
Multiverse: A Deep Learning 4X4 Sudoku Solver
Chaim Schendowich
1
, Eyal Ben Isaac
2
and Rina Azoulay
1
1
Dept. Computer Sciences, Lev Academic Center, Jerusalem, Israel
2
Dept. Data Mining, Lev Academic Center, Jerusalem, Israel
Keywords:
Sudoku, Deep Learning, One-Shot Prediction, Sequence Completion.
Abstract:
This paper presents a novel deep learning-based approach to solving 4x4 Sudoku puzzles, by viewing Su-
doku as a complex multi-level sequence completion problem. It introduces a neural network model, termed as
”Multiverse”, which comprises multiple parallel computational units, or ”verses”. Each unit is designed for
sequence completion based on Long Short-Term Memory (LSTM) modules. The paper’s novel perspective
views Sudoku as a sequence completion task rather than a pure constraint satisfaction problem. The study
generated its own dataset for 4x4 Sudoku puzzles and proposed variants of the Multiverse model for compar-
ison and validation purposes. Comparative analysis shows that the proposed model is competitive with, and
potentially superior to, state-of-the-art models. Notably, the proposed model was able to solve the puzzles
in a single prediction, which offers promising avenues for further research on larger, more complex Sudoku
puzzles.
1 INTRODUCTION
In this paper we propose a deep learning model for
solution of 4X4 Sudoku puzzles and show that the
model can solve over 99 percent of the puzzles pro-
vided to it in just a single prediction while state-of-
the-art systems needed more prediction iterations to
attain similar results.
The Sudoku puzzle was first introduced in the
1970s in a Dell magazine. It became fairly known
throughout Japan. In the early 2000s, the puzzle
started becoming extremely popular in Europe and
then in the United States, igniting an interest not only
in the form of competitions but also in the form of
scientific research (see (Hayes, 2006) for a detailed
background). The popularity of the puzzle caused a
lot of research to be done regarding its logic-based
properties and the diverse methods for solving it.
The Sudoku puzzle is composed of a square of
cells with o
2
rows and o
2
columns for some natural
constant o called the order of the puzzle. The square
is subdivided into its o
2
primary o × o squares called
boxes or sub-squares. The boxes divide the rows and
columns into o sets of rows and o sets of columns
called row groups and column groups respectively.
The puzzle begins with some placement of values
1· · · o
2
in some of the cells called givens or hints. The
object of the puzzle is to fill the rest of the cells with
(a) Boxes. (b) Row Groups. (c) Column Groups.
Figure 1: Depiction of the Sudoku variables.
values so that every row, column, and sub-square will
have all the values from 1 · · · o
2
. A block is either a
row, a column or a sub-square interchangeably.
Sudoku is considered a logic based puzzle. In fact,
there are many types of logic that must be combined
to solve the hardest of puzzles, ranging from trial and
error to deduction and from inference to elimination.
A Sudoku can, technically, have more than one
correct solution. A Well Posed Sudoku is a puzzle that
has only one correct solution. A puzzle can be easier
to solve if there are redundant hints, namely givens
that can be deduced from one or more other givens. A
puzzle with no redundant hints is called Locally Min-
imal (Simonis, 2005). Figures 2 and 3 demonstrate
examples of the types of puzzles and their solutions.
The puzzle in Fig. 2a is locally minimal because re-
moving any of the numbers will cause it to have more
than one solution thus no longer being well posed. For
example, removing the 2 will cause Fig. 3b to be a
valid solution as well; removing the 1 will make Fig.
Schendowich, C., Ben Isaac, E. and Azoulay, R.
Multiverse: A Deep Learning 4X4 Sudoku Solver.
DOI: 10.5220/0012232500003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 15-22
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
15
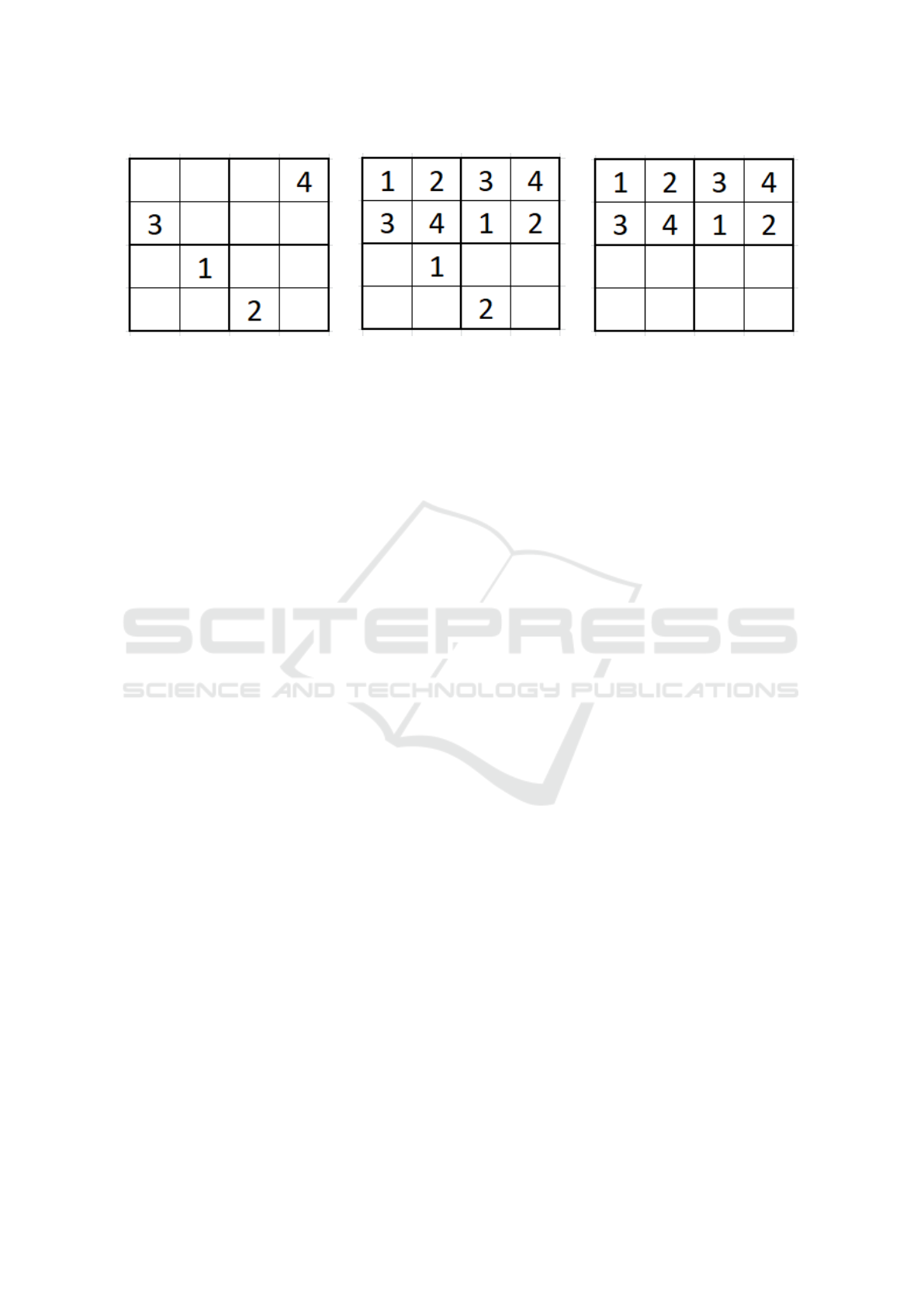
(a) Well posed, locally minimal. (b) Only well posed. (c) Not well posed (4 solutions).
Figure 2: Examples for well posed and locally minimal puzzles.
3d be a valid solution, and so on.
Sudoku can further be classified as a discrete con-
straint satisfaction problem (CSP). In particular, Su-
doku is a special case of CSPs called an exact cover
problem, where each constraint must be satisfied by
only one variable in the solution assignment. Any al-
gorithm that can solve discrete CSPs or exact cover
problems will be able to provide a solution for a Su-
doku, albeit usually in exponential run-time.
Sudoku can also be approached as a Machine
Learning problem, thus described as a multi-class
multi-label classification problem, meaning that a
given puzzle has multiple values that need to be deter-
mined (namely the values of the unassigned cells) and
each of those is one discrete value of a shared domain
of integers. Therefore, there are various machine
learning and deep learning methods that might be ap-
plicable to it. Unfortunately, a very high level of gen-
eralization is required for learning the implicit con-
nections between the cells so simple methods are not
good enough here (Palm et al., 2018). Some progress
has been made in this avenue of research, particularly
combining deep learning with other methods (Wang
et al., 2019) or using networks with recurrent predic-
tion steps (Palm et al., 2018; Yang et al., 2023).
In this study, we introduce a novel approach to
tackle Sudoku solving by leveraging a neural network
architecture. Our methodology is rooted in the notion
that Sudoku puzzles share similarities with intricate
sequential data completion problems. To address this,
we devised a specialized sequential completion unit
based on Long Short-Term Memory (LSTM) and in-
terconnected multiple such units in a parallel fashion.
Remarkably, our resultant model exhibits comparable
competence to state-of-the-art models, while obviat-
ing the need for multiple prediction iterations. No-
tably, we demonstrate a substantial disparity between
our model and existing approaches in terms of perfor-
mance when such iterations are excluded.
Drawing upon the notion that Sudoku represents a
complex sequential data completion task, we adopted
bespoke deep learning techniques to tackle its solu-
tion. Recognizing that the puzzle’s completion pro-
cess entails a multi-dimensional sequence, our pro-
posed model incorporates multiple parallel computa-
tional units. For the sake of simplicity, our investiga-
tion primarily focuses on training the model on 4x4
puzzles that exhibit local minimality. Through one-
shot prediction, we achieved an impressive comple-
tion rate exceeding 99 percent, effectively showcas-
ing the neural network’s capacity to grasp the abstract
relationships among the puzzle’s cells.
To the best of our knowledge, even though Large
Language Models (LLMs) have been used for Sudoku
solving, there has not been previous research based on
the premise that Sudoku is a sequential completion
problem. We show that this approach is effective and
justifiable.
2 RELATED WORKS
Since solution by logic based algorithms has proven
intractable for difficult puzzles of high order, auto-
mated Sudoku solving has become the object of a
large amount of highly varied research.
Simonis (Simonis, 2005) did a thorough job defin-
ing the basic constraints in Sudoku puzzles. He also
showed that these constraints can be described in var-
ious ways, creating additional redundant constraints
with which the puzzles can be solved more efficiently.
In his paper, he compares 15 different strategies based
on constraint propagation and showed that the well
posed puzzles in his dataset can all be solved by an
all-different hyperarc solver, if the execution starts
with one shaving move.
Hunt et al. (Hunt et al., 2007) took this one step
further by showing that the constraints can be real-
ized in a binary matrix solvable by the DLX algorithm
provided by Knuth (Knuth, 2000) and that many of
the common logical solving techniques can be sum-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
16
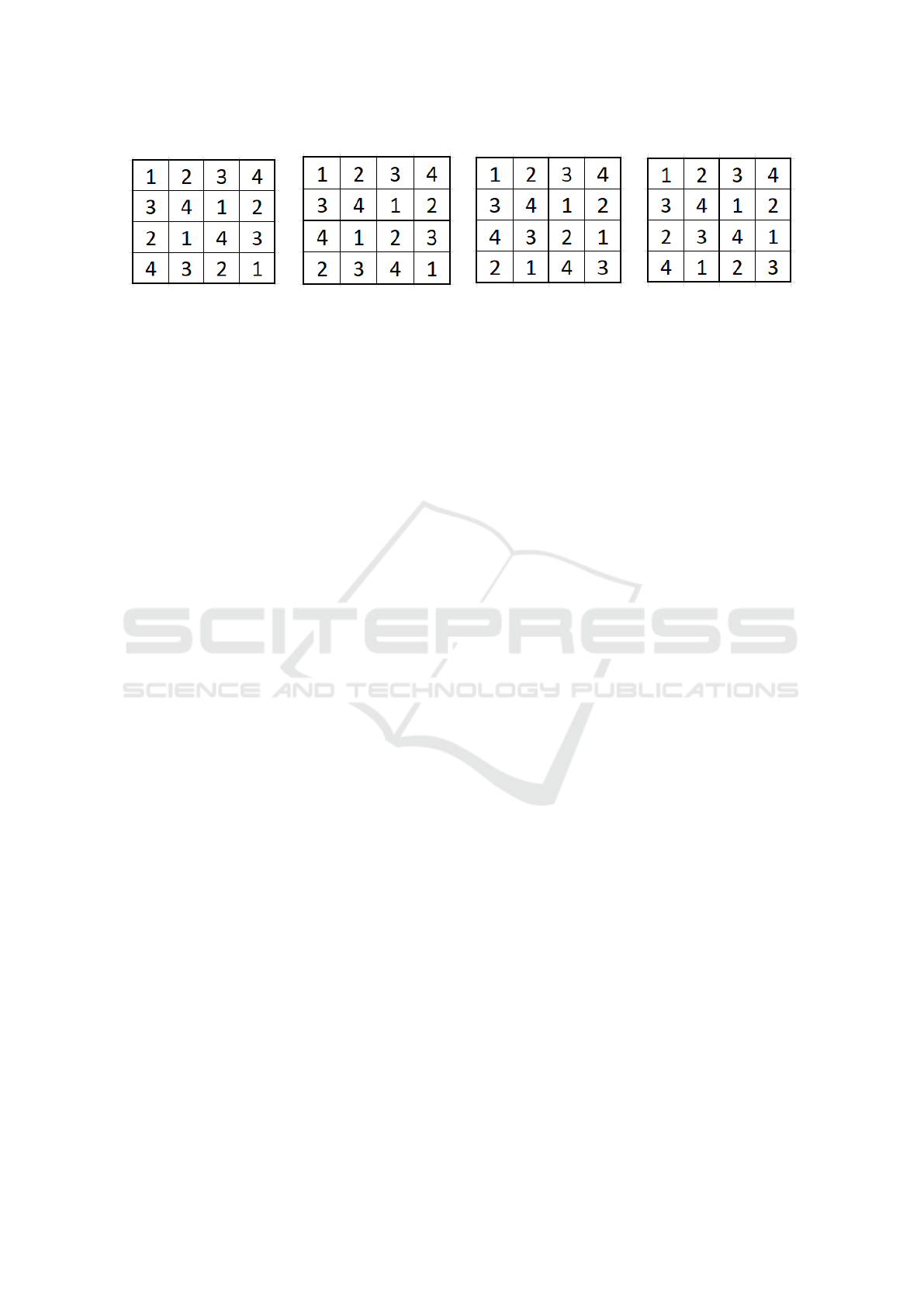
(a) The solution for Fig. 2. (b) 2nd solution for Fig. 2c. (c) 3rd solution for Fig. 2c. (d) 4th solution for Fig. 2c.
Figure 3: Solutions for puzzles in Fig. 2.
marized in a singe theorem based on that matrix. The
advantages of using DLX is that the algorithm is faster
than other backtracking algorithms and also provides
the number of possible solutions thus giving indica-
tion if a puzzle is well posed or not. The disadvantage
in using DLX is that since it is a backtracking algo-
rithm its run-time is exponential by nature.
Another related approach can be found in the
works of Weber (Weber, 2005), Ist et al. (Ist
et al., 2006) and Posthoff and Steinbach (Posthoff
and Steinbach, 2010) who all model Sudoku as a
SAT problem and use various SAT solvers to solve
it. This method utilizes powerful existing systems
but requires explicit definition of the rules and lay-
out of each puzzle, a number of clauses which could
expand exponentially with more complex puzzles. In
our study we favoured machine learning because it
obviates the need of explicit description of the logic
problem.
As mentioned in the introduction, deep learning is
also a good candidate for Sudoku solving. The advan-
tage of machine learning systems in general and deep
learning systems in particular is that they can gener-
alize a direct solution for a problem without having
to use algorithms of exponential or worse runtimes
to solve particular instances of the problem. Once
trained, such a model could be significantly better
even than the DLX algorithm.
Park (Park, 2018) provides a model based on a
standard convolutional neural network that can solve
a Sudoku in a sequence of interdependent steps. It
solved 70 percent of the puzzles it was tested on, us-
ing a loop that predicted the value of the one highest
probability cell in each iteration.
Palm et al. (Palm et al., 2018) created a graph
neural network that solves problems that require mul-
tiple iterations of interdependent steps and showed
that it solved more than 96 percent of the Sudokus
presented to it, including very hard ones as well, al-
though the solution in this method had to be done in
a sequence of interdependent steps. While the results
achieved are noteworthy, it’s important to acknowl-
edge that they necessitated both an understanding of
the problem structure coded manually and a series of
predictive steps towards a solution. In contrast, our
study eliminates the need for prior knowledge of the
problem’s architecture and successfully resolves the
puzzles in a single prediction step.
Wang et al. (Wang et al., 2019) combined a SAT
solver with neural networks to add logical learning
methods that can overcome the difficulty traditional
neural networks have with global constraints in dis-
crete logical relationships. Using that combination
they succeeded in attaining a 98.3 percent comple-
tion rate without any hand coded knowledge of the
problem structure. This approach differs from our ap-
proach in that it requires the use of a SAT solver to
complement the prediction provided by the network.
Moreover, Chang et al. (Chang et al., 2020) showed
that the good results presented by Wang et al. (Wang
et al., 2019) are limited to easy puzzles and the results
are significantly worse than those of Palm et al. (Palm
et al., 2018) when trying to solve hard puzzles.
Mehta (Mehta, 2021) created a reward system for
a Q-agent and achieved 7 percent full puzzle com-
pletion rate in easy Sudokus and 2.1 and 1.2 per-
cent win rates in medium and hard Sudokus respec-
tively all with no rules provided. She did this un-
aware of Poloziuk and Smrkovska (Poloziuk and Sm-
rkovska, 2020) who tested more complex Q-based
agents and Monte-Carlo Tree Search (MCTS) algo-
rithms and came to the conclusion that they require
too much computation power to be used reasonably
to solve Sudoku. With MCTS they performed a small
number of experiments achieving 35-46 percent ac-
curacy and called it a success, even though the results
are fairly low, considering that in each experiment the
training took them days to perform.
Du et al. (Du et al., 2021) used a Multi Layered
Perceptron (MLP) to solve order 2 puzzles. They cre-
ated a small 4 layer dense neural network and per-
formed their prediction stage by stage each time fill-
ing in only the one highest probability cell. Their
dataset included puzzles none of which were locally
minimal - all missing between 4 and 10 values. Their
model solved more than 99 percent of the puzzles
Multiverse: A Deep Learning 4X4 Sudoku Solver
17

tested. However, the vast majority of the puzzles
tested were not locally minimal and the number of
prediction iterations they required were equal to the
number of missing values. In our study, we not only
performed experiments on locally minimal puzzles
with 10, 11, or 12 missing values - the hardest well
posed order 2 puzzles - and attained a completion rate
greater than 99 percent, but did so in a single predic-
tion step, albeit with a more intricate model.
Yang et al. (Yang et al., 2023) trained a generative
pre-trained transformer (GPT) based model with the
dataset used by Palm et al. (Palm et al., 2018) and
tested it with iterative predictions. They had supe-
rior results, solving more than 99 percent of the puz-
zles, although when restricted to the hardest puzzles
achieved a 96.7 percent completion rate. However,
Yang et al. (Yang et al., 2023) required a sequence
of prediction steps to reach the solution and did not
provide a solution in one end-to-end prediction. They
needed 32 prediction iterations to achieve their results
in order 3 puzzles. The baseline for our study is the
model used by Yang et al. (Yang et al., 2023) modi-
fied for order 2 puzzles. We show that our model has
competitively good results in less prediction iterations
than required by their model.
As can be seen above, the significant results so
far have been achieved only in systems that integrate
sequences of interdependent prediction stages. In this
paper we propose a model that achieves competent
results in a single prediction stage.
3 DEEP LEARNING METHODS
Our paper introduces a deep learning approach specif-
ically targeted at tackling order 2 Sudoku puzzles.
These are 4x4 puzzles that, while smaller in scale
compared to the standard order 3 Sudokus, present a
unique appeal for scientific investigation. Given their
relative simplicity, both in terms of representation and
analysis, focusing our research on order 2 puzzles en-
ables more rapid training and facilitates quicker at-
tainment of results.
We consider Sudoku to be akin to a sophisticated,
multi-layered sequence completion problem. With
this perspective, we developed a deep learning neu-
ral network that leverages LSTM modules designed
for sequence completion. This approach has yielded
results that are on par with current leading models.
While our demonstrated results are limited to or-
der 2 puzzles, we maintain the belief that these puz-
zles are sufficiently complex to serve as a sound foun-
dation for creating a successful model for higher-
order Sudoku problems. The importance of study-
Table 1: Well Posed Order 2 Puzzle Count.
H WP LM H WP LM
4 25728 25728 10 2204928 0
5 284160 58368 11 1239552 0
6 1041408 1536 12 522624 0
7 2141184 0 13 161280 0
8 2961024 0 14 34560 0
9 2958336 0
H - The number of hints in the puzzle.
WP - Well Posed, LM - Locally Minimal.
ing 4x4 puzzles lies in the opportunity they provide to
build, test and refine models that could be efficiently
scaled to more intricate Sudoku variants. This makes
them an essential stepping stone in advancing deep
learning methodologies for solving larger and more
complex problems.
In this section we bring the technical information
of our methods, in particular the data composition and
the structure of our models.
3.1 Datasets
Since most of the research into Sudoku was on order
3 puzzles, we did not find an existing dataset of order
2 puzzles so we created our own.
There exist exactly 288 unique order 2 solved Su-
doku boards. Those boards represent 85632 puzzles
which are both well posed and locally minimal, each
containing only 4, 5, or 6 hints. It is possible to create
a larger number of well posed puzzles by adding more
hints, although those puzzles are not locally minimal.
Figures 2 and 3 demonstrate examples for the various
possible types of puzzles and their solutions. Table 1
shows the full number of well posed puzzles with 4 to
14 hints and how many of them are locally minimal.
Our primary dataset consists of all 85632 well
posed and locally minimal order 2 puzzles. Details
on the generation process of the puzzles is provided
in the appendix. The training of our models was per-
formed on a subset of 77069 puzzles using 9-fold
cross validation (We divided the puzzles into 10 sub-
sets and left one out of the process).
The puzzles and their solutions are composed of
strings of digits, where missing values are denoted as
zeros. Since the values are discrete and categorical,
we one-hot encoded them into five digit binary vec-
tors in order to make processing easier.
3.2 Machine Learning Models
Below we describe the models used in this study. The
first section describes our main model, a neural net-
work architecture we call the Multiverse, which is
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
18
composed of a set of parallel computational units.
The next two sections describe variants of the Mul-
tiverse model that we used for our convergence study
and our ablation study. These studies show that all
the parts of each computational unit are important for
the results attained and the results are competent with
state-of-the-art models. The last section describes the
model we used as a baseline for our study.
Multiverse Model
In the model description below, we use the following
variables. o is the order of the puzzle (o = 2 for all
the tests in this study). r is the size of the range of
values possible in a given puzzle (r = 5 for all the
tests in this study, to include the 4 possible values and
zero). s is the length of a side of a given puzzle (s = o
2
always). a is the number of cells in a given puzzle
(a = s
2
always).
Sudoku in many respects is a sequence completion
problem. Each row must be completed with a permu-
tation of the values in the range. Each column and box
must be completed likewise. Each value must have a
location in each row forming a sequence of value-in-
row location indices that requires completion. Sim-
ilarly, such sequences are also formed by values in
columns and boxes. There may exist more aspects of
Sudoku puzzles that can also be viewed as completion
problems but that is subject for a separate study.
Our initial sequence completion unit (below re-
ferred to as a “verse”) is the following sequence of
deep learning layers, with reshape layers between
them where necessary:
1. Conv1D, where: input size = (a, r), output size =
(a, r), filters = r, kernel size = 1, strides = 1
2. Dense, where: input size = (a × r), output size =
(a × r)
3. Bidirectional LSTM, where: input size = (a, r),
output size = (a, 2 × r), return sequences is set to
true.
4. Bidirectional LSTM, where: input size = (a, 2 ×
r), output size = (a, 2 × r), return sequences is set
to true.
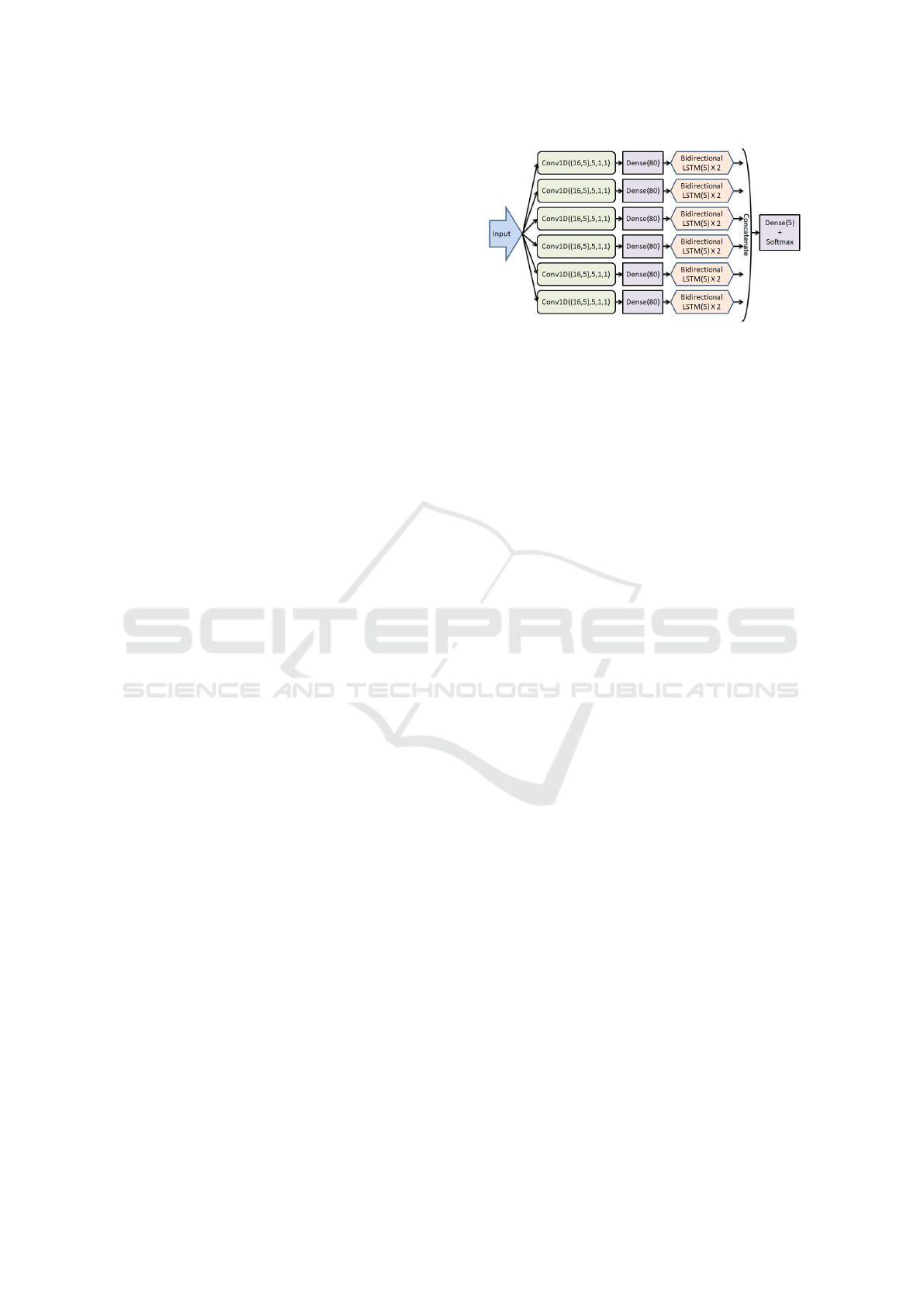
Our complete model is composed of a number
of parallel verses with their output concatenated into
a dense softmax termination layer (hence the name
“Multiverse”). A Multiverse model for order 2 puz-
zles with 6 parallel verses (M6) is depicted in Fig-
ure 4. The motivation for this architecture is that the
combination of the convolutional and the dense layers
provide a basic embedding feature that allows for dif-
ferent interpretations for the parallel verses. The Bidi-
rectional LSTM is a good sequencing modeler when
Figure 4: An order 2 Multiverse model with 6 parallel verse
modules.
the direction is unimportant. Unlike NLP problems,
Sudoku data is discrete and all-different removing the
semantic related aspects from the problem, so other
techniques that have greater effect when used on text
related problems are not required here.
Convergence Study Models
Some of the configurations of the baseline model sur-
passed a 99 percent completion rate, albeit with more
than one prediction, so we performed a study testing
the number of verses required to attain such presti-
gious results in one-shot predictions. This study was
performed on Multiverse models with 6 (See Fig. 4),
10 and 12 parallel verses (called M6, M10, and M12
respectively). M6 was our first robust model with sig-
nificantly good results. We based most of our study
around that model, but also tested the more powerful
M10 and M12 models to show that results achieved
by the baseline are attainable by our model as well.
The results themselves will be detailed in Section 4.
Ablation Study Models
We performed our ablation study on the following in-
complete Multiverse models with 6 verses:
• M6 - 6 complete verses.
• No Conv - 6 verses that have no Conv1D layers.
• No Dense - 6 verses that have no Dense layers.
• No LSTM - 6 verses that have no LSTM layers.
• One LSTM - 6 verses that have only the first
LSTM layer.
• M5 - Only 5 verses, all complete.
Results will be detailed in Section 4.
Baseline Model
As a baseline we modified the transformer based
model provided by Yang et al. (Yang et al., 2023) to
Multiverse: A Deep Learning 4X4 Sudoku Solver
19
fit our order 2 data. The model is based on a MinGPT
module (Karpathy, 2020) set to the input of a Su-
doku puzzle. MinGPT performs the computations on
sparse categorical data. Therefore, the input is not
one-hot encoded, rather left in numerical format with
one change: all the values in the solution that corre-
spond to hints were changed to -100. We maintained
this data format in our modified model.
For a convincing comparison with our model we
ran tests on the baseline model with a variety of set-
tings for the following parameters:
• Recurrences - The number of prediction itera-
tions. We refer to this parameter by the name It-
erations so as not to confuse with RNN.
• Heads - The number of transformer heads used.
• Embedding - The size of the puzzle embedding.
The outcomes will be elaborated upon in Section 4.
4 RESULTS
This section contains the experiments performed in
our study and the results they yielded. The first ex-
periment recorded highlights the effectiveness of our
approach by yielding an impressive completion rate
greater than 99 percent in a single prediction itera-
tion. The second experiment determines the neces-
sity of all the components of our model by showing
the vast improvement each component contributes to
the results. Finally, we present a baseline experiment
resulting with a favorable comparison with state-of-
the-art models. All the training and the testing was
performed using Google Colaboratory.
The metric used in all the tests is the completion
rate, namely the percent of puzzles completed cor-
rectly out of the grand total.
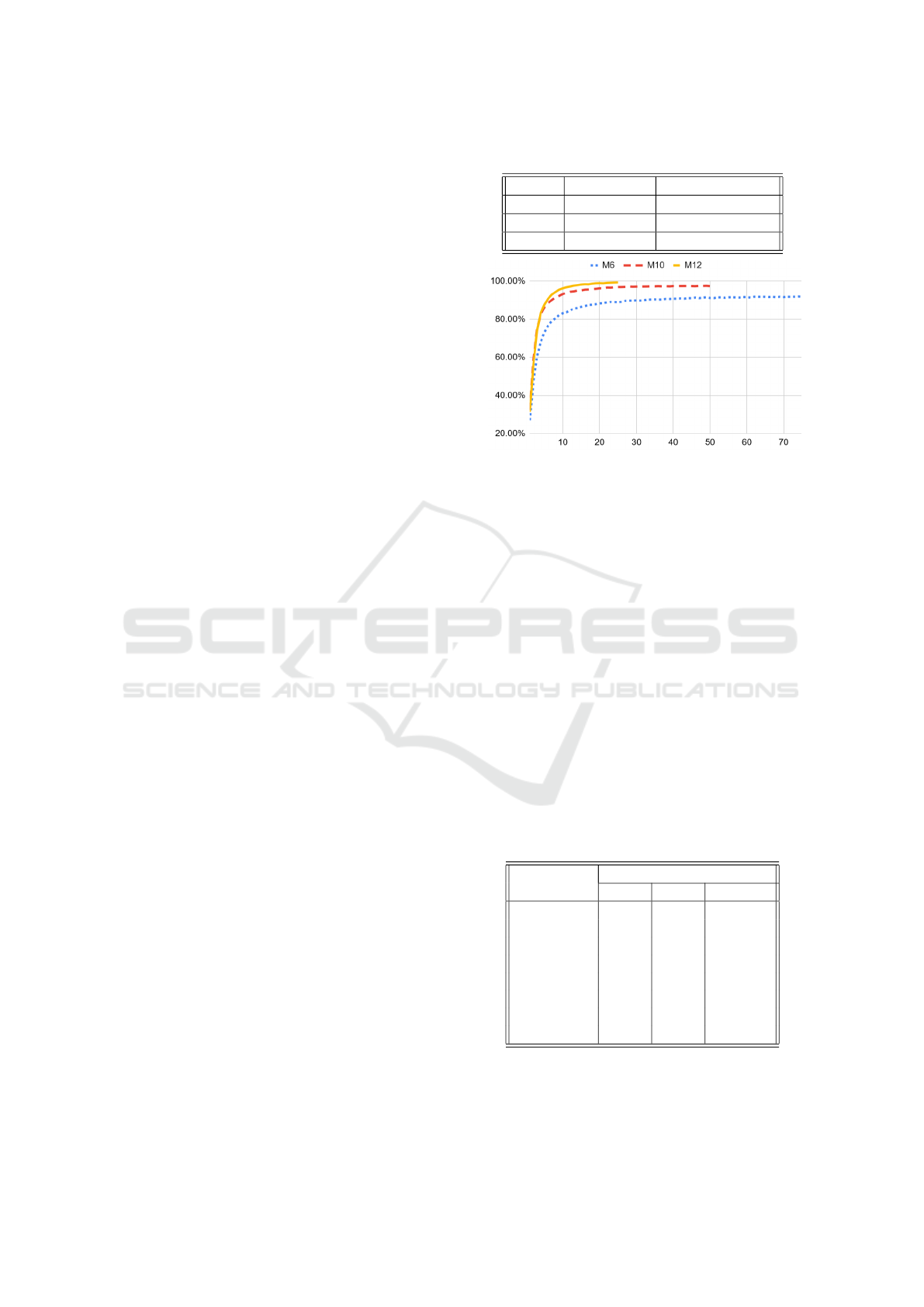
4.1 Convergence Study
With the intent of maximizing the completion rate
of order 2 Sudoku puzzles, our study has produced
compelling findings. The performance of our model,
demonstrated in Table 2 and Figure 5, underscores
the strength of our research approach. Our 12 verse
model successfully achieves an impressive comple-
tion rate of over 99 percent within just 22 epochs, all
within a solitary prediction iteration.
This highlights the ability of our model to effec-
tively tackle nearly all order 2 puzzles, demanding
only a single predictive step for solution. This ro-
bust performance does not only exemplify the model’s
precision, but also its proficiency in rapidly deriving
solutions.
Table 2: Convergence Study Results.
Model No. Epochs Completion Rate
M6 100 92 percent
M10 28 97 percent
M12 22 >99 percent
Figure 5: Completion percentages of M6, M10 and M12
models by number of training epochs.
4.2 Ablation Study
In the ablation study our intent is to show that all the
parts of the model are required and important for the
results achieved.
Table 3 shows the results of the ablation study.
When using complete verses, the completion rates are
higher than when using partial verses, as illustrated
by the M5 completion rate which is higher than all the
completion rates attained by incomplete M6 variants.
As far as the components of each verse are concerned,
The LSTM layers and the dense layer have the great-
est effect on the results as shown by the significantly
low completion rates attained by the No LSTM and
the No Dense models, while the convolutional layer
also has an important role to play as shown by the rel-
atively low completion rates attained by the No Conv
model.
Table 3: Ablation Study Results.
Epochs
Model 5 10 15
M12 87.63 96.25 98.21
M10 86.3 93.25 95.14
M6 73.19 83.18 86.53
No Conv 49.22 68.49 76.11
No Dense 1.69 5.73 9.34
No LSTM 9.5 9.26 9.23
One LSTM 66.01 77.53 81.43
M5 67.04 78.41 82.4
Results are in percent of completion rate.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
20
4.3 Baseline
We now compare our method with the state-of-the art
model. To do so we made use of a modified version
of the model used be Yang et al. (Yang et al., 2023).
Table 4 shows the results of the tests done on the
baseline model over 15 epochs. The original order 3
model had Embedding set to 128 and Heads set to 4.
Since the order 2 problems are simpler than order 3
problems we tried using less complex models with-
out significant results. Since our M6 model might be
comparable with a 6 head transformer model, we also
tested some models that have 6 heads.
Table 4: Baseline Results.
Iterations
Embedding Heads 1 2
16 2 0 0
16 4 0 0.0011
32 2 0.5189 24.41
32 4 0.8822 41.96
128 2 13.17 89.8
128 4 25.06 >99
24 6 2.42 5.28
96 6 27.06 >99
All tests were performed over 15 epochs.
As can be seen, none of the tests reached signifi-
cant results when Iterations was set to 1. In fact, we
continued the 128 embedding 4 heads model up to
200 epochs (the number of epochs used for order 3
in (Yang et al., 2023)) and the results were still only
37.19 percent completion and rising really slowly in
contrast with the 98.21 percent achieved by M12 in
just 15 epochs of training and one prediction itera-
tion, and the 86.53 percent and 82.4 percent achieved
by M6 and M5 respectively (See Table 3).
With 2 iterations the 128 embedding 4 heads
model and the 96 embedding 6 heads model both
achieved >99 percent completion. Even though these
results are excellent, it must be noted both models re-
quired 2 prediction iterations and the results attained
in just one iteration were very poor. This is in con-
trast with our convergence study in which we showed
that the M12 model can achieve a similar >99 percent
completion rate with just one iteration.
5 CONCLUSION
In this paper we approached the Sudoku problem as
a sophisticated sequence completion problem and de-
scribed models for solving 4X4 Sudoku puzzles.
To the best of our knowledge, previous studies
have refrained from using regular end-to-end deep
learning for Sudoku solving because of the implicit
logical connections necessary for the solution. In our
research, we show that when addressing the problem
as a multi-dimensional sequence completion problem
it is possible to reach competent results even with only
a single prediction.
On order 2 puzzles, our M12 model successfully
reached an over 99 percent completion rate with a sin-
gle prediction, a result which required another predic-
tion iteration by the baseline model. The implication
of this result is that not only our model is capable of
solving Sudoku puzzles despite their complexity, but
may prove to have greater competence in this field
than the state-of-the-art models.
Future studies should focus on trying to scale up-
ward to order 3 puzzles, to see if the existing datasets
used in other studies are enough to reach significant
results in less prediction iterations. The described
model is easily scalable to higher-order Sudoku puz-
zles by adjusting the value of o and adding more
verses. However, two key challenges need to be ad-
dressed: the availability of data, as higher-order puz-
zles have a vast number of possible solutions mak-
ing it difficult to compute and store them, and the re-
source requirements - including significant memory
drain and longer training times when scaling up to
higher-order puzzles. These issues taken into account,
it would be interesting to see if competitive results
could still be reached with less predictions.
Future research could also attempt to solve well
posed exact cover problems using the Mutiverse
model. Although the DLX algorithm is capable of
solving such problems, deep learning could reduce
the prediction process to polynomial runtime. The bi-
nary constraint matrix that describes an exact cover
problem could be approached as an extractive se-
quence summary problem, where only those variable
assignments that are relevant for the solution are ex-
tracted from the partially complete list of possible as-
signments that remain after applying the givens of
the problem. The factors contributing to our model’s
strong performance in sequence completion may also
be applicable to extractive sequence summary.
REFERENCES
Chang, O., Flokas, L., Lipson, H., and Spranger, M. (2020).
Assessing satnet’s ability to solve the symbol ground-
ing problem. Advances in Neural Information Pro-
cessing Systems, 33:1428–1439.
Du, H., Gao, L., and Hu, X. (2021). A 4× 4 sudoku solving
model based on multi-layer perceptron. In 2021 Inter-
national Conference on Electronic Information Engi-
Multiverse: A Deep Learning 4X4 Sudoku Solver
21

neering and Computer Science (EIECS), pages 306–
310. IEEE.
Hayes, B. (2006). Unwed numbers. American scientist,
94(1):12.
Hunt, M., Pong, C., and Tucker, G. (2007). Difficulty-
driven sudoku puzzle generation. The UMAP Journal,
29(3):343–362.
Ist, I. L., Lynce, I., and Ouaknine, J. (2006). Sudoku as
a sat problem. In Proceedings of the International
Symposium on Artificial Intelligence and Mathemat-
ics (AIMATH), pages 1–9.
Karpathy, A. (2020). mingpt.
Knuth, D. E. (2000). Dancing links. arXiv preprint
cs/0011047.
Mehta, A. (2021). Reinforcement learning for constraint
satisfaction game agents (15-puzzle, minesweeper,
2048, and sudoku). arXiv preprint arXiv:2102.06019.
Palm, R., Paquet, U., and Winther, O. (2018). Recurrent
relational networks. Advances in neural information
processing systems, 31.
Park, K. (2018). Can convolutional neural networks crack
sudoku puzzles.
Poloziuk, K. and Smrkovska, V. (2020). neural networks
and monte-carlo method usage in multi-agent systems
for sudoku problem solving. Technology audit and
production reserves, 6(2):56.
Posthoff, C. and Steinbach, B. (2010). The solution of dis-
crete constraint problems using boolean models-the
use of ternary vectors for parallel sat-solving. In In-
ternational Conference on Agents and Artificial Intel-
ligence, volume 2, pages 487–493. SCITEPRESS.
Simonis, H. (2005). Sudoku as a constraint problem. In CP
Workshop on modeling and reformulating Constraint
Satisfaction Problems, volume 12, pages 13–27. Cite-
seer.
Wang, P.-W., Donti, P., Wilder, B., and Kolter, Z. (2019).
Satnet: Bridging deep learning and logical reasoning
using a differentiable satisfiability solver. In Interna-
tional Conference on Machine Learning, pages 6545–
6554. PMLR.
Weber, T. (2005). A sat-based sudoku solver. In LPAR,
pages 11–15.
Yang, Z., Ishay, A., and Lee, J. (2023). Learning to solve
constraint satisfaction problems with recurrent trans-
former. In The Eleventh International Conference on
Learning Representations.
APPENDIX
Order 2 Puzzle Dataset Generation
The generation process of locally minimal well posed
order 2 puzzles and their solutions was a 3 stage pro-
cess. The first stage entailed creating a file contain-
ing all the 288 unique solutions for order 2 puzzles
(solutions). We also needed to create a file with all
the 65534 possible 16 bit binary strings except for an
all-0 string which is an empty puzzle and obviously
not well posed and an all-1 string which is a com-
pleted solution (bitmasks). The bitmasks file was cre-
ated in descending order of the amount of zeroes in
the strings. In the final stage, for each solution in so-
lutions we iterated over bitmasks and filtered the well
posed and locally minimal puzzles resulting with a
file with all the 85632 well posed and locally minimal
puzzles and their respective solutions (puzzles).
Stage 1: Order 2 Solutions
Since there are only 288 unique solutions for the or-
der 2 Sudoku problem, this stage is very straightfor-
ward. We simply took an empty puzzle, applied to it
the DLX algorithm, and saved to a file all the resulting
solutions.
Stage 2: Binary Strings
Creation of the bitmasks file was done with array ma-
nipulation. We created empty arrays and added to
them indices of locations where a bit in a mask should
be ‘1’, by gradually appending to the arrays more ar-
rays that are based on them and have more indices
added to them. After that we scanned the arrays and
transformed them into bit strings.
The algorithm runs in Θ(2
16
) for order 2 puz-
zles, and if modified for order o puzzles its runtime
is Θ(2
area
), where area = side
2
and side = o
2
. It uses
a similar amount of memory.
Stage 3: Order 2 Puzzles
This stage approaches the binary strings in bitmasks
as binary masks. We consider a mask a to cover
another mask b if for every i where b[i] =‘1’, also
a[i] =‘1’.
For each solution in solutions we iterate over the
binary masks in bitmasks and for each mask m we
check the following conditions:
• Has a puzzle already been added whose mask is
covered by m (and the refore the puzzle is not lo-
cally minimal)?
• Is the corresponding puzzle well posed?
If the first condition is false and the second is true
we add the corresponding puzzle and its solution to
puzzles.
In order to check if a puzzle is well posed we ap-
ply to it the DLX algorithm and test if the number of
solutions is equal to 1.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
22
