
A Knowledge Layer in Data-Centric Architectures in the Automotive
Industry
Haonan Qiu, Adel Ayara and Christian Muehlbauer
BMW Group, Germany
Keywords:
Knowledge Representation, Reasoning, Data-Centric Architecture, Automotive Industry.
Abstract:
As the automotive industry continues its evolution towards connected and autonomous vehicles, the need to
adopt a data-centric architecture for providing sophisticated driving functions increasing important. Compared
to traditional application-centric architecture, data-enteric architecture allows the collection, aggregation and
analysis of data from various sources. However, such architecture lack of inference capability makes it not
leverage the full potential of established AI technologies such as knowledge representation and reasoning. In
this work, it is our goal to investigate how we can incorporate a knowledge layer in a data centric architecture
that allows reasoning and thus support decision making. A prototype is implemented and deployed in both
vehicle and backend, and the feasibility is evaluated through a real-world experiment.
1 INTRODUCTION
In 1977, the first production car that deployed a
small piece of software was the General Motors
Oldsmobile Toronado which had an Electronic Con-
trol Unit (ECU) that managed electronic spark tim-
ing Bereisa (1983). The first software-based solutions
were purely local, functionally and technically iso-
lated, and had no connections between them. These
independent and unconnected pieces of software used
to run on a single dedicated ECU. Applications were
created in machine code directly, with a minimal
amount of abstraction used.
Therefore, ECUs designed for specific tasks,
along with their sensors and actuators, formed the ba-
sic architecture of vehicles. In the early 1990s, ECUs
started to communicate with each other and were thus
able to exchange data. As a consequence, the automo-
tive industry started to introduce functions distributed
over several ECUs, connected by bus systems as the
underlying communication infrastructure. Software
coupled with ECUs is increasing as the need arises. In
less than 50 years, the amount of software has evolved
from zero to hundreds of millions of lines of code
1
.
Besides the software complexity, the current ve-
hicle architecture results in isolated data processing,
and the value gained from data during execution re-
mains within the application. This architectural ap-
1
https://spectrum.ieee.org/software-eating-car
proach is sometimes referred to as an application-
centric architecture, wherein each application uses its
own schema to modify and transmit data based on its
specific requirements. However, this design choice
results in the process logic being tightly coupled with
the application, leading to challenges in long-term
maintenance (McComb, 2018). Additionally, mod-
ern vehicles generate vast amounts of data from vari-
ous sources, such as sensors and cameras. According
to the the calculation reported in (Wright, 2023), the
sensors in an autonomous vehicle record between 1.4
terabytes (TB) and around 19 TB per hour. This big
volume of heterogeneous data presents yet another
challenge to an application-centric approach’s ability
to effectively process and extract valuable insights.
To address the aforementioned issue, there is
a shift from application-centric approaches to data-
centric approaches (Alvarez-Coello et al., 2021). It
focuses on improving the vehicle data architecture,
which plays a crucial role in supporting the advance-
ment of the automotive industry in the upcoming
decade, particularly in terms of connected vehicles,
autonomous systems, and shared mobility. With a
focus on a data-centric perspective, the authors of
(Alvarez-Coello et al., 2021) outline a data archi-
tecture based on the well-known Data, Information,
Knowledge, Wisdom (DIKW) hierarchy.
This paper is a continuation of work done in
(Alvarez-Coello et al., 2021), aiming to propose a
knowledge layer within the data-centric architecture
296
Qiu, H., Ayara, A. and Muehlbauer, C.
A Knowledge Layer in Data-Centric Architectures in the Automotive Industry.
DOI: 10.5220/0012255000003598
In Proceedings of the 15th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2023) - Volume 2: KEOD, pages 296-303
ISBN: 978-989-758-671-2; ISSN: 2184-3228
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

that applies Semantic Web technologies. The main
contributions are as follows:
– We propose a knowledge layer based on
OWL 2 RL ontologies (Hitzler et al., 2009), Dat-
alog rules (Abiteboul et al., 1995), and SPARQL
queries (W3C SPARQL Working Group, 2013),
to deal with both knowledge abstraction and
decision-making.
– We propose a generic approach for exchanging
messages between the information layer and the
knowledge layer.
– We present an application scenario with designed
ontologies and rules for the proposed architecture.
– We evaluate the proposed architecture and de-
ployed it in both the car and the backend with a
real-world experiment.
The remainder of this paper is organized as fol-
lows: Section 2 presents related works. In Section 3,
we present the proposed architecture, and Section 4
describes the application scenario. In Section 5, we
evaluate the approach with a real-world experiment.
Section 6 concludes the paper.
2 RELATED WORK
In this section, we provide existing works about three
areas whose intersection this work resides in: data-
centric approaches, ontologies, and reasoning in au-
tomotive industry.
Data-centric. The key characteristic of a data-centric
architecture is that the data are the central asset and
their storage and governance are the first steps of
the process, which precede the creation of any ap-
plication or service. Nakamoto et al. (2014) pro-
pose an IoT-based data-centric software architecture
using a data stream management system for all sen-
sors, so that downstream application can get rele-
vant data as required. Kugele et al. (2018) pro-
pose a data-centric communication based on publish-
subscribe mechanism, focusing on data rather than ac-
tions. They also propose to use containerization tech-
niques for portability and continuous integration and
delivery. Yun et al. (2017) propose an architect in-
cluding data-centric middleware for the digital twin
platform. None of the aforementioned studies ad-
dressed the integration of a knowledge layer provid-
ing knowledge abstraction and reasoning capability
on top of data. Nevertheless, their research efforts
have laid the groundwork for this paper.
Ontologies. Ontologies have been applied in theau-
tonomous industry and related fields. Based on the
VSS and the Sensor, Observation, Sample and Actu-
ator (SOSA) ontology(Janowicz et al., 2019), Klotz
et al. (2018a) create an ontology for vehicle sig-
nals and sensors named VSS ontology (VSSo) (Klotz
et al., 2018b). It is used in combination with the STEP
ontology (Nogueira et al., 2018), an extension of a
geo-ontology in (Hu et al., 2013), to map car trajec-
tories using the ontology’s vocabulary and label the
segments as “smooth” or “not smooth” based accel-
eration range. Alvarez-Coello and G
´
omez (2021) use
an ontology-based on approach to combine vehicle-
related data and label the application-specific data
with semantics such that queries that are stable over
time, application-specific data can be reused, and
more semantics are possible. The limitation of the
described approaches is that reasoning is not incorpo-
rated.
Reasoning. Work aimed at enabling vehicles’ situa-
tion awareness and decision-makings exits in the liter-
ature. Armand et al. (2014) propose reasoning using
rules for providing context awareness to driving assis-
tant systems so that the vehicle can perform human-
like reasoning about its surroundings using map data
and sensor data. Buechel et al. (2017) focus on the
traffic scene modelling with decision-making rules
derived from traffic regulations. Similarly, the ap-
proach proposed by Zhao et al. (2017) also uses rules
to encode traffic rules, with the difference that the sen-
sor data is treated as RDF streams. However, vehicle
signal data is not included in any of the studies.
3 APPROACH
In this section, we describe the proposed overall ar-
chitecture, followed by a detailed explanation of the
knowledge layer.
3.1 Architecture
Figure 1Conceptual architecture. shows the proposed
architecture in accordance with the DIKW hierarchy
(Rowley, 2007). In this architecture, content flows
generally from bottom to top, and the higher the data
is represented in the hierarchy, the more explicit con-
text will be immediately accessible for future use.
The data layer represents the raw data from differ-
ent sources, such as vehicle boardnet signals, data in
the cloud, or data on mobile devices.
The information layer comprises organized data
following the defined schemas, like Vehicle Signal
Specification (VSS) (Klotz et al., 2018b) and Person
Data Model (PDM). The PDM contains information
about drivers and passengers in a variety of driving
A Knowledge Layer in Data-Centric Architectures in the Automotive Industry
297
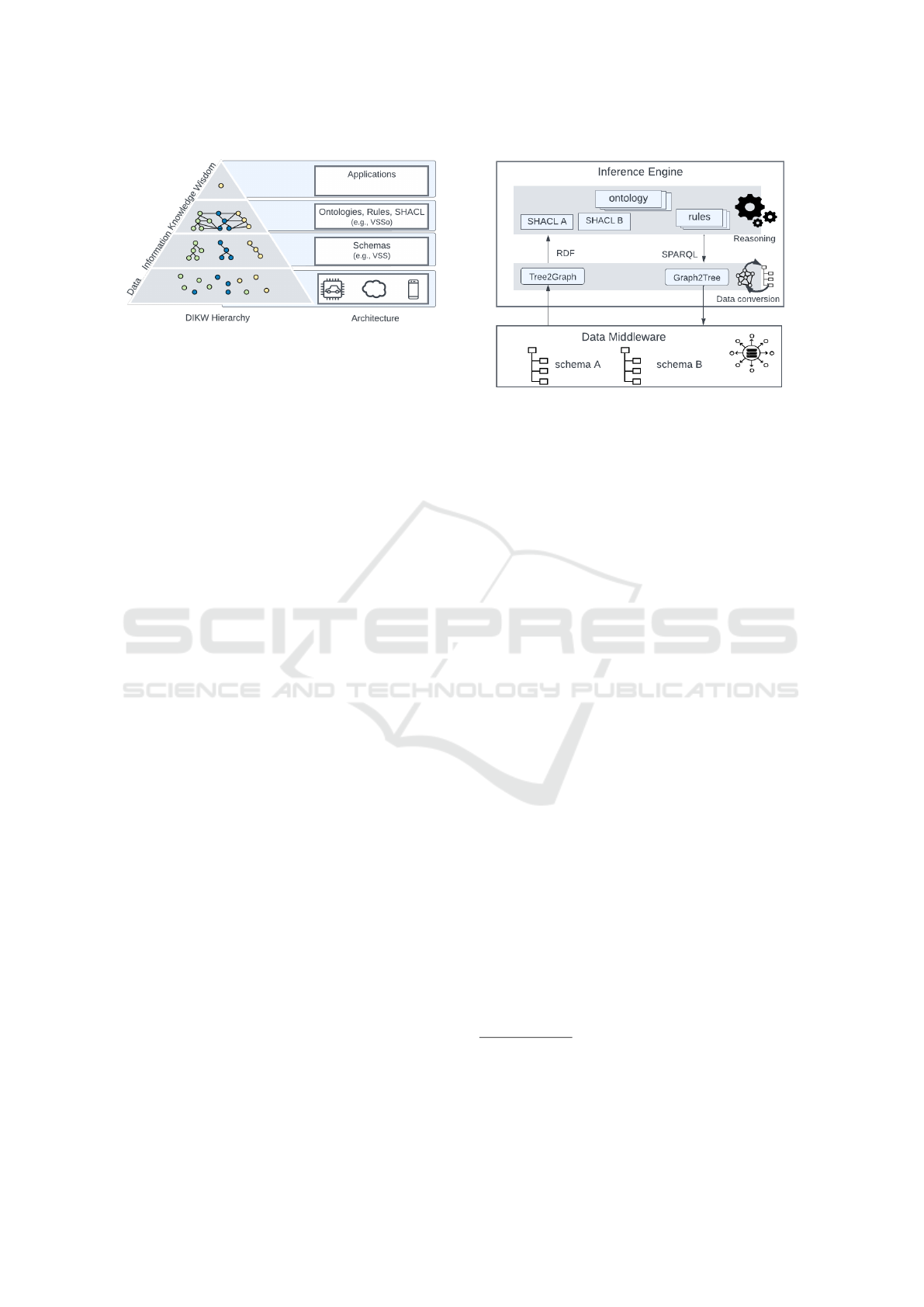
Figure 1: Conceptual architecture.
situations. The schemas within this layer take the
form of a tree-structured taxonomy, serving as direct
interfaces for retrieving structured data. In this layer,
data middleware technologies can be used to trans-
form unstructured data streams into structured data
based on a suitable data schema and to synchronize
data across multiple components.
The knowledge layer contains ontologies from
different domains and makes it possible to integrate
heterogeneous sources such as the Vehicle Signal
Specification ontology (Vsso) and the Person Data
Model ontology (PDMo). Together with background
ontologies, the rules in this layer serve as input for
the reasoner to perform tasks such as semantic enrich-
ment, knowledge abstraction, and context reasoning
for decision-making. Shapes Constraint Language
(SHACL) files not only define constraints that vali-
date and shape the structure of data (Knublauch and
Kontokostas, 2020), but also serve as a bridge be-
tween the schema used in the information layer and
the terminologies of the ontology used in the knowl-
edge layer (Taelman et al., 2019).
The wisdom layer refers to the phase in which
knowledge derived from the previous layer is used for
making strategic decisions and generating actionable
knowledge. From this point, it is possible to develop
use-case-specific applications that query the insights
through the knowledge layer and execute the corre-
sponding actions.
3.2 Knowledge Layer
The knowledge layer has two primary responsibili-
ties: data conversion and reasoning. We encapsulate
this task into a component named Inference Engine as
shown in Figure 2Inference engine..
3.2.1 Data Conversion
Data conversion is the process of transforming
data that is formatted according to a tree-structured
schema in the information layer into RDF graph
Figure 2: Inference engine.
val:Person a s h : NodeS h a p e ;
sch:name " Person " ;
sh: t a r g e t C l a s s ont:Person ;
sh:proper t y [
sch:name " p r i v a t e Ad d r e s s ";
sh:node v a l : P r i v a te A d d r e s s ;
sh:path o n t : h a s P r i v a t e A d d r e s s ;
sh:class ont:P r i v a t e A d d r e s s ;
sh:maxCou n t 1;
].
Listing 1: An example of SHACL definition.
data that is defined by classes and properties from
the ontology in the knowledge layer, and vice versa.
The SHACL files define the correspondence between
the shape, schema and the ontology, thereby serving
as a bridge between the information layer and the
knowledge layer. Specially, sch:name
2
maps the
SHACL shapes to the elements in the tree-structured
schema, sh:targetClass
3
or sh:class maps the SHACL
shapes to the ontology classes, and sh:path maps
to the ontology object property or data property.
The ontology entities are prefixed with ont
4
(see
Listing 1).
Tree2Graph. The values of “sch:name:” are mapped
to the elements in the schema name. For example,
Person, privateAddress, City are mapped to the ele-
ments in the name Person.privateAddress.City from a
message shown in Listing 2. With this mapping, the
corresponding ontology classes and properties are
retrieved using a SPARQL query with the input1 and
input2 replaced by the two consecutive elements from
the message’s name (see Listing 3). The SPARQL
2
prefix sch: <http://groupontology.bmwgroup.net/bmw-
sch#>
3
prefix sh: <http://www.w3.org/ns/shacl#>
4
prefix ont: <http://groupontology.bmwgroup.net/bmw-
ont# >
KEOD 2023 - 15th International Conference on Knowledge Engineering and Ontology Development
298
query is executed n − 1 times if n is the number
of the elements in the message name and n > 1.
The RDF triples then can be generated using the
query result including the class, object property and
data property and the value from the original message.
{
" name ": " P e rson . p r i v at e A d d r e s s . C ity " ,
" value ": " M u n ich "
}
Listing 2: The message recived from the information layer.
SELECT ? c1 ? op ? dp ? c2
WHERE {? S s c h : n a m e input 1 ;
sh: t a r g e t C l a s s ? c1 ;
{? S sh:property [
sch:name in p u t2 ; s h : p a th ? op ; s h : c l a s s
? c2 ].
}UNION{? S s h : p r o p e r t y [
sch:name in p u t2 ;
sh:path ? dp ; s h : d a t a t ype ? dt ].}
}
Listing 3: SPARQL query for retrieving ontology classes
and properties.
Graph2Tree. The conclusion drawn by the reasoner
must be synchronized with the other components and
cloud storage. This is accomplished by returning the
inference to the information layer, where the data
middleware resides. By retrieving inferences through
SPARQL queries as variable names are formatted
based on the schema, the query result can be con-
verted to messages whose name is the query variable
and whose value is the query variable’s value. List-
ing 4 shows the generated message based on the query
result. The message name Person.jobAddress.Street is
from the query variable name. The conversion is in
generic form, making the method independent of par-
ticular data messages.
{
" name ": " P e r son . j o b A d d r e s s . S t r eet " ,
" value ":" H a r dtweg "
}
Listing 4: The message sent to information layer.
3.2.2 Reasoning
Reasoning plays a central role in our architecture. In
the next section, an application scenario is used to il-
lustrate reasoning abilities such as knowledge abstrac-
tion and context reasoning.
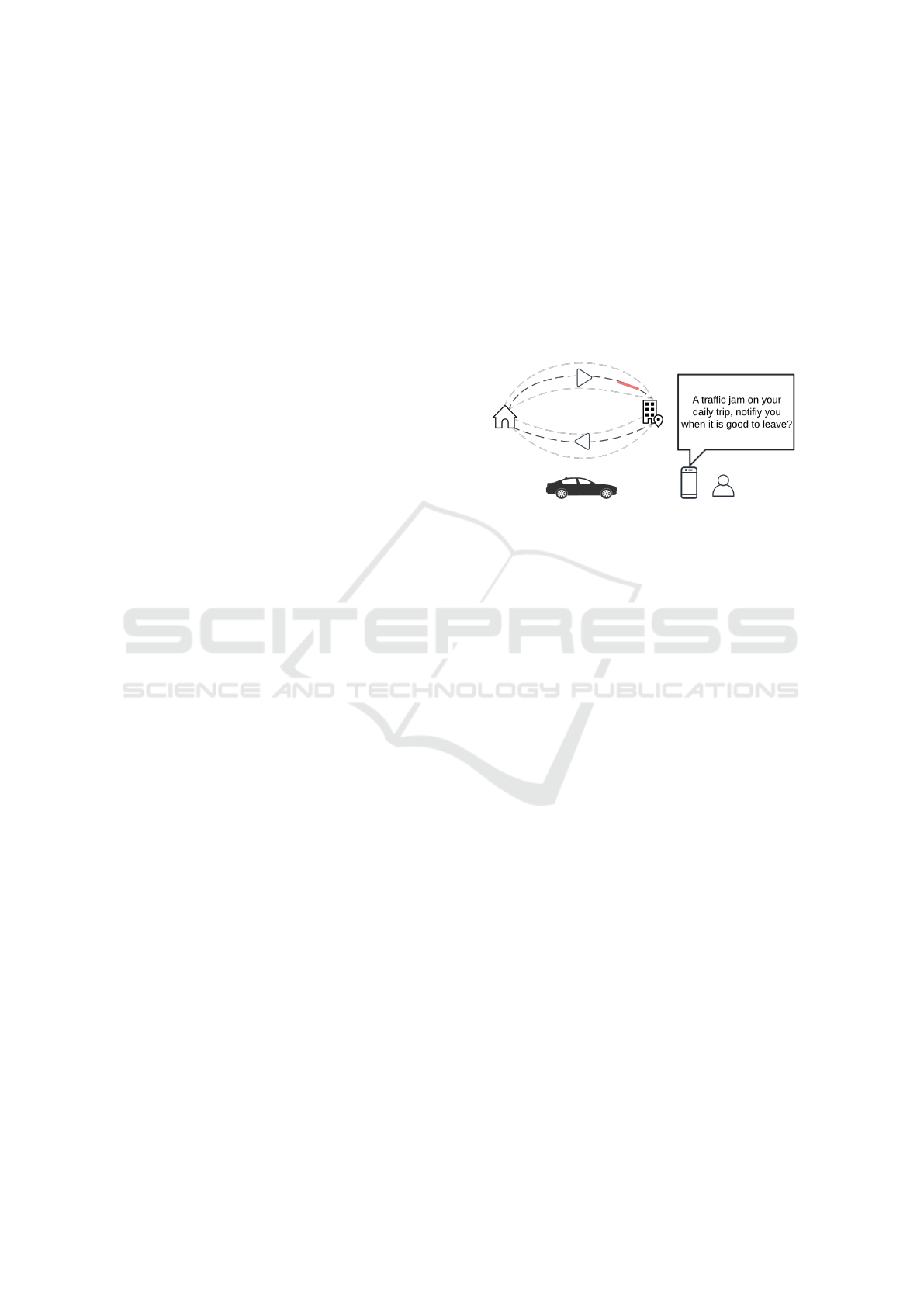
4 APPLICATION
In this section, we describe the application scenario
shown in Figure 3Application scenario.. Drivers typi-
cally travel between their home and their place of em-
ployment or another frequently visited location on a
regular basis. A daily driving pattern can be inferred
from past trips. Together with the commuter’s pri-
vate address and traffic information in the backend,
the commuter will receive a business address sugges-
tion and traffic congestion notification.
Figure 3: Application scenario.
4.1 Ontologies
Figure 4Core concepts of the ontological model.
shows the overview of the designed ontology with
modules: the Daily User Trip ontology (DUTo), the
Person Data Model ontology (PDMo), the Vehicle
Signal Ontology (VSSo) and the High-level Map on-
tology (HLMo).
• DUTo represents the daily user trip of the vehicle,
reusing partial content from the Geo-ontology de-
sign pattern (Hu et al., 2013). DailyUserTrip is the
main concept that describes the path on which a
vehicle travels over time. It may have more than
one Segment if the vehicle stopped at multiple lo-
cations during the journey. A Segment has a start-
ing Fix and an ending Fix. A Fix is defined as a
point {latitude, longitude} with a timestamp in-
dicating the position of a moving object at an in-
stant of time. A TrafficJam may happen on some
RoadParts within a period of time, thus affecting
the corresponding DailyUserTrip.
• VSSo is used to represent vehicle signals (Klotz
et al., 2018b). We reused CurrentLocation and
DrivingSatus.CurrentLocation describes the received
GPS position at each timestamp. The DrivingSta-
tus indicates the mode of vehicle motion, such as
standby, driving, or engine-off.
• PDMo describes the person in the context of the
driving scenario, such as the driver or passenger.
A Person owns Vehicles, and can have a Busines-
sAddress and a PrivateAddress. The location of the
A Knowledge Layer in Data-Centric Architectures in the Automotive Industry
299
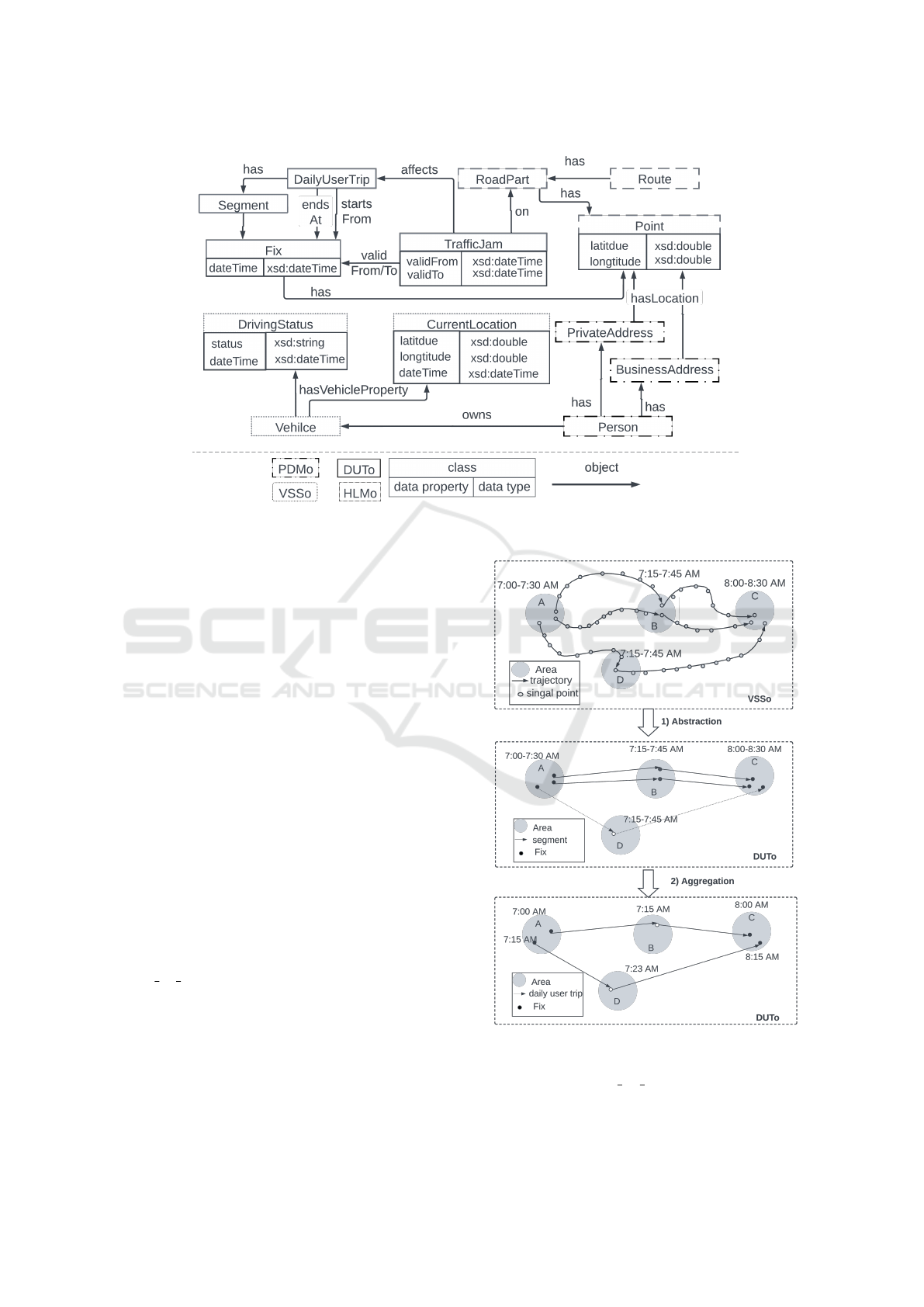
Figure 4: Core concepts of the ontological model.
address is described by a Point.
• HDLM describes the high-level map knowledge
(Qiu et al., 2020). We reused the concepts of Road,
Route and Point to represent navigational informa-
tion. A Route consists of some RoadPart, and the
geometry of each RoadPart is described by some
Point with coordinates.
4.2 Rules
The Datalog rules are used to infer daily user trips,
suggest user business address, and decide whether the
traffic jams affect the daily user trips. In detail, the
daily user trips are derived from vehicle signal data
streams through two steps: 1) abstraction and 2) ag-
gregation (see Figure 5Inference flow for the daily
user trips.).
1) Abstraction. Vehicle signal data streams repre-
sented by VSSo instances are incrementally abstracted
to the instances of Fix, Segment and DailyUserTrip in
DUTo respectively. We further divide Fix into Start-
Fix and EndFix, two subclasses representing the start
and end fixes of a trip. If the DrivingStatus is ”
Ready To Drive”, the instance of StartFix are derived
as follows:
StartFix( f ), dateTime( f , d), hasLocation( f , p),
Point(p), latitude(p, m), longitude(p, n) ←
Vehilce(v), hasVehilceProperty(v, c),
CurrentLocation(c), dateTime(c, d),
latitude(c, m), longitude(c, n)
hasVehilceProperty(v, ds), DrivingStatus(ds),
Figure 5: Inference flow for the daily user trips.
statue(ds, ”Ready To Drive”), dateTime(ds, d),
BIND(SKOLEM(" f ", d) as f ),
KEOD 2023 - 15th International Conference on Knowledge Engineering and Ontology Development
300
BIND(SKOLEM("p", d) as p).
As vehicle signal data streams arrive, the instances of
Segment are inferred incrementally based on the cor-
responding StartFix instance and the EndFix instance.:
Segment(s), startsFrom(s, f
3
),
endsAt(s, f
2
) ←
EndFix( f
2
),
AGGREGATE(dateTime( f
2
, d
2
),
StartFix( f
1
), dateTime( f
1
, d
1
),
sameDate(d
2
, d
1
), FITLER(d
2
> d
1
)
ON f
2
BIND MAX(d
1
) AS d
max
),
hasLocation( f
2
), p
2
), dateTime( f
2
), d
3
),
StartFix( f
3
), hasLocation( f
3
), p
3
),
dateTime( f
3
), d
max
), sameDate(d
3
, d
max
),
NOT sameArea(p
2
, p
3
),
BIND(SKOLEM(”s”, d
max
, d
3
)).
2) Aggregation. The similar segments are aggregated
into a representative segment, which will be part of
the inferred daily user trip. If the StartFix and EndFix
of two Segment are located in the same area, and the
starting time and ending time fall within 30-minute
range, then the relationship isSimilarTo is derived as
follows:
isSimilarTo(m
1
, m
2
) ←
Segment(m
1
), startsFrom(m
1
, o
1
),
dateTime(o
1
, s
1
)hasLocation(o
1
,t
1
),
endsAt(m
1
, p
1
), dateTime(p
1
, e
1
),
hasLocation(p
1
, u
1
), Segment(m
2
),
startsFrom(m
2
, o
2
), dateTime(o
2
, s
2
),
hasLocation(o
2
,t
2
), endsAt(m
2
, p
2
),
dateTime(p
2
, e
2
), hasLocation(p
2
, u
2
),
sameArea(t
1
,t
2
), sameArea(u
1
, u
2
)
NOT sameDate(s
1
, s
2
),
FILTER(ABS(s
1
−s
2
) ≤ 30 && ABS(e
1
−e
2
) ≤ 30).
The isSimilarTo has properties of symmetry, reflexivity,
and transitivity to ensure all inferences about this re-
lationship among Segments are made. The daily user
trip can be derived by aggregating the segments that
are in isSimilarTo relationship. We define the daily user
as the trip comprising segments with the earliest start
among all segments that are related by insSimilarTo.
5 IMPLEMENTATION AND
EVALUATION
This section presents the implementation of the pro-
posed architecture and the evaluation of the applica-
tion scenario through a real-world experiment.
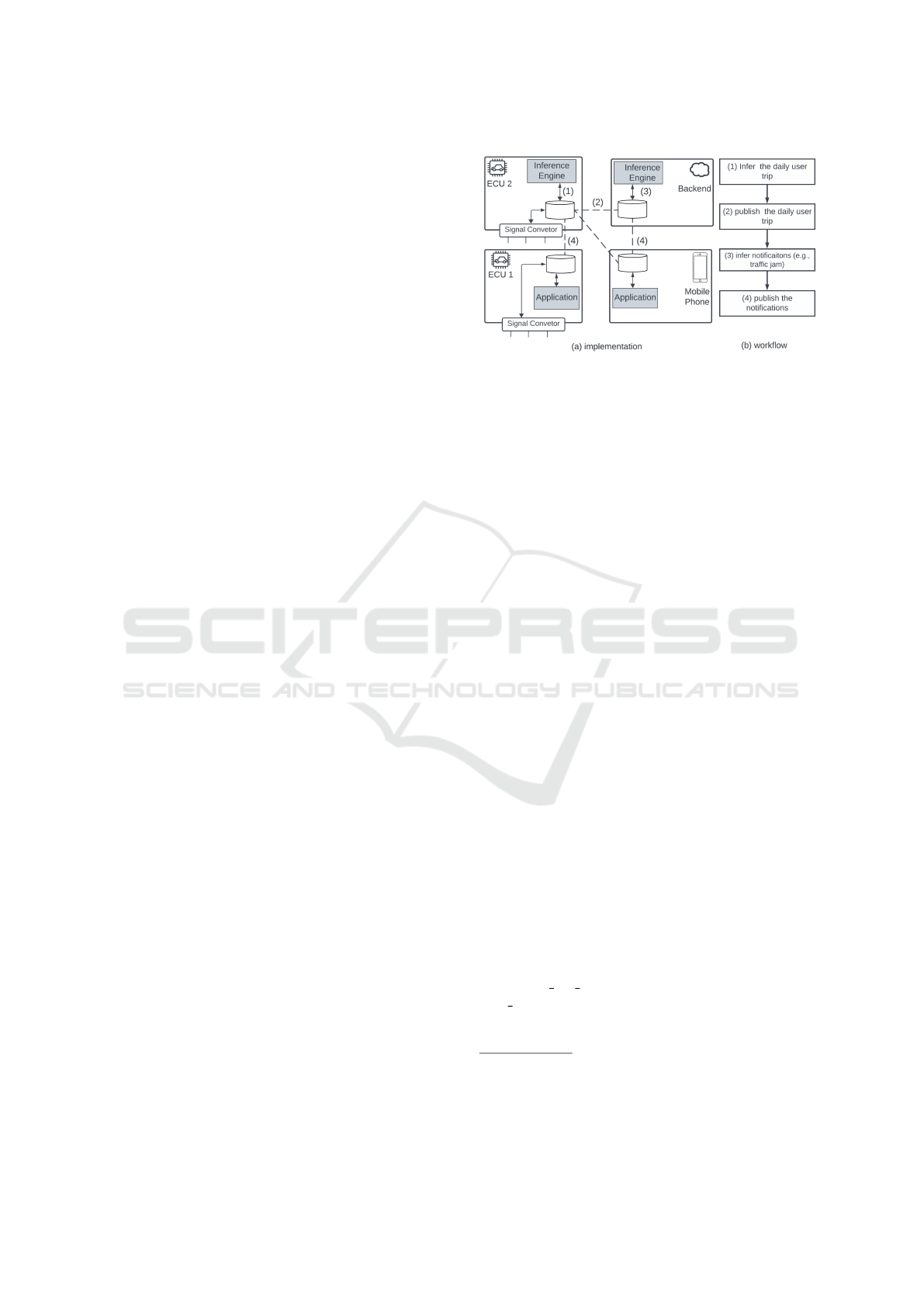
Figure 6: Overview of implementation.
5.1 Implementation
We have implemented the inference engine in C++
using RDFox 6.0 APIs
5
for importing dynamic data,
reasoning and querying the inference result. The in-
ference engine is deployed both in the vehicle and on
the cloud along with a data middleware solution pro-
vided by MongoDB
6
as shown in Figure 6Overview
of implementation.a. The inference result can be vi-
sualized through the font-end application deployed
on the vehicle and the mobile phone. The workflow
with the main steps are shown in Figure 6Overview
of implementation.b. The Nominatim search API
7
is
used to search OpenStreetMap (OSM) data for coor-
dinates by address and addresses for a given coordi-
nate.
5.2 Real-World Experiment
To evaluate whether our approach works in real-time,
we conducted tests with the intelligent vehicle BMW
iX on the route shown in Figure 7Experiment area..
The vehicle is equipped with a computer on which
the data middleware and the implemented inference
engine are deployed. Four experimental journeys
have been conducted between A (BMW Research
and Technology House) and B (Hardtweg 22, 85748
Garching).
5.2.1 Data
In-vehicle. Table 1An example of transmitted
sensor data in a trip. Status {5=STANDBY,
8=READY TO DRIVE, 10=DRIVING, 12=DRIV-
ING END}. shows the vehicle signal data for one trip,
which is transmitted in real-time to the data middle-
ware, and later published to the inference engine. At
5
https://docs.oxfordsemantic.tech/6.0/welcome-to-
rdfox.html
6
https://www.mongodb.com/
7
https://nominatim.org/release-docs/latest/api/Search/
A Knowledge Layer in Data-Centric Architectures in the Automotive Industry
301

Figure 7: Experiment area.
Table 1: An example of transmitted sensor data in a trip.
Status {5=STANDBY, 8=READY TO DRIVE, 10=DRIV-
ING, 12=DRIVING END}.
timestamp latitude longitude status
1693320978 48.251581 11.637744 5
1693321169 48.251581 11.637744 8
1692774450 48.251581 11.637744 10
...
1692774648 48.249755 11.63980 12
each timestamp, the sensor data transmitter sends data
of latitude, longitude, and car driving status. The
vehicle signal data is converted into RDF data via
Tree2Graph using the VSSo ontology.
Backend. We configured the private address of the
driver as A’s address and simulated the traffic jam in-
formation with valid duration and location specified
on the path of the experimental area (see Figure 7Ex-
periment area.).
5.2.2 Result
Table 2Inferred daily user trips from the vehicle.
shows the inferred two daily user trips in total. Each
time a new daily user trip is derived, a SPARQL query
is executed to retrieve the corresponding result, which
is then transmitted back to the data middleware. Af-
ter the daily user trip is transmitted to the backend
inference engine, it is able to identify the occurrence
of a traffic jam event. Subsequently, a notification is
generated and transmitted to the user’s mobile phone
application, where it is displayed. Also, the business
address is deduced and the user is prompted to save it
in the system to his personal profile (see Figure 8No-
tifications from the mobile phone.).
Table 2: Inferred daily user trips from the vehicle.
DailyUserTrip
(1) (2)
startTime 14:59:30 15:02:52
startLocation 48.251581 48.249582
11.637744 48.249582
endTime 15:02:45Z 15:04:08Z
endLocation 48.2495822 48.2515647
11.639152 11.637710
Figure 8: Notifications from the mobile phone.
6 CONCLUSION AND FUTURE
WORK
In this paper, we propose a knowledge layer that
is designed for data-centric architecture in the au-
tomotive industry using Semantic Web technologies.
The technologies enable the integration of diverse do-
main ontologies, facilitate knowledge abstraction, and
provide reasoning capabilities to support decision-
making processes. We presented the mechanism to
perform generic data conversion between the infor-
mation layer and the knowledge layer. We explain an
application scenario that utilizes the proposed archi-
tecture and present the designed ontology and rules.
The rules can be reused because the underlying ontol-
ogy is adapted from well-defined ontologies. Further-
more, we have developed a prototype using APIs from
RDFox. The prototype was successfully deployed in
both the vehicle and the backend. The proposed ap-
proach was then evaluated through a real-world ex-
periment. The results demonstrate the feasibility of
adopting a knowledge layer using Semantic Web tech-
nologies for abstracting knowledge from vehicle data
streams and providing insights for decision-making.
KEOD 2023 - 15th International Conference on Knowledge Engineering and Ontology Development
302

Furthermore, the results indicate that the application
within the knowledge layer can be placed in either
the vehicle or the backend, leaving computational re-
sources and data transmission costs as the primary
factors impacting the decision of its deployment site.
In future work, we intend to evaluate the approach
with more use cases by adding only ontologies and
rules to show the scalability of the proposed archi-
tecture and to look into best practises. Additionally,
we plan to extend the knowledge layer by including
machine learning techniques for obtaining further in-
sights from vehicle-related data and investigating how
machine learning and reasoning can work together.
REFERENCES
Abiteboul, S., Hull, R., and Vianu, V. (1995). Foundations
of databases, volume 8.
Alvarez-Coello, D. and G
´
omez, J. M. (2021). Ontology-
based integration of vehicle-related data. In 2021
IEEE 15th International Conference on Semantic
Computing (ICSC), pages 437–442.
Alvarez-Coello, D., Wilms, D., Bekan, A., and G
´
omez,
J. M. (2021). Towards a data-centric architecture in
the automotive industry. Procedia Computer Science,
181:658–663.
Armand, A., Filliat, D., and Iba
˜
nez-Guzman, J. (2014).
Ontology-based context awareness for driving assis-
tance systems. In 2014 IEEE intelligent vehicles sym-
posium proceedings, pages 227–233. IEEE.
Bereisa, J. (1983). Applications of microcomputers in auto-
motive electronics. IEEE Transactions on Industrial
Electronics, IE-30:87–96.
Buechel, M., Hinz, G., Ruehl, F., Schroth, H., Gyoeri,
C., and Knoll, A. (2017). Ontology-based traffic
scene modeling, traffic regulations dependent situa-
tional awareness and decision-making for automated
vehicles. In 2017 IEEE Intelligent Vehicles Sympo-
sium (IV), pages 1471–1476. IEEE.
Hitzler, P., Kr
¨
otzsch, M., Parsia, B., Patel-Schneider, P. F.,
and Rudolph, S. (27 Oct 2009). OWL 2 Web Ontology
Language: Primer (2nd Edition).
Hu, Y., Janowicz, K., Carral, D., Scheider, S., Kuhn, W.,
Berg-Cross, G., Hitzler, P., Dean, M., and Kolas,
D. (2013). A geo-ontology design pattern for se-
mantic trajectories. In Spatial Information Theory:
11th International Conference, COSIT 2013, Scar-
borough, UK, September 2-6, 2013. Proceedings 11,
pages 438–456. Springer.
Janowicz, K., Haller, A., Cox, S. J., Le Phuoc, D., and
Lefranc¸ois, M. (2019). Sosa: A lightweight ontol-
ogy for sensors, observations, samples, and actuators.
Journal of Web Semantics, 56:1–10.
Klotz, B., Troncy, R., Wilms, D., and Bonnet, C. (2018a).
Generating semantic trajectories using a car signal on-
tology. In Companion Proceedings of the The Web
Conference 2018, pages 135–138.
Klotz, B., Troncy, R., Wilms, D., and Bonnet, C. (2018b).
Vsso: The vehicle signal and attribute ontology. In
SSN@ ISWC, pages 56–63.
Knublauch, H. and Kontokostas, D. (2020). Shapes con-
straint language (shacl). (Accessed on 08/08/2023).
Kugele, S., Hettler, D., and Peter, J. (2018). Data-centric
communication and containerization for future auto-
motive software architectures. In 2018 IEEE Inter-
national Conference on Software Architecture (ICSA),
pages 65–6509. IEEE.
McComb, D. (2018). SOFTWARE WASTELAND: how
the application-centric mindset is hobbling our enter-
prises. Technics Publications.
Nakamoto, Y., Yamaguchi, A., Sato, K., Honda, S., and
Takada, H. (2014). Toward data-centric software
architecture for automotive systems-embedded data
stream processing approach. In 2014 IEEE 11th Intl
Conf on Ubiquitous Intelligence and Computing and
2014 IEEE 11th Intl Conf on Autonomic and Trusted
Computing and 2014 IEEE 14th Intl Conf on Scalable
Computing and Communications and Its Associated
Workshops, pages 586–589. IEEE.
Nogueira, T. P., Braga, R. B., de Oliveira, C. T., and Martin,
H. (2018). Framestep: A framework for annotating se-
mantic trajectories based on episodes. Expert Systems
with Applications, 92:533–545.
Qiu, H., Ayara, A., and Glimm, B. (2020). Ontology-based
processing of dynamic maps in automated driving. In
KEOD, pages 98–107.
Rowley, J. (2007). The wisdom hierarchy: representations
of the dikw hierarchy. Journal of information science,
33(2):163–180.
Taelman, R., Vander Sande, M., and Verborgh, R. (2019).
Bridges between graphql and rdf. In W3C Workshop
on Web Standardization for Graph Data. W3C.
W3C SPARQL Working Group (21 Mar 2013). SPARQL
1.1 Overview.
Wright, S. (accessed on 2 July 2023). Autonomous cars
generate more than 300 TB of data per year.
Yun, S., Park, J.-H., and Kim, W.-T. (2017). Data-centric
middleware based digital twin platform for depend-
able cyber-physical systems. In 2017 ninth interna-
tional conference on ubiquitous and future networks
(ICUFN), pages 922–926. IEEE.
Zhao, L., Ichise, R., Liu, Z., Mita, S., and Sasaki,
Y. (2017). Ontology-based driving decision mak-
ing: A feasibility study at uncontrolled intersec-
tions. IEICE Transactions on Information and Sys-
tems, E100.D(7):1425–1439.
A Knowledge Layer in Data-Centric Architectures in the Automotive Industry
303
