum of costs optimal solutions (in-
cluding the iterative and jump variants) as described
above. To compute makespan optimal solutions, the
encoding can be used as is. However, for sum of costs,
additional rules are needed. The following three rules
are used to accumulate a penalty for each agent not
located at its goal vertex at a timestep:
pen al ty ( A,N ) :- dist ( A, N +1) , N >=0.
pen al ty ( A,T ) :- dist ( A, N ), at ( A,U ,T ),
not goal ( A ,U ) , T >= N .
pen al ty ( A,T ) :- pe nal ty ( A,T +1 ) , T >=0.
For the iterative approach, we then add the following
integrity constraints to ensure that a solution is indeed
sum of costs optimal:
bound ( H + D) : - H=#sum{ T ,A : dist ( A ,T )} , d elta (D ).
: - #sum{1 , A, T : p ena lt y ( A, T )} > B, bo und ( B ).
Finally, for the jump approach, we simply use ASP’s
inbuilt optimization facilities to minimize the accu-
mulated penalties:
#minimize{1 ,A,T : pe n al ty ( A, T ) }.
5 EXPERIMENTS
Instance Setup. To test and evaluate the behav-
ior of the search-based algorithm CBS and the two
reduction-based algorithms w.r.t. both described cost
functions, we created a set of experiments inspired
by the commonly used benchmark set (Stern et al.,
2019). We created a variety of 4-connected grid maps
with different obstacle structures and with increasing
size. There are two types of maps with regards to the
obstacle placement – empty, i.e. there are no obstacles
placed, and random, i.e., 20% of randomly selected
vertices are marked as impassable obstacles. The size
of the maps starts with grids of size 8 by 8 and in-
creases by 8 (i.e., 8 by 8, 16 by 16, 24 by 24, etc.)
Table 1: The number of solved instances. The results are
split based on the used cost function and based on the size
of the instance grid graph. For each solver and map size,
the most number of solved instances is highlighted.
CBS SAT ASP
mks soc mks
soc
iter
soc
jump
mks
soc
iter
soc
jump
8 196 171 461 218 194 457 243 241
16 362 270 1526 445 230 1660 461 359
24 373 313 1433 505 197 2088 572 415
32 323 375 873 564 114 1292 645 448
40 310 441 470 677 80 666 721 411
48 263 473 321 543 77 398 671 292
56 299 524 241 559 41 297 670 235
64 293 510 149 580 33 134 645 122
total 2419 3077 5474 4091 966 6992 4628 2523
until 64 by 64. As we show below, the increase in
size has a high impact on the performance of the al-
gorithms, for this reason, we created our own maps
with a finer increment as opposed to using already ex-
isting instances from the benchmark set, which does
not contain such a set of maps.
For each map, we created 5 scenario files, result-
ing in 80 scenarios in total. Each scenario file con-
tains different start and goal locations of agents. The
intended use is to create an instance with one agent
from the scenario, and if solvable in the given time
limit, add further agents creating new instances. This
process is repeated until the solver is unable to solve
an instance with the given number of agents in the
given time limit. The time limit is set to 60 seconds
per instance. The number of agents in each scenario
file was chosen so that no solver was able to solve all
of the agents, with the exception of the 8 by 8 maps
which include only 50 agents. We mention this below
when relevant while describing the results.
The tests were performed on a desktop com-
puter with Intel® Core™ i5-6600 CPU @ 3.30GHz
× 4 and 16GB of RAM. We used an implementa-
tion of CBS from (Boyarski et al., 2015), for the
“at most K” constraint we used PBLib (Philipp and
Steinke, 2015), the underlying SAT solver used is
Kissat (Biere et al., 2020), the underlying ASP solver
used is Clingo (Kaminski et al., 2020). All source
codes and results are available online – https://github.
com/svancaj/mks vs soc.
Results. Table 1The number of solved instances.
The results are split based on the used cost function
and based on the size of the instance grid graph. For
each solver and map size, the most number of solved
instances is highlighted. shows the number of solved
instances each solver was able to solve within the time
limit. The results are split based on the solver used,
the optimized cost function (in case of reduction to
Which Objective Function is Solved Faster in Multi-Agent Pathfinding? It Depends
27

SAT and ASP, we present both of the described ap-
proaches for solving the sum of costs optimization),
and the size of the input instance map. We do not split
the results based on the obstacle structure as this does
not provide any significant insights. We observed that
the results for empty and random maps are similar.
Based on the presented numbers, we see that for
the smaller maps (8 by 8 through 24 by 24), both
of the approaches were more successful using the
makespan optimization, while for the larger maps (40
by 40 and larger) the advantage heavily shifts to op-
timizing the sum of costs. The turning points are the
maps of size 32 by 32 for CBS and 40 by 40 for the
reduction-based solvers.
The jumping model was always outperformed by
the iterative model for both reductions, ASP and SAT.
The results were close only for maps of size 8 by 8.
As we already stated, the aim of this paper is
not to compare the algorithms against each other as
the performance may be affected by our implemen-
tation. Nevertheless, we can see that for the smaller
maps, the reduction-based approaches solve signifi-
cantly more instances compared to CBS, especially
under the makespan objective. On the other hand, as
the size of the maps increases (from 40 by 40 onward)
the number of instances solved by the reduction-based
approaches decreases, while the number of instances
solved by CBS tends to increase under the sum of
costs optimization. The phenomenon that reduction-
based solvers struggle with large instances is explored
by other studies (Hus
´
ar et al., 2022), even though they
explore only the makespan optimization. The ten-
dency of CBS is intuitive: as there are fewer chances
for collision on large maps, fewer conflicts need to
be resolved and, thus, a smaller CT is created. But,
again, this is explored only for the sum of costs opti-
mization in the literature (Sharon et al., 2015).
We compare our results to the results presented
in a previous works focusing on empirical evalu-
ation of the sum of costs and makespan optimal
solvers (Surynek et al., 2016b). In the paper, one
of the main conclusions is that “results show that
the makespan optimal variant tends to be easier (ex-
cept for the EPEA* solver), all the other solvers are
faster in their makespan optimal configuration.” The
experimental evaluation used grid maps of sizes 16
by 16 and a smaller set of experiments on maps of
size 6 by 6 and a 4-dimensional hypercube (such a
hypercube has 16 vertices). We see that on these
smaller maps, our results are comparable. However,
as we show above, we can extend these results and
observe a switch in performance as the maps’ size in-
creases. Similarly, a work focusing on ASP encodings
for MAPF (G
´
omez et al., 2021) concludes that “ASP-
makespan scales substantially better than ASP-cost”.
Again, the experiments are performed only on small
grid maps of size 20 by 20.
6 DISCUSSION
Search-Based CBS. As mentioned above, CBS
mainly performed better for minimizing sum of costs
than for minimizing makespan, except for tiny maps.
Here, we try to explain this phenomenon.
Let Π
SOC
and Π
MSK
denote the optimal solutions
for minimizing the sum of costs and makespan, re-
spectively, and C
SOC
(Π) and C
MSK
(Π) denote the sum
of costs and makespan of a given plan Π, respec-
tively. Clearly, C
SOC
(Π
SOC
) ≤ C
SOC
(Π
MSK
). Accord-
ing to (Boyarski et al., 2021), when a conflict is re-
solved, the sum of costs of the child node may in-
crease by one relative to the sum of costs of its par-
ent node. Conflicts that increase the sum of costs
in both child nodes are known as cardinal conflicts,
conflicts that increase the sum of costs in only one
child node are known as semi-cardinal conflicts, and
other conflicts are called non-cardinal conflicts (Bo-
yarski et al., 2015).
1
Therefore, any plan Π
′
can only
be found in the CT at a depth greater than or equal
to ∆
Π
′
= C
SOC
(Π
′
) − C
SOC
(Π(Root)). ∆
Π
′
can be
seen as a lower bound on the depth of the closest CT
node in the CT that contains plan Π
′
. As mentioned
above, C
SOC
(Π
SOC
) ≤ C
SOC
(Π
MSK
). By subtracting
C
SOC
(Π(Root)) from each side of the inequality, we
get ∆
Π
SOC
≤ ∆
Π
MSK
, i.e, the lower bound on the depth
of the optimal SOC solution is lower than or equal to
the one of the optimal makespan solution. Thus, it
may be found faster with fewer node expansions.
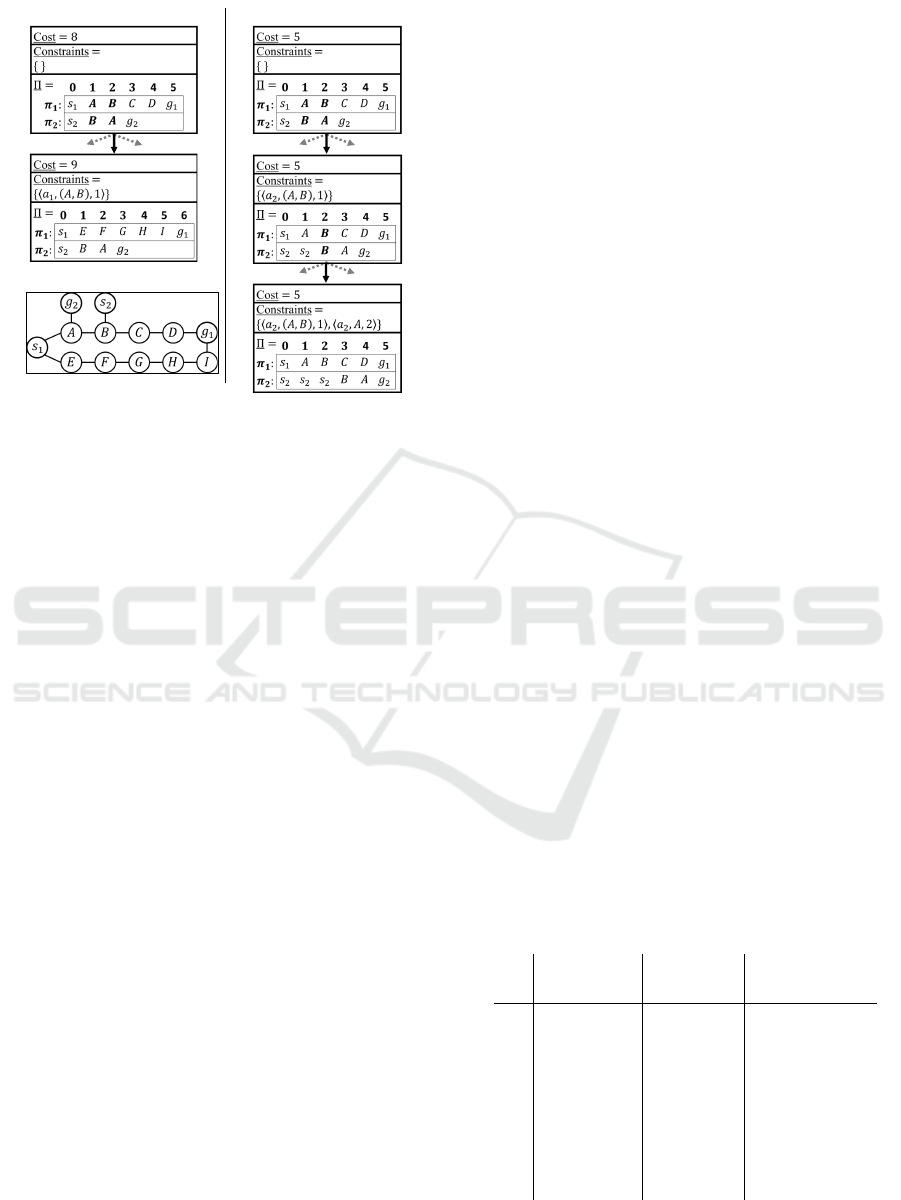
Figure 2CBS’s CTs for SOC (left) and MKS
(right). presents partial CTs for minimizing sum
of costs (left) and makespan (right) created when
CBS is executed on the problem instance shown
in Figure 1Example of SOC and MKS optimal
solutions.. The figure only presents the short-
est branches of the CTs leading to optimal solu-
tions. Here, C
SOC
(Root) = 8, C
SOC
(Π
SOC
) = 9, and
C
SOC
(Π
MSK
) = 10. Thus, ∆
Π
SOC
= 1 and ∆
Π
MSK
= 2,
corresponding to the depths of the optimal solutions.
While the lower bound on the depth of the op-
timal sum of costs is lower than that of the optimal
makespan, it may not always be the case that the op-
timal makespan solution is deeper in the CT than the
optimal sum of costs solution; it depends on the paths
the low-level solver returns, e.g., the low-level solver
1
It is shown (Boyarski et al., 2015) that resolving
conflicts in this order (cardinal, semi-cardinal, and non-
cardinal) often results in fewer CT node expansions.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
28
SOC
Makespan
Figure 1
Figure 2: CBS’s CTs for SOC (left) and MKS (right).
may return conflicting paths with non-cardinal con-
flicts. Then the depth of the optimal solution may be
higher. Moreover, for CBS, some problem instances
are easier for sum of costs and some for makespan.
Figure 3Example of problem instances where
CBS performs better for SOC (left) and MKS (right).
presents two problem instances and their correspond-
ing CTs, where each CT node shows the sum of costs
and makespan of its plan. On the left instance, after
the conflict of the root is resolved, the sum of costs
and makespan increase in the left child CT node, and
only the sum of costs increases in the right one. As
the left node contains a conflict-free plan and the sum
of costs is equal for both nodes, an optimal sum of
costs solution is found, and the search can stop. How-
ever, to find the optimal makespan solution, the right
node must be explored, as the makespan of that node
is lower. On the right instance, after the conflict of
the root is resolved, only the sum of costs in the left
CT node increases. Here, the optimal makespan solu-
tion is found in the left node, as both nodes have the
same makespan. However, to find the optimal SOC
solution, the right node must be explored. Therefore,
the left instance is easier for finding the optimal sum
of costs solution and the right one is easier for finding
the optimal makespan solution.
While there are instances easier for either sum of
costs or for makespan, CBS still often performs bet-
ter for sum of costs. When resolving a conflict in
CBS, the sum of costs and makespan in the two child
CT nodes may either remain the same as their par-
ent or increase. Increasing the cost in the child nodes
usually reduces the size of the CT, as one of these
branches may not be explored, e.g., if the cost exceeds
the cost of the optimal solution. When the makespan
increases, the sum of costs always also increases, e.g.,
the left node of the left instance in Figure 3Example
of problem instances where CBS performs better for
SOC (left) and MKS (right).. However, when the sum
of costs increases, the makespan may not always in-
crease as well, e.g., the left node of the right instance.
Therefore, we conjecture that this also gives an ad-
vantage to sum of costs in CBS.
In the tiny maps (form size 8 by 8 to 24 by 24),
CBS performed slightly better for makespan than for
sum of costs. We conjecture that the reason is that
such maps are more crowded, the paths of the agents
are relatively short, and there is more than a single
agent influencing the makespan, i.e., multiple agents
have the longest path. Therefore, the makespan in-
creases more often in these maps when CBS resolves
a conflict between two agents.
Reduction to SAT. Both makespan and the sum of
costs optimizations pose specific challenges, which
we explain using the average number of variables in
instances solved by both the makespan optimal model
and iterative sum of costs optimal model shown in
Table 2Average number of variables (in thousands)
entering the SAT solver using the makespan optimal
model and the iterative sum of costs optimal model.
From left to right, the number of variables of the
last call, the number of times the SAT solver was in-
voked, and the cumulative number of variables across
all solver calls are listed.. Of course, other factors that
are hard to measure may play a role in performance in
the case of reduction-based solving, however, as we
show, the number of variables may provide an expla-
nation.
Table 2: Average number of variables (in thousands) enter-
ing the SAT solver using the makespan optimal model and
the iterative sum of costs optimal model. From left to right,
the number of variables of the last call, the number of times
the SAT solver was invoked, and the cumulative number of
variables across all solver calls are listed.
vars last call solver calls vars cumulative
mks soc mks soc mks soc
8 6 12 1,0 5,4 6 158
16 140 76 1,0 5,8 140 748
24 454 127 1,0 5,0 454 1269
32 1439 144 1,0 4,2 1439 1143
40 1685 130 1,0 4,5 1685 1183
48 1498 67 1,0 2,7 1498 451
56 1475 60 1,0 2,7 1475 382
64 1239 18 1,0 1,8 1239 53
The number of variables modeling the movement
Which Objective Function is Solved Faster in Multi-Agent Pathfinding? It Depends
29
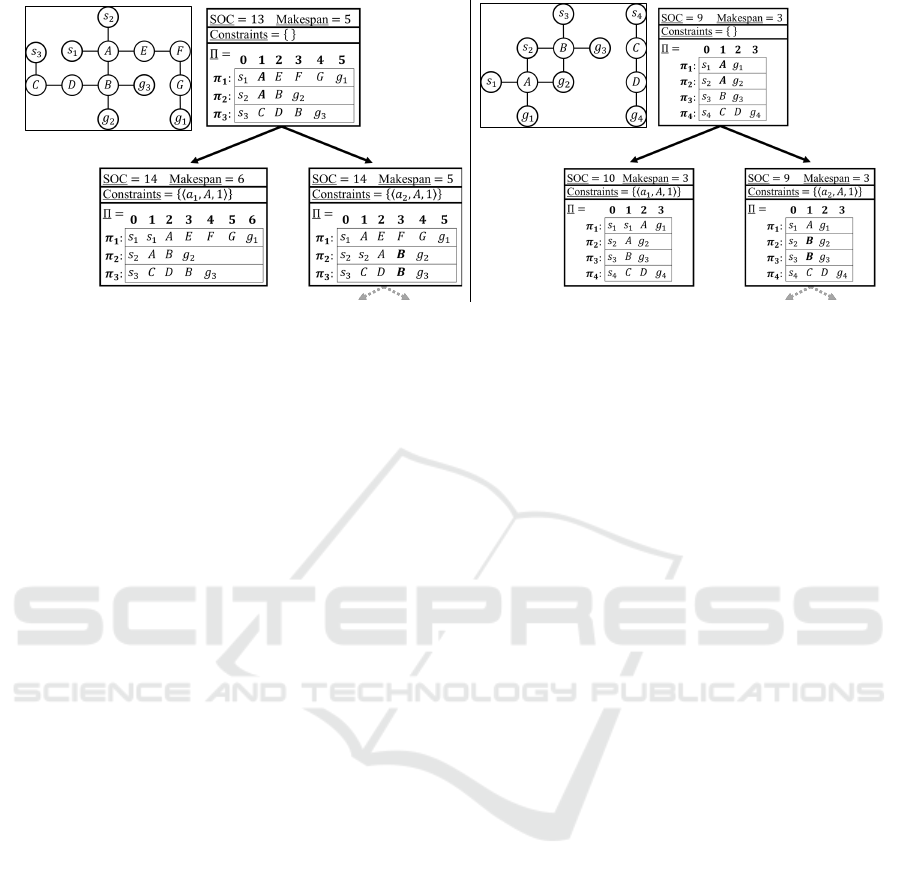
Figure 3: Example of problem instances where CBS performs better for SOC (left) and MKS (right).
of the agents depends on the number of agents |A|,
number of vertices |V |, and number of timesteps T .
Increasing |V | (i.e., increasing map size) increases
also T as the start and goal placement is random, it
is more likely that the start-goal distance is greater. In
the makespan optimization, there is a global time limit
T for all agents. This means that if the start-goal dis-
tance of agent a
i
is much lower than T , a
i
has enough
time and freedom to move around the map. For this
movement, variables have to be created and the un-
derlying solver has to assign them in compliance with
the constraints. These variables may be unnecessary
for finding the solution, however, to ensure that the
found solution is optimal, they have to be included.
The increase in the number of variables with the size
of the map can be seen in Table 2Average number of
variables (in thousands) entering the SAT solver using
the makespan optimal model and the iterative sum of
costs optimal model. From left to right, the number
of variables of the last call, the number of times the
SAT solver was invoked, and the cumulative number
of variables across all solver calls are listed.. The fact
that the number of variables decreases for map sizes
40 by 40 and onward is caused by both solvers not
being able to solve instances with a high number of
agents. On the other hand, as T is usually dictated
by a single agent with a large start-goal distance, T
is rarely increased as all conflicts are solved without
disturbing the critical agent. Again, this can be seen
in Table 2Average number of variables (in thousands)
entering the SAT solver using the makespan optimal
model and the iterative sum of costs optimal model.
From left to right, the number of variables of the
last call, the number of times the SAT solver was in-
voked, and the cumulative number of variables across
all solver calls are listed. in the number of solver calls,
which indicates how many times the bound on the cost
was increased.
In the sum of costs optimization, each agent has
a separate time limit T
i
. This means that the move-
ment of the agents is much more restricted and the
number of variables is lowered. On the other hand,
a numeric constraint “at most K” is introduced which
causes an overhead in terms of the number of vari-
ables. Table 2Average number of variables (in thou-
sands) entering the SAT solver using the makespan
optimal model and the iterative sum of costs optimal
model. From left to right, the number of variables
of the last call, the number of times the SAT solver
was invoked, and the cumulative number of variables
across all solver calls are listed. shows that the over-
head over the makespan model is most prominent in
the smallest maps. As the size of the map increases,
the makespan model overtakes the sum of costs model
due to the behavior explained above. Since the sum
of costs model poses a larger restriction on the move-
ment, the collisions among agents must be often re-
solved by increasing the cost function, meaning a new
call to the underlying solver (shown in Table 2Aver-
age number of variables (in thousands) entering the
SAT solver using the makespan optimal model and
the iterative sum of costs optimal model. From left
to right, the number of variables of the last call, the
number of times the SAT solver was invoked, and the
cumulative number of variables across all solver calls
are listed.). Since there are multiple solver calls, we
also present a cumulative number of variables across
all of the calls. These numbers more closely corre-
spond to the results in Table 1The number of solved
instances. The results are split based on the used cost
function and based on the size of the instance grid
graph. For each solver and map size, the most num-
ber of solved instances is highlighted.. Again, the fact
that the number of variables decreases for map sizes
40 by 40 and onward is caused by both solvers not
being able to solve instances with many agents.
Our results in Table 1The number of solved in-
stances. The results are split based on the used cost
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
30

function and based on the size of the instance grid
graph. For each solver and map size, the most number
of solved instances is highlighted. also provide an in-
sight into the two different sum of costs optimal mod-
els – iterative and jump. In (Bart
´
ak and Svancara,
2019), the latter showed to outperform the former.
In our experiments, the iterative model always per-
formed better. The experiments in the original pub-
lication of the jump model were performed only on
small instances of sizes 8 by 8 up to 16 by 16, where
the model also performed the best in our experiments.
On these maps, the model can indeed outperform the
iterative model with improved implementation. As
stated, our implementation consists of hand-crafted
translation to SAT, while in the original paper, Picat
language is used (Zhou et al., 2015) to automatically
translate constraints to SAT and to minimize the sum
of costs. We suspect that the built-in libraries for min-
imization perform better than rebuilding the formula
from scratch with a different bound on the sum of
costs.
The jump model behaves differently as compared
to the iterative one. The number of solved instances
tend to decrease with the increase in map size for the
jump model, while the iterative model has a peak at
size 40 by 40. This is to be expected since the first
step of the jump model is to find the makespan optimal
solution and we showed that for the larger maps, it is
harder to find the makespan optimal solution than the
sum of costs optimal solution. On the other hand, the
numerical constraints are still present and, as shown,
introduce a significant overhead for the smaller maps.
In a sense, the jump model combines the hardest parts
of both optimizations.
On the other hand, the jump model performs fewer
solver calls to find the appropriate k. The model may
be improved by finding a suboptimal solution first (in-
stead of a makespan optimal one) to set the k.
Reduction to ASP. The results for the reduction to
ASP are similar to the ones for SAT. In Table 3Av-
erage number of variables, solve calls, and reachable
positions per instance for each cost function. Num-
bers for variables and positions are in thousands and
the number of variables is accumulated over all solve
calls., we see that the cumulative number of Boolean
variables follows a similar trend to that of SAT. How-
ever, the numbers are not directly comparable be-
cause they depend on the number of solved instances
and the ASP-based reduction solves slightly more in-
stances. The table also reports the number of reach-
able positions. We observe that this number is propor-
tional to the number of variables, which is to be ex-
pected because they directly influence the size of the
ground instances (the internal representation of the
encoding, closely related to a SAT formula, the solver
is working on). We observe that for the makespan ob-
jective, reachable positions increase for larger maps
but there is a drop for the largest maps. This can be
explained by the smaller number of instances solved
for larger maps; we can only solve for a low number
of agents. This behavior is even more pronounced for
the sum of costs objective. Furthermore, we observe
that there is a much higher number of solve calls for
smaller instances in this setting. This shows that we
can solve instances with more agents here. For larger
maps, the number of solve calls drops due to time-
outs coupled with a decrease in reachable positions.
This shows that the reachability optimization is espe-
cially effective for the sum of costs objective where
the shortest distances between start and goal vertices
are taken into account for each agent as opposed to
the makespan objective where all agents move within
the same fixed horizon. Hence, we observe a much
smaller number of reachable positions and a larger
number of solved instances for the sum of costs ob-
jective as compared to the makespan objective.
Table 1The number of solved instances. The re-
sults are split based on the used cost function and
based on the size of the instance grid graph. For each
solver and map size, the most number of solved in-
stances is highlighted. shows that the jump model for
ASP performs worse than the iterative model. As dis-
cussed in the previous section, this can be improved
by changing the way the initial plan is computed. Fur-
thermore, we used the default configuration of the
ASP solver in the benchmarks. We suspect that the
jump model would be faster than the iterative model
(at least for the smaller instances) if an alternative al-
gorithm for optimization is chosen, such as optimiza-
tion based on unsatisfiable cores (Andres et al., 2012).
Finally, we comment on the difference in the num-
ber of solved instances between the SAT- and ASP-
based reductions. The instantiation of rules in the
ASP encoding is linear in the number of agents, while
for the reduction to SAT, the number of clauses for
conflicts is quadratic in the number of agents. Reduc-
ing the number of rule instances/clauses often has a
big impact on solving. We note that further size re-
ductions for the SAT model are possible as well.
7 CONCLUSION
We compared the behavior of the search-based al-
gorithm CBS and the reduction-based approaches
while optimizing MAPF under two cost functions –
makespan and sum of costs. We empirically showed
Which Objective Function is Solved Faster in Multi-Agent Pathfinding? It Depends
31

Table 3: Average number of variables, solve calls, and
reachable positions per instance for each cost function.
Numbers for variables and positions are in thousands and
the number of variables is accumulated over all solve calls.
vars cumulative solver calls reach pos
mks soc mks soc mks soc
8 12 264 1,0 7,0 2 67
16 189 436 1,0 5,3 28 119
24 692 699 1,0 5,1 102 196
32 2336 447 1,0 3,4 342 111
40 2900 273 1,0 2,7 426 60
48 2815 91 1,0 1,8 424 14
56 2646 180 1,0 2,3 396 37
64 1488 12 1,0 1,1 216 0,5
that on small-size maps, it is easier for both ap-
proaches to solve the makespan optimization, while
on larger maps, it is easier to solve the sum of costs
optimization. This is counter-intuitive since both of
the solving approaches were first conceived for differ-
ent cost functions – search-based for the sum of costs
and reduction-based for makespan.
We provided insights into the phenomenon. For
CBS, the lower depth of the optimal makespan so-
lution is larger than or equal to that of the optimal
sum of costs solution, which may require more node
expansions when minimizing makespan. Moreover,
when the makespan increases at a child node due to
conflict resolution, the sum of costs also increases, but
not vice versa. Increasing that cost often reduces the
size of the CBS tree. Therefore, this also gives an ad-
vantage to the sum of costs. For the reduction-based
approaches, solving for sum of costs introduces over-
head for the numerical constraints. This overhead is
outweighed on larger maps by the freedom of move-
ment of the agents with less restricted paths. This
freedom is modeled by a large number of variables
that overwhelm the underlying solver.
We also compared our results with three previous
studies (Surynek et al., 2016b; Bart
´
ak and Svancara,
2019; G
´
omez et al., 2021) and showed that our results
are different from theirs due to the small-scale experi-
ments they used. On smaller maps, we observed sim-
ilar behavior as was reported in the studies, however,
on larger maps, the behavior diverged.
Based on our work, we propose open questions for
future work. The CBS algorithm may be improved for
makespan. When finding a new single-agent path, this
path does not have to be the shortest possible, if the
makespan is dictated by a path of a different agent.
This may reduce the number of future conflicts.
Furthermore, the jumping model may be improved
by changing the approach to finding the initial solu-
tion, as finding a makespan optimal solution first and
then creating the numerical constraints combines the
hardest parts of both cost functions.
ACKNOWLEDGEMENTS
This work was funded by DFG grant SCHA 550/15,
by project 23-05104S of the Czech Science Founda-
tion, and by Charles University project 24/SCI/008.
REFERENCES
Alonso-Mora, J., Breitenmoser, A., Rufli, M., Beardsley,
P. A., and Siegwart, R. (2010). Optimal reciprocal col-
lision avoidance for multiple non-holonomic robots.
In DARS, pages 203–216.
Andres, B., Kaufmann, B., Matheis, O., and Schaub, T.
(2012). Unsatisfiability-based optimization in clasp.
In ICLP, pages 211–221.
As’in Ach’a, R. J., L
´
opez, R., Hagedorn, S., and Baier, J. A.
(2021). A new boolean encoding for MAPF and its
performance with ASP and maxsat solvers. In SoCS,
pages 11–19.
Bart
´
ak, R. and Svancara, J. (2019). On sat-based ap-
proaches for multi-agent path finding with the sum-
of-costs objective. In SoCS, pages 10–17.
Bennewitz, M., Burgard, W., and Thrun, S. (2002). Find-
ing and optimizing solvable priority schemes for de-
coupled path planning techniques for teams of mobile
robots. Robotics Auton. Syst., 41(2-3):89–99.
Biere, A., Fazekas, K., Fleury, M., and Heisinger, M.
(2020). CaDiCaL, Kissat, Paracooba, Plingeling and
Treengeling entering the SAT Competition 2020. In
Proceedings of the SAT Competition 2020 – Solver
and Benchmark Descriptions, pages 51–53.
Boyarski, E., Felner, A., Bodic, P. L., Harabor, D. D.,
Stuckey, P. J., and Koenig, S. (2021). f-aware conflict
prioritization & improved heuristics for conflict-based
search. In AAAI, pages 12241–12248.
Boyarski, E., Felner, A., Stern, R., Sharon, G., Tolpin,
D., Betzalel, O., and Shimony, S. E. (2015). ICBS:
improved conflict-based search algorithm for multi-
agent pathfinding. In IJCAI, pages 740–746.
Dresner, K. M. and Stone, P. (2008). A multiagent
approach to autonomous intersection management.
JAIR, 31:591–656.
Felner, A., Li, J., Boyarski, E., Ma, H., Cohen, L., Kumar,
T. K. S., and Koenig, S. (2018). Adding heuristics to
conflict-based search for multi-agent path finding. In
ICAPS, pages 83–87.
Gebser, M., Harrison, A., Kaminski, R., Lifschitz, V., and
Schaub, T. (2015). Abstract Gringo. Theory and Prac-
tice of Logic Programming, 15(4-5):449–463.
G
´
omez, R. N., Hern
´
andez, C., and Baier, J. A. (2021). A
compact answer set programming encoding of multi-
agent pathfinding. IEEE Access, 9:26886–26901.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
32

Hart, P., Nilsson, N. J., and Raphael, B. (1968). A formal
basis for the heuristic determination of minimum cost
paths. IEEE Transactions on Systems Science and Cy-
bernetics, 4:100–107.
Hus
´
ar, M., Svancara, J., Obermeier, P., Bart
´
ak, R., and
Schaub, T. (2022). Reduction-based solving of multi-
agent pathfinding on large maps using graph pruning.
In AAMAS, pages 624–632.
Kaminski, R., Romero, J., Schaub, T., and Wanko, P.
(2020). How to build your own asp-based system?!
CoRR, abs/2008.06692.
Li, J., Felner, A., Boyarski, E., Ma, H., and Koenig, S.
(2019). Improved heuristics for multi-agent path find-
ing with conflict-based search. In IJCAI, pages 442–
449.
Ma, H., Li, J., Kumar, T., and Koenig, S. (2017). Lifelong
multi-agent path finding for online pickup and deliv-
ery tasks. In AAMAS, pages 837–845.
Nguyen, V., Obermeier, P., Son, T. C., Schaub, T., and
Yeoh, W. (2017). Generalized target assignment and
path finding using answer set programming. In IJCAI,
pages 1216–1223.
Philipp, T. and Steinke, P. (2015). Pblib – a library for en-
coding pseudo-boolean constraints into cnf. In Theory
and Applications of Satisfiability Testing – SAT 2015,
volume 9340 of Lecture Notes in Computer Science,
pages 9–16. Springer International Publishing.
Sartoretti, G., Kerr, J., Shi, Y., Wagner, G., Kumar, T.
K. S., Koenig, S., and Choset, H. (2019). PRI-
MAL: pathfinding via reinforcement and imitation
multi-agent learning. IEEE Robotics Autom. Lett.,
4(3):2378–2385.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-based search for optimal multi-agent
pathfinding. Artificial Intelligence, 219:40–66.
Silver, D. (2005). Cooperative pathfinding. In AIIDE, pages
117–122.
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H.,
Walker, T. T., Li, J., Atzmon, D., Cohen, L., Kumar,
T. K. S., Bart
´
ak, R., and Boyarski, E. (2019). Multi-
agent pathfinding: Definitions, variants, and bench-
marks. In SoCS, pages 151–159.
Surynek, P. (2010). An optimization variant of multi-robot
path planning is intractable. In AAAI, pages 1261–
1263.
Surynek, P. (2012). A sat-based approach to cooperative
path-finding using all-different constraints. In SoCS.
Surynek, P. (2017). Time-expanded graph-based proposi-
tional encodings for makespan-optimal solving of co-
operative path finding problems. Ann. Math. Artif. In-
tell., 81(3-4):329–375.
Surynek, P., Felner, A., Stern, R., and Boyarski, E. (2016a).
Efficient SAT approach to multi-agent path finding un-
der the sum of costs objective. In ECAI, pages 810–
818.
Surynek, P., Felner, A., Stern, R., and Boyarski, E. (2016b).
An empirical comparison of the hardness of multi-
agent path finding under the makespan and the sum
of costs objectives. In SoCS, pages 145–147.
Yu, J. and LaValle, S. M. (2012). Multi-agent path planning
and network flow. In WAFR, pages 157–173.
Yu, J. and LaValle, S. M. (2013). Structure and intractability
of optimal multi-robot path planning on graphs. In
AAAI, pages 1444–1449.
Zhou, N. and Bart
´
ak, R. (2017). Efficient declarative solu-
tions in picat for optimal multi-agent pathfinding. In
ICLP, pages 11:1–11:2.
Zhou, N., Kjellerstrand, H., and Fruhman, J. (2015). Con-
straint Solving and Planning with Picat. Springer
Briefs in Intelligent Systems. Springer.
Which Objective Function is Solved Faster in Multi-Agent Pathfinding? It Depends
33
