
Hand-Drawn Diagram Correction Using Machine Learning
Tenga Yoshida
1 a
and Hiroyuki Kobayashi
2 b
1
Graduate School of Robotics and Design, Osaka Institute of Technology, Osaka, Japan
2
Department of System Design, Osaka Institute of Technology, Osaka, Japan
Keywords:
Machine Learning, Hand-Drawn Diagram, Time Series Data.
Abstract:
This paper introduces a real-time correction technique for hand-drawn diagrams on tablets, leveraging machine
learning to mitigate inaccuracies caused by hand tremors. A novel fusion of classification and regression mod-
els is proposed; initially, the classification model discerns the geometric shape being drawn, aiding the regres-
sion model in making precise corrective predictions during the drawing process. Additionally, a unique Mean
Angle of Vector (MAV) loss function is introduced to minimize angle changes in vectors formed by consec-
utive points, thereby reducing hand tremors especially in straight line segments. The MAV function not only
facilitates real-time corrections but also preserves the drawing fluidity, enhancing user satisfaction. Experi-
mental results highlight improved correction accuracy, particularly when employing classification alongside
regression. However, the MAV function may round off sharp corners, indicating areas for further refinement.
This work paves the way for more intuitive and user-friendly digital sketching and diagramming applications.
1 INTRODUCTION
Hand-drawn diagrams on tablet devices are recog-
nized as intuitive and convenient. However, a greater
susceptibility to shakes is observed compared to tradi-
tional paper-based drawing. As a result, various hand-
shake correction methods have been developed. One
notable method that has been employed is the mov-
ing average process. In this method, the output point
is computed from the moving average of the preced-
ing and subsequent n steps for the input point at time
t. Advanced methods, wherein the filter size n is ad-
justed based on the path’s curvature, have also been
introduced (Kawase et al., 2012). Predictions can be
made using past coordinate data by these methods, but
the prediction of specific shapes remains a challenge.
Moreover, in applications designed for the correc-
tion of hand-drawn figures, the shape is typically clas-
sified after being drawn, and corrections are then ap-
plied. This approach ensures that geometric figures
are drawn without imperfections such as shakes or
blurs. However, pauses in prediction are often intro-
duced, leading to a less fluid drawing experience.
In the realm of hand-drawn diagram correction,
most existing methods have been centered around
bitmap images. The novelty of this research lies in
a
https://orcid.org/0009-0002-2766-1493
b
https://orcid.org/0000-0002-4110-3570
leveraging vector data for real-time correction, a facet
that has not been extensively explored before. This
vector-based approach is anticipated to offer better
accuracy and efficiency in correcting hand-drawn di-
agrams on digital mediums.
In response to the challenges aforementioned, it
was recognized that online hand-drawn figures can be
treated as time series data. A proposal has been made
to utilize machine learning for real-time regressive
path predictions, allowing corrections to be made dur-
ing the drawing process. This research further aims to
enhance correction accuracy by introducing concur-
rent classification prediction. This allows the regres-
sion prediction model to adapt based on the type of
figure drawn.
2 RELATED WORK
Up to now, numerous applications of machine learn-
ing to hand-drawn data, often utilizing datasets like
MNIST, have been reported. Distinct from these stud-
ies that rely on bitmap images, the present research
is characterized by its emphasis on vector images for
correction.
When attention is given to the correction of hand-
drawn figures and time series prediction, several per-
tinent studies can be identified.
346
Yoshida, T. and Kobayashi, H.
Hand-Drawn Diagram Correction Using Machine Learning.
DOI: 10.5220/0012239300003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 346-351
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
2.1 Sketch-RNN
Sketch-RNN, a model based on a recurrent neural net-
work, was developed by (Ha and Eck, 2017). This
model captures the movement of the pen as time se-
ries data and is capable of generating new sketches
accordingly. The concept behind Sketch-RNN has
been extended in the current research to address
real-time figure correction. While the Sketch-RNN
methodology employs both Long Short-Term Mem-
ory (LSTM)(Hochreiter and Schmidhuber, 1997) and
Variational Autoencoder (VAE) for time series predic-
tion, only the LSTM, deemed essential for time series
prediction, is utilized in this study.
2.2 Multivariate Time Series
Transformer
Conversely, a novel framework for multivariate
time series representation learning, based on the
transformer encoder architecture, was proposed by
(Zerveas et al., 2021) in their study titled “A
Transformer-based Framework for Multivariate Time
Series Representation Learning”. This framework in-
corporates an unsupervised pre-training scheme and
has been shown to offer significant performance ad-
vantages for supervised learning by leveraging exist-
ing data samples. In the present research, time se-
ries data of two variables, x and y coordinates, is
employed, aligning perfectly with the aforementioned
framework and task. Although it has not been adopted
in this iteration, the framework holds potential value
for the current study.
3 THEORY
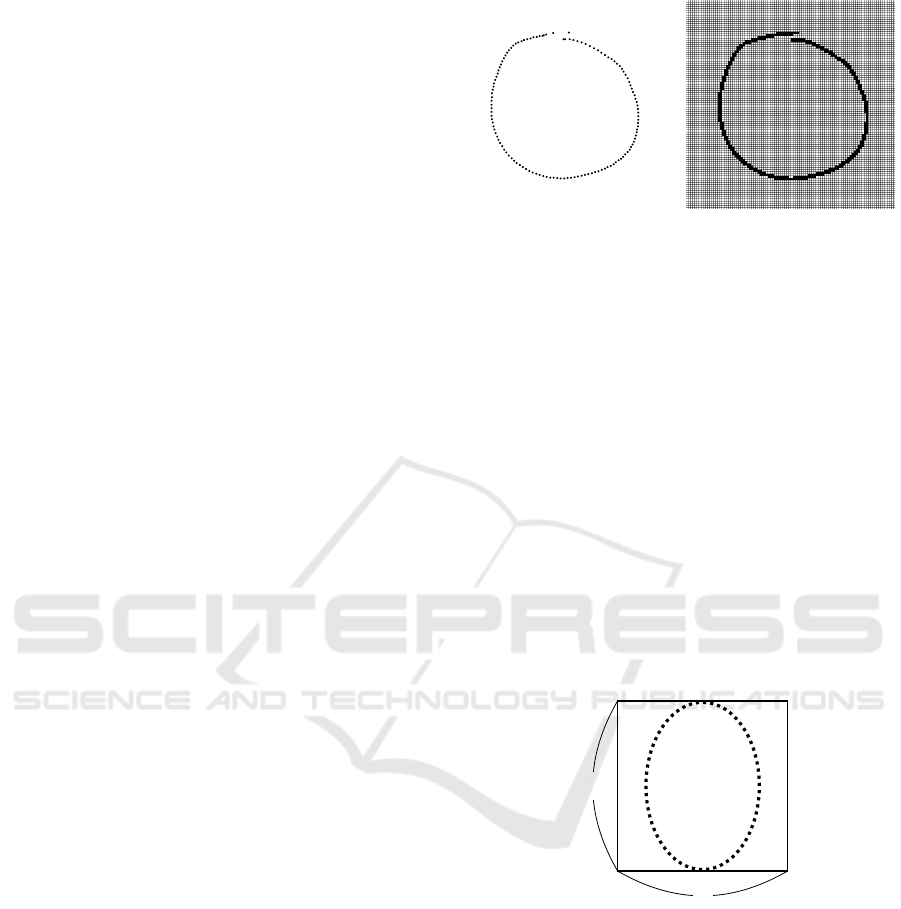
3.1 Online Patterns and Offline Patterns
Hand-drawn figure patterns can be categorized into
online patterns and offline patterns (Zhu and Naka-
gawa, 2012). Online patterns, as depicted in Fig-
ure 1a, are comprised of time series pen point co-
ordinate data, referred to here as paths. Conversely,
offline patterns, shown in Figure 1b, are made up of
pixel value data from a single image. In this study,
we utilize data from hand-drawn figures consisting of
online patterns.
3.2 Normalization
Variability in size due to feature values may cause
larger features to disproportionately influence the re-
sult, independent of their weights. The figures in
(a) Online Pattern. (b) Offline Pattern.
Figure 1: Examples of online and offline patterns.
this study also demonstrate size variations, with each
time’s coordinates (or vectors) used as the feature
values. Consequently, merely shifting the same fig-
ure (changing its position) might impact the compu-
tational outcome.
For offline patterns, normalization can be
achieved by dividing each pixel value by its maxi-
mum. However, this approach does not suit the on-
line patterns utilized here. It neither addresses the is-
sue of different figure positions nor prevents changes
in the aspect ratio. Therefore, we employ normaliza-
tion using a bounding box. This box, illustrated in
Figure 2, represents the smallest square enclosing the
figure. Paths are shifted so that the figure box’s top-
left corner aligns with the origin, and all points are
normalized to lie between 0 and 1 by dividing by the
box’s length l.
l
l
Figure 2: A Example of Bounding Box.
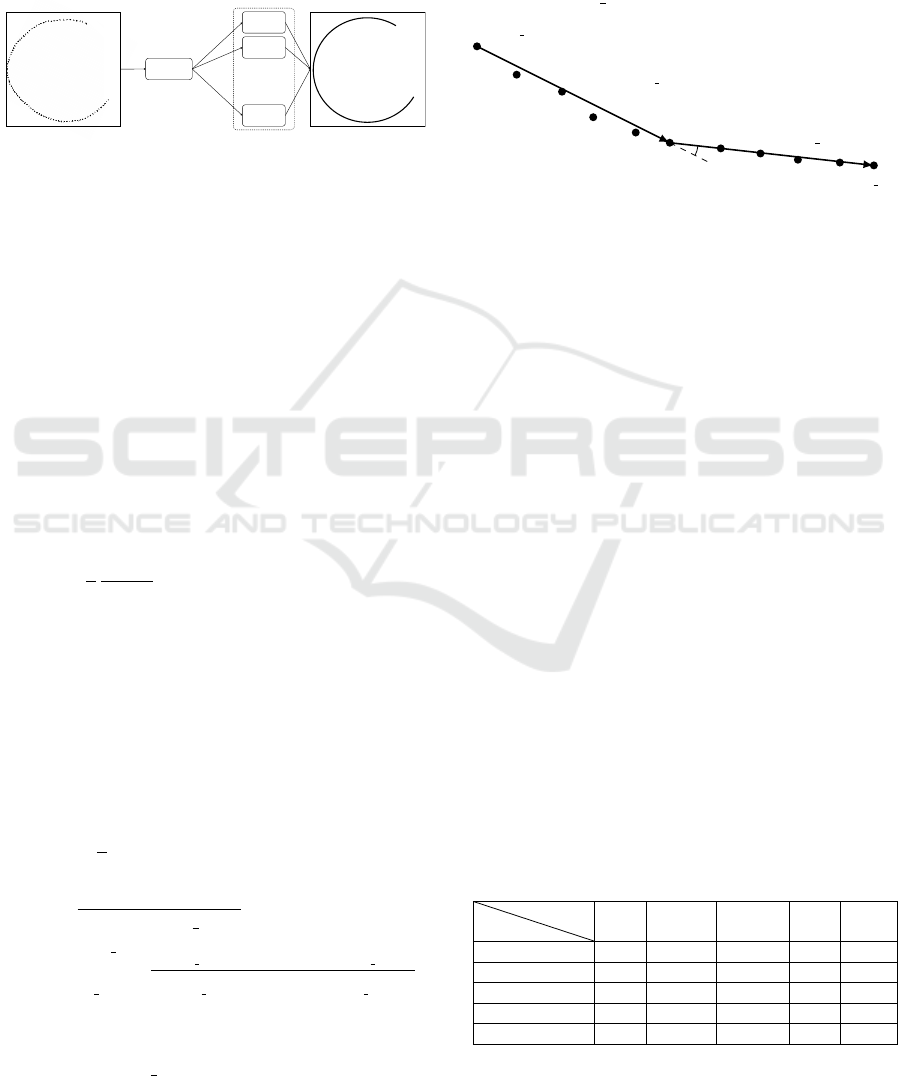
3.3 Correction Method
Correction of hand-drawn paths involves predicting
these paths using a machine learning model. This
model comprises two components: a classification
model and a regression model. The correction pro-
cess unfolds as follows:
1. The classification model predicts what type of fig-
ure the online pattern of the hand-drawn figure is.
2. The path of the hand-drawn figure is passed to the
regression prediction model suitable for the type
predicted by the classification model.
Hand-Drawn Diagram Correction Using Machine Learning
347
3. The regression prediction model predicts the cor-
rected path from the path of the hand-drawn fig-
ure.
4. Repeat steps 1 to 3.
The models’ input and output images are portrayed in
Figure 3.
Input
Classication
Model
For Triangle
For Line
For Ellipse
︙
Output
Regression Model
Figure 3: Classification and regression model.
To enable real-time predictions during writing, the
machine learning model must receive inputs of con-
sistent array lengths. This necessitates data shap-
ing into x, y coordinates with an array length of 512,
meaning the model accepts inputs in the format 512×
2. Linear interpolation is employed during the data
shaping phase. Training utilizes data from five fig-
ure types: straight line, triangle, square, circle, and
ellipse.
3.4 Loss Function
In previous studies (Yoshida and Kobayashi, 2022),
the Mean Square Error (MSE) was used as the loss
function given by
MSE =
1
n
1
length
n
∑
i=1
length
∑
t=0
p
prediction
t+i
− p
teacher
t+i
2
.
(1)
This is to bring the handwritten path closer to the
teacher path at each time. In contrast, this study intro-
duces a new loss function. Until now, there has been
no quantitative evaluation indicator for the standing.
Therefore, it was decided to incorporate the change
in the angle of the vector at each time into the loss
function. This loss is named Mean Angle of Vector
(MAV) in this study, and is represented by
MAV = γ ·
1
n
n
∑
i=1
cos
−1
(COS) (2)
COS =
1
length − 2 × n steps
×
length−n steps
∑
t=n steps
(p
t+n steps
− p
t
) · (p
t
− p
t−n steps
)
p
t+n steps
− p
t
p
t
− p
t−n steps
.
(3)
MAV takes the difference of the vectors of the points
before and after n steps, and calculates their angles
based on the inner product. In other words, it is equiv-
alent to finding θ as shown in Figure 4. By applying
MAV only to prediction, it minimizes the change in
the angle at each point and suppresses hand shaking.
γ is the weight of MAV, and it was set to 0.001 in the
loss during training. MAV is an indicator of shaking,
and MAV is also used as metrics, but in that case, γ is
set to 1. Also, n steps was set to 5.
p
t−n steps
p
t
p
t+n steps
p
t
− p
t−n steps
p
t+n steps
− p
t
θ
Figure 4: The angle of the vector at each time.
The final loss is the sum of MAV and MSE, repre-
sented by Eq. (4).
Loss = MSE + MAV (4)
4 EXPERIMENT
4.1 Classification Model
First, we conducted experiments with the classifica-
tion model alone. We predicted the type of data after
10% of the path array length (for data of length 100,
this is from time 10 onwards). The accuracy of this
model was about 33%.
Predictions were then made for data after 50% of
the path array length, and the accuracy achieved was
about 60%.
Predictions made after 80% of the path array
length yielded an accuracy of about 76%.
Additionally, we made predictions using only the
final path, which refers to the completed figure. The
accuracy for this approach was about 97.2%. The de-
tailed breakdown can be seen in Table 1. It’s evident
that the accuracy of the classification model increases
as it approaches the end of the drawing.
Table 1: Classification results.
IN
OUT
line
tri-
angle
rect-
angle
circle ellipse
line 929 0 1 0 0
triangle 0 972 2 0 2
rectangle 0 1 918 0 4
circle 0 0 2 909 25
ellipse 0 0 3 121 787
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
348
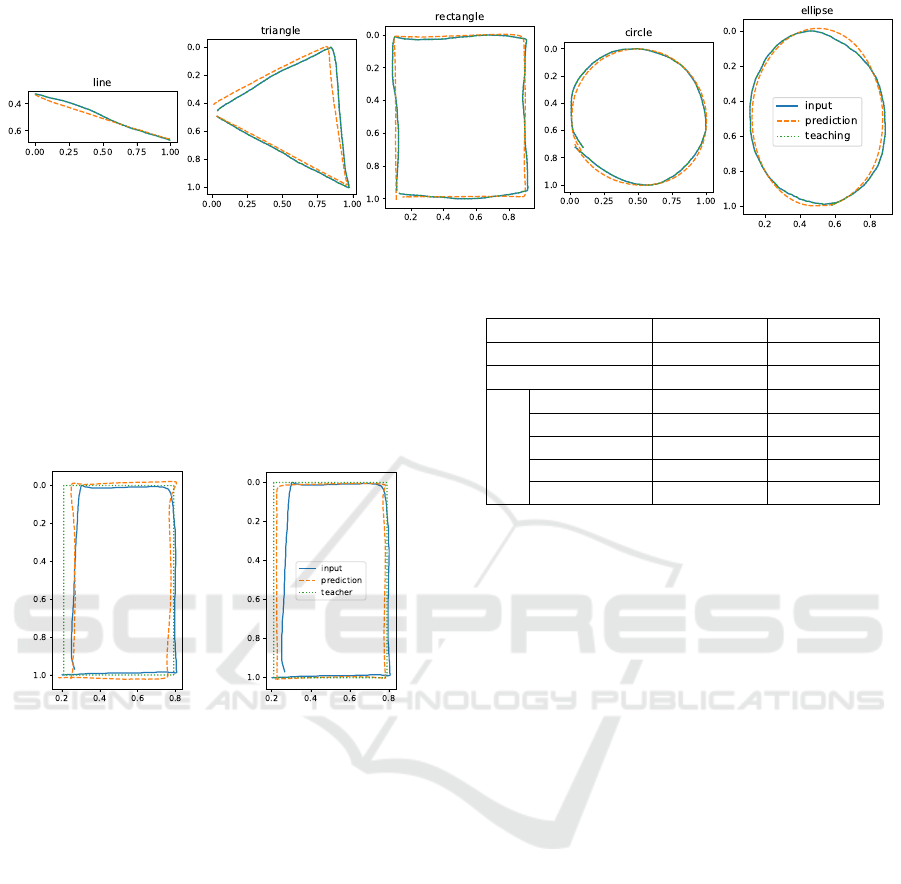
Figure 5: Results of combining classification and regression models.
4.2 Combined Use of Classification and
Regression Models
The results from combining the classification and re-
gression models are presented in Figure 5.
Comparisons of results with and without classifi-
cation can be viewed in Figure 6.
(a) Without classification. (b) With classification.
Figure 6: Comparison of results with and without classifi-
cation.
4.3 Loss Using MAV
The results using the loss with MAV are depicted in
Figure 7. These were obtained exclusively with the
regression model, without the inclusion of the classi-
fication model.
The following figure, Figure 8, compares the cor-
rection results obtained using MAV and those using
MSE only.
A zoomed-in version focusing on the straight line
from Figure 8(i) is presented in Figure 9.
Similarly, a zoomed-in version focusing on the
corner from Figure 8(ii) is presented in Figure 10.
Lastly, Table 2 presents the MAV and MSE val-
ues when validation data is fed into each respective
model. The “Base Model” here represents a model
without classification prediction and without training
using MAV.
Table 2: Classification results.
Model type MSE MAV [rad]
Base Model 1.2310e-04 0.2852
Model with MAV 9.5786e-05 0.1490
With classify
line 1.6718e-04 0.6486
triangle 3.2093e-04 0.2167
rectangle 1.0126e-04 0.2381
circle 4.0689e-04 0.1630
ellipse 2.9909e-04 0.3540
5 DISCUSSION
Also, in the task of classification only, the accuracy
increased as it approached the end of the drawing.
This is thought to be because the figure is accurately
formed as the drawing progresses, which enabled ac-
curate classification. However, in the prediction while
drawing, it is necessary to increase the accuracy from
the beginning of the drawing, and this low accuracy
at the beginning of the drawing will become a bottle-
neck.
Looking at Figure 6, it can be seen that a closer
correction result to the teacher path is obtained when
classification is performed than when it is not per-
formed. This confirmed that the correction accuracy
improved by performing classification. However, for
each regression prediction model, there is a tendency
for overfitting, and it is believed that generality has
been lost.
Next, looking at the results using the loss function
with MAV, it is not significantly improved as seen in
Figure 8. However, looking at Figures 9 and 10, it
can be seen that the hand tremor is reduced in each.
However, looking at Figure 10, it can be seen that the
corners are rounded when using MAV. This is thought
to be because the corners are rounded by suppressing
the change in angle at each time. In other words, this
method is thought to have a similar effect to the mov-
ing average method.
Hand-Drawn Diagram Correction Using Machine Learning
349
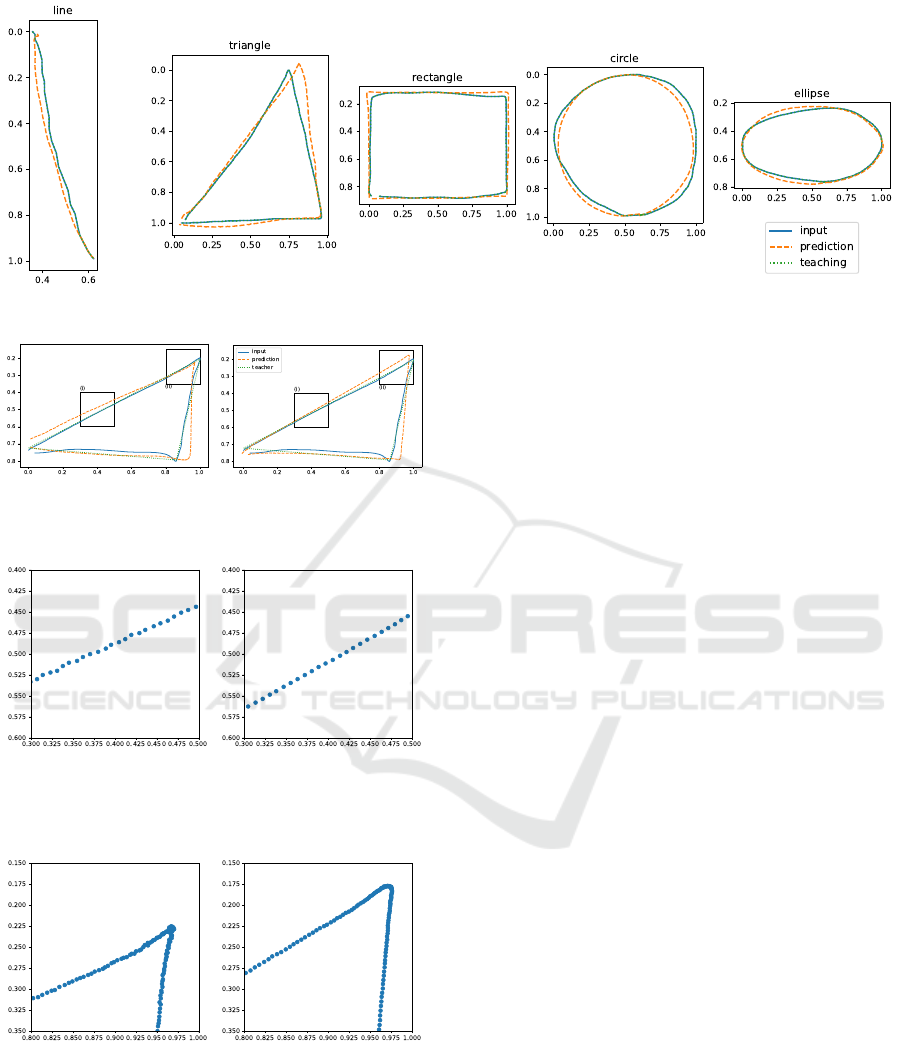
Figure 7: Results using loss with MAV.
(a) MSE only. (b) With MAV.
Figure 8: Comparison of results using MAV and MSE only.
(a) MSE only. (b) With MAV.
Figure 9: Comparison of results using MAV and MSE only
(zoomed in on the straight line, only prediction).
(a) MSE only. (b) With MAV.
Figure 10: Comparison of results using MAV and MSE only
(zoomed in on the corner, only prediction).
For shapes other than straight lines, it is not al-
ways good for MAV to be 0, so this method is thought
to have room for improvement. For example, de-
signing a loss function to bring the distribution of
MAV closer to a normal distribution using the Kull-
back–Leibler divergence may result in better results.
Looking at Table 2, it can be seen that when the
loss function using MAV is used, the value of MAV
decreases significantly. This result is consistent with
the result in Figure 8. However, in the case of the
model using classification, the value of MAV fluctu-
ates greatly. These need to be verified in the future.
6 CONCLUSION
In this study, we introduced a method that combines
classification prediction with traditional regression
prediction. While we observed an improvement in
accuracy over the conventional approach, the classi-
fication model’s accuracy remained suboptimal. Fur-
thermore, the large model size resulted in longer cor-
rection times, posing potential challenges for applica-
tions on mobile devices. Addressing these issues is an
area of ongoing consideration.
We also proposed a loss function using MAV.
While MAV proved effective in reducing hand
tremors for straight-line segments, it introduced is-
sues like rounding at the corners. Nevertheless, as
MAV has not undergone quantitative evaluation to
date, we still regard it as a promising metric for as-
sessing hand tremors.
Looking ahead, we are exploring the adoption
of the Transformer architecture, which has gained
prominence in recent natural language processing en-
deavors, to enhance our classification model’s accu-
racy and reduce its size. The recursive models, such
as LSTM and RNN, employed in this study are adept
at handling time series data. However, they suffer
from information loss as input sequences grow. In
contrast, the Transformer’s performance is not dic-
tated by input length, allowing it to maintain data
fidelity over extensive sequences. This trait sug-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
350

gests that employing Transformers can optimize pre-
dictions with fewer parameters, leading to a more
streamlined model. Future work will focus on lever-
aging the Transformer, as discussed in (Zerveas et al.,
2021), to elevate our classification model’s accuracy
and decrease its overall footprint.
REFERENCES
Ha, D. and Eck, D. (2017). A neural representation of
sketch drawings. arXiv preprint arXiv:1704.03477.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. In Neural Computation. MIT Press.
Kawase, H., Shinya, M., and Shiraishi, M. (2012). Beau-
tification of hand-drawn strokes by adaptive moving
average for illustration trancing tasks. In The Institute
of Image Information and Television Engineers Tech-
nical Report. The Institute of Image Information and
Television Engineers.
Yoshida, T. and Kobayashi, H. (2022). Correction of online
handwriting stroke using machine learning. In The
Proceedings of JSME annual Conference on Robotics
and Mechatronics (Robomec). The Japan Society of
Mechanical Engineers.
Zerveas, G., Jayaraman, S., Patel, D., Bhamidipaty, A., and
Eickhoff, C. (2021). A transformer-based framework
for multivariate time series representation learning. In
Proceedings of the 27th ACM SIGKDD conference on
knowledge discovery & data mining. Association for
Computing Machinery.
Zhu, B. and Nakagawa, M. (2012). Recent trends in online
handwritten character recognition. In The Journal of
the Institute of Electronics, Information and Commu-
nication Engineers. The Institute of Electronics, Infor-
mation and Communication Engineers.
Hand-Drawn Diagram Correction Using Machine Learning
351
