
Gesture Controlled Device with Vocalizer for Physically Challenged
People
Nithin M A
1 a
, Kartik Ghanekar
1 b
Prajwal A M
1 c
, Prajwal B R
1 d
and Tanuja H
1 e
1
Department of Electrical and Electronics Engineering, Dayananda Sagar College of Engineering, Bengaluru, India
tanuja-eee@dayanandasagar.edu
Keywords: Hand Gesture Vocalizer, Sign Language, Communication of Speech Impaired, Accelerometer Sensor.
Abstract: Hand Gesture Vocalizer is a social project that aims to raise the morale of the speech and hearing impaired
by enabling them to communicate better with the society. This project aims to meet the need to create an
electronic device that can translate sign language to speech in order to eliminate the communication of speech
impaired and the general public. A Motion Controlled vehicles are robots that can be controlled by simple
human movements. The Robot and Motion device connect wirelessly via wireless radio. We can use the
accelerometer along with the glove box to control the car movement by direction. These sensors are designed
to replace the traditional remote control used to operate it. It will allow the user to control forward, reverse,
left and right movement while using the same accelerometer sensor to control the vehicle's accelerator pedal.
The main advantage of this mechanism is the car, which can smoothly make sharp turns. The robotic arm is
a glove that imitates the movements of the human hand.
1 INTRODUCTION
Humans have the ability to speak languages to
communicate and interact. Unfortunately, not
everyone can speak and hear. Sign languages used by
people who cannot speak or hear in the community is
not understandable to general public. A gesture
vocalizer is a gesture-based glove that includes a
combination of hand shapes, hand gestures, and facial
expressions for clarity in what the speaker is thinking.
Normal people do not use the sign language to
communicate with other dumb people as they do not
know the meaning of the sign even with other people
who always know the meaning of language.
However, people cannot interpret normal speaking
mute and deaf sign language, and not everyone can
learn the language. So, another option for
is that we
can use a computer or a smartphone as a modem. A
computer or smartphone can take input from a mute
person and convert it to text and audio. We
use sensor- based technology. We have created a
a
https://orcid.org/0009-0005-2540-9798
b
https://orcid.org/0009-0009-3351-129X
c
https://orcid.org/0009-0008-7436-0507
d
https://orcid.org/0009-0006-0900-1407
e
https://orcid.org/0009-0008-9880-132X
module that converts finger movements into sound. A
more humane, succinct, and natural approach to
human-computer interaction is required in
intelligence. Related equipment can perform remote
operation duties on unmanned platforms in uncharted
regions through human-computer interaction.
Wearing appropriate gear, the driver can wirelessly
and remotely control the smart car. A new entry point
for the evolution of human-computer interaction is
gesture recognition. The physical gadget is controlled
by the conversion of gestures as a signal change,
assisting users in finishing the designated tasks. The
entertainment and gaming industries have used
somatosensory-based human-computer interface
technologies.
Robots that can be controlled by hand gestures
rather than traditional buttons are known as gesture-
controlled robots. We only have to wear a small
transmitting gadget with an acceleration meter or
glove in your hand. This will send the robot the proper
command, enabling it to carry out our instructions.
M A, N., Ghanekar, K., A M, P., B R, P. and H, T.
Gesture Controlled Device with Vocalizer for Physically Challenged People.
DOI: 10.5220/0012504300003808
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Intelligent and Sustainable Power and Energy Systems (ISPES 2023), pages 9-14
ISBN: 978-989-758-689-7
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
9
ADCs for analogue to digital conversion and an ADC
were integrated in the transmitting device. By using an
RF Transmitter module, it will send an encoder. The
encoded data is received and decoded at the receiving
end by an RF Receiver module. A microcontroller
processes this data next, and our
motor driver uses the
results to regulate the motors. To make the
task simple
and straightforward to do, it is now necessary to
divide it into separate modules receiver and
transmitter.
2 LITERATURE REVIEW
(Kadam K. et.al,2012) “American Sign Language
Interpreter” discussed an effective use of glove for
implementing an interactive sign language teaching
programme. They believe that, with the use of glove,
signs can be made with more accuracy and better
consistency. Having a glove also would enable to
practice sign language without having to be next to a
computer.
(M. S Kasar.et.al ,2019) have developed a smart
talking glove for speech patients and people with
disabilities. Often times, people with aphasia
communicate in sign language that people cannot
understand. They created programs to solve this
problem, allowing non-speaking patients to
communicate with people. They use a flexible sensor
that sits on the glove to detect finger movements.
Depending on the finger movement, the ATmega328
microcontroller will display the information on the
LCD.
(Prerana K. C , 2019) proposed a method of Hand
Gesture Recognition
system. A system that can read the
values for a particular gesture
done by the user and
predict the output for the gesture. This system is not
that reliable because the dataset for all the alphabets
and frequently used words was not created.
(Kunjumon, J., & Megalingam, R. K, 2010) in
their work Communication is just a means of
conveying information from one place, person or
group to another or with each other. Voice
communication is how people interact with other
people. Because perhaps not all of us have a physical
disability that prevents us from verbally sharing our
thoughts. It is difficult for deaf people to communicate
their thoughts and ideas to people. Most people do not
know the language, which makes it difficult for people
who remain silent to communicate with others. There
are tools that can convert sign language to text that
can be used in other languages.
3 METHODOLOGIES
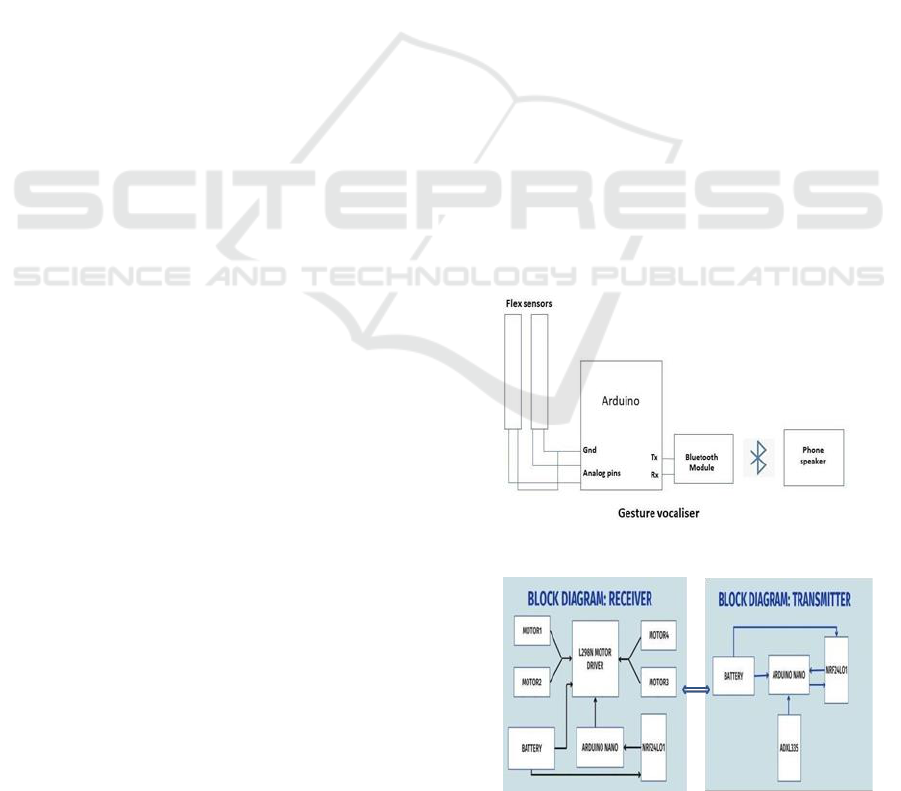
The Gesture vocalizer is nothing but a normal glove
with 4 fingers that can be adjusted by connecting the
fingers together or using glue. Help the sensor bend
correctly and provide the correct voltage drop, the
controller can sense the voltage drop in the
appropriate direction. The glove used in this system
has 4 flexible sensors. The flexible sensors used in
this module are mounted on each finger of the
gesture control glove. The efficiencies of flexible
sensors depend on the bending moment and the
measurement by sign.
The result is then sent to the microcontroller
where the same work is done and converted to
digital format. The result of this output changes as
the variable is bent. The microcontroller uses the
output from the converter and the Arduino converts
the received signal to text and sends it to the
Bluetooth module, which will be connected to the
phone to convert the text to speech.
For moving vehicle there is serial
communication between the two Arduino nano
boards. One Arduino is used for sending the signals
and the other Arduino is used for receiving those
signals and move the moving vehicle accordingly.
There is an accelerometer sensor that can sense the
gesture of our hand. The transmitter sends the
signals via an Zigbee rf module that we use for
wireless communication.
Fig 1. Block diagram for Gesture based vocaliser.
Fig 2. Block diagram Gesture based moving vehicle.
ISPES 2023 - International Conference on Intelligent and Sustainable Power and Energy Systems
10
We have to tie the transmitter circuit on our
hands and the moving vehicle will move as we
move our hands. For controlling the dc motors, we
have in L298D motor driver module.
4 TOOLS USED FOR THE
PROJECT WORK
BLUETOOTH MODULE (HC-05)
HC-05 is a Bluetooth module designed for transparent
wireless communication. It is preconfigured as a
Bluetooth slave device. When combined with a
Bluetooth host device such as PCs, smartphones and
tablets, its operation becomes transparent to users.
Bluetooth-enabled devices automatically detect each
other when they are close to each other. Bluetooth
uses 79 different radios in about 2 small bands with
4GHz. This frequency band is also used by Wi-Fi, but
Bluetooth uses little energy and is less effective for
Wi-Fi communication.
4.1 Arduino Uno Microcontroller Board
The hub of the Arduino ecosystem is the commonly
used microcontroller board known as the Arduino
UNO. It's intended to give both novice and seasoned
developers an approachable and user-friendly
platform to build interactive projects and prototypes.
The ATmega328P microcontroller, on which the
Arduino UNO board is based, has a variety of digital
and analogue input/output pins that are simple to
programme and control. It has a 16 MHz quartz
crystal, 6 analogue input pins, 14 digital input/output
pins (of which 6 can be used as PWM outputs), a USB
connection for programming and power, an ICSP
header, and a reset button.
The Arduino UNO allows users to quickly
prototype because of its simple programming
environment and a large library of pre-built
functionality.
4.2 Flex Sensor
A flex sensor, or bending sensor, is a sensor that
measures the
amount of deflection or bending. Usually,
the sensor is connected
somewhere and the resistance
of the main sensor is changed by bending the ground.
Since the resistance is directly proportional to the
amount of bending, it is often called a flexible
potentiometer. Flexible sensors, computer interfaces,
rehabilitation, security systems and even music
interfaces are widely used in research.
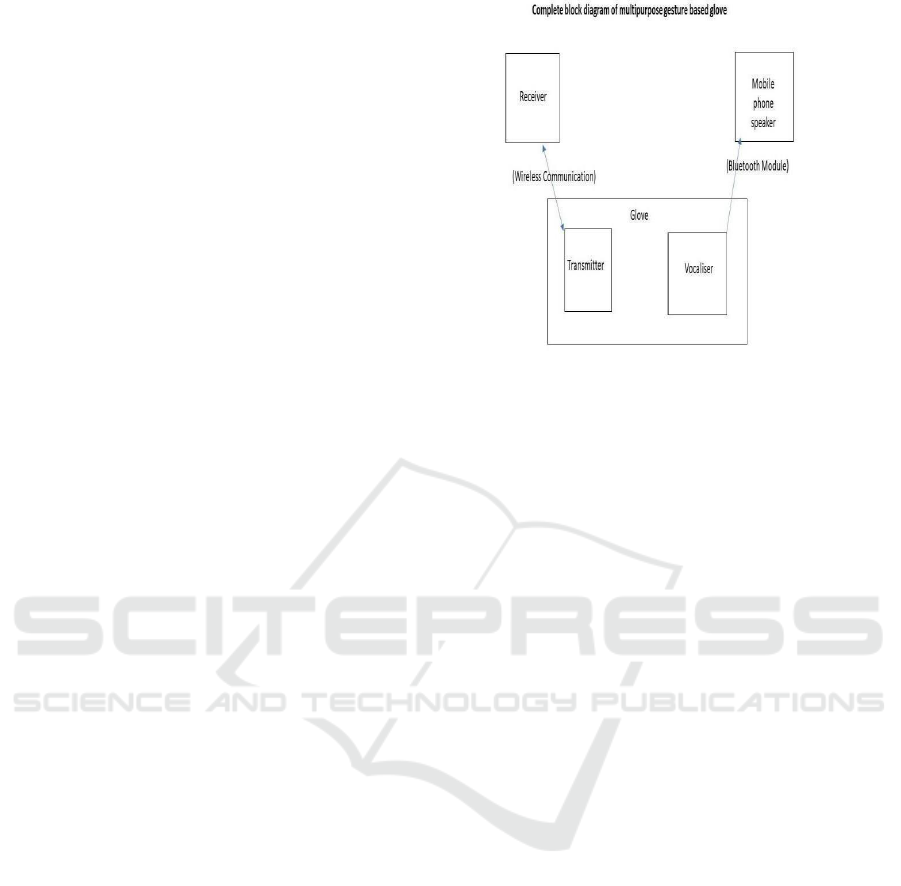
Fig 3. Complete block diagram.
4.3 Zigbee
Zigbee is an ideal communications technology for
establishing personal connections through small, low-
power radios such as home appliances, medical data
collection, and other low-demand, low-bandwidth
applications designed for small devices that require
wireless connectivity. The technology outlined in the
Zigbee specification is designed to be simpler and
cheaper than other Wireless Local Area Networks
(WPAN) such as Bluetooth or more wireless
networks such as Wi-Fi. "ZIGBEE" represents the
international standard for regional integration, battery
life, economy and efficiency.
4.4 Arduino Nano
Arduino Nano is a small, complete, enhanced
development based on the ATmega328. It has more
or less the same functionality as the Arduino, but in a
different package. It has only DC power and can use a
Mini-B USB cable instead of a standard cable.
Arduino Nano is a micro controller-based device with
16 digital pins that can be used for many purposes. It
can be used for almost any project from small to large.
It can also be used to build and build new apps.
4.5 Accelerometer
An accelerometer is a device that detects various
types of acceleration or vibration. Acceleration is the
change in velocity caused by the motion of an object.
The accelerometer absorbs the vibrations created by
the body and uses it to understand the direction of the
body. Accelerometers are just one of many sensors
that video telematics systems use to capture important
Gesture Controlled Device with Vocalizer for Physically Challenged People
11

vehicle information. These systems may include
multi-axis accelerometers for speed, acceleration and
deceleration, gyroscopes to detect rotation and
direction, and GPS to detect position. The basic
working principle of an accelerometer is to convert
energy into electricity. When a large object touches
the sensor, it bounces off and starts moving. As soon
as he moved, he began to accelerate.
4.6 Motor Driver
A generator is an electrical device that converts
electricity into electricity. Thus, the drive allows you
to use electricity for automatic operation. There are
many types of electric motors. These types include
DC motors, stepper motors and servo motors. The
working model of the engine and its different
characteristics. The driver itself is the interface
between the motor and the microcontroller. This is
because the microcontroller and the motor operate at
different speeds. The motor will use a higher current
level than the microcontroller. First, the
microcontroller sends the signal to the motor. The
received signals are then interpreted and processed in
the engine. The motor has two power input pins. Pin 1
powers the driver and pin 2 powers the motor using
the motor IC.
5 TESTING
For gesture vocalizer we tested many combinations of
finger gestures, with each finger gesture there was
bending of flex sensor and as we know the working of
flex sensor, and the resistance of the main sensor is
changed by bending the ground. Since the resistance
is directly proportional to the amount of bending, it is
often called a flexible potentiometer. So, we tested for
different combinations and noted down the voltage
drop occurring in the flex sensors. So, as we had a
plan to make gesture vocalizer glove so when the
person is unable to speak when he wears the glove as
shown in below figure. For different hand gesture we
tested different voltage value as we will show that
what is the voltage drop for different hand gesture.
6 SOFTWARE MPLEMENTATION
We utilize Arduino IDE, for coding we had written
the code firstly for gesture vocalizer and uploaded the
code to microcontroller (Arduino UNO). We had
written code to take output from flex sensors and take
the value from the sensor and store it in a variable.
And had written if conditions in the code that if the
value of thevariable is more than the calibrated
value then the predefined words will be sent to the
Bluetooth module.
Bluetooth communication was declared the code.
And for the Gesture based moving vehicle the
codewas written to take the x axis and y axis value
based on hand gestures and if conditions were written
based on these conditions the instruction was sent to
the receiver part through Zigbee module and this code
and uploaded into Arduino NANO (Transmitter).
And the other code was uploaded to another Arduino
NANO (Receiver) which had the code to initialize
and run the motor driver based on the instructions
given from transmitter.
7
RESULTS AND ANALYSIS
Fasten the moving vehicle with a smart glove and
control the straight forward and rotation of the car
from with hand gestures. The operation of the car is
always stable after many adjustments. Checking the
three-axis acceleration data and three-axis gyro data
by reading the MPU6050 in real time, and calculate
the Roll angle and Pitch angle through the built-in
filter algorithm. The system is then sent to Operation
and the 3D status of the MPU6050 is displayed in real
time in the serial monitor. By monitoring the angle of
the MPU6050, the angle of the MPU6050 can be kept
in real time and the 3D events of the MPU6050 can
be made. Seen by making an intuitive demo Interface.
We could see that the behavior at a given moment
when the MPU6050 rotates and the value of the
response angle is. It proves that there is no problem
with the MPU6050 module and that the character
angle can be calculated normally uses gesture
recognition technology, software and programming
to realize moving vehicle control.
In this control system, the gesture based moving
vehicle has good manoeuvrable ability handling and
stability, and can perform forward, backward, left
turn, right turn, etc. The tests were conducted as
shown in testing section and reanalysed that the as
specified the as expected, for the respective hand
gestures we got the respective words which we had
predefined and the Bluetooth module was sending the
text to the android mobile accurately and the
conversion of text to speech was done with accuracy.
ISPES 2023 - International Conference on Intelligent and Sustainable Power and Energy Systems
12

Fig 4.
WATER
TABLET
HELP
EMERGEN
CY
FRONT
BACK
Fig 5.
8 CONCLUSIONS
The inspiration behind this project are ideas that will
help solve the language problems of deaf and hearing
communities. Trying to translate these finger gestures
into words is just minutes away from this ultimate
goal. The vocalizer created by executes the steps
required by. This project uses as a prototype to check
the feasibility of, which uses the glove sensor to
recognize the gestures and convert the text received
through Bluetooth module and the predefined word
will be printed in the app and can be heard from the
mobile speaker. This gesture controlled moving
vehicle are designed to replace traditional remote
controls used to drive vehicles. It will allow us to
control forward and backward, left and right
movement while using the same sensor to control the
throttle of the vehicle as hand gestures. Since the hand
appears to be angled to the right, the robot moves in
the right direction. The vehicle is in stop mode as the
hand is still fixed to the environment. From testing,
about 80% of it worked as expected; the rest were less
due to background noise, being negative usage letters.
A motion- controlled robot offers a better way to
control the device. The commands given for the robot
to move in a certain direction in the environment are
based on gestures from the. Unlike existing systems,
the user can control the robot with hand gestures
without using external devices to support feedback
REFERENCES
Kadam, K., Rucha Ganu, Ankita Bhosekar, & Santa Ram
Joshi. (2012). American Sign Language Interpreter.
https://doi.org/10.1109/t4e.2012.45
Manandhar, S., Bajracharya, S., Karki, S., & Jha, A. K.
(2019). Hand Gesture Vocalizer for Dumb and Deaf
People. SCITECH Nepal, 14(1), 22–29.
https://doi.org/10.3126/scitech.v14i1.25530.
Manandhar, S., Bajracharya, S., Karki, S., & Jha, A. K.
(2019). Hand Gesture Vocalizer for Dumb and Deaf
Gesture Controlled Device with Vocalizer for Physically Challenged People
13

People. SCITECH Nepal, 14(1), 22–29.
https://doi.org/10.3126/scitech.v14i1.25530
Wu, X.-H., Su, M.-C., & Wang, P. (2010). A hand-gesture-
based control interface for a car-robot.
https://doi.org/10.1109/iros.2010.5650294
Alam, M., & Yousuf, M. A. (2019, February 1). Designing
and Implementation of a Wireless Gesture Controlled
Robot for Disabled and Elderly People. IEEE Xplore.
https://doi.org/10.1109/ECACE.2019.8679290
Kunjumon, J., & Megalingam, R. K. (2019). Hand Gesture
Recognition System For Translating Indian Sign
Language Into Text And Speech. 2019 International
Conference on Smart Systems and Inventive
Technology (ICSSIT).
ISPES 2023 - International Conference on Intelligent and Sustainable Power and Energy Systems
14
