
Study on Wire-Controlled Differential Steering of Hub-Driven
Four-Wheel Electric Vehicle
Jin Chen, Fenggang Han and Yao Lu
Xiamen University of Technology, Xiamen, China
Keywords: Hub-Driven, Electronic Differential, Wire-Controlled Steering, Motor Rotational Speed, Ackermann
Steering Model.
Abstract: In order to research the differential steering control method of the hub-driven electric vehicle, an
Ackermann differential steering model applicable to low-speed driving of four-wheel electric vehicles is
established. A permanent magnet synchronous motor model is established using a double closed-loop
control of rotational speed loop and current loop combined with SVPWM algorithm. At the same time, four
motor controllers are used to control the rotational speed of four driving motors respectively, achieving
differential steering. The differential steering control system is built and simulated in the
MATLAB/Simulink environment. The simulation results show that the adopted Ackermann differential
steering control system can meet the requirements of low-speed differential steering of four-wheel electric
vehicles. Meanwhile, the PI rotational speed control system can achieve adaptive tracking of the given
speed, effectively improving the safety and stability of the vehicle during rotational speed change.
1
INTRODUCTION
In recent years, hub-driven electric vehicles have
received widespread attention. The technological
advantage of hub-driven lies in the elimination of
components such as mechanical differential
clutches, transmissions, and drive shafts, which
improves the space utilization rate and transmission
efficiency, as well as the layout structure, chassis
integrated control, and execution flexibility (Li- Du,
Peng).
In the research of hub-driven electric vehicles,
the steering system is one of the research hotspots.
One of the problems that need to be solved for
electric vehicles driven by hub motors is the
synchronization and coordination of each wheel,
namely the differential steering problem (L. Jian-
Termous). The main approach to the solution is to
coordinate the rotational speed of each driving motor
through the vehicle controller, or to realize it
through a special motor (Yuan, 2022). This paper,
based on the low-speed characteristics of four-wheel
electric vehicles during steering, analyzes the
vehicle steering dynamics, establishes the
Ackermann differential steering model, and analyzes
the mathematical model of the vehicle drive motor
to construct a double closed-loop control system of
the drive motor. The differential model is combined
with the motor system, and the motor rotational
speed is coordinated and controlled, and it is verified
and analyzed on the Simulink simulation platform.
2
DIFFERENTIAL STEERING
MODEL
2.1 Design of Differential Steering
Model
For low-speed vehicles, the differential strategy
adopted is the electronic differential analysis model
proposed by Ackermann-Jeantand. The assumptions
of this model are: (1) the vehicle body is rigid; (2)
the wheels are pure rolling motion, and the tire slip
and slide running state are not considered; (3) the
lateral deformation and lateral force of the tire are
proportional, and the tire material and structural
nonlinearity and the impact of the centrifugal force
causing changes in the tire’s vertical load are not
considered. The designed differential steering model
is as shown in Fig. 1.
248
Chen, J., Han, F. and Lu, Y.
Study on Wire-Controlled Differential Steering of Hub-Driven Four- Wheel Electric Vehicle.
DOI: 10.5220/0012280200003807
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Seminar on Artificial Intelligence, Networking and Information Technology (ANIT 2023), pages 248-252
ISBN: 978-989-758-677-4
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
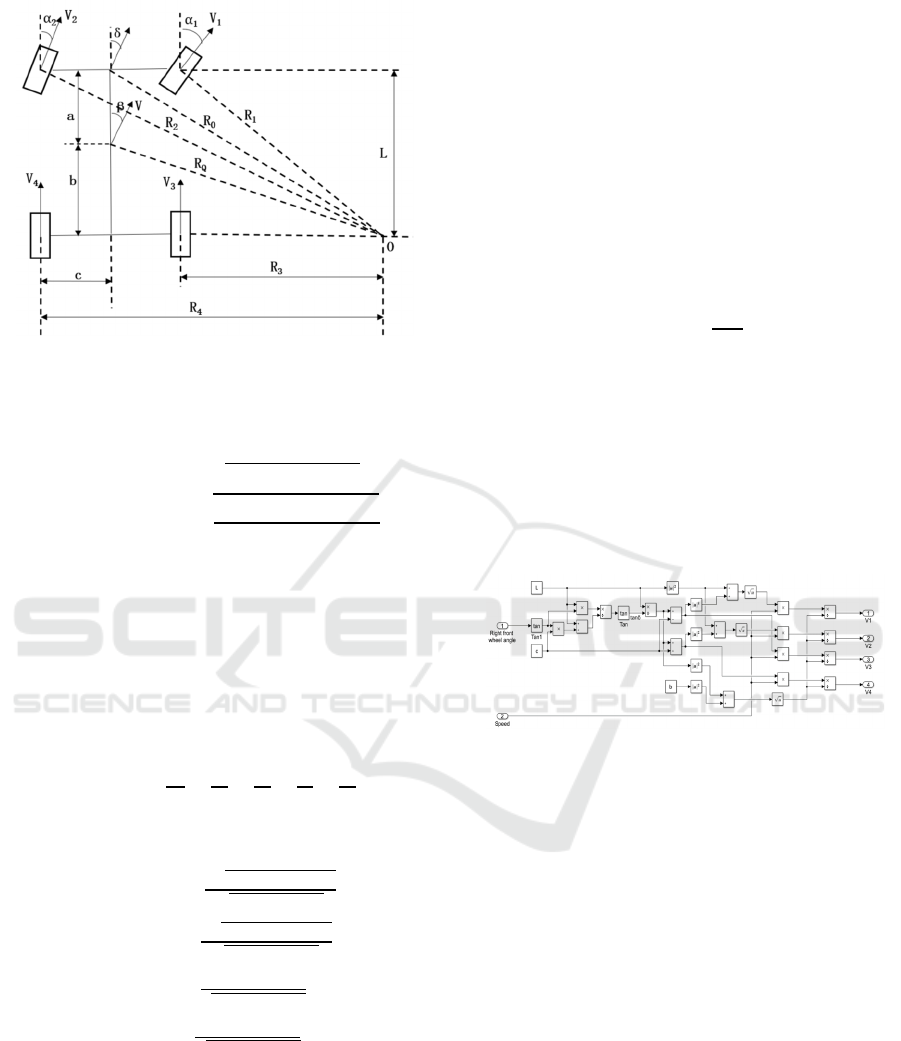
Figure 1: Differential Steering Model.
According to the Ackermann-Jeantand steering
model in Fig. 1, taking a right turn as an example,
we know from geometric relationships:
𝑅
𝑏
𝐿 tan 𝛿
⁄
(1)
𝑅
𝐿
𝐿 tan 𝛿
⁄
𝑐
(2)
𝑅
𝐿
𝐿 tan 𝛿
⁄
𝑐
(3)
𝑅
𝐿tan 𝛿
⁄
𝑐 (4)
𝑅
𝐿tan 𝛿
⁄
𝑐 (5)
From which we can get:
tan 𝛼
𝐿/𝐿 tan 𝛿
⁄
𝑐 (6)
Then we have:
tan 𝛿𝐿tan 𝛼
𝐿𝑐tan 𝛼
⁄
(7)
According to the Instantaneous Center of Rotation
(ICR) theorem, we know:
(8)
The longitudinal speeds of each wheel can be
obtained as:
𝑉
⁄
⁄
(9)
𝑉
⁄
⁄
(10)
𝑉
⁄
⁄
(11)
𝑉
⁄
⁄
(12)
Where V is the speed of the omnidirectional
electric chassis centroid, V
1
~V
4
are the longitudinal
motion speeds of each wheel respectively, L is the
wheelbase from the front axle and rear axle, c is half
of the track, a and b are the distances from the front
axle and rear axle to the vehicle centroid
respectively, R
1
~R
4
are the steering radii of each
wheel around the rotation center O respectively, R
Q
is the steering radius of the centroid around the
rotation center O, α
1
and α
2
are the steering angles of
the right front wheel and left front wheel
respectively, and δ is the vehicle’s Ackermann
steering angle.
2.2 Differential Steering Simulation
Model
The wheel speed is generally calculated from the
wheel rotational speed collected by the speed sensor.
The conversion formula from wheel speed to wheel
rotational speed is:
𝑣
(13)
Where v is the wheel speed, n is the wheel
rotational speed, and r is the radius of the tire.
According to the established mathematical
model of the electric vehicle’s differential steering, a
differential steering system simulation model is built
in the MATLAB/Simulink environment. As shown
in Fig. 2, the vehicle speed and the right front wheel
steering angle serve as inputs, with the speeds of all
four wheels as the output.
Figure 2: Ackermann Steering System Simulation Model.
3
PMSM MODEL BASED ON PI
ROTATIONAL SPEED
CONTROL
Due to the excellent startup performance of the
Permanent Magnet Synchronous Motor (PMSM),
along with its good reliability, high security, and
high efficiency during rated operation, it can well
meet the requirements of vehicle drive motors. In
addition, such motors also have features such as
light weight, small size, and low rotor heating rate.
Therefore, PMSM is selected as the subject for
control analysis.
3.1 PMSM Mathematical Model
Since the stator induced electromotive force of the
PMSM is a sine wave, the use of coordinate
Study on Wire-Controlled Differential Steering of Hub-Driven Four- Wheel Electric Vehicle
249
transformation theory is a relatively effective
analysis method. The motor in the actual operation
process will inevitably be affected by the actual
environment, causing changes in the motor’s
resistance and inductance. To simplify the analysis
process, the following assumptions are made: (1)
The motor air gap magnetic field is uniform and
sinusoidal, the winding resistance and inductance
values are constant; (2) Saturation effects of the
magnetic circuit are ignored; (3) Magnetic hysteresis
and eddy current losses are not considered; (4) The
influence of the stator slots is neglected.
The three-phase voltage equation of the PMSM
model under the three-phase stator ABC coordinate
system is:
𝑢
𝑢
𝑢
𝑟 00
0 𝑟 0
00𝑟
𝑖
𝑖
𝑖
𝜓
𝜓
𝜓
(14)
The mathematical model of the Permanent
Magnet Synchronous Motor established under the
synchronous rotating coordinate system is:
𝑢
𝑟𝑖
𝜔𝜓
𝑢
𝑟𝑖
𝜔𝜓
(15)
When the motor’s salient pole effect is not
considered, the magnetic linkage equation is:
𝜓
𝐿
𝑖
𝜓
𝜓
𝐿
𝑖
(16)
Using the principle of equal amplitude
transformation, the electromagnetic torque of the
Permanent Magnet Synchronous Motor is obtained:
𝑇
𝑛
𝜓
𝑖
𝐿
𝐿
𝑖
𝑖
(17)
The mechanical motion equation of the motor is:
𝑇
𝑇
𝐵𝜔
𝐽
𝜔
(18)
Where u
d
and u
q
are the voltages of the d and q
axes; id and i
q
are the currents of the d and q axes; n
p
is the number of pole pairs; ψ
d
and ψ
q
are the direct-
axis and quadrature-axis components of the stator
magnetic linkage; ψ
f
is the magnetic linkage; L
d
and
L
q
are the direct-axis and quadrature-axis
inductances; r is the phase resistance of the stator; T
L
is the load torque of the motor; ω
m
and ω are the
mechanical and electrical angular speeds of the
motor; B and J are the damping coefficient and
moment of inertia.
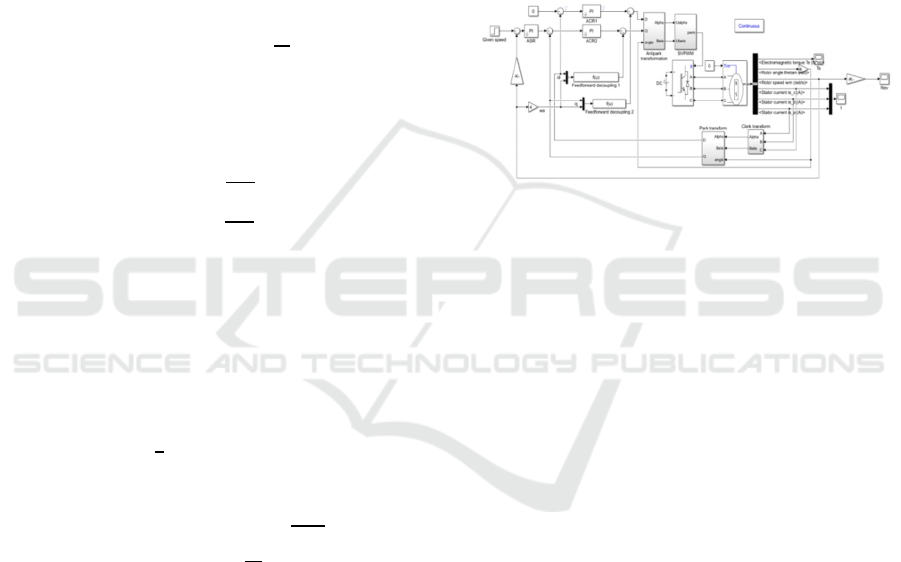
3.2 Motor Simulation Model
According to the PMSM mathematical model, a
motor control system is established using the
rotational speed loop PI controller and current loop
PI controller dual-loop control combined with the
Space Vector Pulse Width Modulation (SVPWM)
algorithm. Fig. 3 is the overall structure diagram of
the motor control system, mainly including the
rotational speed control module, current control
module, voltage inverter module, SVPWM
algorithm module, and so on. A motor system
simulation model is built in the MATLAB/Simulink
environment.
Figure 3: Motor Simulation Model.
4
DIFFERENTIAL CONTROL
METHOD BASED ON MOTOR
ROTATIONAL SPEED
According to the differential model, motor model,
and speed- rotational speed conversion model, a
differential steering control system is established.
The collected vehicle speed and steering angle are
used as variable inputs to the differential steering
model. Through the model calculation, the wheel
speeds of the four wheels are obtained and converted
into desired rotational speed via the speed-rotational
speed conversion model. Then we have to calculate
difference between the desired speed and the actual
rotational speed of the motor and then input the
value to the PI controller to control the operation of
each hub motor and drive the vehicle to steer. The
schematic diagram of the differential steering system
is shown in Fig. 4.
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
250
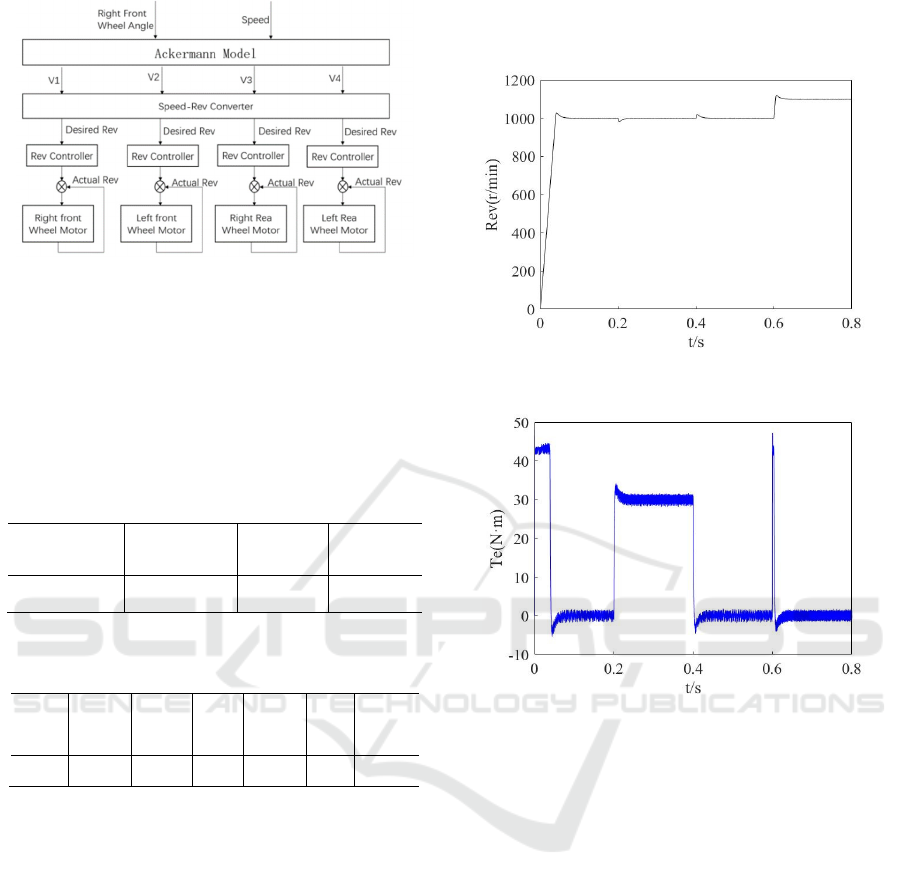
Figure 4: Differential Steering Control System.
5
SIMULATION RESULTS
ANALYSIS
The design parameters of the sample vehicle are as
shown in Table 1.
Table 1: Three Scheme comparing.
Parameter Name Wheelbase(m)
Tread
width(m)
Tire
radius(m)
Parameter Value 2.35 1.52 0.6
Motor parameters are as shown in Table 2.
Table 2: Three Scheme comparing.
Parameter
Name
Inductance
(H)
Resistance
(Ω)
Rotor
Flux
Linkage
(Wb)
Moment
of Inertia
(kg·m
2
)
Number
of Pole
Pairs
Damping
Coefficient
(N·m·s)
Parameter
Value
0.000835 0.11 0.1119 0.0016 4 0.0002024
5.1 Motor Performance Test
To verify whether the hub motor parameters can
meet various performance requirements, the
established motor system simulation model is tested
as follows: the initial load torque is set to zero, the
motor is started without load, the load is suddenly
added at 0.2s, and the load is removed at 0.4s; the
initial rotational speed is set to n=1000r/min, and at
0.6s, it is accelerated to n=1100r/min.
Simulation results show that when the motor
gradually accelerates from zero to the reference
rotational speed of 1000r/min, although there is an
overshoot, the response speed of the motor system is
fast, and the stability is relatively strong. It is evident
that the use of PI control rotational speed has strong
anti-interference capability and rapid adjustment
speed. Fig. 5 shows the rotational speed change
curve, Fig. 6 shows the electromagnetic torque
change curve.
Figure 5: Rotational Speed Change Curve.
Figure 6: Electromagnetic Torque Change Curve.
5.2 Differential Performance Test
Taking the right front wheel as an example, the
steering angle is set to 10°, the vehicle speed
v=10m/s, and a comparative test is carried out with
and without PI control. The simulation result is
shown in Fig. 7. The result shows that the right front
wheel with PI control has reduced the overshoot,
effectively weakening the overshoot phenomenon.
When a disturbance is added at t=0.3s, the right front
wheel’s rotational speed response time is short with
PI control, significantly enhancing the robustness of
the differential steering control system.
Study on Wire-Controlled Differential Steering of Hub-Driven Four- Wheel Electric Vehicle
251
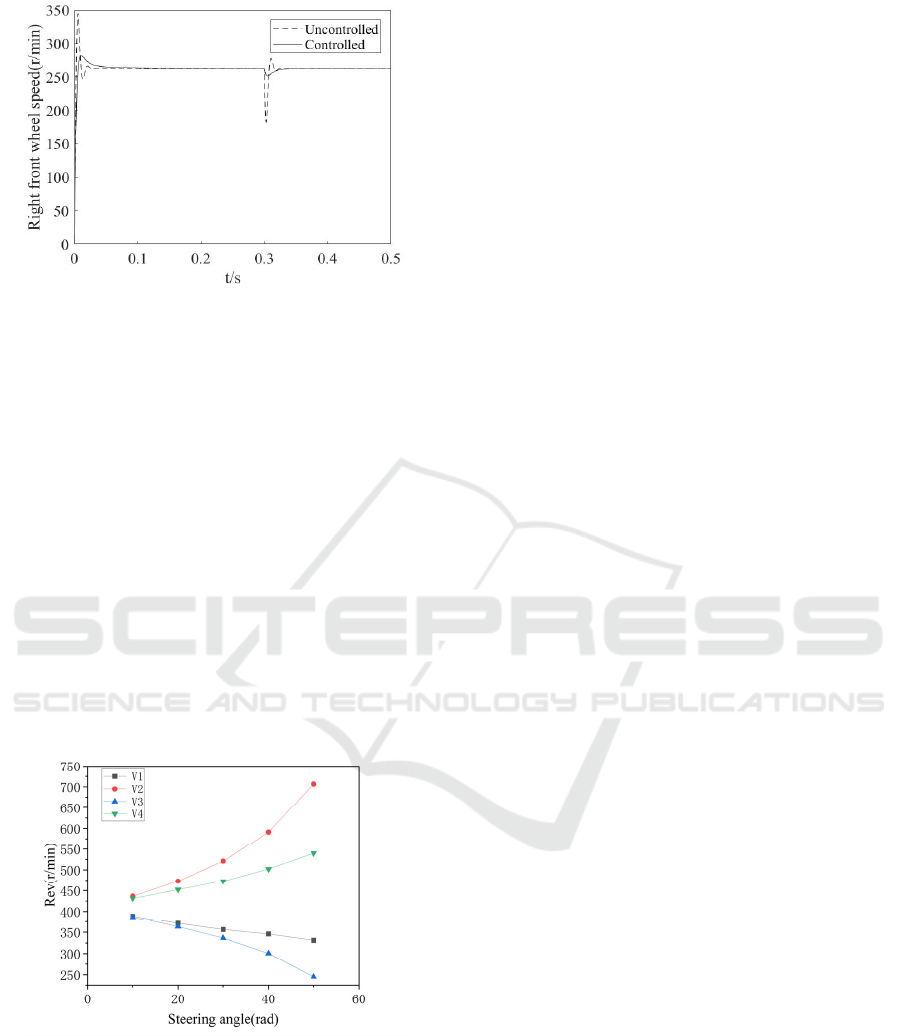
Figure 7: Comparison of control curves for the right front
wheel.
Given a lower driving speed of v=15m/s, the right
front wheel’s steering angle changes uniformly from
[0, 50]. The wheel rotational speeds are shown in
Fig. 8. Through simulation analysis, when the
vehicle is turning, the rotational speed of the outer
wheels is higher than the inner wheels, which is
consistent with the actual situation, verifying the
correctness of the differential steering control
system. As the steering angle changes continuously,
the vehicle controls the hub motors of each wheel to
achieve differential steering through the differential
steering system and always maintains the condition
that the rotational speed of the outer wheel is higher
than the inner wheel, verifying the feasibility of the
differential steering system controlling the vehicle’s
steering movement.
Figure 8: Curve of speed change of each wheel.
6
CONCLUSION
Hub-driven electric vehicles have shown many
advantages in economy and vehicle control and are
one of the future development directions of cars.
Differential steering technology is one of its
essential performance indicators, and the quality of
the differential steering system affects the stability
and smoothness of vehicle travel. Therefore,
continuous exploration of differential steering is
essential.
This paper takes the hub-driven four-wheel
electric vehicle as the research object, establishes a
differential steering control system suitable for low-
speed steering, and verifies and analyzes this system
in the Simulink simulation platform. The results
show that the constructed permanent magnet
synchronous motor system has strong robustness.
The established steering control system can fully
meet the differential requirements, enhancing the
stability and security of the vehicle when steering.
This system is simple and practical and has some
reference value for future research on differential
steering systems.
REFERENCES
X. Li and R. Wang, “The future trends of in-wheel motors
for electric vehicles,” 2011 International Conference
on Consumer Electronics, Communications and
Networks (CECNet), Xianning, China, 2011, pp. 5390-
5393 https://doi.org/10.1109/CECNET.2011.5768782
Khan, Muhammad Arshad, Aftab, Muhammad Faisal,
Ahmed, Ejaz, et al. Robust Differential Steering
Control System for an Independent Four Wheel Drive
Electric Vehicle. International Journal of Automotive
Technology, 2019,20(1):87-97 https://doi.org/10.1007
/s12239-019-0008-9
Du, Peng, Ma, Zhongmin, Chen, Hao, et al. Speed-
adaptive motion control algorithm for differential
steering vehicle. Proceedings of the Institution of
Mechanical Engineers, Part D. Journal of Automobile
Engineering,2021,235(2/3):672-685 https://doi.org/10.
1177/0954407020950588
L. Jian, “Research Status and Development Prospect of
Electric Vehicles Based on Hub Motor,” 2018 China
International Conference on Electricity Distribution
(CICED), Tianjin, China, 2018, pp. 126-129
https://doi.org/10.1109/CICED.2018.8592598
Termous, Hussein, Shraim, Hassan, Talj, Reine, et al.
Coordinated control strategies for active steering,
differential braking and active suspension for vehicle
stability, handling and safety improvement. Vehicle
System Dynamics: International Journal of Vehicle
Mechanics and Mobility,2019,57(10/12):1494-1529
https://doi.org/10.1080/00423114.2018.1521001
W. Yuan and L. Xun, “Research on differential steering
control of an articulated steering vehicle via fuzzy-PID
control,” 2022 IEEE 4th International Conference on
Power, Intelligent Computing and Systems (ICPICS),
Shenyang, China, 2022, pp. 867-872 https://doi.org/
10.1109/ICPICS55264.2022.9873569
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
252
