
Fault Diagnosis with Stacked Sparse AutoEncoder for Multimode
Process Monitoring
Yahia Kourd
1a
, Messaoud Ramdani
2b
, Riadh Toumi
1
and Ahmed Samet
1
1
Laboratory of Electrical Engineering and Renewable Energy, Faculty of Science and Technology,
Mohamed-Cherif Messaadia University, Souk Ahras, 41000, Algeria
2
Department of Electronics, Faculty of Engineering, Badji-Mokhtar University, Annaba, 23000, Algeria
Keywords: Fault Diagnosis, Process Monitoring, Principal Component Analysis, Sparse PCA and AutoEncoder.
Abstract: Traditional process monitoring generally assumes that process data follow a Gaussian distribution with
linear correlation. Nevertheless, this sort of restriction cannot be satisfied in reality since many industrial
processes are nonlinear in nature. This work provides an enhanced multivariate statistical process
monitoring technique based on the Stacked Sparse AutoEncoder and K-Nearest Neighbor (SSAE-KNN).
This approach consists of developing a model by using Stacked Sparse AutoEncoder (SSAE) to get the
residual space, which is the main tool in detecting and reconstructing the potential missing data by residual
space. The monitoring statistics in this space are constructed using KNN rules; the threshold values for
SSAE-KNN process monitoring are estimated utilizing the Kernel Density PDF Estimation (KDE) method,
and an enhanced Sensor Validity Index (SVI) is proposed to detect faulty data based on the reconstruction
approach. The experimental results using actual data from a photovoltaic power station connected at the site
of OuedKebrit, located in north-eastern Algeria, reveal the effectiveness of the proposed scheme and show
its capacity to detect and identify sensor failures.
a
https://orcid.org/ 0000-0002-4370-5700
b
https://orcid.org/ 0000-0002-6726-1155
1 INTRODUCTION
Data mining can extract hidden and usable
information from massive datasets, where possible
correlations may be utilized for automated anomaly
detection and associated issue root cause
identification. In general, Statistical Process Control
(SPC) charts enable the visualization of process
development and the identification of abnormal
changes (
Qin S. J., 2012
and
Yin S. et al, 2014)
.
However, most standard SPC methods like PCA
(Principal Components Analysis) work well only if
the correlations are linear, which is a poor
approximation of the real world. Deep learning is an
unsupervised approach that can provide a better
representation using a deep learning algorithm and
has recently proved extremely effective in several
fields (
Hinton G. E. et al, 2006
). As part of deep
learning approaches, we present the Stacked Sparse
AutoEncoder (SSAE) to reconstitute the input data
(
Xu J. et al 2016
). The K-nearest neighbor rule is one
of the population-based learning strategies, which
uses the closest samples to classify objects in an n-
dimensional feature space. It is the simplest way of
learning; the number of k defines how numerous
nearest neighbors will be grouped for classification
with the Euclidean distance metric commonly used
to compute the distance between data points (
Wang
G. et al, 2015
). The Squared Prediction Error (SPE)
index is used to identify detection. It is developed by
introducing the KNN rule and its associated control
limits established by Kernel Density Estimation
(KDE) (
Odiowei P. E. et al, 2010
). Additionally, the
Sensor Validity Index (SVI) is proposed as a way of
detecting faulty sensors. The findings reveal that,
when compared to the contribution plot, the
proposed technique is more effective at diagnosis the
faulty sensor. In this paper discusses the application
of a Stacked Sparse AutoEncoder (SSAE) that has
been trained to recreate the input data acquired
during normal operation. Then, using KNN, create
monitoring statistics in the residual space of the
Kourd, Y., Ramdani, M., Toumi, R. and Samet, A.
Fault Diagnosis with Stacked Sparse AutoEncoder for Multimode Process Monitoring.
DOI: 10.5220/0012194400003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 237-242
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
237
SSAE model. The paper is structured as follows: A
brief overview of basic concepts is presented in
Section 2. The recommended approaches for
multimode process monitoring are shown in Section
3. The validation of the methods is realized by
experiments conducted in section 4, utilizing real
data from solar power plants. The last section
concentrates on a discussion of the results obtained
and conclusions.
2 METHODS USED
2.1 Stacked Sparse AutoEncoder
Deep Learning has recently demonstrated
outstanding performance on a variety of tasks. It has
been utilized in the past for visual analysis and
picture identification, but not for process
monitoring. Models of deep neural networks with a
hidden layer called the bottleneck layer are used to
extract features. To begin, the input data X
i
= 1, 2,
3,....N is translated as follows into a hidden layer
represented by the function h
i
shown as follows:
h
i
= f(x
i
) = sigm(W
1
x+b
1
) (1)
Where b1 and W
1
are respectively the bias and the
weight between the input part and the hidden layer
and sigm(x) is a sigmoid function chosen to get more
bounded and uniformly distributed embedding. In
the decoding layer, h
i
is translated to the output
represented by x. In this stage, we employ the
activation function shown below:
x
i
= g(h
i
) = sigm(W
2
h+b
2
) (2)
Where W
2
and b
2
are respectively the bias and the
weight between the hidden layer and the output layer
(x). The bottleneck network whose learning criteria
contain a sparsity penalty in the bottleneck part is
named Stacked Sparse AutoEncoder (SSAE) (
Yin J.
et al, 2019). The aim of this network is to estimate its
output (prediction of the input) as similarly as
possible to its input, thus through optimizing the cost
function described by:
(3)
Where λ and β are respectively the coefficient that
establishes the weight decay and the sparsity penalty
terms, m: is the number of the hidden nodes.
Equation (3) consist of the reconstruction error, the
regularization term and the last term is sparsity
penalty, where KL(ρp
̂
j
) is the Kullback-Leibler
divergence, it is used to compute the difference
between ρ and p
̂
i
, those are the constraint utilized
during learning. The back propagation algorithm is
utilized to find the appropriate parameters W
1
, W
2
,
b
1
, b
2
and to minimize the cost function.
2.2 K-Nearest Neighbor
Firstly, the KNN rule is a supervised classification
algorithm that is nonparametric. The goal of
supervised classification is to predict the unknown
sample of data using a set of labeled samples. The
detection approach works on the assumption that a
sample under control will take values in the
neighborhood of the training data. Then, if a new
sample deviates too much from the data under
control, it considers out-of-control. A cumulative
distance between new sample and its k closest
neighbors included in the learning sample is
computed to analyze the distance between each new
sample and the data under control. Because the KNN
rule is a nonlinear classifier, it could address many
limitations such as process nonlinearity.
Furthermore, since the FD-KNN technique finds
flaws based on local neighbors of comparable
batches, it is ideally suited for multimodal data sets
in which batches may be divided into subgroups
with distinct characteristics (
Ren Z. et al, 2021).
2.3 Kernel Density Estimation
KDE is a method for generating a smooth PDF
(Probability Density Function) from a collection of
random samples and fitting it to a data set. It’s often
used to estimate PDFs, particularly for univariate
random data. The KDE may be used with the Q and
T
2
statistics since they are both univariate, despite
the fact that the process they describe is multivariate.
The PDF g(y) of a random variable y may be
estimated from its m samples, y
j
, j = 1,...,m, as
follows:
(4)
Where h is the bandwidth while K is a kernel
function. The significance of bandwidth selection
and strategies for achieving an optimal value are
detailed in (Xiong
L. et al, 2007). The probability is
obtained by integrating the density function across
a continuous range. Assuming the PDF g(y), the
likelihood of y being smaller than c at a given
significance level, a is given by:
(5)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
238
As a result, the threshold of the monitoring statistics
Q can be determined using their corresponding PDF
estimates:
(6)
2.4 Contribution Plot
There are numerous approaches for fault isolation.
Contribution plots may be used for this purpose
(
Bougheloum W. et al, 2019
). This technique is often
based on the contribution rate from each variable to
determine which variable contributes the most to the
Q statistic; the contribution of variable j is computed
as follows:
(7)
Where :
2.5 Sensor Validity Index
This method is based on the principle of
reconstructing all the variables from the moment of
detection by calculating the validity indexes of the
sensors. The reconstructed measurement can be
obtained iteratively, estimated, and re-estimated
until convergence, as indicated in Figure 1. This is
why, and similarly, in order to restructure the faulty
data, it is essential to detect the fault in a unique.
Figure 1: The schema of the reconstruction principal used.
The method requires predicting the process
measurement by substituting the j
th
process variable
with the predicted one and continuing the procedure
until the algorithm converges as follows:
(8)
Where: ,
ϕ
T
j
is the
j
th
column of the identity matrix.
The Sensor Validity Index (SVI) is a sensor
effectiveness assessment in which, regardless of the
number of principal components of the faults, a
specified range should be present (
Bouzena
d
K.
et al.,
201
7), it is defined as follows:
(9)
SPE
j
is the j
th
quadratic prediction error calculated
after reconstruction, while SPE is the quadratic
global prediction error computed before
reconstruction. A faulty sensor’s validity index must
converge towards zero.
3 FAULT DETECTION BASED ON
SSAE-KNN
The suggested technique is consisted of offline
modelling and online monitoring. The specified
stages are explained as follows:
3.1 Offline Modeling
Offline modeling steps’ include the following:
1. Training data is collected and normalized under
normal conditions.
2. The model is trained using the SSAE cost
function, deep nonlinear and dynamic features are
extracted from the input data.
3. The monitoring statistic is built using the
extracted feature with the model’s reconstruction
error.
4. In the extracted feature, finding k nearest
neighbors for input data x.
5. Calculate the KNN squared for each sample. The
KNN squared distance of sample i ( 𝐷
) is
described as:
(10)
Where 𝑑
indicates the squared Euclidean distance
between sample i to its j
th
closest neighbor.
6. KDE establishes a 𝐷
threshold for fault
detection. The threshold 𝐷
with a significance level
α
may be established because the distribution of 𝐷
can be approximated by a noncentral chi-square
distribution (
Verdier G. et al.,
201
1).
3.2 Online Monitoring
The fault detection section for an incoming
unclassified sample x has five steps:
1. The samples used for the test is standardized.
2. The dynamic enhanced data are transmitted into
a well-trained SSAE, which calculates the
residual feature and reconstruction error.
3. D
and SPE statistical quantities are calculated.
4. The problem is detected using the threshold
Fault Diagnosis with Stacked Sparse AutoEncoder for Multimode Process Monitoring
239
determined in step 6. If the statistical quantity
exceeds the threshold, the fault has occurred.
5. Using the contribution plot and sensor validity
index SVI to identify the faulty sensor. To
provide a more intuitive picture, the flow chart of
the proposed multimode process monitoring
technique based on the Stacked Sparse
AutoEncoder and K nearest neighbour scheme is
summarized in Figure 2.
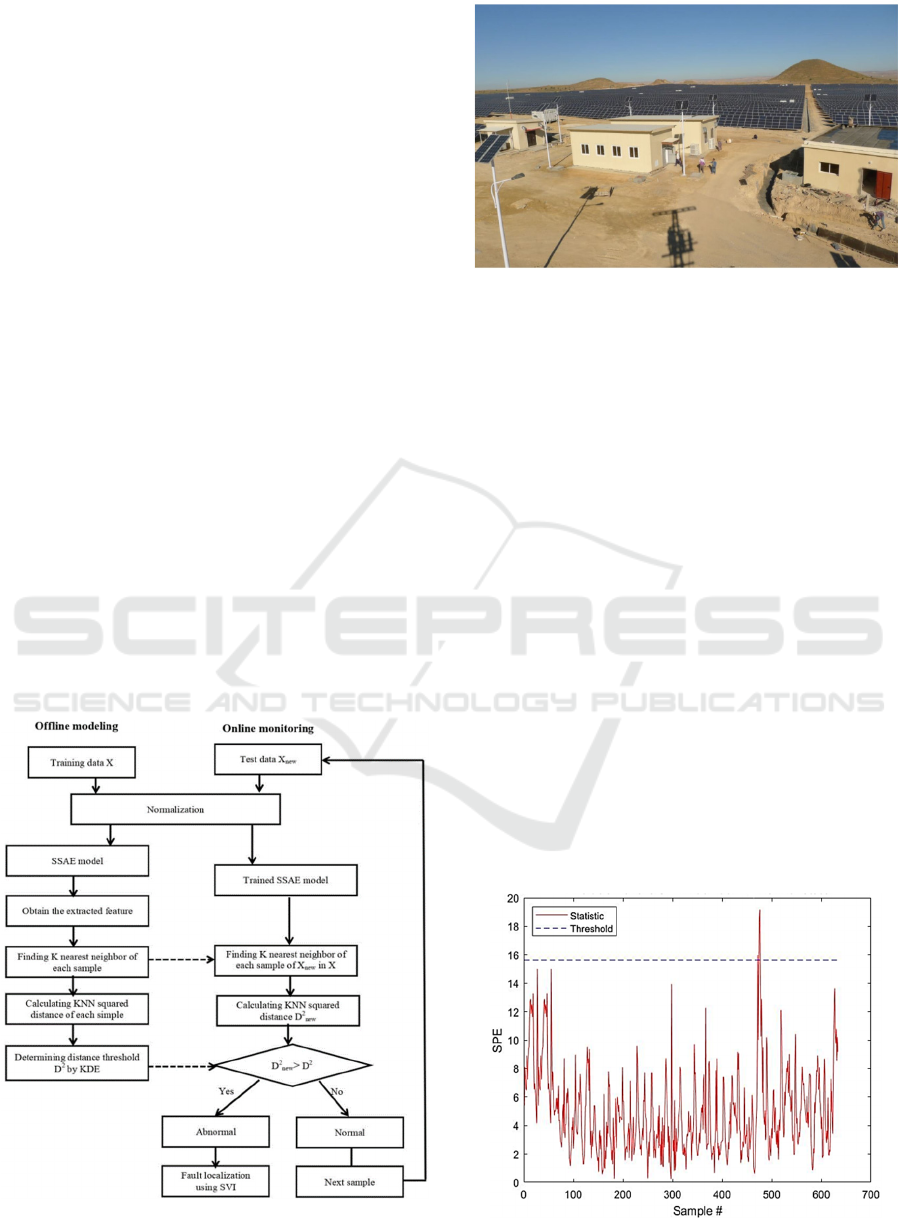
4 CASE STUDY OF
IMPLEMENTATION
4.1 Process Description Used
The case study is about the solar power plant of
Oued Keberit, which is located near the city of
Souk-Ahras in north-eastern Algeria; close the
Tunisian border, shown in Figure 3. It is located in
latitude 35
°
55
’
28
”
north and longitude 7
°
55
’
1
”
East
(Toumi R. et al, 2019). The temperature varies
between 22.9 and 26.3 degrees Celsius in the
summer and as low as 10.2 degrees Celsius in the
winter. This gives an ideal setting for solar energy
project development. In our study, the model inputs
consist of solar power plant parameters, the hidden
layer that represents learned features, and the output
layer with the same dimension of the input layer that
represents reconstruction (Soualmia A. et al., 2016).
Figure 2: Flow chart of proposed fault detection method.
Figure 3: Photovoltaic Power Station of Oued Kebrit.
To demonstrate the usefulness of the suggested
technique, we examine data from the grid-connected
photovoltaic solar plant at Oued Kebrit. This data
includes the following parameters: Total Radiation,
Temperature, Wind Speed, Humidity, and Pressure,
we have a total of 05 parameters, indicating that we
have five sensors monitoring the observations
throughout a thirty-day period (2018). To develop
the SSAE model, a data matrix X was constructed
using N = 633 observations indicating the process
normal functioning. The data in such a matrix are
centered and scaled using the data means and
standard deviations. For the monitoring model, a
vector of measures comprised of the 05 variables
described previously was selected.
4.2 Simulations Results
In this context, we will present the results of the
suggested multimode process monitoring technique,
which is primarily used to identify sensor problems.
To show the monitoring method’s validity and the
advantages of fault detection, we created a
multimode monitoring model using a dataset from a
Figure 4: Evolution of the SPE index in normal state.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
240
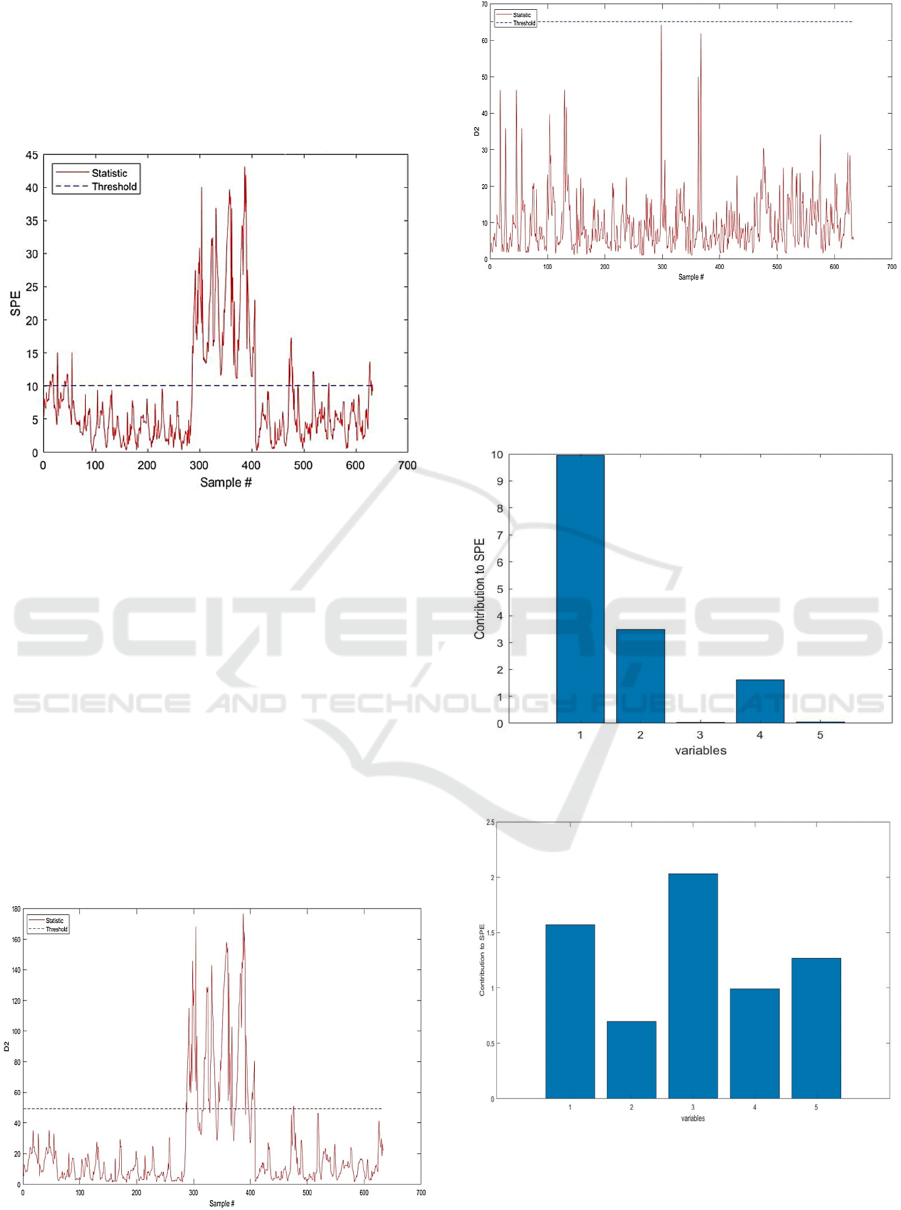
solar power plant that had five variables and 633
samples. Under normal conditions, both the standard
technique based on SPE statistics and the SSAE-
KNN monitoring statistics suggest that all samples
are contained within the relevant zones depicted in
Figure 4-5.
Figure 5: Evolution of the SPE index in faulty state.
After discovering a fault, it is required to determine
which sensor is faulty; this is accomplished using
the contribution plot. The evolution of the
contribution plots in the presence of a problem
affecting the first sensor measuring total radiation
and the fourth sensor measuring humidity is shown
in Figure 8(a)-(b). The usual technique fails to
identify the infected fourth sensor. Then, using the
reconstruction approach, we used the enhanced
sensor validity index (SVI). The fault localization of
all faulty variables is depicted in Figure 9(a)-(b).
Consequently, SVI based on reconstruction
approaches of the offending variable measures is
effectively used and gives better performance
compared to the conventional approach.
Figure 6: Evolution of the monitoring index based on
KNN in normal state.
Figure 7: Fault detection using SSAE-KNN.
The proposed SSAE-KNN method gives better
performance in fault detection, which appears
clearly in false alarm detection in the validation and
the test steps.
(a) Evolution of Contribution plot of the 1
st
sensor.
(b) Evolution of Contribution plot of the 4
th
sensor.
Figure 8: Localization of fault based on Contribution plot.
Fault Diagnosis with Stacked Sparse AutoEncoder for Multimode Process Monitoring
241
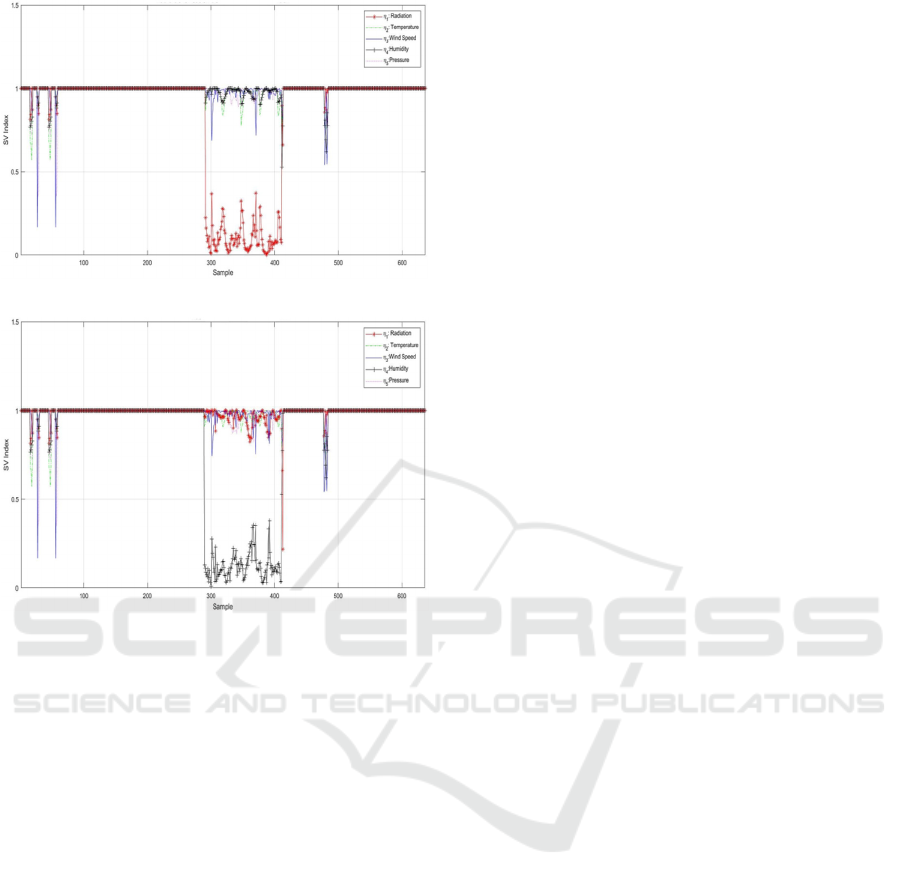
(a) Evolution of Sensor validity index of the 1
th
sensor.
(b) Evolution of Sensor validity index of the 4
th
sensor.
Figure 9: Localization of fault based on Sensor Validity
Index.
5 CONCLUSIONS
This work proposes a multimode process monitoring
approach based on the Stacked Sparse AutoEncoder
(SSAE) and K-Nearest Neighbour (KNN). The input
data is rebuilt using SSAE, and monitoring statistics
are generated using the KNN rule, with their related
thresholds determined using Kernel Density
Estimation (KDE). To detect malfunctioning
sensors, an improved Sensor Validity Index (SVI)
based on the reconstruction technique is proposed.
The experimental findings from a solar power plant
indicate the usefulness of the proposed system and
its ability to detect and diagnose sensor failures.
ACKNOWLEDGEMENT
This work is supported by the Directorate General of
Scientific Research and Technological Development
(DGRSDT) and Laboratory of Electrical Engineering
and Renewable Energy LEER of Algeria.
REFERENCES
Qin S. J., (2012) “Survey on data-driven industrial process
monitoring and diagnosis,” Annual Reviews in
Control, vol. 36, pp. 220–234.
Yin S., S. Ding X., Xie X., and Luo H., (2014) “A review
on basic data-driven approaches for industrial process
monitoring,” IEEE Transactions on Industrial
Electronics, vol. 61, pp. 6418–6428.
Hinton G. E. and Salakhutdinov R. R., (2006) “Reducing
the dimensionality of data with neural networks,”
Science, vol. 313, pp. 504–507.
Xu J., Xiang L., Liu Q., Gilmore H., Wu J., Tang J., and
Madabhushi A., (2016) “Stacked sparse autoencoder
(SSAE) for nuclei detection on breast cancer
histopathology images,” IEEE Transactions on
Medical Imaging, vol. 35, pp. 119–130.
Wang G., Liu J., Li Y., and Shang L., (2015) “Fault
detection based on diffusion maps and k-nearest
neighbor diffusion distance of feature space,” Journal
of Chemical Engineering of Japan, vol. 48, no. 9, pp.
756–765.
P. E. Odiowei and Y. Cao, (2010) “Nonlinear dynamic
process monitoring using canonical variate analysis
and kernel density estimations,” IEEE Transactions on
Industrial Informatics, vol. 6, pp. 36–45.
Yin J. and Yan X., (2019) “Mutual information–dynamic
stacked sparse autoencoders for fault detection,”
Industrial & Engineering Chemistry Research, vol. 58,
pp. 21614–21624, Nov. 2019.
Ren Z., Tang Y., and Zhang W., (2021) “Quality-related
fault diagnosis based on k-nearest neighbor rule for
non-linear industrial processes,” International Journal
of Distributed Sensor Networks, vol. 17, p.
155014772110559.
Xiong L., Liang J., and Qian J., (2007) “Multivariate
statistical process monitoring of an industrial
polypropylene catalyzer reactor with component
analysis and kernel density estimation,” Chinese Journal
of Chemical Engineering, vol. 15, pp. 524–532.
Bougheloum W. and Ramdani M., (2019) “Accurate
quality control charts via sparsityreconstruction for
multimode process monitoring,” International Journal
of Control, Energy and Electrical Engineering
(CEEE), vol. 11, pp. 8–11.
Bouzenad K. and Ramdani M., (2017) “Multivariate
statistical process control using enhanced bottleneck
neural network,” Algorithms, vol. 10, p. 49.
Verdier G. and Ferreira A., (2011) “Adaptive mahalanobis
distance and knearest neighbor rule for fault detection
in semiconductor manufacturing,” IEEE Transactions
on Semiconductor Manufacturing, vol. 24, pp. 59–68.
Toumi R., Kourd Y., and Ramdani M., (2019)“Data driven
photovoltaic power station monitoring using robust
sparse representation,” in 2019 1
st
International
Conference on Sustainable Renewable Energy
Systems and Applications (ICSRESA), IEEE.
Soualmia A. and Chenni R., (2016) “Modeling and
simulation of 15mw grid-connected photovoltaic system
using PV syst software,” in 2016 International
Renewable and Sustainable Energy Conference
(IRSEC), IEEE.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
242
