
A Survey and Analysis of Evolutionary Operators for Permutations
Vincent A. Cicirello
a
Computer Science, School of Business, Stockton University, 101 Vera King Farris Dr, Galloway, NJ, U.S.A.
Keywords:
Crossover, Evolutionary Algorithms, Fitness Landscape Analysis, Java, Mutation, Open Source, Permutation.
Abstract:
There are many combinatorial optimization problems whose solutions are best represented by permutations.
The classic traveling salesperson seeks an optimal ordering over a set of cities. Scheduling problems often
seek optimal orderings of tasks or activities. Although some evolutionary approaches to such problems utilize
the bit strings of a genetic algorithm, it is more common to directly represent solutions with permutations.
Evolving permutations directly requires specialized evolutionary operators. Over the years, many crossover
and mutation operators have been developed for solving permutation problems with evolutionary algorithms.
In this paper, we survey the breadth of evolutionary operators for permutations. We implemented all of these
in Chips-n-Salsa, an open source Java library for evolutionary computation. Finally, we empirically analyze
the crossover operators on artificial fitness landscapes isolating different permutation features.
1 INTRODUCTION
Combinatorial optimization often involves searching
for an ordering of a set of elements to either mini-
mize a cost function or maximize a value function. A
classic example is the traveling salesperson (TSP), in
which we seek the tour of a set of cities (i.e., simple
cycle that includes all cities) that minimizes cost (Pa-
padimitriou and Steiglitz, 1998). Many scheduling
problems in a variety of domains also involve search-
ing for an ordering of a set of elements (e.g., jobs,
tasks, activities, etc) that either minimizes or maxi-
mizes some objective function (Huang et al., 2023;
Ding et al., 2023; Xiong et al., 2022; Geurtsen et al.,
2023; Li and Wang, 2022; Pasha et al., 2022).
When faced with such an ordering problem, you
can turn to evolutionary computation. Although it is
certainly possible to represent solutions to ordering
problems with bit strings to enable using a genetic al-
gorithm and its standard operators, it is more com-
mon to more directly represent solutions with permu-
tations. But to evolve a population of permutations
requires the use of specialized evolutionary operators.
Many crossover and mutation operators were de-
veloped over the years for evolving solutions to per-
mutation problems. Some like Edge Recombina-
tion (Whitley et al., 1989) assume that a permutation
represents edges such as for the TSP and are designed
so children inherit edges from parents. Others like
a
https://orcid.org/0000-0003-1072-8559
Precedence Preservative Crossover (Bierwirth et al.,
1996) transfer precedences from parents to children,
such as for scheduling problems where completing
a given task earlier than others may improve solu-
tion fitness. Operators like Cycle Crossover (Oliver
et al., 1987) enable children to inherit element posi-
tions from parents. Several studies examine the vari-
ety of problem features that can be important to solu-
tion fitness for permutation problems (Campos et al.,
2005; Cicirello, 2019; Cicirello, 2022b). This is why
the literature is so rich with crossover and mutation
operators for permutations.
In this paper, we survey the breadth of evolution-
ary operators for permutations. We discuss how each
operator works, runtime complexity, and the problem
features that each operator focuses upon. Addition-
ally, we implemented all of the operators in Chips-n-
Salsa (Cicirello, 2020), an open source Java library
for evolutionary computation, with source code avail-
able on GitHub (https://github.com/cicirello/Chips-n-
Salsa). We specify our assumptions and other prelim-
inaries in Section 2. Sections 3 and 4 survey permu-
tation mutation and crossover operators, respectively.
In Section 5, we perform fitness landscape analysis
of the crossover operators on artificial landscapes that
isolate different permutation features. This comple-
ments our prior analysis of mutation operators (Ci-
cirello, 2022b). We discuss conclusions in Section 6.
288
Cicirello, V.
A Survey and Analysis of Evolutionary Operators for Permutations.
DOI: 10.5220/0012204900003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 288-299
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2 PRELIMINARIES
Assumptions: When discussing the runtime for im-
plementations of an operator, we assume that a per-
mutation is represented as an array of elements. The
runtime of some operators may be different if permu-
tations are instead represented by linked lists. We as-
sume both parents of a crossover are the same length,
although some may generalize to different length par-
ents. We use n to denote permutation length.
We assume that operators alter the parent permuta-
tions, i.e., mutation mutates the input permutation and
crossover transforms parents into children. In most
cases, this does not impact algorithm complexity, but
in other cases it does. The runtime of a few mutation
operators is O(1) with this assumption, but O(n) if a
new permutation was instead created.
Permutation Features: For each evolutionary
operator, we discuss the features of permutations that
the operator enables offspring to inherit from parents.
We analyze the operational behavior of the crossover
operators in this paper, including a fitness landscape
analysis in Section 5. For the mutation operators,
some of the insights come from our prior work on fit-
ness landscape analysis (Cicirello, 2022b). The per-
mutation features that we consider are as follows:
• Positions: Does mutation change a small number
of element positions? Does crossover enable chil-
dren to inherit absolute element positions from
parents? For example, element x is at index i in
a child if it was at index i in one of its parents.
• Undirected edges: If the permutation represents a
sequence of undirected edges (e.g., x adjacent to y
implies an undirected edge between x and y), does
mutation change a small number of edges? Does
crossover enable inheriting undirected edges? For
example, x and y are adjacent in a child if they are
adjacent in one of the parents.
• Directed edges: This is like above, but where
a permutation represents a sequence of directed
edges, such as for the Asymmetric TSP (ATSP).
• Precedences: Consider that a permutation repre-
sents a set of precedences. For example, x appear-
ing anywhere prior to y implies a preference for
x over y. Maybe a job for a scheduling problem
instance is critical to schedule earlier than others.
Does mutation change a small number of prece-
dences? Does crossover enable children to inherit
precedences from parents?
• Cyclic precedences: This feature is similar to the
above, but such that the precedences implied by
the permutation follow some unspecified rotation.
3 MUTATION OPERATORS
There are many mutation operators for permutations.
Some are so ubiquitous that it is difficult to attribute
their origin to any specific work. Where possible, we
cite the mutation operator’s origin. Many of these,
however, are commonly utilized without specific at-
tribution, and their origins likely lost to history. If
additional reference is needed, there are many studies
to consult (Bossek et al., 2023; Cicirello, 2022b; Sut-
ton et al., 2014; Serpell and Smith, 2010; Eiben and
Smith, 2003; Valenzuela, 2001).
Swap: Swap mutation (also known as exchange)
chooses two different elements uniformly at random
and swaps them. Its runtime is O(1). It is a good
general purpose mutation because it is a small ran-
dom change regardless of the characteristics (e.g., po-
sitions, edges, precedences) most important to fitness.
Adjacent Swap: This is swap mutation restricted
to adjacent elements. It tends to be associated with
very slow search progress (Cicirello, 2022b) due to
a very small neighborhood size compared to other
available mutation operators, and is thus of more lim-
ited application. Its runtime is O(1).
Insertion: Insertion mutation (also known as
jump mutation) removes a random element and rein-
serts it at a different randomly chosen position. Its
worst case and average case runtime is O(n) since
all elements between the removal and insertion points
shift (n/3 elements on average). It is worth consid-
ering in cases where the permutation represents a se-
quence of edges since an insertion is equivalent to re-
placing only 3 edges. It is shown especially effective
when permutation element precedences are important
to the problem (Cicirello, 2022b). However, it is a
poor choice when positions of elements impact fit-
ness, because it disrupts the positions of a large num-
ber of elements (n/3 on average).
Reversal and 2-change: Reversal mutation
(also known as inversion) reverses a random sub-
permutation. Its runtime is O(n). Within a TSP
context, reversal is approximately equivalent to 2-
change (Lin, 1965), defined as replacing two edges
of a tour to create a new tour. However, some
reversals don’t change any edges (e.g., reversing
the entire permutation). We include both a rever-
sal mutation and a true 2-change mutation in the
Chips-n-Salsa library (Cicirello, 2020). Reversal is
a good choice when a permutation represents undi-
rected edges. However, it is too disruptive in other
cases, including when a permutation represents di-
rected edges, such as for the ATSP, because it changes
the direction of n/3 directed edges on average.
3opt: The 3opt mutation (Lin, 1965) was orig-
A Survey and Analysis of Evolutionary Operators for Permutations
289

inally specified for the TSP within the context of a
steepest descent hill climber (i.e., systematically it-
erate over the neighborhood). The 3opt neighbor-
hood consists of all 2-changes and 3-changes, where
a k-change removes k edges from a TSP tour and re-
places them with k edges that form a different valid
tour. Our implementation in Chips-n-Salsa (Cicirello,
2020) generalizes 3opt from TSP tours to permu-
tations by assuming a permutation represents undi-
rected edges, independent of what it actually repre-
sents, and then randomizes the “edge” selection. Its
runtime is O(n). Like reversal, 3opt is worth consid-
ering when permutations represent undirected edges,
but it is too disruptive in all other cases.
Block-Move: A block-move mutation removes a
random contiguous block of elements, and reinserts
the block at a different random location. It generalizes
insertion mutation from single elements to a block of
elements. Like insertion mutation, it is appropriate
when permutations represent edge sequences (undi-
rected or directed) and it is equivalent to replacing
three edges. It is too disruptive in other contexts. Its
worst case and average case runtime is O(n).
Block-Swap: A block-swap (or block inter-
change) swaps two random non-overlapping blocks.
It generalizes swap mutation from elements to blocks.
It also generalizes block-move, since a block-move
swaps two adjacent blocks. Like block-move, it is ap-
propriate when permutations represent edges (undi-
rected or directed). In that context, it replaces up to
four edges. It is too disruptive in other contexts. Its
worst case and average case runtime is O(n).
Cycle: Cycle mutation’s two forms, Cycle(kmax)
and Cycle(α), induce a random k-cycle (Cicirello,
2022a). They differ in how k is chosen. Cycle(kmax)
selects k uniformly at random from {2,...,kmax}.
Cycle(α) selects k from {2,. ..,n}, with probabil-
ity of choosing k = k
′
proportional to α
k
′
−2
where
α ∈ (0.0, 1.0). Cycle(α)’s much larger neighborhood
better enables local optima avoidance. The worst case
and average runtime of Cycle(kmax) is a constant
that depends upon kmax. The worst case runtime of
Cycle(α) is O(n), while average runtime is a constant
that depends upon α. Both forms are effective when
element positions impact fitness. Fitness landscape
analysis also suggests that it may be relevant in other
cases provided kmax or α carefully tuned.
Scramble: Scramble mutation, sometimes called
shuffle, picks a random sub-permutation and random-
izes the order of its elements. Its worst case and av-
erage runtime is O(n). It is usually too disruptive.
Surprisingly, it is effective for problems where per-
mutation element precedences are most important to
fitness (Cicirello, 2022b), likely because the vast ma-
jority of pair-wise precedences are retained (e.g., all
involving at least one element not in the scrambled
block, and on average half of the precedences where
both elements are in the scrambled block).
Uniform Scramble: We introduced uniform
scramble mutation (Cicirello, 2022b) within research
on fitness landscape analysis. In the common form of
scramble, the randomized elements are together in a
block, while in uniform scramble they are distributed
uniformly across the permutation. Each element is
chosen with probability u, and the chosen elements
are scrambled. Its worst case runtime is O(n) and av-
erage case is O(un). The work that introduced it con-
sidered the case of u = 1/3 to affect the same num-
ber of elements on average as scramble. In that case,
uniform scramble was too disruptive for general use.
We posited that it may be useful to periodically kick
a stagnated search (scramble might be useful for that
purpose as well). Lower values of u may be more ef-
fective for general use, but has not been explored.
Rotation: Chips-n-Salsa (Cicirello, 2020) in-
cludes a rotation mutation that performs a random cir-
cular rotation. It chooses the number of positions to
rotate uniformly at random from {1, ...,n − 1}. We
have neither used it ourselves in research, nor have we
seen others use it, so its strengths and weaknesses are
unknown. It is not possible to transform one permuta-
tion into any other simply via a sequence of rotations.
Thus, it is not likely effective as the only mutation op-
erator in an EA, but might be useful in combination
with others. Runtime is O(n).
Windowed Mutation: Several mutation opera-
tors involve choosing two or three random indexes
into the permutation. Window-limited mutation con-
strains the distance between indexes (Cicirello, 2014).
For example, window-limited swap chooses two ran-
dom elements that are at most w positions apart. Win-
dowed versions of swap, insertion, reversal, block-
move, and scramble are all potentially applicable to
some problems. Like adjacent swap, which is a win-
dowed swap with w = 1, we posit that they likely lead
to slow search progress in most cases if w is too low.
We include them here to be comprehensive, but their
strengths are unclear. The runtime of windowed swap
is O(1), and the runtime of the others is O(min(n,w)),
or just O(w) if we assume that w < n.
Algorithmic Complexity: Table 1 summarizes
the worst case and average case runtime of the mu-
tation operators. The bottom portion concerns the
windowed mutation operators. The notation Swap(w)
means windowedswap with window limit w, and like-
wise for the other windowed operators.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
290
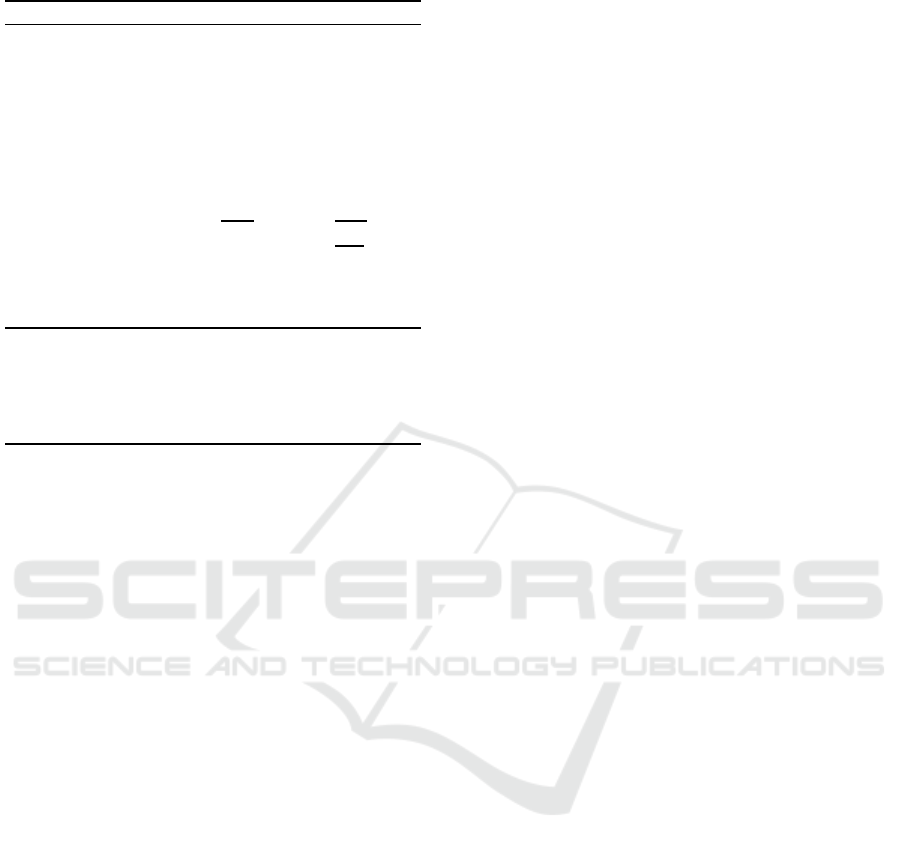
Table 1: Runtime of the mutation operators.
Mutation Worst case Average case
Swap O(1) O(1)
Adjacent Swap O(1) O(1)
Insertion O(n) O(n)
Reversal O(n) O(n)
2-change O(n) O(n)
3opt O(n) O(n)
Block-Move O(n) O(n)
Block-Swap O(n) O(n)
Cycle(kmax) O((
kmax
2
)
2
) O((
kmax
4
)
2
)
Cycle(α) O(n) O((
2−α
1−α
)
2
)
Scramble O(n) O(n)
Uniform Scramble O(n) O(un)
Rotation O(n) O(n)
Swap(w) O(1) O(1)
Insertion(w) O(w) O(w)
Reversal(w) O(w) O(w)
BlockMove(w) O(w) O(w)
Scramble(w) O(w) O(w)
4 CROSSOVER OPERATORS
There are many crossover operators for permutations.
We describe the behavior of each here, and discuss the
permutation features that they best enable inheriting
from parents, confirmed empirically in Section 5.
Cycle Crossover (CX): The CX (Oliver et al.,
1987) operator picks a random permutation cycle of
the pair of parents. Child c
1
inherits the positions of
the elements that are in the cycle from parent p
2
, and
the positions of the other elements from parent p
1
.
Likewise, child c
2
inherits the positions of the ele-
ments in the cycle from p
1
, and the positions of the
other elements from p
2
.
A permutation cycle is a cycle in a directed graph
defined by a pair of permutations. The vertexes of
this hypothetical graph are the permutation elements.
This graph has an edge from x to y if and only
if the index of x in permutation p
1
is the same as
the index of y in permutation p
2
. As an example,
consider permutations p
1
= [0,1,2,3,4,5] and p
2
=
[2,1, 4,5, 0,3]. The graph consists of the directed
edges: {(0,2), (1,1),(2, 4),(3,5),(4,0), (5,3)}. We
don’t actually need to build the graph. There are
three permutation cycles in this example: a 2-cycle in-
volving elements {3,5}, a 3-cycle involving elements
{0,2, 4}, and a singleton cycle with {1}.
CX picks a random index, computes the cycle
containing the elements at that index, and exchanges
those elements to form the children. In this exam-
ple, if any of {0,2, 4} is the random element, then
the children will be: c
1
= [2, 1,4, 3,0, 5] and c
2
=
[0,1, 2,5, 4,3]. Runtime is O(n).
CX strongly transfers positions from parents to
children. Every element in a child inherits its position
from one of the parents. Children also inherit all pair-
wise precedences from one or the other of the parents.
For example, all elements in a child that inherited po-
sitions from p
1
retain the pairwise precedences from
p
1
, and similarly for the elements inherited from p
2
.
The cycle exchange likely breaks many edges.
Edge Recombination (ER): ER (Whitley et al.,
1989) assumes that a permutation represents a cyclic
sequence of undirected edges, such as for the TSP.
Using a data structure called an edge map (Whitley
et al., 1989) for efficient implementation, the set of
undirected edges that appear in one or both parents is
formed. Each child is then created only using edges
from that set. It is thus an excellent choice for prob-
lems where permutations represent undirected edges,
but it is unlikely to perform well otherwise.
Consider an example with p
1
= [3,0,2,1, 4]
and p
2
= [4,3,2,1,0]. Parent p
1
includes the
undirected edges { (3,0),(0, 2),(2,1),(1,4), (4,3)},
and p
2
includes {(4,3),(3,2), (2,1),(1, 0),(0,4)}.
The union of these is the set of undirected edges
{(3,0), (0,2),(2, 1),(1,4),(4,3), (3,2),(1, 0),(0,4)}.
Initialize child c
1
with the first element of p
1
as
c
1
= [3]. The 3 is adjacent to 0, 2, and 4 in the edge
set. Choose the one that is adjacent to the fewest
elements that are not yet in the child. In this case, 0 is
adjacent to three elements, and 2 and 4 are adjacent
to two elements each. Break the tie randomly.
Consider that the random tie breaker resulted in 4
to give us c
1
= [3,4]. The 4 is adjacent to 0 and 1
in the edge set, both of which are adjacent to two
elements that haven’t been used yet, so pick one of
these randomly. Assume that we chose 1 to arrive at
c
1
= [3, 4,1]. The 1 is adjacent to 0 and 2, which are
also the only remaining elements and thus another
tie. Pick one at random, such as 0 in this example, to
obtain c
1
= [3,4,1,0]. Finally add the last element:
c
1
= [3,4,1,0,2]. The other child c
2
is formed in a
similar way, but initialized with the first element of
p
2
. The runtime of ER is O(n).
Enhanced Edge Recombination (EER):
EER (Starkweather et al., 1991) works much like
ER, forming children from edges inherited from the
parents. However, EER attempts to create children
that inherit subsequences of edges that the parents
have in common. Efficient implementation utilizes a
variation of ER’s edge map that is augmented to label
the edges that the parents have in common. Each
child is generated similarly to ER, except that the
decision on which element to add next prefers edges
that start common subsequences. See the original
A Survey and Analysis of Evolutionary Operators for Permutations
291

presentation of EER (Starkweather et al., 1991) or
our open source implementation for full details.
Like ER, the runtime of EER is O(n) and it strongly
enables inheriting undirected edges from parents, but
not so much other permutation features.
Order Crossover (OX): OX (Davis, 1985) begins
by selecting two random indexes to define a cross re-
gion similar to a two-point crossover for bit strings.
Child c
1
gets the positions of the elements in the re-
gion from parent p
1
, and the relative ordering of the
remaining elements from p
2
but populated into c
1
be-
ginning after the cross region in a cyclic manner. The
original motivating problem was the TSP, which is
likely why they chose to insert the relatively ordered
elements after the cross region wrapping to the front
since it gets all the relatively ordered elements to-
gether if you view the permutation as a cycle. Child c
2
is formed likewise, inheriting positions of elements in
the region from p
2
and the relative order of the other
elements from p
1
. Runtime is O(n).
Consider an example with p
1
= [0, 1,2, 3,4, 5,6, 7]
and p
2
= [1,2,0,5,6,7,4,3]. Let the random cross
region consist of indexes 2 through 4. Child c
1
gets the elements at those indexes from p
1
, such
as c
1
= [x, x,2, 3,4,x, x,x], where each x is a place-
holder. The rest of the elements are relatively or-
dered as in p
2
, i.e., in the order 1,0, 5,6, 7, but pop-
ulated into c
1
beginning after the cross region to ob-
tain c
1
= [6,7,2,3,4,1,0,5]. Likewise, initialize c
2
with the elements from the cross region of p
2
to get
c
2
= [x,x,0, 5,6, x,x,x]. Then, populate it after the
cross region with the remaining elements relatively
ordered as in p
1
to obtain c
2
= [4,7, 0,5, 6,1,2,3].
OX is effective for edges, since it enables inher-
iting large numbers of edges. All adjacent elements
within the cross region represent edges inherited from
one parent. Getting the relative order of the remaining
elements from the other parent tends to inherit many
edges from that parent, although some edges will be
broken where the cross region elements had been pre-
viously. Unlike ER and EER, OX’s behaviorfor edges
is independent of whether they are undirected or di-
rected edges, such as for the TSP or the ATSP. OX
is not effective for other features. Many precedences
are flipped due to how OX populates the relatively or-
dered elements after the cross region wrapping to the
front. And although the positions of the elements in
the cross region are inherited by the children, the ma-
jority of the elements are positioned in the children
rather differently than the parents.
Non-Wrapping Order Crossover (NWOX):
The NWOX operator (Cicirello, 2006) is similar to
OX. However, the relatively ordered elements popu-
late the child from the left end of the permutation,
jumping over the cross region, and continuing to the
right end. Consider the earlier example with parents
p
1
= [0,1,2,3,4,5,6,7] and p
2
= [1, 2,0,5,6,7,4,3],
and the same random cross region. Child c
1
is still
initialized with the cross region from p
1
as c
1
=
[x,x,2, 3,4, x,x,x]. But the relatively ordered ele-
ments, 1,0,5,6,7, from p
2
, fill in from the left to
obtain c
1
= [1,0,2,3,4,5,6,7]. Likewise initialize
c
2
= [x, x,0, 5,6,x, x,x], but fill in relatively ordered
elements from the left to get c
2
= [1,2, 0,5, 6,3,4,7].
Unlike OX, NWOX is very effective for cases
where element precedences are important to fitness,
the original motivation for NWOX. Every pairwise
precedence relation in a child is present in at least one
of the parents. However, NWOX breaks more edges
than OX. And like OX, NWOX tends to displace el-
ements from their original positions, although less so
than OX. Runtime is O(n).
Uniform Order Based Crossover (UOBX):
UOBX (Syswerda, 1991) is a uniform analog of OX
and NWOX. It is controlled by a parameter u, which
is the probability that a position is a fixed-point. That
is, child c
i
gets the position of the element at in-
dex j in parent p
i
with probability u. The rela-
tive order of the remaining elements comes from the
other parent. Consider p
1
= [3,0,6,2,5,1,4,7] and
p
2
= [7,6,5,4,3,2,1,0], u = 0.5, and that indexes
0, 3, 4, and 6 were chosen as fixed points. Child
c
1
is initialized with c
1
= [3,x, x,2, 5,x,4,x]. The
remaining elements are relatively ordered as in p
2
(i.e., 7, 6, 1, 0), and inserted into the open spots
left to right to obtain c
1
= [3,7,6,2,5,1,4,0]. Like-
wise, c
2
gets the elements at the fixed points from p
2
:
c
2
= [7,x,x,4, 3,x,1,x]. The other elements are then
relatively ordered as in p
1
(i.e., 0, 6, 2, 5) to obtain
c
2
= [7,0, 6,4, 3,2,1,5].
With UOBX, all pairwise precedences within the
children are inherited from one or the other of the
parents (just like with NWOX). This is because the
fixed points have same relative order as the parent
where they originated, and the others the same rel-
ative order as in the other parent. For other prob-
lem features, UOBX may be relevant if u is carefully
tuned. For example, UOBX is capable of transferring
many element positions to children if u is sufficiently
high. UOBX likely breaks many edges since the fixed
points are uniformly distributed along the permuta-
tion. However, if u is low, it may retain many edges
from parents. Runtime is O(n).
Order Crossover 2 (OX2): Syswerda introduced
OX2 in the same paper as UOBX (Syswerda, 1991).
He originally called it order crossover, but others be-
gan using the name OX2 (Starkweather et al., 1991)
to distinguish it from the original OX, and that name
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
292

has stuck. OX2 is rather different than OX. OX2 be-
gins by selecting a random set of indexes. Syswerda’s
original description implied each index equally likely
chosen as not chosen. In our implementation in
Chips-n-Salsa (Cicirello, 2020), we provide a pa-
rameter u that is the probability of choosing an in-
dex. For Syswerda’s original OX2, set u = 0.5. The
elements at those indexes in p
2
are found in p
1
.
Child c
1
is formed as a copy of p
1
with those ele-
ments rearranged into the relative order from p
2
. In
a similar way, the elements at the chosen indexes
in p
1
are found in p
2
. Child c
2
becomes a copy
of p
2
but with those elements rearranged into the
relative order from p
1
. Consider an example with
p
1
= [1,0,3,2,5,4,7,6] and p
2
= [6,7,4,5,2,3,0,1],
and random indexes: 1, 2, 6, and 7. The elements
at those indexes in p
2
, ordered as in p
2
, are: 7, 4,
0, 1. Rearrange these within p
1
to produce c
1
=
[7,4, 3,2, 5,0,1,6]. The elements at the random in-
dexesin p
1
, ordered as in p
1
, are: 0, 3, 7, 6. Rearrange
these within p
2
to produce c
2
= [0,3, 4,5, 2,7,6,1].
OX2 is closely related to UOBX. Each child pro-
duced by OX2 can be produced by UOBX from the
same pair of parents, but different random indexes,
and vice versa. However, the pair of children pro-
duced by OX2 will differ from the pair produced by
UOBX. Thus, OX2 and UOBX are not exactly equiv-
alent. It is unclear whether there are cases when one
outperforms the other. They should be effective for
the same problem features. OX2’s runtime is O(n).
Precedence Preservative Crossover (PPX):
Bierwirth et al introduced two variations of a
crossover operator focused on precedences, both of
which they referred to as PPX (Bierwirth et al., 1996).
We refer to the two-point version as PPX, and we con-
sider the uniform version later. Both variations were
originally described as producing one child from two
parents. In our implementation in Chips-n-Salsa (Ci-
cirello, 2020), we generalize this to produce two chil-
dren. In the two-point PPX, two random cross points,
i and j, are chosen. Without loss of generality, assume
that i is the lower of these. Child c
1
inherits every-
thing left of i from p
1
, and likewise c
2
everything left
of i from p
2
. Let k = j − i + 1. Child c
1
inherits the
first k elements left-to-right from p
2
that are not yet
in c
1
, and similarly for the other child. The remaining
elements of c
1
come from p
1
in the order they appear
in p
1
, and likewise for the other child.
Consider p
1
= [7,6, 5,4, 3,2, 1,0] and p
2
=
[0,1, 2,3, 4,5,6,7] with random i = 3, j = 5, and
k = j− i+ 1 = 3. The first i = 3 elements of c
1
come
from p
1
, i.e., c
1
= [7,6, 5], and likewise c
2
= [0,1, 2].
The next k = 3 elements of c
1
are the first 3 ele-
ments of p
2
that are not yet in c
1
, which results in
c
1
= [7, 6,5, 0,1, 2]. Similarly, c
2
= [0,1,2,7,6,5].
Complete c
1
with the remaining elements of p
1
that
are not yet in c
1
from left to right. The final c
1
=
[7,6, 5,0, 1,2,4,3] and c
2
= [0,1, 2,7, 6,5,3,4].
The children created by PPX inherit all prece-
dences from one or the other of the parents. How-
ever, many edges are broken relative to the parents,
and very fewpositions are inherited. Runtime is O(n).
Uniform Precedence Preservative Crossover
(UPPX): We refer to the uniform version of
PPX (Bierwirth et al., 1996) as UPPX. It originally
produced one child from two parents, but we general-
ize to create two children. Generate a random array of
n booleans (Bierwirth et al originally specified array
of ones and twos). Let u be the probability of true. We
added this u parameter,which was not present in Bier-
wirth et al’s version. For original UPPX, set u = 0.5.
To form child c
1
iterate over the array of booleans. If
the next value is true, then add to c
1
the first element
of p
1
not yet present in c
1
, and otherwise add to c
1
the first element of p
2
not yet present. Form child c
2
at the same time, but true means add to c
2
the first el-
ement of p
2
not yet present in c
2
, and otherwise the
first element of p
1
not yet present.
UPPX focuses on transferring precedences from
parents to children. The original case, u = 0.5, is
unlikely suitable when edges or positions are impor-
tant to fitness. However, higher or lower values of u
increases likelihood of consecutive elements coming
from the same parent. Thus, tuning u may lead to
an operator relevant for problems like the TSP where
edges are critical to fitness. Runtime is O(n).
Partially Matched Crossover (PMX): Goldberg
and Lingle introduced PMX (Goldberg and Lingle,
1985; Goldberg, 1989). PMX initializes children c
1
and c
2
as copies of parents p
1
and p
2
. It defines a
cross region with a random pair of indexes, which de-
fines a sequence of swaps. For each index i in the
cross region, let x be the element at index i in p
1
, and
y be the element at that position in p
2
. Swap elements
x and y within c
1
, and swap x and y within c
2
.
Consider p
1
= [0,1, 2,3, 4,5,6,7] and p
2
=
[1,2, 0,5, 6,7,4,3], and random cross region from in-
dex 2 to index 4, inclusive. Child c
1
is initially
a copy of p
1
: c
1
= [0,1,2,3,4,5,6,7]. Swap the
2 with the 0 (i.e., elements at index 2 in the par-
ents): c
1
= [2,1,0,3,4,5,6,7]. Next, swap the 3
with the 5 (i.e., elements at index 3 in the parents):
c
1
= [2,1,0,5,4,3,6,7]. Finally, swap the 4 with
the 6 (i.e., elements at index 4 in the parents): c
1
=
[2,1, 0,5, 6,3,4,7]. Follow the same process for the
other child to get: c
2
= [1,0, 2,3, 4,7,6,5].
In the original PMX description, the indexes of the
elements to swap were found with a linear search, and
A Survey and Analysis of Evolutionary Operators for Permutations
293

since the average size of the cross region is also linear
(i.e., n/3 on average), PMX as originally described
required O(n
2
) time. The runtime of our implemen-
tation in Chips-n-Salsa (Cicirello, 2020) is O(n). In-
stead of linear searches, we generate the inverse of
each permutation in O(n) time to use as a lookup ta-
ble to find each required index in constant time.
The cross region has an average of n/3 elements,
due to which each child inherits n/3 element positions
on average from each parent. Thus, children inherit a
significant number of positions from the parents (at
least 2n/3 on average). Although the cross region of
each child includes consecutive elements (i.e., edges)
from the opposite parent, many edges are broken else-
where, so PMX is disruptive for edges. However,
PMX preserves precedences well.
Uniform Partially Matched Crossover
(UPMX): UPMX uses indexes uniformly dis-
tributed along the permutations rather than PMX’s
contiguous cross region (Cicirello and Smith, 2000).
Parameter u is the probability of including an index.
The elements at the chosen indexes define the swaps
in the same way as in PMX. Runtime is O(n).
Consider p
1
= [7,6, 5,4, 3,2, 1,0] and p
2
=
[1,2, 0,5, 6,4,7,3], and random indexes 3, 1, and 6.
Initialize c
1
= [7,6,5,4,3,2,1,0]. Element 4 is at in-
dex 3 in p
1
, and 5 is at that index in p
2
. UPMX swaps
the 4 and 5 to obtain c
1
= [7,6,4,5,3,2,1,0]. Ele-
ments 6 and 2 are at index 1 in p
1
and p
2
. UMPX
swaps the 6 and 2 to get c
1
= [7, 2,4, 5,3, 6,1, 0]. Ele-
ments 1 and 7 are at index 6 in p
1
and p
2
. Swap the 1
and 7 to get the final c
1
= [1, 2,4,5,3,6,7,0]. Follow
the same process to derive c
2
= [7,6, 0,4, 2,5,1,3].
Children inherit positions and precedences from
parents to about the same degree as in PMX. The uni-
formly distributed indexes likely break most edges.
But if u is low, many edges may also be preserved.
Position Based Crossover (PBX): Barecke and
Detyniecki designed PBX to strongly focus on posi-
tions (Barecke and Detyniecki, 2007). One of PBX’s
objectives is for a child to inherit approximately equal
numbers of element positions from each of its parents.
PBX proceeds in five steps. It first generates a list
mapping each element to its indexes in the parents.
Consider p
1
= [2,5, 1,4, 3,0] and p
2
= [5,4, 3,2, 1,0].
The list of index mappings would be [0 → (5,5),1 →
(2,4),2 → (0, 3),3 → (4,2), 4 → (3,1),5 → (1,0)].
Mapping 1 → (2, 4) means that element 1 is at index
2 in p
1
and index 4 in p
2
. Step 2 randomizes the or-
der of the elements in this list, e.g., [3 → (4,2),5 →
(1,0),0 → (5, 5),2 → (0,3), 1 → (2,4),4 → (3,1)].
Also at this stage, PBX chooses a random subset of
elements (each element chosen with probability 0.5),
and swaps the order of the indexes of those elements.
For this example, elements 5 and 1 are chosen. Map-
ping 5 → (1,0) becomes 5 → (0,1), and 1 → (2,4)
becomes 1 → (4,2). This results in [3 → (4,2),5 →
(0,1),0 → (5, 5),2 → (0,3), 1 → (4,2),4 → (3, 1)].
Step 3 begins populating the children by iterating
this list, and for each mapping e → (i
1
,i
2
) it at-
tempts to put element e at index i
1
in c
1
and in-
dex i
2
in c
2
, skipping any if the index is occupied.
For this example, we’d have: c
1
= [5, x, x,4, 3,0] and
c
2
= [x,5,3,2, x,0]. Step 4 makes a second pass try-
ing the index from the other parent to obtain: c
1
=
[5,x,1,4,3,0] and c
2
= [x,5, 3,2, 1,0]. One final pass
places any remaining elements in open indexes: c
1
=
[5,2, 1,4, 3,0] and c
2
= [4,5, 3,2, 1,0].
PBX is strongly position oriented, although less
so than CX since PBX’s last pass puts some elements
at different indexes than either parent. But unlike CX,
PBX children inherit equal numbers of element posi-
tions from parents on average. As a result, children
also inherit approximately equal numbers of prece-
dences from parents, but many edges are disrupted
since inherited positions are not grouped together.
The runtime of PBX is O(n).
Heuristic-Guided Crossover Operators: We
are primarily focusing on crossover operators that
are problem-independent, and which do not require
any knowledge of the optimization problem at hand.
However, there are also some powerful problem-
dependent crossover operators that utilize a heuristic
for the problem. We discuss a few of these here, al-
though these are not currently included in our open
source library (Cicirello, 2020). One of the more
well known crossover operators of this type is Edge
Assembly Crossover (EAX) (Watson et al., 1998)
for the TSP, which utilizes a TSP specific heuris-
tic. Many have proposed variations and improve-
ments to EAX (Sanches et al., 2017; Nagata and
Kobayashi, 2013; Nagata, 2006), including adapt-
ing to other problems (Nagata et al., 2010; Na-
gata, 2007). Another example of a crossover oper-
ator guided by a heuristic is Heuristic Sequencing
Crossover (HeurX) (Cicirello, 2010), which was orig-
inally designed for scheduling problems, and which
requires a constructive heuristic for the problem.
EAX and its many variations are focused on prob-
lems where edges are most important to solution fit-
ness, whereas HeurX is primarily focused on prece-
dences. There are other crossover operators that rely
on problem-dependent information (Freisleben and
Merz, 1996), and utilize local search while creating
children (Barecke and Detyniecki, 2022).
Algorithmic Complexity: The runtime (worst
and average cases) of the crossover operators in this
section, except the heuristic operators, is O(n).
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
294
5 CROSSOVER LANDSCAPES
In this section, we analyze the fitness landscape char-
acteristics of the crossover operators. We use the Per-
mutation in a Haystack problem (Cicirello, 2016) to
define five artificial fitness landscapes, each isolating
one of the permutation features listed earlier in Sec-
tion 2. In the Permutation in a Haystack, we must
search for the permutation that minimizes distance to
a target permutation. The optimal solution is obvi-
ously the target, much like in the OneMax problem
the optimal solution is the bit string of all one bits.
However, the Permutation in a Haystack provides a
mechanism for isolating a permutation feature of in-
terest in how we define distance. To focus on ele-
ment positions, we use exact match distance (Ronald,
1998), the number of elements in different positions
in the permutations. We define fitness landscapes for
undirected and directed edges using cyclic edge dis-
tance (Ronald, 1997) and cyclic r-type distance (Cam-
pos et al., 2005), respectively. Cyclic edge distance
is the number of edges in the first permutation, but
not in the other, if the permutations represent undi-
rected edges, including an edge from last element to
first. Cyclic r-type distance is its directed edge coun-
terpart. We use Kendall tau distance (Kendall, 1938),
the minimum number of adjacent swaps to transform
one permutationinto the other,to define a fitness land-
scape for precedences. We use Lee distance (Lee,
1958) to define a landscape characterized by cyclic
precedences. This last permutation feature, and corre-
sponding distance function, were derived from a prin-
cipal component analysis in our prior work (Cicirello,
2019; Cicirello, 2022b), and we are unaware of any
real problem where this feature is important.
For all landscapes, we use permutation length
n = 100, and generate 100 random target permuta-
tions. We use an adaptive EA that evolves crossover
and mutation rates to eliminate tuning these a priori.
Each population member (p
i
,c
i
,m
i
,σ
i
) consists of a
permutation p
i
, crossover rate c
i
, mutation rate m
i
,
and a σ
i
. In a generation, parent permutations p
i
,
p
j
cross with probability c
i
(which parent is i is arbi-
trary), and each permutation mutates with probability
m
i
. We use swap mutation because it is simple and
works reasonably well across a range of features. The
c
i
and m
i
are initialized randomly in [0.1, 1.0], and
mutated with Gaussian mutation with standard devia-
tion σ
i
, constrained to [0.1,1.0]. The σ
i
are initialized
randomly in [0.05,0.15] and mutated with Gaussian
mutation with standard deviation 0.01, constrained to
[0.01, 0.2]. The population size is 100, and we use
elitism with the single highest fitness solution surviv-
ing unaltered to the next generation. We use binary
10
0
10
1
10
2
10
3
10
4
number of generations (log scale)
0
20
40
60
80
100
average solution cost
Swap
CX
ER
EER
OX
NWOX
UOBX
OX2
PPX
UPPX
PMX
UPMX
PBX
Figure 1: Crossover comparison for element positions.
tournament selection. As a baseline, we use an adap-
tive mutation-only EA with swap mutation to exam-
ine whether the addition of a crossover operator im-
proves performance. For UOBX, OX2, and UPPX,
we use u = 0.5 as suggested by their authors; and we
use u = 0.33 for UPMX for the same reason.
We use OpenJDK 17, Windows 10, an AMD
A10-5700 3.4 GHz CPU, and 8GB RAM. We use
Chips-n-Salsa version 6.4.0, as released via the
Maven Central repository, and not a development
version to ensure reproducibility. The distance
metrics for the Permutation in a Haystack are from
version 5.1.0 of JavaPermutationTools (JPT) (Ci-
cirello, 2018). The source code of Chips-n-Salsa
(https://github.com/cicirello/Chips-n-Salsa) and JPT
(https://github.com/cicirello/JavaPermutationTools)
is on GitHub; as is the source of the ex-
periments, and the raw and processed data
(https://github.com/cicirello/permutation-crossover-
landscape-analysis).
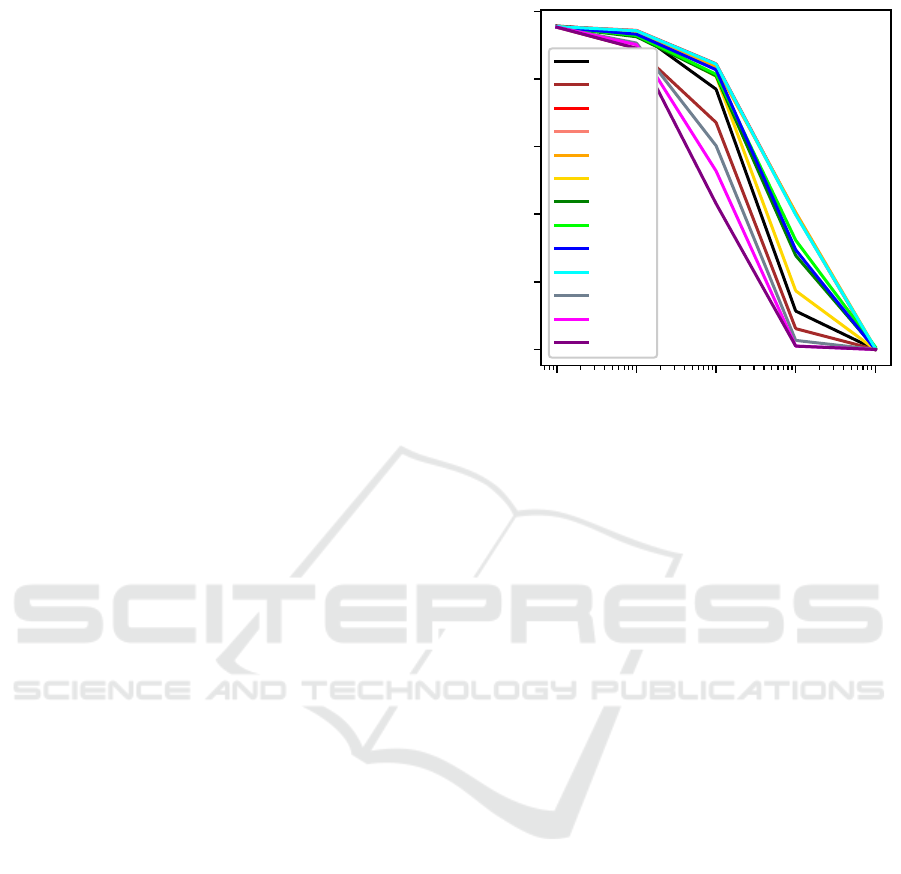
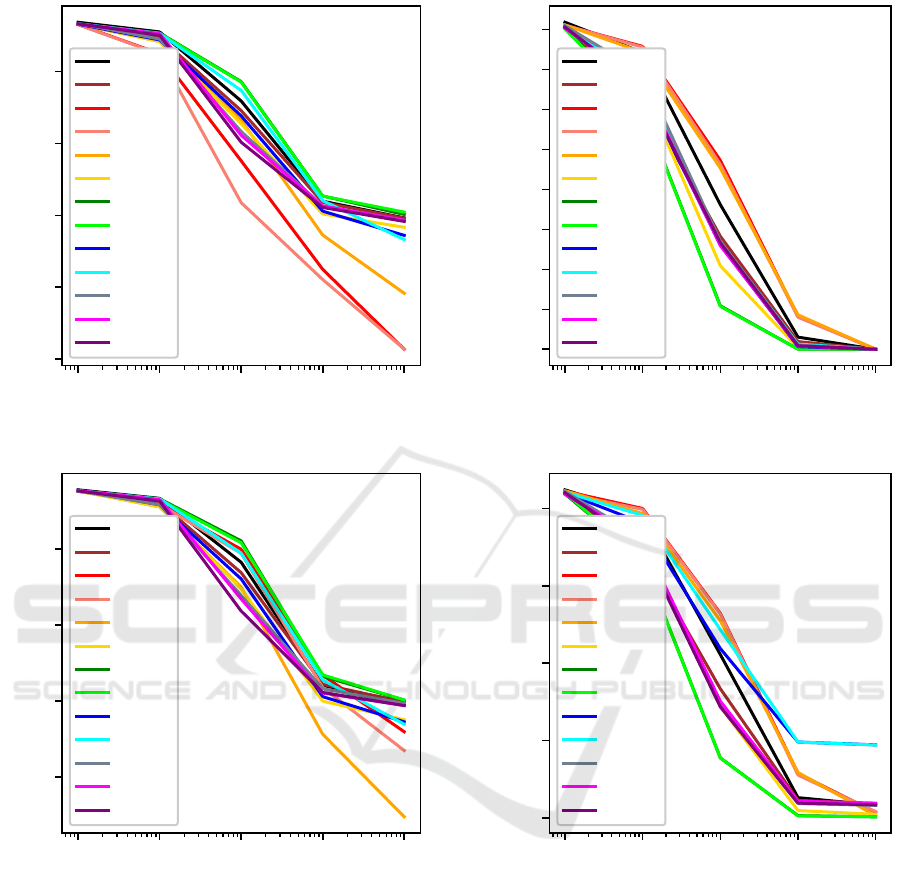
Figures 1 to 5 show the results on the five land-
scapes. The x-axis is number of generations at log
scale, and the y-axis is solution cost averaged over
100 runs. A black line shows the mutation-only base-
line to make it easy to see which crossover opera-
tors enable improvement over the mutation-only case.
Subtle differences among them are not particularly
important, as we are only identifying which crossover
operators are worth considering for a problem based
upon permutation features. Inspect the raw and sum-
mary data in GitHub for a fine-grained comparison.
Optimizing Element Positions: In Figure 1, we
see four crossover operators optimize element posi-
A Survey and Analysis of Evolutionary Operators for Permutations
295
10
0
10
1
10
2
10
3
10
4
number of generations (log scale)
0
20
40
60
80
average solution cost
Swap
CX
ER
EER
OX
NWOX
UOBX
OX2
PPX
UPPX
PMX
UPMX
PBX
Figure 2: Crossover comparison for undirected edges.
10
0
10
1
10
2
10
3
10
4
number of generations (log scale)
20
40
60
80
average solution cost
Swap
CX
ER
EER
OX
NWOX
UOBX
OX2
PPX
UPPX
PMX
UPMX
PBX
Figure 3: Crossover comparison for directed edges.
tions better than mutation alone: CX, PMX, UPMX,
and PBX. Although UOBX and OX2 perform worse
than baseline, they may also be relevant for positions
if u is carefully tuned as discussed in Section 4.
Optimizing Undirected Edges: Figure 2 shows
that only EER, ER, and OX optimize undirected edges
better than the mutation-only baseline.
Optimizing Directed Edges: For directed edges
(Figure 3), only OX performs substantially better than
the mutation-only baseline. For long runs, others
(EER, ER, NWOX, PPX, UPPX) begin to outperform
the baseline, but by much smaller margins than OX.
Although not seen here, with carefully tuned u,
10
0
10
1
10
2
10
3
10
4
number of generations (log scale)
0
250
500
750
1000
1250
1500
1750
2000
average solution cost
Swap
CX
ER
EER
OX
NWOX
UOBX
OX2
PPX
UPPX
PMX
UPMX
PBX
Figure 4: Crossover comparison for precedences.
10
0
10
1
10
2
10
3
10
4
number of generations (log scale)
0
500
1000
1500
2000
average solution cost
Swap
CX
ER
EER
OX
NWOX
UOBX
OX2
PPX
UPPX
PMX
UPMX
PBX
Figure 5: Crossover comparison for cyclic precedences.
UOBX, OX2, and UPMX may be relevant for edges
(undirected or directed) as discussed in Section 4.
Optimizing precedences: Several crossover op-
erators optimize precedences (Figure 4) better than
the mutation-only baseline, including: CX, NWOX,
UOBX, OX2, PPX, UPPX, PMX, UPMX, and PBX.
Optimizing Cyclic Precedences: Figure 5 shows
the cyclic precedences results, which reveal many
crossover operators superior to mutation alone: CX,
NWOX, UOBX, OX2, PMX, UPMX, and PBX. Note
that some of these strongly overlap on the graph.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
296
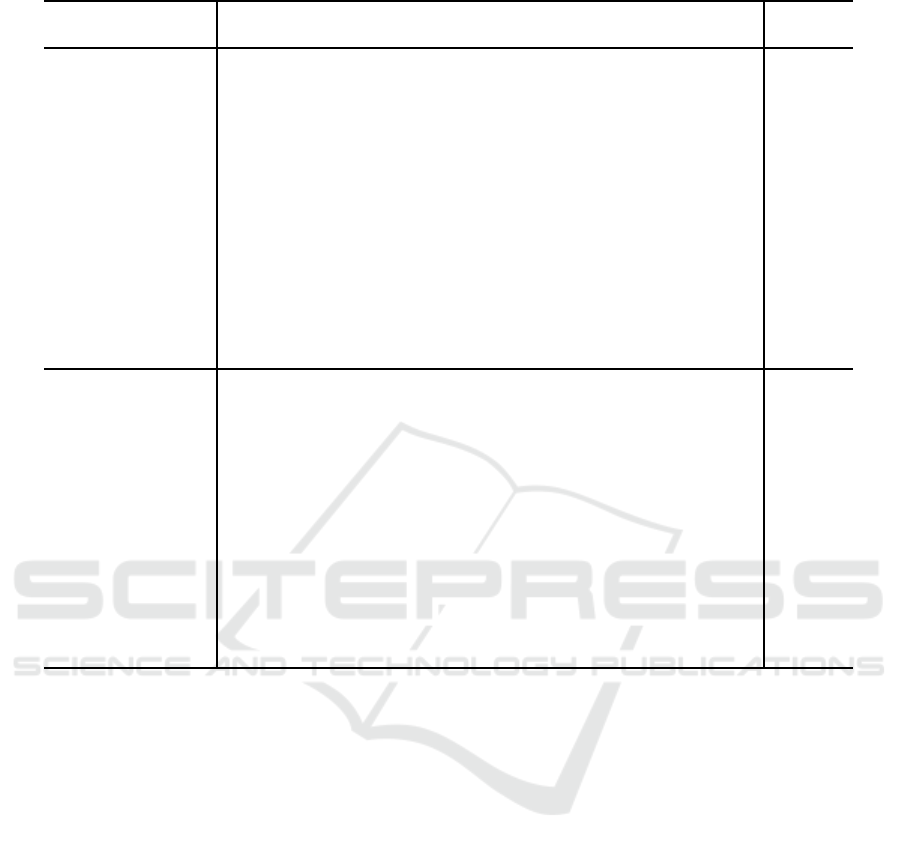
Table 2: Evolutionary operator characteristics: Xmeans effective for feature, and ? means may be effective if carefully tuned.
Undirected Directed Cyclic Limited
Operator
Positions Edges Edges Precedences Precedences /Special
CX X X X
ER X
EER X
OX X X
NWOX X X
UOBX ? ? ? X X
OX2 ? ? ? X X
PPX X
UPPX ? ? X
PMX X X X
UPMX X ? ? X X
PBX X X X
EAX X X
HeurX X
Swap X X X X X
Adjacent Swap X
Insertion X X X X
Reversal X
2-change X
3opt X
Block-Move X X
Block-Swap X X
Cycle(kmax) X ? ? ? ?
Cycle(α) X ? ? ? ?
Scramble X
Uniform Scramble ? ? ? ? ?
Rotation X
6 CONCLUSIONS
Table 2 maps the evolutionary operators to the permu-
tation features they effectively optimize. The top and
bottom parts of Table 2 focus on crossover and muta-
tion operators, respectively. The crossover operator to
feature mapping in the top of Table 2 is as derived in
Section 5. The mutation operator to feature mapping
in the bottom of Table 2 is partially derived from our
prior research (Cicirello, 2022b). In some cases (indi-
cated with a question mark), applicability of an evo-
lutionary operator for a feature may require tuning a
control parameter, such as u for uniform scramble or
the various uniform crossover operators.
One objective of this paper is to serve as a sort of
catalog of evolutionary operators relevant to evolving
permutations. Another objective is to offer insights
into which operators are worth considering for a prob-
lem based upon the characteristics of the problem. If a
fitness function for a problem is heavily influenced by
a specific permutation feature, the insights from this
paper can assist in narrowing the available operators
to those most likely effective. If a fitness function is
influenced by a combination of features, then an op-
erator that balances its behavior with respect to that
combination of features may be a good choice.
In future work, we plan to dive deeper into the
behavior of the operators whose strengths are less
clear. The crossover operators UOBX, OX2, UPPX,
and UPMX include a tunable parameter, as do the mu-
tation operators uniform scramble, Cycle(kmax), and
Cycle(α). Although our empirical analyses identified
problem features for which these operators are well
suited, we also hypothesized that it may be possible
to tune their control parameters for favorable perfor-
mance on other permutation features. Future work
will explore more definitively answering whether or
not such tuning can extend the applicability of these
operators to more features.
A Survey and Analysis of Evolutionary Operators for Permutations
297

REFERENCES
Barecke, T. and Detyniecki, M. (2007). Memetic algorithms
for inexact graph matching. In 2007 IEEE Congress
on Evolutionary Computation, pages 4238–4245.
Barecke, T. and Detyniecki, M. (2022). The effects of inter-
action functions between two cellular automata. Com-
plex Systems, 31(2):219–246.
Bierwirth, C., Mattfeld, D. C., and Kopfer, H. (1996). On
permutation representations for scheduling problems.
In The 4th International Conference on Parallel Prob-
lem Solving from Nature, pages 310–318, Berlin, Hei-
delberg. Springer.
Bossek, J., Neumann, A., and Neumann, F. (2023). On
the impact of operators and populations within evolu-
tionary algorithms for the dynamic weighted traveling
salesperson problem. arXiv:2305.18955.
Campos, V., Laguna, M., and Mart´ı, R. (2005). Context-
independent scatter and tabu search for permuta-
tion problems. INFORMS Journal on Computing,
17(1):111–122.
Cicirello, V. A. (2006). Non-wrapping order crossover: An
order preserving crossover operator that respects ab-
solute position. In Proceedings of the Genetic and
Evolutionary Computation Conference (GECCO’06),
volume 2, pages 1125–1131. ACM Press.
Cicirello, V. A. (2010). Heuristic sequencing crossover: In-
tegrating problem dependent heuristic knowledge into
a genetic algorithm. In Proceedings of the 23rd Inter-
national Florida Artificial Intelligence Research Soci-
ety Conference, pages 14–19. AAAI Press.
Cicirello, V. A. (2014). On the effects of window-limits on
the distance profiles of permutation neighborhood op-
erators. In Proceedings of the 8th International Con-
ference on Bio-inspired Information and Communica-
tions Technologies, pages 28–35.
Cicirello, V. A. (2016). The permutation in a haystack
problem and the calculus of search landscapes.
IEEE Transactions on Evolutionary Computation,
20(3):434–446.
Cicirello, V. A. (2018). JavaPermutationTools: A java li-
brary of permutation distance metrics. Journal of
Open Source Software, 3(31):950.1–950.4.
Cicirello, V. A. (2019). Classification of permutation dis-
tance metrics for fitness landscape analysis. In Pro-
ceedings of the 11th International Conference on Bio-
inspired Information and Communication Technolo-
gies, pages 81–97. Springer Nature.
Cicirello, V. A. (2020). Chips-n-salsa: A java library of cus-
tomizable, hybridizable, iterative, parallel, stochastic,
and self-adaptive local search algorithms. Journal of
Open Source Software, 5(52):2448.1–2448.4.
Cicirello, V. A. (2022a). Cycle mutation: Evolving per-
mutations via cycle induction. Applied Sciences,
12(11):5506.1–5506.26.
Cicirello, V. A. (2022b). On fitness landscape analysis of
permutation problems: From distance metrics to mu-
tation operator selection. Mobile Networks and Appli-
cations.
Cicirello, V. A. and Smith, S. F. (2000). Modeling ga per-
formance for control parameter optimization. In Pro-
ceedings of the Genetic and Evolutionary Computa-
tion Conference, pages 235–242. Morgan Kaufmann.
Davis, L. (1985). Applying adaptive algorithms to epistatic
domains. In Proceedings of the 9th International Joint
Conference on Artificial Intelligence, pages 162–164,
San Francisco, CA, USA. Morgan Kaufmann.
Ding, J., Chen, M., Wang, T., Zhou, J., Fu, X., and Li,
K. (2023). A survey of ai-enabled dynamic manu-
facturing scheduling: From directed heuristics to au-
tonomous learning. ACM Computing Surveys.
Eiben, A. E. and Smith, J. E. (2003). Introduction to Evolu-
tionary Computing. Springer, Berlin, Germany.
Freisleben, B. and Merz, P. (1996). New genetic local
search operators for the traveling salesman problem.
In Parallel Problem Solving from Nature–PPSN IV,
pages 890–899, Berlin, Heidelberg. Springer.
Geurtsen, M., Didden, J. B., Adan, J., Atan, Z., and Adan,
I. (2023). Production, maintenance and resource
scheduling: A review. European Journal of Opera-
tional Research, 305(2):501–529.
Goldberg, D. E. (1989). Genetic Algorithms in Search, Op-
timization and Machine Learning. Addison Wesley.
Goldberg, D. E. and Lingle, R. (1985). Alleles, loci, and
the traveling salesman problem. In Proceedings of the
1st International Conference on Genetic Algorithms,
pages 154–159.
Huang, B., Zhou, M., Lu, X. S., and Abusorrah, A. (2023).
Scheduling of resource allocation systems with timed
petri nets: A survey. ACM Computing Surveys,
55(11).
Kendall, M. G. (1938). A new measure of rank correlation.
Biometrika, 30(1/2):81–93.
Lee, C. (1958). Some properties of nonbinary error-
correcting codes. IRE Trans Inf Theory, 4(2):77–82.
Li, M. and Wang, G.-G. (2022). A review of green shop
scheduling problem. Information Sciences, 589:478–
496.
Lin, S. (1965). Computer solutions of the traveling sales-
man problem. The Bell System Technical Journal,
44(10):2245–2269.
Nagata, Y. (2006). New eax crossover for large tsp
instances. In Parallel Problem Solving from Na-
ture - PPSN IX, pages 372–381, Berlin, Heidelberg.
Springer.
Nagata, Y. (2007). Edge assembly crossover for the capac-
itated vehicle routing problem. In Evolutionary Com-
putation in Combinatorial Optimization, pages 142–
153, Berlin, Heidelberg. Springer.
Nagata, Y., Br¨aysy, O., and Dullaert, W. (2010). A penalty-
based edge assembly memetic algorithm for the vehi-
cle routing problem with time windows. Computers
& Operations Research, 37(4):724–737.
Nagata, Y. and Kobayashi, S. (2013). A powerful genetic
algorithm using edge assembly crossover for the trav-
eling salesman problem. INFORMS Journal on Com-
puting, 25(2):346–363.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
298

Oliver, I. M., Smith, D. J., and Holland, J. R. C. (1987). A
study of permutation crossover operators on the trav-
eling salesman problem. In Proceedings of the Second
International Conference on Genetic Algorithms and
Their Application, pages 224–230, USA. L. Erlbaum
Associates Inc.
Papadimitriou, C. H. and Steiglitz, K. (1998). Combinato-
rial Optimization: Algorithms and Complexity. Dover
Publications, Mineola, NY, USA.
Pasha, J., Elmi, Z., Purkayastha, S., Fathollahi-Fard, A. M.,
Ge, Y.-E., Lau, Y.-Y., and Dulebenets, M. A. (2022).
The drone scheduling problem: A systematic state-
of-the-art review. IEEE Transactions on Intelligent
Transportation Systems, 23(9):14224–14247.
Ronald, S. (1997). Distance functions for order-based en-
codings. In IEEE Congress on Evolutionary Compu-
tation, pages 49–54.
Ronald, S. (1998). More distance functions for order-based
encodings. In IEEE Congress on Evolutionary Com-
putation, pages 558–563.
Sanches, D., Whitley, D., and Tin´os, R. (2017). Build-
ing a better heuristic for the traveling salesman prob-
lem: Combining edge assembly crossover and parti-
tion crossover. In Proceedings of the Genetic and Evo-
lutionary Computation Conference, pages 329–336,
New York, NY, USA. Association for Computing Ma-
chinery.
Serpell, M. and Smith, J. E. (2010). Self-adaptation of mu-
tation operator and probability for permutation repre-
sentations in genetic algorithms. Evolutionary Com-
putation, 18(3):491–514.
Starkweather, T., McDaniel, S., Mathias, K., Whitley, D.,
and Whitley, C. (1991). A comparison of genetic se-
quencing operators. In Proceedings of the Fourth In-
ternational Conference on Genetic Algorithms, pages
69–76.
Sutton, A. M., Neumann, F., and Nallaperuma, S. (2014).
Parameterized runtime analyses of evolutionary algo-
rithms for the planar euclidean traveling salesperson
problem. Evolutionary Computation, 22(4):595–628.
Syswerda, G. (1991). Schedule optimization using genetic
algorithms. In Davis, L., editor, Handbook of Genetic
Algorithms. Van Nostrand Reinhold.
Valenzuela, C. L. (2001). A study of permutation oper-
ators for minimum span frequency assignment using
an order based representation. Journal of Heuristics,
7(1):5–21.
Watson, J., Ross, C., Eisele, V., Denton, J., Bins, J., Guerra,
C., Whitley, D., and Howe, A. (1998). The traveling
salesrep problem, edge assembly crossover, and 2-opt.
In Parallel Problem Solving from Nature - PPSN V,
pages 823–832, Berlin, Heidelberg. Springer.
Whitley, L. D., Starkweather, T., and Fuquay, D. (1989).
Scheduling problems and traveling salesmen: The ge-
netic edge recombination operator. In Proceedings
of the 3rd International Conference on Genetic Al-
gorithms, pages 133–140, San Francisco, CA, USA.
Morgan Kaufmann Publishers Inc.
Xiong, H., Shi, S., Ren, D., and Hu, J. (2022). A survey of
job shop scheduling problem: The types and models.
Computers & Operations Research, 142:105731.
A Survey and Analysis of Evolutionary Operators for Permutations
299
