
Spectral Clustering in Rule-Based Algorithms for
Multi-Agent Path Finding
Irene Saccani
1
, Krist
´
yna Janovsk
´
a
2
and Pavel Surynek
2
1
University of Parma, Prama, Italy
2
Czech Technical University in Prague, Prague, Czechia
fi
Keywords:
Multi-Agent Path Finding, Rule-Based Algorithms, Spectral Clustering, Biconnected Components.
Abstract:
We focus on rule-based algorithms for multi-agent path finding (MAPF) in this paper. MAPF is a task of
finding non-conflicting paths connecting agents’ specified initial and goal positions in a shared environment
specified via an undirected graph. Rule-based algorithms use a fixed set of predefined primitives to move
agents to their goal positions in a complete manner. We propose to apply spectral clustering on the underlying
graph to decompose the graph into highly connected component and move agents to their goal cluster first
before the rule-based algorithm is applied. The benefit of this approach is twofold: (1) the algorithms are
often more efficient on highly connected clusters and (2) we can potentially run the algorithms in parallel on
individual clusters.
1 INTRODUCTION
Multi-agent path finding (MAPF) is a task of navigat-
ing multiple agents {a
1
, a
2
, ..., a
k
} from their initial
positions to given goal positions so that agents do not
conflict with each other. The task often uses a graph
theoretical abstraction where the environment is mod-
eled as an undirected graph G = (V, E) with at most
one agent per vertex. Agents in this graph theoret-
ical abstraction move across edges from their initial
vertices specified via s
0
: A → V to their goal vertices
specified via g : A → V .
MAPF represents a major abstraction for mo-
tion planning of multiple robots. The applications
of MAPF include warehouse logistics, coordination
of multiple UAVs, traffic optimization, or navigation
of multiple characters in computer games (Ma and
Koenig, 2017).
We focus on the so-called rule-based algorithms
for multi-agent path finding (Luna and Bekris, 2011;
Surynek, 2009) where agents are moved in the graph
via a-priori defined set of movement rules. These
rules often regard the current configuration of agents
in vertices of G as a permutation in which the rule
makes local transformation. The advantage of these
algorithms is their speed and scalability for large
numbers of agents when compared to search-based
techniques. On the other hand rule based algorithms
do not generate optimal solutions with respect to com-
monly used objectives.
We propose two novel modifications that built on
top of the two existing rule-based MAPF algorithms.
We introduce a hierarchy in which we first decompose
the underlying graph into clusters of high connectiv-
ity on which the rule-based algorithms are known to
work well. Then the agents are moved intro their goal
clusters and finally the specific rule-based algorithm
finishes the final configuration of agents in the within
the goal cluster without interacting with other clus-
ters.
2 BACKGROUND
In this section we summarize the major existing
rule-based algorithms for MAPF: Push-and-Swap
(Luna and Bekris, 2011) and BiBOX (Surynek, 2009;
Surynek, 2014).
2.1 Push-and-Swap
The Push-and-Swap algorithm is a method of solv-
ing MAPF in sub-optimal, yet efficient and complete
manner. The algorithm consists of two basic primi-
tives - one of them being Push and the other one be-
ing Swap. In Push, an agent moves along its shortest
258
Saccani, I., Janovská, K. and Surynek, P.
Spectral Clustering in Rule-Based Algorithms for Multi-Agent Path Finding.
DOI: 10.5220/0012206800003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 258-265
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

path to its goal location and while doing so, pushes
agents blocking its path out of their way, forcing them
to clear a vertex.
In some cases though, a simple push may not be
possible and thus the second primitive Swap must be
employed. In the Swap primitive, two neighbouring
agents swap their positions. This requires the agents
to move to a part of graph where the swap is possible.
A suitable part of a graph is a vertex with the degree
of at least 3 and its neighbour.
This vertex has to have at least two free neighbour-
ing vertices. If this is not fulfilled, the algorithm may
try to free the neighbours of agents occupying them.
After the swap takes place, all agents are back to their
original positions by reversing the sequence of moves
before the swap has been made. If the swap is not
possible to perform, the MAPF instance is deemed
unsolvable for Push-and-Swap
1
.
2.2 BiBOX
The BiBOX algorithm assumes input MAPF where
the underlying graph G = (V, E) is bi-connected and
there are exactly |V | − 2 agents (for fewer agents ei-
ther fake agents can be used to fill up the graph or the
algorithm can be slightly modified to deal with more
vacant vertices). The rules of the BiBOX algorithms
via which it moves agents into their goal positions sig-
nificantly depends on the properties of bi-connected
graphs.
A graph G = (V, E) is bi-connected if for any
two distinct vertices u, v ∈ V there exist two disjoint
paths that connect u and v (alternatively we can say
that u, v belongs to a cycle in G). For graphs ful-
filling this definition it holds that a so called ear de-
composition can be applied to them. That is, each
bi-connected graph G = (V, E) can be constructed
starting with an initial cycle by adding so called
ears to the currently constructed graph. Assume to
have G
i
= (V
i
, E
i
) at hand, a graph at the i-th step
of the ear decomposition, adding an ear is repre-
sented by introducing a path H
i
consisting of fresh
internal vertices say u, u
1
, u
2
, ..., u
n
i
, v where n
i
∈ N
0
and u, v ∈ V
i
, that is we have G
i+1
= (V
i+1
, E
i+1
),
where V
i+1
= V
i
∪ {u
1
, u
2
, ..., u
n
i
} and E
i+1
= E
i
∪
{{u, u
1
};{u
1
, u
2
}, ...{u
n
i
, v}}.
The BiBOX algorithm first determines an ear de-
composition of the input graph G. Let us denote this
ear decomposition C, H
1
, H
2
, ..., H
m
, where C is the
initial cycle and H
i
are the individual ears. The time
1
There is a modification of the Push-and-Swap algo-
rithm called Push-and-Rotate (de Wilde et al., 2014) that
eliminates some issues of Push-and-Swap. For our purposes
however, the original Push-and-Swap is applicable.
C
H
1
H
2
H
3
Figure 1: An illustration of the ear decomposition with the
initial cycle C and three ears H
1
, H
2
, and H
3
.
complexity of determining the ear decomposition is
O(n
2
) where n = |V | ().
Then the algorithm proceeds according to the ear
decomposition starting with the last ear H
m
into which
agents are moved to their goal positions. Once all
agents reach their goals in H
m
they will no longer
move and the last ear H
m
can simply be ignored in
the following stages of the BiBOX algorithm.
Moving agents into their goal positions within the
ear H
m
is done in a stack like manner. Assume that
H
m
= {u, u
1
, u
2
, ..., u
n
m
, v}. We start with agent whose
goal is in u
n
m
and move it u to u
1
and then rotate the
ear once so that the agent appears in u
1
. Similarly
we continue with an agent whose goal is in u
n
m
−1
.
Again move the agent to u and rotate the ear once. We
continue in the same way with the remaining agents
whose goals in in H
m
. If it happens that the agent we
need to move into u already resides in H
m
we need
to rotate it out of the ear and rotate the ear back to
restore the situation. Eventually we have all agents in
their right positions in the ear.
Then the algorithm proceeds in the same way with
the ears H
m−1
, H
m−2
, ... until the initial cycle C re-
mains. For all the above process only one empty ver-
tex in necessary. The second empty vertex will be
used later.
At this stage all agents with their goals in C can
be regarded as a permutation that may differ from the
goal permutation represented by agents’ goal posi-
tions in C. BiBOX now utilizes two empty vertices
to swap pairs of agents in C using a vertex from H
1
as a parking place. Being able to swap the agents the
goal permutation can be reached.
3 RELATED WORK
It is important to note that the motivation for the de-
velopment of sub-optimal algorithms for MAPF is
that the optimal variant with respect to any com-
mon objective, such as the number of moves, the
Spectral Clustering in Rule-Based Algorithms for Multi-Agent Path Finding
259

makespan, or the sum-of-costs is NP-hard (Ratner and
Warmuth, 1990).
There exist multiple alternatives to Push-and-
Swap and BiBOX. These alternatives include other
sub-optimal rule-based algorithms that use different
movement primitives (Wang and Botea, 2011; Khor-
shid et al., 2011; Krontiris et al., 2013). All these
algorithms in some sense originate from the works
on graph pebbling (Wilson, 1974; Kornhauser et al.,
1984). Some of these algorithms use decomposition
of the input graph similarly as we do such as (Ryan,
2008) where sub-graphs of various types use special
movement primitives suitable for a given sub-graph
type.
Significant progress has been made in optimal
solving of MAPF, where the most commonly adopted
objective is the sum-of-cost, the sum of unit costs of
all actions of agents including the wait action. There
exist algorithms derived from the standard A* with
various improvements to tackle multiple paths (Silver,
2005; Standley, 2010). More modern approaches to
MAPF rely on variants of the conflict-based search al-
gorithm (Sharon et al., 2012) from which sub-optimal
variants were derived (Barer et al., 2014; Li et al.,
2021).
Sub-optimal algorithms can be derived also from
compilation-based techniques for MAPF that trans-
late the question of existence of a solution to a dif-
ferent formalism such as Boolean satisfiability (SAT)
(Surynek et al., 2017).
It is important to note, that search-based algo-
rithms are often incomplete as well as their sub-
optimal variants.
4 CONTRIBUTION
The original studies where the BiBOX algorithms and
the Push-and-Swap algorithm are introduced, argue
that the algorithms are suitable for graphs densely
populated by agents. On the other hand the algorithms
use little of the structure of the underlying graph G.
In this work we are trying to utilize the structure of
the graph more while keeping the advantages of rule-
based algorithms for dense cases.
We propose hierarchical variants of BiBOX and
Push-and-Swap that first decompose the input graph
into highly connected components and then run the
specific rule-based algorithm on the components.
This has twofold effect: first, the high connectivity of
the component enables higher efficiency of the rule-
based MAPF algorithm, and second, the algorithm
can be run in parallel on individual components.
Specifically we use spectral clustering (Luo
et al., 2003) to find suitable components of the graph.
This is a numeric method based on calculation of
eigenvalues from the adjacency matrix of G. The ad-
vantage of numeric methods for graph clustering is
that we can easily fine tune the output clustering via
the change of numeric parameters of the clustering
algorithm to fit our needs. These parameters can be,
for example, the number of clusters or the parameters
used in the chosen clustering algorithm.
The first new algorithm is our hierarchical version
of BiBOX:
1. clusters of the input graph are determined via
spectral clustering
2. each cluster is decomposed into bi-connected
components (the spectral clustering should be
tuned so that this step is rather small or does al-
most nothing, i.e. clusters should be near bi-
connected)
3. move agents via modified Push-and-Swap into
their goal bi-connected component
4. reach the final configuration of agents in each bi-
connected component by BiBOX
We will call this algorithm Hierarchical BiBOX
or ChiBOX in short.
The second algorithm is a simple modification of
the previous one. We alternatively run Push-and-
Swap to reach the final configuration in each cluster
(not bi-connected component, hence the construction
of bi-conncted components is skipped). We will call
this algorithm Hierarchical Push-and-Swap or Chi-
Push-and-Swap in short.
4.1 Spectral Clustering and
Bi-Connected Components
We want to decompose the graph in several sub-
graphs. A simple way to achieve that is by using
Spectral Clustering (Luo et al., 2003; Von Luxburg,
2007). The Spectral Clustering is based on numeric
methods hence can be easily parameterized to obtain
various clusterings according to our needs.
Firstly, we compute the optimal number of clus-
ters. This can be done in a number of ways based on
the structure of the graph. For example, if the graph
has a regular structure, with nodes that have a nearly
equal degree, the number of clusters can be decided
based on the number of nodes, as the connectivity and
the number of nodes of each cluster will be more or
less the same. For random biconnected graph an ap-
proach that takes into account the different degrees of
the nodes and finds a balance between the dimension
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
260
Algorithm 1: Spectral Clustering.
Input : A = adjacency matrix
Output: clusters, c
1 L ← NormalizedLaplacian(A);
2 λ ← eigenvalues(L);
3 v ← eigenvectors(L);
4 v, λ ← sort(v, λ);
5 k ← maxGap(λ);
6 U ← matrix where the columns are the first c
eigenvectors;
7 X ← normalized rows of U;
8 clusters ← K-means(X, c);
9 return clusters, c
of each cluster and the connectivity inside the clusters
and between the clusters is needed. In this paper the
number of clusters is computed using the Eigengap
Heuristic. To do so, we find the normalized Lapla-
cian L of the adjacency matrix of the graph. Then we
computed the eigenvalues and the eigenvectors of L
and sorted them based on the eigenvalues. The ideal
number of clusters is given by the index of the max-
imal difference between one eigenvalue and the next.
Having found the optimal number of clusters c, we
create the matrix U where the columns are the first c
eigenvectors and normalize the rows of U. Finally, we
use the rows to compute the clusters using a clustering
algorithm such as K-means (Ng et al., 2001).
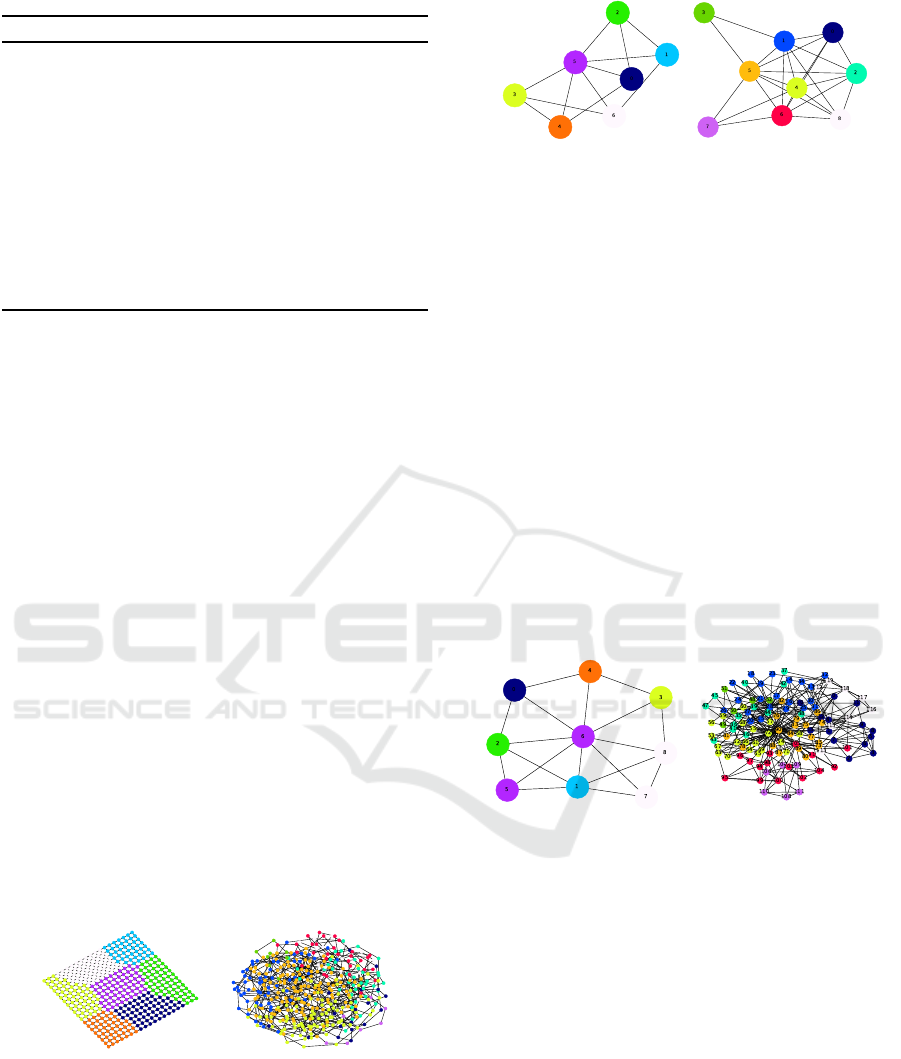
In figure 2 a grid graph and a random bi-connected
graph are colored based on the cluster of each node
obtained from the spectral decomposition.
Proposition 1. The total time complexity of spectral
clustering is O(n
3
) +O(cnT ).
Proof. The time complexity of finding the eigenval-
ues of the Laplacian is O(n
3
) where n = |V |. The time
complexity of K-means is given by O(cnT ) where n
is the number of samples (again n = |V | in our case),
T is the number of iterations and c is the number of
clusters. ■
Figure 2: A 20x20 grid graph and a random bi-connected
graph are colored based on spectral clustering.
Then, we create a new graph where every node
represents a cluster and two clusters are linked if two
of their nodes are neighbours, this graph is called a
cluster graph. In figure 4, the cluster graphs of the
grid graph and the random bi-connected graph can be
seen.
Figure 3: Cluster graphs of graph at figure 2.
Each cluster is then analysed and divided into its
bi-connected components so that we are can apply the
BiBOX algorithm later. A new graph is then built, in
which each node represent a different bi-connected
component and an edge is added between two bi-
connected components if there exists, in the original
graph, an edge linking nodes of those components.
The search of bi-connected components on a clus-
ter i is achieved using the Depth First Search algo-
rithm that has the complexity of O(n
i
) where n
i
is the
number of nodes of the cluster, so the search of bi-
connected components in all the clusters has the to-
tal complexity of O(n), where n = |V| the number of
nodes in the original graph G. Searching the edges of
the new graph has a complexity that is O(n
2
). There-
fore, this part of the algorithm has a complexity that
is O(n) +O(n
2
).
In figure 4 we can see the bi-connected component
graphs. The color of each node shows the cluster of
each bi-connected component.
Figure 4: Bi-connected component graphs of graphs in fig-
ure 2.
We can see that the grid graph, will have clusters
with a more regular structure and that have a smaller
number of bi-connected components, whereas a ran-
dom graph will have clusters with a higher number of
bi-connected components.
4.2 Combining Spectral Decomposition,
Push-and-Swap and BiBOX
The output of Spectral Clustering consists of two
parts. The first is a graph where each node rep-
resents one cluster - one bi-connected graph. This
graph serves as input for the Push-and-Swap algo-
rithm (Luna and Bekris, 2011) which acts as device
to move agents between clusters. The second part of
the output is a list of all decomposed clusters. These
Spectral Clustering in Rule-Based Algorithms for Multi-Agent Path Finding
261

sub-graphs are bi-connected graphs connected to at
least one other bi-connected sub-graph.
In Push-and-Swap, multiple agents can share a
start vertex and a goal vertex. This is because all
vertices represent sub-graphs between which agents
move. A goal of an agent in Push-and-Swap is a par-
ticular vertex representing a sub-graph, but without a
concrete position in that sub-graph. The purpose of
this algorithm is to get all agents into their goal sub-
graphs.
This setting then serves as an input for the BiBOX
algorithm (Surynek, 2009). Multiple instances of Bi-
BOX have to be run for each of n vertices resulting
from Spectral Clustering. By decomposing the orig-
inal graph into disjoint sub-graphs, it is possible to
work on a reduced part of the problem at a time and
it is not necessary to consider all of the agents in the
original graph.
By dividing a graph into several smaller disjoint
instances, we reduce not only the graph itself, but
mainly the number of agents traversing this graph.
In a densely occupied graph, agents may traverse
longer paths in order to avoid collisions with obsta-
cles presented by other agents. Dividing that graph
not only reduces staging necessary for planning paths
for many agents at once, but also reduces operations
agents perform to get in their target loop as this has
already partially been performed by Push-and-Swap.
Disjoint BiBOX instances also offer the possibil-
ity of parallelization of this part of the algorithm, as
no traversions of agents between these instances is
further necessary.
One of rules of BiBOX is that at least two vertices
of its input graph have to be unoccupied (Surynek,
2009). For n decomposed bi-connected sub-graphs
this means that in total there have to be 2n free ver-
tices in the original graph. This algorithm is therefore
usable for |V |−2n agents, where |V | is the number of
vertices in the original graph and n is the number of
decomposed components.
The advantage of spectral clustering is that is has
various numeric parameters through which fine tune
the output clustering for specific MAPF algorithm.
Such fine tuning is difficult with the standard graph
search algorithms.
4.3 Push-and-Swap Modification
To serve this setting more effectively, Push-and-Swap
was modified in following ways.
Firstly, individual nodes in the cluster graph rep-
resent bi-connected components - sub-graphs of the
original graph G, not single nodes. As agents reach
their goal node, they can be ignored as they move
further into their respective sub-graph (cluster). This
makes the resolve operation, in which agents, that
have previously reached their goal and were moved
due to pushing and swapping another agents had to
be placed back at their goal positions unnecessary. As
we can now ignore agents at their goal position during
the whole course of the algorithm, agents at their goal
will never be moved to a different sub-graph (cluster).
Different sub-graphs are connected by one node
of each respective sub-graph. Let’s call this node the
entrance node. Entrance nodes have to be freed from
agents at their goal sub-graphs in order for agents to
pass between sub-graphs without a collision. Each
sub-graph is a bi-connected graph and as per BiBOX’s
precondition has to contain at least two free vertices
(Surynek, 2009). Therefore maintaining the entrance
node free from completed agents should be possible at
all times if there is less than two agents present who
do not have this component set as their goal compo-
nent.
To achieve this, we propose a new function
Component-Push. In this function, all the agents in
a respective sub-graph (cluster or bi-connected) are
pushed further into that sub-graph, so that an agent
occupying the entrance node will free it while not
moving away from its goal sub-graph. As this oper-
ation does not aim to move agents to their individual
goal positions inside their sub-graph, a push operation
is enough to clear the entrance node. All of the agents
consider their neighbouring node in opposite direc-
tion than the entrance node as their goal. Therefore
in this operation, all of the agents present in the sub-
graph move by one node. This way they prepare their
initial positions for BiBOX algorithm, which com-
mences after all of the agents have reached their goal
sub-graphs.
Algorithm 2: Operation Component-Push.
Input : a = agent number,
C = component,
p = agent position,
u = used vertices
Output: True if operation was successful
1 neighbour ← get-neighbour(C, p, u);
2 u ← u ∪ neighbour;
3 if occupying-agent(neighbour) !=
/
0 then
4 if ¬component-push
(occupying-agent(neighbour), C,
neighbour, u) then
5 return False
6 assignment[a] ← neighbour;
7 path ← path ∪ assignment;
8 return True
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
262
Algorithm 2 describes the recursive operation
Component-Push. The input of this function consists
of an agent number belonging to agent to be pushed,
the component - sub-graph where this is taking place,
position of an agent that is to be pushed and a list of
vertices, that have already been used to push.
Firstly, all neighbours of a’s vertex that fulfill re-
quirements (they have not yet been used to push) are
found. The current position of a is then added to u.
Then the push itself is performed. If the neighbour-
ing vertex is not free, it is to be freed with another
Component-Push. If this sequence of actions is not
possible to perform, False is returned. After free-
ing neighbour, position of a is changed to it. List
assignment stores information about the latest posi-
tions of all agents. Finally, the new assignment is
added to path, which represents all paths of all agents
from the beginning of the algorithm to the current
step.
Agents in their starting arrangement are located in
a component, that may differ from their goal compo-
nent. To move to a different component, they can too
perform operation Component-Push, only they now
have their goal position set as their entrance node. As
if they were to push themselves further into the com-
ponent, they push other agents only around that re-
spective component, never between components.
This version can also possibly take advantage of
these individual components when a graph without at
least one vertex of degree of at least 3 is presented. It
can possibly perform the swap by temporarily using a
vertex of a component with a free vertex.
Proposition 2. The time complexity of the ChiBOX
algorithm and the Chi-Push-and-Swap algorithm is
O(n
3
).
Proof. The time complexity of building clusters in
the spectral clustering is dominated by the time com-
plexity the underlying rule-based MAPF algorithms,
BiBOX or Push-and-Swap, that have the time com-
plexity of O(n
3
) for n = |V |. ■
5 PRELIMINARY EXPERIMENTS
In this section we comment on preliminary experi-
ments that we obtained with our implementation of
ChiBOX and Chi-Push-and-Swap in Python.
5.1 Spectral Clustering and
Bi-Connected Components
The decomposition into bi-connected components has
been tested on NetworkX standard graphs such as
the grid graph and the complete graph, and on bi-
connected random graphs. To assure that even highly
connected graphs had enough clusters for the decom-
position to be used for the subsequent use on the al-
gorithm, a minimum value for the number of clus-
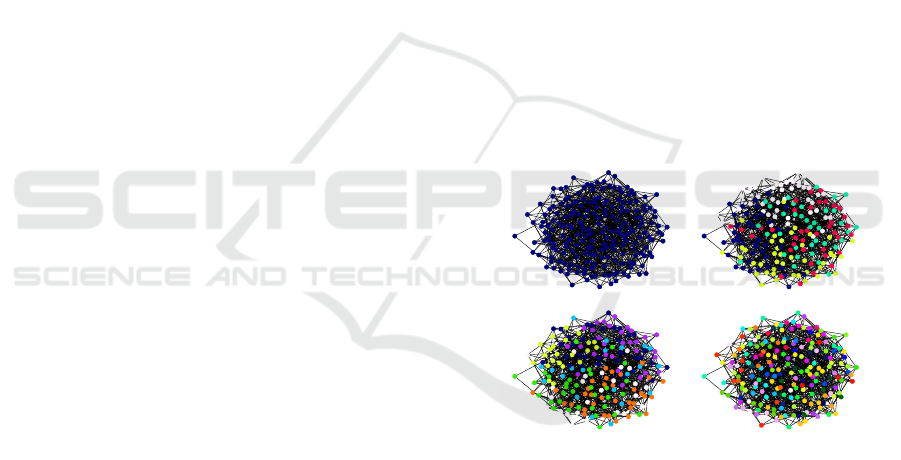
ters has to be imposed. In figure 5 we can see how
different minimum values for the number of clusters
affect the spectral decomposition. In this case a ran-
dom bi-connected graph with 200 nodes is created in
which the degree of every node can vary between 2
and 10. Performing the Eigengap Heuristic on all the
eigenvalues (first image) says that the ideal number of
clusters would be 1. This is not useful for our algo-
rithm, so we can decide to search the maximal differ-
ence between eigenvalues with index i ≥ min, forcing
the number of clusters to be higher than the minimum
value chosen (min). In the second image of figure 5
min = 3, so the algorithm finds the maximal differ-
ence between eigenvalues for i ≥ 3 that is i = 5. The
other images represents clusters with min = 7 (i = 7)
and min = 9 (i = 59). We can notice that the last case,
in which the number of clusters is 59 is also not use-
ful for our algorithm. In this case a balance has to be
found between the minimum and the maximum value
of the number of clusters.
Figure 5: Random bi-connected graphs with nodes colored
based on spectral clustering. The minimum value for the
number of clusters is 1, 3, 7, 9.
5.2 Comparing BIBOX with
Chi-Push-and-Swap and ChiBOX
Preliminary experiments have shown that the main
advantage of our approach lies in safe paralleliza-
tion of BiBOX on individual sub-graphs. As these
bi-connected sub-graphs are disjoint, agents in differ-
ent sub-graphs can move in parallel and not wait af-
ter an agent in a different sub-graph has taken a step
(although this is not possible in Chi-Push-and-Swap,
where agents move sequentially). On a simple 12
vertex bi-connected graph decomposed into 4 clusters
(4 bi-connected components), each having 3 vertices,
Spectral Clustering in Rule-Based Algorithms for Multi-Agent Path Finding
263

4 agents found paths using Chi-Push-and-Swap and
then parallel ChiBOX in 13 steps, while in original
BiBOX a sequential path was found with 15 steps.
Therefore Push-and-Swap and parallel ChiBOX are
able to find a shorter path compared to BiBOX.
As the same clusters may in reality be connected
by more than one edge in different vertex, redundant
edges are ignored in the input of Chi-Push-and-Swap.
Preferable edges to preserve are those which connect
higher-degree vertices in the original graph.
Another advantage of this approach is the way
loops are created. In the original graph, 7 loops
were created for BiBOX, including the original cy-
cle. However due to the spectral decomposition, only
4 loops were necessary - one original cycle per bi-
connected component. Therefore this approach may
aid in simplifying loop decompositions.
6 DISCUSSION AND
CONCLUSION
We proposed a novel approach for the rule-based al-
gorithms for multi-agent path finding. We first de-
compose the input graph into highly connected com-
ponents via the spectral clustering method, a numeric
method based on calculation of eigenvalues of the ad-
jacency matrix of the input graph. Then agents are
moved to their goal clusters and after this the specific
rule-based algorithm is executed on individual clus-
ters to move agents to their goal vertices within the
cluster. We implemented this new method on top of
the BiBOX and Push-and-Swap algorithms, we call
the new variants ChiBOX and Chi-Push-and-Swap.
Our preliminary experiments indicate that the new
methods are promising and can produce solutions that
are better in the term of the number of moves than
if the rule-based algorithm is applied directly on the
unprocessed input graph.
For future work we plan to fine tune the spectral
clustering method to produce clusters that are suitable
for specific rule-based algorithms.
ACKNOWLEDGEMENTS
This research at the Czech Technical University in
Prague has been supported by GA
ˇ
CR - the Czech
Science Foundation, grant registration number 22-
31346S.
REFERENCES
Barer, M., Sharon, G., Stern, R., and Felner, A. (2014).
Suboptimal variants of the conflict-based search al-
gorithm for the multi-agent pathfinding problem. In
ECAI 2014 - 21st European Conference on Artificial
Intelligence, 2014), volume 263 of Frontiers in Arti-
ficial Intelligence and Applications, pages 961–962.
IOS Press.
de Wilde, B., ter Mors, A., and Witteveen, C. (2014). Push
and rotate: a complete multi-agent pathfinding algo-
rithm. J. Artif. Intell. Res., 51:443–492.
Khorshid, M. M., Holte, R. C., and Sturtevant, N. R.
(2011). A polynomial-time algorithm for non-optimal
multi-agent pathfinding. In Proceedings of the Fourth
Annual Symposium on Combinatorial Search, SOCS
2011. AAAI Press.
Kornhauser, D., Miller, G. L., and Spirakis, P. G. (1984).
Coordinating pebble motion on graphs, the diame-
ter of permutation groups, and applications. In 25th
Annual Symposium on Foundations of Computer Sci-
ence, West Palm Beach, Florida, USA, 24-26 October
1984, pages 241–250. IEEE Computer Society.
Krontiris, A., Luna, R., and Bekris, K. E. (2013). From fea-
sibility tests to path planners for multi-agent pathfind-
ing. In Helmert, M. and R
¨
oger, G., editors, Proceed-
ings of the Sixth Annual Symposium on Combinatorial
Search, SOCS 2013. AAAI Press.
Li, J., Ruml, W., and Koenig, S. (2021). EECBS: A
bounded-suboptimal search for multi-agent path find-
ing. In Thirty-Fifth AAAI Conference on Artificial
Intelligence, AAAI 2021, pages 12353–12362. AAAI
Press.
Luna, R. and Bekris, K. E. (2011). Push and swap: Fast co-
operative path-finding with completeness guarantees.
In International Joint Conference on Artificial Intelli-
gence.
Luo, B., Wilson, R. C., and Hancock, E. R. (2003). Spec-
tral clustering of graphs. In Graph Based Representa-
tions in Pattern Recognition, 4th IAPR International
Workshop, GbRPR 2003, Proceedings, volume 2726
of Lecture Notes in Computer Science, pages 190–
201. Springer.
Ma, H. and Koenig, S. (2017). AI buzzwords ex-
plained: multi-agent path finding (MAPF). AI Mat-
ters, 3(3):15–19.
Ng, A., Jordan, M., and Weiss, Y. (2001). On spectral clus-
tering: Analysis and an algorithm. Advances in neural
information processing systems, 14.
Ratner, D. and Warmuth, M. K. (1990). Nxn puzzle
and related relocation problem. J. Symb. Comput.,
10(2):111–138.
Ryan, M. R. K. (2008). Exploiting subgraph structure
in multi-robot path planning. J. Artif. Intell. Res.,
31:497–542.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2012). Conflict-based search for optimal multi-agent
path finding. In Proceedings of the Twenty-Sixth AAAI
Conference on Artificial Intelligence, 2012. AAAI
Press.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
264

Silver, D. (2005). Cooperative pathfinding. In Proceedings
of the First Artificial Intelligence and Interactive Dig-
ital Entertainment Conference, 2005, pages 117–122.
AAAI Press.
Standley, T. S. (2010). Finding optimal solutions to coop-
erative pathfinding problems. In Proceedings of the
Twenty-Fourth AAAI Conference on Artificial Intelli-
gence, AAAI 2010. AAAI Press.
Surynek, P. (2009). A novel approach to path planning
for multiple robots in bi-connected graphs. In 2009
IEEE International Conference on Robotics and Au-
tomation, ICRA 2009, pages 3613–3619. IEEE.
Surynek, P. (2014). Solving abstract cooperative path-
finding in densely populated environments. Comput.
Intell., 30(2):402–450.
Surynek, P., Felner, A., Stern, R., and Boyarski, E. (2017).
Modifying optimal sat-based approach to multi-agent
path-finding problem to suboptimal variants. In Pro-
ceedings of the Tenth International Symposium on
Combinatorial Search, SOCS 2017, pages 169–170.
AAAI Press.
Von Luxburg, U. (2007). A tutorial on spectral clustering.
Statistics and computing, 17:395–416.
Wang, K. C. and Botea, A. (2011). MAPP: a scalable multi-
agent path planning algorithm with tractability and
completeness guarantees. J. Artif. Intell. Res., 42:55–
90.
Wilson, R. M. (1974). Graph puzzles, homotopy, and the
alternating group. Journal of Combinatorial Theory,
Series B, 16(1):86–96.
Spectral Clustering in Rule-Based Algorithms for Multi-Agent Path Finding
265
