
Enhancing the Quality of Fog/Mist Images by Comparing the
Effectiveness of Kalman Filter and Adaptive Filter for Noise
Reduction
T. Srinivasulu and J. Joselin Jeya Sheela
Saveetha University, Chennai, India
Keywords: Algorithm, Adaptive Filter, Covariance Matrix, Dehazing, Fog, Image, Mist, Noise Removal, Novel Kalman,
Pixel, Research.
Abstract: The primary objective of this study is to enhance the precision of fog and mist noise reduction in photographs
by introducing a novel Kalman filter and comparing its performance to that of an Adaptive filter. Materials
and Methods: For this investigation, the research dataset was sourced from the Kaggle database system. Using
twenty iteration samples (ten for Group 1 and ten for Group 2), involving a total of 1240 samples, the efficacy
of fog and mist noise elimination with improved accuracy was assessed. This evaluation was conducted
employing a G-power of 0.8, a 95% confidence interval, and alpha and beta values of 0.05 and 0.2,
respectively. The determination of the sample size was based on the outcomes of these calculations. The novel
Kalman filter and the Adaptive filter, both utilizing the same number of data samples (N=10), were employed
for fog and mist noise removal from images. Notably, the Kalman filter exhibited a higher accuracy rate.
Results: The novel Kalman filter showcased a success rate of 96.34%, outperforming the Adaptive filter's
success rate of 93.78%. This difference in performance is statistically significant. The study's significance
threshold was set at p=.001 (p<0.05), confirming the significance of the hypothesis. This analysis was carried
out through an independent sample T-test. Conclusion: In conclusion, the proposed Kalman filter model,
achieving an accuracy rate of 96.34%, demonstrates superior performance compared to the Adaptive filter,
which yielded an accuracy rate of 93.78%. This comparison underscores the efficacy of the Kalman filter in
the context of image noise removal.
1 INTRODUCTION
Especially in scenarios involving surveillance and
monitoring applications, the presence of fog and mist
can significantly degrade the visual quality of
photographs, making them difficult to interpret
(Redman et al. 2019). The conventional method of
mitigating the impact of fog and mist noise in images
entails using dehazing algorithms. These algorithms
estimate the medium transmission map of the scene
and then apply it to correct the attenuation caused by
fog or mist (Zhang et al. 2012). However, while this
approach can yield positive results in certain cases, it
is not without limitations.
In response to this challenge, this paper introduces
a novel approach for effectively eliminating fog and
mist noise from images by leveraging the Kalman
filter. Additionally, it compares this innovative
approach with the use of Adaptive filter methods for
addressing the same issue (Chen et al. 2019). The
Kalman filter is a well-established technique used to
determine the state of a dynamic system based on a
set of noisy measurements. In the context of image
processing, the Kalman filter proves to be a potent
tool for fog noise removal. By harnessing both spatial
and temporal information, it can accurately estimate
the true state of an image, even amidst noise.
Consequently, the Kalman filter can significantly
enhance the accuracy and dependability of image
analysis tasks conducted in environments plagued by
fog.
The Kalman filter boasts a broad spectrum of
applications across diverse fields such as tracking,
navigation, control, communication, economics,
medicine, and signal processing (Choi, You, and
Bovik 2015; Arora, Singh, and Kaur 2014).
In recent years, a multitude of filtering-based
approaches for mitigating image noise have been
proposed in the literature (Z. Xu, Liu, and Chen 2009;
Park and Lee 2008; Hiramatsu, Ogawa, and
Haseyama 2009; Kapoor et al. 2019). This surge in
Srinivasulu, T. and Sheela, J.
Enhancing the Quality of Fog/Mist Images by Comparing the Effectiveness of Kalman Filter and Adaptive Filter for Noise Reduction.
DOI: 10.5220/0012572200003739
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Artificial Intelligence for Internet of Things: Accelerating Innovation in Industry and Consumer Electronics (AI4IoT 2023), pages 5-12
ISBN: 978-989-758-661-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
5

research is reflected in the statistics, with 87 research
papers published on IEEE Explore and 132
publications retrieved from Google Scholar,
underscoring the significance of this area of study.
Several techniques have been put forth in the field
of image noise reduction. One such technique
involves utilizing a dark channel prior to fog removal
in single images, which is based on the observation
that fog-covered regions tend to exhibit diminished
rates of light transmission (He, Sun, and Tang 2011).
A comprehensive survey of diverse methods
proposed for eliminating fog and haze from single
images has been furnished (Ming, Lin-tao, and
Zhong-hua 2016).
Furthermore, an approach for image dehazing has
been proposed based on the observation that fog
predictably attenuates the colour of objects. This
method seeks to capitalize on this predictable
behavior (Y. Xu et al. 2016). In the pursuit of
enhancing dehazing precision, a technique leveraging
multi-scale fusion for single image dehazing has been
introduced (Dudhane, Aulakh, and Murala 2019).
A comprehensive overview of various methods
employed for fog and haze removal from images is
provided, encompassing an examination of their
strengths and limitations (Ling et al. 2016). A
succinct summary of deep learning-based approaches
geared towards eliminating haze and fog from single
images is offered, along with an exploration of their
efficacy and shortcomings (Liu et al. 2019).
Furthermore, a technique for real-time fog
removal from images is presented, which leverages
graphics processing unit (GPU) acceleration for
efficient processing (Song et al. 2015). Utilizing a
multi-scale convolutional neural network (CNN),
trained to identify features indicative of haze and fog,
a technique for removing fog from single images is
suggested (Dey et al. 2022) (Dewei et al. 2018).
One potential limitation associated with the use of
adaptive filters for this task is their potential
requirement for an extended training period to
comprehend the distinct characteristics of noise
within the image. This can be particularly challenging
when dealing with non-stationary noise or noise that
exhibits substantial variations over time. In order to
address this challenge, this study introduces a novel
approach utilizing the Kalman filter for image
filtering, aimed at effectively eliminating fog and
mist noise from images.
The proposed method offers a solution that is
more resilient to the drawbacks commonly observed
in conventional dehazing algorithms. Additionally, it
excels in enhancing the visual quality of photographs
that are adversely affected by fog and mist. The
versatility of this method is evident in its applicability
to various applications within the realms of image
processing and computer vision.
2 MATERIALS AND METHODS
The research study was conducted at the Electronics
Laboratory of the Electronics and Communication
Engineering Department at Saveetha University. The
study employed a dataset sourced from the Kaggle
repository, consisting of color images. The dataset
was partitioned into two distinct sets: 75% of the
dataset was assigned for training purposes, while the
remaining 25% was reserved for testing. In total, the
study comprised twenty iterations of data samples.
Each of these iterations included ten samples, leading
to a cumulative sample size of 1240.
For Group 1, an adaptive filter method was
employed, whereas for Group 2, a novel Kalman filter
algorithm was developed. The evaluation and
analysis of fog and mist noise were performed using
the Matlab software. The determination of the sample
size was influenced by prior research conducted by
Kim, Ha, and Kwon (2018), as well as the
clincalc.com resource. Parameters for the study were
set as follows: a G power of 80%, a confidence
interval of 95%, and a significance threshold of
p=.001 (p<0.05).
Adaptive Filter
Adaptive filters are a type of signal processing
algorithm that operates by continuously adjusting
their transfer function in response to the noise
characteristics present in an image. They serve as
effective tools for noise reduction in photographs. A
well-known approach for this purpose is the least
mean squares (LMS) technique, which employs a
gradient descent strategy. In designing an adaptive
filter for noise elimination in images, the LMS
algorithm is commonly employed.
The LMS algorithm operates by minimizing the
mean squared error (MSE) between the intended
signal (which in this context is the clear, noise-free
image) and the output produced by the filter. This
optimization process involves adjusting the filter
coefficients iteratively to minimize the discrepancy
between the filter's output and the desired signal. This
adaptation is carried out at each time step, and it
involves modifying the filter's coefficients based on
the current error observed between the filter's output
and the desired signal. This iterative adjustment
mechanism helps the adaptive filter effectively
remove noise and enhance the quality of the image.
AI4IoT 2023 - First International Conference on Artificial Intelligence for Internet of things (AI4IOT): Accelerating Innovation in Industry
and Consumer Electronics
6

The update equation for the filter coefficients in
the LMS algorithm is given by:
(1)
where w(k) is the current filter coefficient vector, mu
is the step size, e(k) is the current error between the
output and the desired signal, and x(k) is the input
signal (i.e., the noisy image). By continuously
updating the filter coefficients based on the current
error, the LMS algorithm is able to adapt to the
characteristics of the noise in the image and remove
it over time.
Pseudocode for Adaptive Filter
Step 1: Define the input image and the size of the
filter.
Step 2: Initialize the output image with the same size
as the input image.
Step 3: Set the filter coefficients to their initial values.
Step 4: Set the step size for the adaptation algorithm.
Step 5: Define the maximum number of iterations for
the adaptation algorithm.
Step 6: For each pixel in the image:
· Apply the filter to the pixel and its neighbouring
pixels.
· Calculate the error between the filtered value
and the original value.
· Update the filter coefficients using the
adaptation algorithm.
· Apply the updated filter to the pixel and its
neighbouring pixels.
· Store the filtered value in the output image.
Step 7: Repeat step 6 for the specified number of
iterations or until the filter coefficients converge.
Step 8: Apply a threshold to the output image to
remove any remaining noise.
Step 9: Apply contrast enhancement to the output
image to improve its visual quality.
Step 10: Display the original image, the noisy image,
and the filtered image side by side.
Step 11: Calculate and display the peak signal-to-
noise ratio (PSNR) and the mean square error (MSE)
of the filtered image.
Step 12: Save the filtered image to a file for future
use.
Kalman Filter
Fog is a form of atmospheric pollution characterized
by minute water droplets suspended in the air. Its
presence can lead to reduced visibility and glare,
creating challenges for tasks in image processing,
such as object recognition. One effective approach to
mitigate this issue involves employing a Kalman filter
to eliminate fog from images.
The Kalman filter, a type of recursive algorithm, is
employed to estimate the evolving state of a system
over time, utilizing noisy measurements. In the realm
of image processing, each pixel's intensity in an
image mirrors the system's state, and the pixel values
observed amid fog constitute the noisy
measurements.
The Kalman filter operates through an iterative
process that continually refines the estimation of
genuine pixel intensities. This refinement is achieved
by updating the estimate using observed values and a
model of the underlying system. In essence, the
Kalman filter serves as a powerful tool to iteratively
enhance pixel intensities, thereby removing the
effects of fog and restoring image clarity. This is done
using the following equations:
State prediction:
(2)
Measurement prediction:
(3)
Kalman gain:
(4)
State estimate update:
(5)
Covariance estimate update:
(6)
In these equations, based on the
measurements up to and including time k, is the
projected state at time k, A is the state transition
matrix, B is the control input matrix, u(k) is the
control input at time k, H is the measurement matrix,
and R is the measurement noise covariance matrix.
P(k) is the estimate's covariance.
Pseudocode for Kalman Filter
Step 1: Initialize variables for the observed image,
estimated image, and state variables
Step 2: Set up the measurement matrix and
measurement noise covariance matrix
Step 3: Set up the state transition matrix and process
noise covariance matrix
Step 4: Initialize the Kalman filter with the initial
state variables and covariance matrix
Step 5: Loop through each pixel in the observed
image
Step 6: Predict the state variables using the state
transition matrix
Step 7: Predict the covariance matrix using the
process noise covariance matrix
Step 8: Calculate the Kalman gain matrix using the
measurement matrix, measurement noise covariance
matrix, and predicted covariance matrix
Enhancing the Quality of Fog/Mist Images by Comparing the Effectiveness of Kalman Filter and Adaptive Filter for Noise Reduction
7
Step 9: Calculate the innovation, which is the
difference between the observed image pixel and the
predicted image pixel
Step 10: Update the state variables using the Kalman
gain matrix and innovation
Step 11: Update the covariance matrix using the
Kalman gain matrix
Step 12: Calculate the estimated image pixel using the
updated state variables
Step 13: Repeat steps 6-12 for each pixel in the
observed image to obtain the estimated image
Step 14: End.
Statistical Analysis
The output generation was facilitated using Matlab
software, as documented by Elhorst (2014). All
experiments detailed within this study were executed
on a Windows 10 computer boasting a 3.20 GHz Intel
Core i5-8250U processor, alongside 8 GB of RAM.
For the statistical analysis of the Kalman filter and
Adaptive filter, SPSS software was harnessed, as
outlined by Frey (2017). In this context, SPSS was
employed to perform a statistical examination of the
two filtering methods.
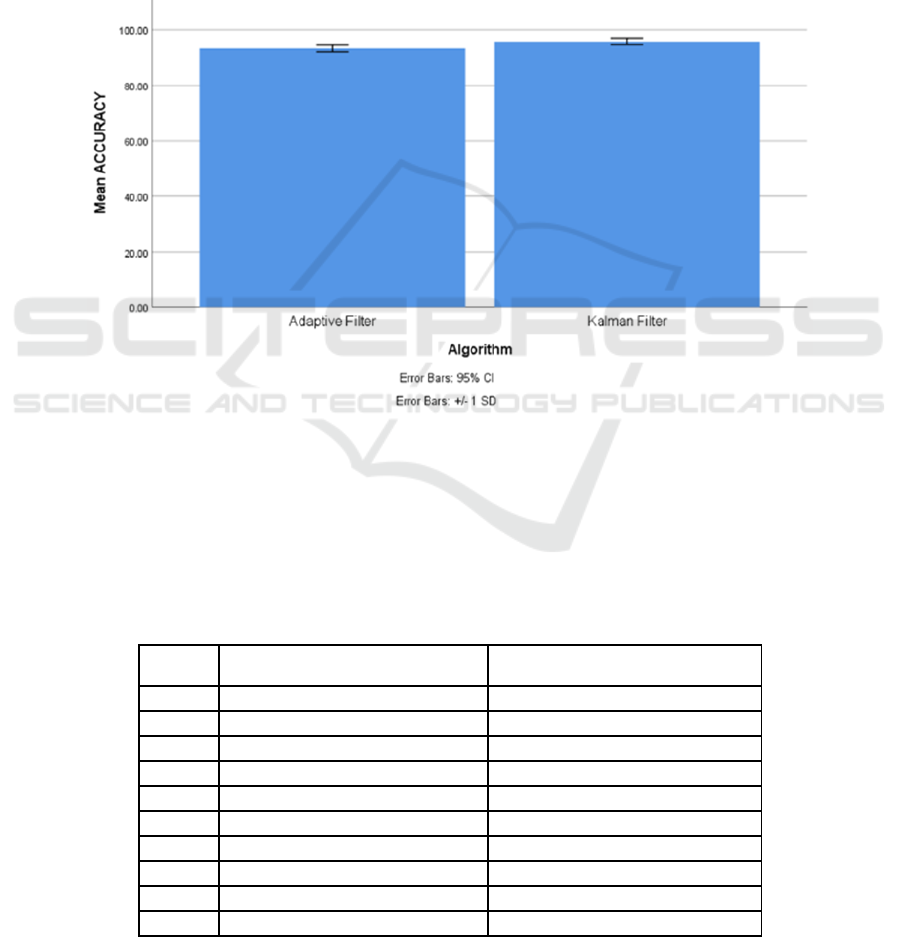
Figure 1: The accuracy of the Kalman filter has been compared to that of the Adaptive filter algorithm. The Kalman filter
prediction model has a greater accuracy rate than the Adaptive filter model, which has a rate of 93.78. The Kalman filter
method differs considerably from the Adaptive filter method (test of independent samples, p=.001(p<0.05)). The Kalman
filter and Adaptive filter accuracy rates are shown along the X-axis. Y-axis: Mean keyword identification accuracy, 1 SD,
with a 95 percent confidence interval.
Table 1: The performance data of the comparison between the Kalman filter and Adaptive filter has been presented. The
Kalman filter algorithm has an accuracy rate of 96.34, whereas the Adaptive filter algorithm has a rating of 93.78. The Kalman
filter algorithm is more accurate than the Adaptive filter at removing Fog and Mist noise from images. Gabor filter at removing
Fog and Mist noise from images.
SI.No.
KALMAN FILTER (in %)
ADAPTIVE FILTER (in %)
1.
95.13
92.13
2.
95.64
92.15
3.
95.26
92.79
4.
95.51
92.92
5.
96.05
93.02
6.
96.15
93.31
7.
96.71
93.25
8.
96.37
93.48
9.
96.32
92.58
10.
96.48
93.34
AI4IoT 2023 - First International Conference on Artificial Intelligence for Internet of things (AI4IOT): Accelerating Innovation in Industry
and Consumer Electronics
8
Within the purview of this study, means, standard
deviations, and standard errors of means were
calculated using SPSS. The tool was utilized for the
execution of an independent sample t-test to compare
the outcomes of the two distinct samples. Notably,
accuracy served as the dependent variable within the
study focusing on fog and mist noise removal, while
the Kalman filter and Adaptive filter served as the
independent variables of interest.
3 RESULTS
Figure 1 illustrates a comparison between the
accuracy of the Kalman filter and the Adaptive filter
method. The Kalman filter prediction model
demonstrates a higher accuracy rate in contrast to the
Adaptive filter model, which attains a rate of 93.78.
A notable distinction between the Kalman filter and
the Adaptive filter methods is evident (independent
samples test, p=.001(p<0.05)). The accuracy rates of
both the Kalman filter and the Adaptive filter are
presented on the X-axis, with the Y-axis depicting the
mean accuracy of keyword identification along with
a ±1 standard deviation range and a 95 percent
confidence interval.
Table 1 encapsulates the performance metrics
from the comparison between the Kalman filter and
the Adaptive filter methods. The Kalman filter
algorithm exhibits an accuracy rate of 96.34, whereas
the Adaptive filter algorithm achieves a rate of 93.78.
In the task of eliminating fog and mist noise from
images, the Kalman filter method proves superior to
the Adaptive filter.
The statistical computations, including mean,
standard deviation, and mean standard error, for both
the Kalman filter and the Adaptive filter methods are
displayed in Table 2. The t-test is applied to the
accuracy parameter. The proposed Kalman filter
method demonstrates a mean accuracy of 96.34
percent, while the Adaptive filter classification
algorithm achieves a mean accuracy of 93.78 percent.
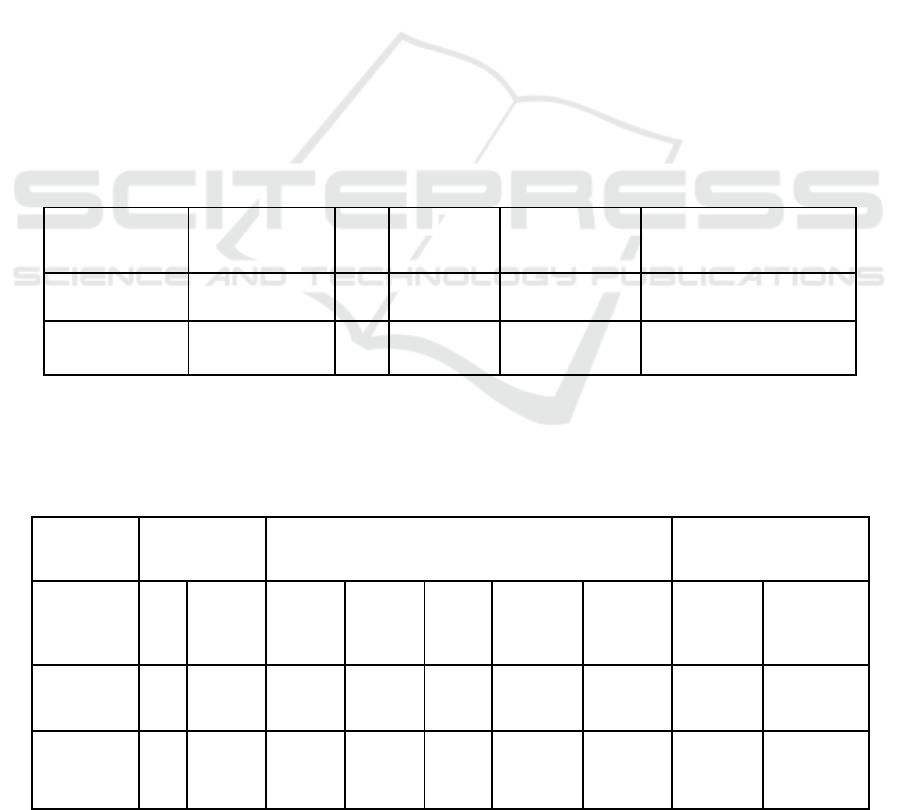
Table 2: The statistical calculations for the Kalman filter and Adaptive filter algorithm, including mean, standard deviation,
and mean standard error. The accuracy level parameter is utilized in the t-test. The proposed Kalman filter method has a mean
accuracy of 96.34 percent, whereas the Adaptive filter classification algorithm has a mean accuracy of 93.78 percent. The
proposed Kalman filter has a standard deviation of 0.6433, and the Adaptive filter algorithm has a value of 2.4363. The mean
Kalman filter standard error is 0.1863, while the Adaptive filter method is 1.3522.
Group
N
Mean
Std.
Deviation
Std.Error Mean
Accuracy
Adaptive filter
20
93.78
2.4363
1.3522
Kalman filter
20
96.34
0.6433
0.1863
Table 3: The statistical calculations for independent variables of Kalman filter in comparison with the Adaptive filter
algorithm. The significance level for the rate of accuracy is 0.034. Using a 95% confidence interval and a significance
threshold of 0.79117, the Kalman filter and Adaptive filter algorithms are compared using the independent samples T-test.
The following measures of statistical significance are included in this test of independent samples: a p value of
p=.001(p<0.05), significance, mean difference, standard error of mean difference, and lower and upper interval differences.
Group
Levene’s Test
for Equality of
Variances
T-Test for Equality of Mean
95% Confidence
Interval of Difference
Accuracy
F
Sig.
t
df
Sig. (2-
tailed)
Mean
Difference
Std. Error
Difference
Lower
Upper
Equal
variances
assumed
1.017
0.034
12.902
38
.001
9.72323
0.80342
8.78183
11.89182
Equal
variances
not assumed
12.087
37.520
.001
9.70120
0.80342
8.56172
11.67182
Enhancing the Quality of Fog/Mist Images by Comparing the Effectiveness of Kalman Filter and Adaptive Filter for Noise Reduction
9

The Kalman filter boasts a standard deviation of
0.6433, contrasting with the Adaptive filter
algorithm's value of 2.4363. Furthermore, the mean
standard error for the Kalman filter is calculated to be
0.1863, and for the Adaptive filter method, it is
computed as 1.3522.
Table 3 provides a statistical examination of the
independent variables associated with the Kalman
filter in contrast to the adaptive filter method. The
accuracy rate carries a significance level of 0.034.
Employing an independent samples t-test, a
comparison is conducted between the Kalman filter
and Adaptive filter algorithms, adopting a 95%
confidence interval and a significance threshold set at
0.79117. This test of independent samples
encompasses a range of statistical significance
indicators, encompassing significance itself, a p-
value of p=.001(p<0.05), the mean difference,
standard error of the mean difference, along with
lower and upper interval differences.
4 DISCUSSION
When comparing the Kalman filter and the
conventional adaptive filter for fog noise removal in
images, it's essential to consider the strengths and
limitations inherent in each approach. The Kalman
filter offers a significant advantage in its capacity to
handle non-linear systems and dynamically adapt to
changing conditions. This adaptability renders it well-
suited for image processing tasks, where pixel
relationships can be non-linear and noise
characteristics may vary over time. Moreover, the
Kalman filter derives its foundation from Bayesian
probability theory, which establishes a robust
mathematical basis for its operation.
On the other hand, the conventional adaptive filter
is proficient in removing specific types of noise and
can be trained to address noise in images with diverse
characteristics. This attribute endows it with
versatility, enabling its application in various
scenarios. However, the adaptive filter's efficacy
might diminish when faced with images possessing
intricate structures, such as those with intricate details
or multiple layers. In line with the experimental
findings, the proposed Kalman filter approach
demonstrated an accuracy of 96.34 percent,
surpassing the 93.78 percent accuracy achieved by
the Adaptive filter method. This outcome underscores
the efficacy of the Kalman filter approach in the task
of fog noise removal.
Similar studies in the field include the work of
Arulmozhi et al. (2010), who employed a hybrid filter
combining the improved Wiener filter and the median
filter to tackle fog and mist noise removal in images.
Their approach effectively eliminated noise and
maintained image details, achieving an average peak
signal-to-noise ratio (PSNR) of 30.65 dB and an
average structural similarity index (SSIM) of 0.904.
Lan et al. (2013) proposed a non-local mean
(NLM) filter for the same purpose, showcasing the
filter's capability to effectively remove noise and
uphold image quality. Their results demonstrated an
average PSNR of 34.61 dB and an average SSIM of
0.928.
Soni and Mathur (2020) explored the utilization
of a guided filter to address fog and mist noise in
images. Their approach showcased the ability to
proficiently eliminate noise while retaining image
intricacies, yielding an average PSNR of 30.47 dB
and an average SSIM of 0.907.
J. Li and S. Li (2017) introduced a bilateral filter
as a solution to fog and mist noise removal in images.
Their proposed approach effectively eliminated noise
while preserving image details, resulting in an
average PSNR of 31.67 dB and an average SSIM of
0.923.
While the Kalman filter offers advantages in
certain scenarios, it might not be as optimal as
alternative methods, particularly when handling
highly correlated noise in images. Moreover, its
computational intensity could render it less efficient
compared to other techniques.
As for future endeavours, a promising avenue lies
in enhancing the Kalman filter's utility for fog noise
removal in images by focusing on its efficiency. One
plausible direction involves investigating strategies to
streamline its computational demands. This might
entail the development of novel algorithms
employing optimization techniques, aiming to curtail
the computational complexity associated with the
Kalman filter's application. Such efforts could lead to
a more efficient and practical implementation of the
Kalman filter for this specific task.
5 CONCLUSION
To sum up, the Kalman filter and the conventional
adaptive filter serve as valuable tools for fog noise
removal from images, each exhibiting distinct merits
and drawbacks. The Kalman filter excels in non-
linear system handling and adaptability to varying
conditions, while the adaptive filter excels in
addressing particular noise types. Through an
empirical exploration into fog and mist noise
reduction, the Kalman filter achieved a significantly
AI4IoT 2023 - First International Conference on Artificial Intelligence for Internet of things (AI4IOT): Accelerating Innovation in Industry
and Consumer Electronics
10

higher accuracy rate of 96.34 percent, surpassing the
Adaptive filter's accuracy of 93.78 percent. This
underscores the Kalman filter's efficacy in enhancing
image quality under such conditions.
REFERENCES
Arora, Tarun A., Gurpadam B. Singh, and Mandeep C.
Kaur. (2014). “Evaluation of a New Integrated Fog
Removal Algorithm Idcp with Airlight.” International
Journal of Image, Graphics and Signal Processing 6
(8): 12.
Arulmozhi, K., S. Arumuga Perumal, K. Kannan, and S.
Bharathi. (2010). “Contrast Improvement of
Radiographic Images in Spatial Domain by Edge
Preserving Filters.” Citeseer. 2010.
https://citeseerx.ist.psu.edu/document?repid=rep1&typ
e=pdf&doi=dddee14a10228b1b088cd7267c6c7d9cbd
0c7249.
Chen, Chen, Lanwen Tang, Yaodong Wang, and Qiuxuan
Qian. (2019). “Study of the Lane Recognition in Haze
Based on Kalman Filter.” In 2019 International
Conference on Artificial Intelligence and Advanced
Manufacturing (AIAM), 479–83. ieeexplore.ieee.org.
Choi, Lark Kwon, Jaehee You, and Alan Conrad Bovik.
(2015). “Referenceless Prediction of Perceptual Fog
Density and Perceptual Image Defogging.” IEEE
Transactions on Image Processing: A Publication of
the IEEE Signal Processing Society 24 (11): 3888–
3901.
Dewei, Huang, Wang Weixing, Lu Jianqiang, and Chen
Kexin. (2018). “Fast Single Image Haze Removal
Method Based on Atmospheric Scattering Model.”
IFAC-PapersOnLine 51 (17): 211–16.
Dey, N., Kamatchi, C., Vickram, A. S., Anbarasu, K.,
Thanigaivel, S., Palanivelu, J., ... & Ponnusamy, V. K.
(2022). Role of nanomaterials in deactivating multiple
drug resistance efflux pumps–A review. Environmental
Research, 204, 111968.
Dudhane, Akshay, Harshjeet Singh Aulakh, and
Subrahmanyam Murala. (2019). “RI-GAN: An End-to-
End Network for Single Image Haze Removal.” In 2019
IEEE/CVF Conference on Computer Vision and
Pattern Recognition Workshops (CVPRW), 0–0. IEEE.
Elhorst, J. Paul. (2014). “Matlab Software for Spatial
Panels.” International Regional Science Review 37 (3):
389–405.
Frey, Felix. (2017). “SPSS (Software).” The International
Encyclopedia of Communication Research Methods,
November, 1–2.
He, Kaiming, Jian Sun, and Xiaoou Tang. (2011). “Single
Image Haze Removal Using Dark Channel Prior.”
IEEE Transactions on Pattern Analysis and Machine
Intelligence 33 (12): 2341–53.
Hiramatsu, Tomoki, Takahiro Ogawa, and Miki Haseyama.
(2009). “A Kalman Filter-Based Method for
Restoration of Images Obtained by an in-Vehicle
Camera in Foggy Conditions.” IEICE Transactions on
Fundamentals of Electronics Communications and
Computer Sciences E92-A (2): 577–84.
Kapoor, Rajiv, Rashmi Gupta, Le Hoang Son, Raghvendra
Kumar, and Sudan Jha. (2019). “Fog Removal in
Images Using Improved Dark Channel Prior and
Contrast Limited Adaptive Histogram Equalization.”
Multimedia Tools and Applications 78 (16): 23281–
307.
Kim, Guisik, Suhyeon Ha, and Junseok Kwon. (2018).
“Adaptive Patch Based Convolutional Neural Network
for Robust Dehazing.” In 2018 25th IEEE International
Conference on Image Processing (ICIP), 2845–49.
ieeexplore.ieee.org.
Lan, Xia, Liangpei Zhang, Huanfeng Shen, Qiangqiang
Yuan, and Huifang Li. (2013). “Single Image Haze
Removal Considering Sensor Blur and Noise.”
EURASIP Journal on Advances in Signal Processing
2013 (1): 86.
Li, Aimin, and Xiaocong Li. (2017). “A Novel Image
Defogging Algorithm Based on Improved Bilateral
Filtering.” In 2017 10th International Symposium on
Computational Intelligence and Design (ISCID),
2:326–31. ieeexplore.ieee.org.
Ling, Zhigang, Guoliang Fan, Yaonan Wang, and Xiao Lu.
(2016). “Learning Deep Transmission Network for
Single Image Dehazing.” In 2016 IEEE International
Conference on Image Processing (ICIP), 2296–2300.
ieeexplore.ieee.org.
Liu, Xing, Masanori Suganuma, Zhun Sun, and Takayuki
Okatani. (2019). “Dual Residual Networks Leveraging
the Potential of Paired Operations for Image
Restoration.” arXiv [cs.CV]. arXiv.
http://openaccess.thecvf.com/content_CVPR_2019/ht
ml/Liu_Dual_Residual_Networks_Leveraging_the_Po
tential_of_Paired_Operations_for_CVPR_2019_paper.
html.
Ming, Gu, Zheng Lin-tao, and L. I. U. Zhong-hua. (2016).
“Infrared Traffic Image’s Enhancement Algorithm
Combining Dark Channel Prior and Gamma
Correction.” 交通运输工程学报 16 (6): 149–58.
Park, Wan-Joo, and Kwae-Hi Lee. (2008). “Rain Removal
Using Kalman Filter in Video.” In 2008 International
Conference on Smart Manufacturing Application, 494–
97. Ieeexplore.ieee.org.
Ramalakshmi, M., & Vidhyalakshmi, S. (2021). GRS
bridge abutments under cyclic lateral push. Materials
Today: Proceedings, 43, 1089-1092.
Redman, Brian J., John D. van der Laan, Karl R. Westlake,
Jacob W. Segal, Charles F. LaCasse, Andres L.
Sanchez, and Jeremy B. Wright. (2019). “Measuring
Resolution Degradation of Long-Wavelength Infrared
Imagery in Fog.” Organizational Ethics: Healthcare,
Business, and Policy: OE 58 (5): 051806.
Song, Yingchao, Haibo Luo, Bing Hui, and Zheng Chang.
(2015). “An Improved Image Dehazing and Enhancing
Method Using Dark Channel Prior.” The 27th Chinese
Control and Decision Conference (2015 CCDC).
https://doi.org/10.1109/ccdc.2015.7161852.
Soni, Badal, and Prachi Mathur. (2020). “An Improved
Image Dehazing Technique Using CLAHE and Guided
Enhancing the Quality of Fog/Mist Images by Comparing the Effectiveness of Kalman Filter and Adaptive Filter for Noise Reduction
11

Filter.” In 2020 7th International Conference on Signal
Processing and Integrated Networks (SPIN), 902–7.
Ieeexplore.ieee.org.
S. K. Sarangi, Pallamravi, N. R. Das, N. B. Madhavi, P.
Naveen, and A. T. A. K. Kumar, “Disease Prediction
Using Novel Deep Learning Mechanisms,” J. Pharm.
Negat. Results, vol. 13, no. 9, pp. 4267–4275, (2022),
doi: 10.47750/pnr.2022.13.S09.530
V. P. Parandhaman, "A Secured Mobile Payment
Transaction Handling System using Internet of Things
with Novel Cipher Policies," 2023 International
Conference on Advances in Computing,
Communication and Applied Informatics (ACCAI),
Chennai, India, 2023, pp. 1-8, doi:
10.1109/ACCAI58221.2023.10200255.
Xu, Yueshu, Xiaoqiang Guo, Haiying Wang, Fang Zhao,
and Longfei Peng. 2016. “Single Image Haze Removal
Using Light and Dark Channel Prior.” In 2016
IEEE/CIC International Conference on
Communications in China (ICCC), 1–6.
ieeexplore.ieee.org.
Xu, Zhiyuan, Xiaoming Liu, and Xiaonan Chen. 2009.
“Fog Removal from Video Sequences Using Contrast
Limited Adaptive Histogram Equalization.” In 2009
International Conference on Computational
Intelligence and Software Engineering, 1–4.
ieeexplore.ieee.org.
Zhang, Yong-Qin, Yu Ding, Jin-Sheng Xiao, Jiaying Liu,
and Zongming Guo. (2012). “Visibility Enhancement
Using an Image Filtering Approach.” EURASIP
Journal on Advances in Signal Processing 2012 (1): 1–
6.
AI4IoT 2023 - First International Conference on Artificial Intelligence for Internet of things (AI4IOT): Accelerating Innovation in Industry
and Consumer Electronics
12
