
Single-Experiment Reconstructibility of Boolean Control Networks
Revisited
Guisen Wu
1 a
and Jun Pang
2 b
1
School of Computer and Information Science, Southwest University, China
2
Faculty of Science, Technology and Medicine & Interdisciplinary Centre for Security, Reliability and Trust, University of
Luxembourg, Luxembourg
Keywords:
Boolean Control Networks, Reconstructibility, Observability, Verification Algorithms.
Abstract:
We first demonstrate that, BCNs’ single-experiment reconstructibility has three additional forms in addition
to its current definition, and briefly introduce the verification algorithms we design for these new definitions.
These definitions and algorithms bring the following improvements to BCNs’ control theory. First, the solution
algorithms of single-experiment reconstruction are enriched to cope with more different scenarios. Second,
the verification problem of single-experiment reconstructibility is simplified. Finally, the essential relationship
and difference between reconstruction and observation (which focuses on determining the initial state for a
BCN), is further clarified.
1 INTRODUCTION
Inspired by the Boolean-type actions in genetic cir-
cuits (Jacob and Monod, 1961), Boolean networks
(BNs) were proposed by Kauffman as a popular and
well-established framework for modelling non-linear
and complex biological systems (Kauffman, 1968).
The main advantage of BNs is its simplicity and yet
can be used to capture the important dynamic proper-
ties of biological systems, thus facilitating the mod-
elling of large systems as a whole. In a BN, the nodes
are denoted as binary variables, being either ‘ex-
pressed’ or ‘not expressed’ and activation/inhibition
regulations between them are described by Boolean
functions.
Boolean control networks (BCNs) is a natural ex-
tension of BNs with external regulations and pertur-
bations (Ideker et al., 2001). A BCN has three differ-
ent types of nodes, namely, input-nodes, state-nodes,
and output-nodes. Their value vectors are called the
BCN’s input, state, and output, respectively. The rela-
tionship between these three sets of nodes is described
by the BCN’s updating rules. BCNs have been applied
to various problems and typical examples including
abduction-based drug target discovery (Biane and De-
laplace, 2017), and functional and structural analysis
a
https://orcid.org/0000-0002-5868-3049
b
https://orcid.org/0000-0002-4521-4112
of signalling and regulatory networks (Kaufman et al.,
1999; Klamt et al., 2006). The widespread use has
led to vast attention on the research of BCNs’ con-
trol theory ((Akutsu et al., 2007; Cheng and Qi, 2009;
Zhao et al., 2010; Cheng et al., 2011; Fornasini and
Valcher, 2013; Su et al., 2019; Mandon et al., 2019;
Zhang et al., 2015a)).
In this paper, we focus on BCN reconstruction
which plays an important role in state observer de-
sign and controller synthesis of BCNs (Fornasini
and Valcher, 2013). We propose that BCN’s single-
experiment reconstructibility, which was considered
to have only one form (Zhang et al., 2020a), has
three other different but equivalent definitions, and
design verification algorithms for this new definitions
we proposed.
Before introducing BCN reconstruction, we dis-
cuss observation that is necessary for the quantita-
tive analysis of BCNs is of wide interest and remains
a topical issue ((Cheng and Qi, 2009; Zhao et al.,
2010; Cheng et al., 2011; Fornasini and Valcher,
2013; Zhang et al., 2020b; Zhu et al., 2021; Zhu et al.,
2022)). More specifically, observation is about how to
determine the initial state of a BCN by controlling its
inputs and observing its outputs (Zhang et al., 2020b).
Observation is further classified into three problems:
multiple-, single-, and arbitrary-experiment observa-
tion, to investigate how to determine the initial states
in three different situations, namely, (1) the BCN’s in-
Wu, G. and Pang, J.
Single-Experiment Reconstructibility of Boolean Control Networks Revisited.
DOI: 10.5220/0012161100003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 85-93
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
85

put can be controlled and initial state can be reset, (2)
input can be controlled and initial state cannot be re-
set, and (3) input cannot be controlled.
To study the solvability of these problems, five
types of observability Type-I, II, III, IV & V observ-
ability were proposed in the literature (Cheng and Qi,
2009; Zhao et al., 2010; Cheng et al., 2011; For-
nasini and Valcher, 2013; Wu et al., 2020). Type-I ob-
servability was proposed to formalise the solvability
of multiple-experiment observation problem, but was
later replaced by Type-II observability because Type-
II observability is easier to be satisfied (Zhang et al.,
2020b). Therefore, Type-II observability was named
as multiple-experiment observability. Type-I observ-
ability was then named as strong multiple-experiment
observability because it is stronger than Type-II ob-
servability. Type-III obser vability was considered as
single-experiment observability (Cheng et al., 2011;
Zhang et al., 2020b). More recently, a new notion
of Type-V observability, which is easier to be satis-
fied than Type-III observability, was proposed to re-
place it in (Wu et al., 2020). Thus, Type-III observabil-
ity is now named as strong single-experiment observ-
ability. Type-IV observability was defined to be the
single-experiment observability of BCNs (Fornasini
and Valcher, 2013).
Next, we continue to introduce BCNs’ reconstruc-
tion. Reconstruction was divided into two problems:
single- and arbitrary-experiment reconstruction, to
investigate how to determine the current states of a
BCN in two different situations, namely, (1) its input
can be controlled and (2) input cannot be controlled.
It makes no sense to study multiple-experiment re-
construction, because in different experiments, the in-
puts being fed to the BCN may be different, and then
the corresponding current states may also be differ-
ent (Zhang et al., 2020a). As the tasks to be performed
in reconstruction and observation are similar, recon-
structibility has high similarity in definition with ob-
servability. To formalise BCN’s reconstructibility in
the above mentioned two different situations, Type-I
& II reconstructibility that are the counterparts corre-
sponding to Type-IV & III observability, were proposed
in (Fornasini and Valcher, 2013; Zhang et al., 2015a).
In this paper, firstly, we propose three new types of
reconstructibility for BCNs. Since single-experiment
observability has been redefined as Type-V observabil-
ity in (Wu et al., 2020), we propose Type-III recon-
structibility as the counterpart corresponding to Type-
V observability. Moreover, we demonstrate that it
makes sense to study the counterparts (Type-IV & V
reconstructibility) corresponding to Type-I & II observ-
ability, even though these two types of observability
were proposed to study multiple-experiment obser-
Figure 1: The relationships between inputs, states, and out-
puts of BCNs.
vation. Secondly, we briefly introduce the verifica-
tion algorithms we design for these new types of re-
constructibility, and analyse the computational com-
plexity for them. We claim that with the proposal
of Type-V reconstructibility, the verification problem
of the BCNs’ single-experiment reconstructibility can
be greatly simplified.Finally, we formally prove that
Type-II, III, IV& V reconstructibility are equivalent, even
if they are the counterparts corresponding to Type-III,
V, I& II observability which are not equivalent.
The remainder of this paper is organised as fol-
lows. We introduce necessary notations and the for-
mal definition of BCNs in Section 2. In Section 3,
we formally define Type-III, IV & V reconstructibility
and introduce the new solution algorithm designed
for the single-experiment reconstruction problem of
BCNs. We then present the verification algorithms we
have designed for Type-III, IV & V reconstructibility in
Section 4. We summarise and compare the results on
reconstructibility and observability in Section 5. We
conclude the paper by discussing future research di-
rections in Section 6.
2 PRELIMINARIES
We first introduce the following necessary notations:
• B: the set of Boolean values {0,1},
• T: the set of discrete time domain which is de-
noted by the set of natural numbers,
• v
i
2
x
: the x-dimensional Boolean vector whose dec-
imal value is equal to i,
• V
2
x
: the set {v
0
2
x
,. .. ,v
2
x
−1
2
x
} of Boolean vectors.
A Boolean control network (BCN) can be de-
scribed by the following state equation and output
equation (Ideker et al., 2001):
s(t +1) = f (i(t),s(t))
o(t) = h(s(t))
(1)
where t ∈ T; i(t) ∈ B
ℓ
, s(t) ∈ B
m
, and o(t) ∈ B
n
de-
note the vectors input, state, and output, respectively,
at time t; f : B
ℓ
× B
m
7→ B
m
and h : B
m
7→ B
n
are
logical functions. The relation between inputs, states,
and outputs of a BCN can be illustrated in Fig. 1,
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
86

where 0, 1,. .. stand for time steps, i(0),i(1),.. . in-
puts, s(0),s(1),... states, o(0),o(1), ... outputs, and
arrows represent dependence. Moreover, as we repre-
sent an x-dimensional Boolean vector in the form v
i
2
x
,
the input set B
ℓ
, state set B
m
, and output set B
n
can
be replaced by V
L
, V
M
, and V
N
, respectively, where
L = 2
ℓ
, M = 2
m
, and N = 2
n
.
In order to discuss observability and recon-
structibility, we define the following classes of func-
tions to represent the relation between the input se-
quence, output sequence, and state sequence.
F
[t
0
,t]
: V
M
× (V
L
)
t−t
0
7→ (V
M
)
t−t
0
+1
,
F
[t
0
,t]
(s(t
0
),i(t
0
). .. i(t −1)) = s(t
0
). .. s(t),
(2)
H
[t
0
,t]
: V
M
× (V
L
)
t−t
0
7→ (V
N
)
t−t
0
+1
,
H
[t
0
,t]
(s(t
0
),i(t
0
). .. i(t −1)) = o(t
0
). .. o(t),
(3)
with t ≥ t
0
. For every state s(p) (t
0
< p ≤ t) in the
state sequence s(t
0
). .. s(t), s(p) = f (i(p − 1),s(p −
1)). For the output sequence o(t
0
). .. o(t), every o(p)
in it satisfies o(p) = h(s(p)).
Intuitively, these two classes of functions rep-
resent the way to calculate the state sequence
s(t
0
). .. s(t) and output sequence o(t
0
). .. o(t) of a
BCN, respectively, in the time interval [t
0
,t], by its
state s(t
0
) and input sequence i(t
0
). .. i(t −1).
Then, we introduce the way to calculate the possi-
ble state set S
ps
(t) of a BCN, which contains all pos-
sible valuations of the BCN’s state s(t) that can be
deduced at time step t. Firstly, we define the function
ζ(S,i, o) to show how to calculate the state set S
ps
(t)
for a BCN by the state set S
ps
(t −1), input i(t −1), and
output o(t). Before defining the function ζ(S,i,o), we
define the following function ξ(i,s).
ξ : (V
L
∪ {ε}) ×V
M
7→ V
M
,
ξ(i,s) =
f (i,s) i ̸= ε
s i = ε
.
(4)
The function ξ(i, s) is defined to describe how the
BCN’s state s is affected by its input i. Compared
with the updating function s(t + 1) = f (i(t),s(t)), this
function could capture how the state s changes when
the input i = ε. Then we define function ζ(S,i,o).
ζ : 2
V
M
× (V
L
∪ {ε}) × (V
N
∪ {ε}) 7→ 2
V
M
ζ(S,i, o) =
{ξ(i,s) | s ∈ S,h(ξ(i,s)) = o} o ̸= ε
{ξ(i,s) | s ∈ S} o = ε
(5)
Then, we recursively define the following class of
functions G
[t]
(i(0). .. i(t − 1),o(0)...o(t)) to present
how to determine the set S
ps
(t) for a BCN by
analysing its input sequence i(0) ...i(t − 1) and out-
put sequence o(0). .. o(t).
G
[t]
: V
L
t
×V
N
t+1
7→ 2
V
M
(6)
These functions satisfy the following conditions.
• When t = 0, i(0) ...i(t − 1) = ε,
G
[t]
(i(0). .. i(t −1),o(0)... o(t)) = ζ(V
M
,ε, o(0)).
• When t > 0,
G
[t]
(i(0). .. i(t −1),o(0). .. o(t))
= ζ(S
ps
(t −1),i(t − 1),o(t))
where
S
ps
(t −1)
= G
[t−1]
(i(0). .. i(t −2),o(0). .. o(t −1)).
3 REVISITING
RECONSTRUCTIBILITY
In this section, we begin with two existing types of
reconstructibility and then introduce three new types
of reconstructibility that we propose in this work.
Definition 1 (Type-I reconstructibility (Fornasini and
Valcher, 2013)). A BCN satisfies Type-I recon-
structibility if there exists a finite number k ∈ T such
that for any input sequence I ∈ (V
L
)
p
where p ≥ k,
H
[0,p]
(s
′
,I) ̸= H
[0,p]
(s,I) holds for any two distinct
states s, s
′
∈ V
M
if their corresponding current states
s(p) and s
′
(p) are different.
The main steps to determine the current state for a
BCN with this property are as follows:
(1) Input to a BCN with an input sequence I ∈ (V
L
)
p
that has sufficient length to distinguish all distinct
current states, and run the BCN to generate the
output sequence o(0). .. o(p);
(2) Return the current state s(p) which satisfies
s(p) ∈ G
[p]
(I,o(0) .. .o(p)).
Definition 2 (Type-II reconstructibility (Zhang et al.,
2015b)). A BCN satisfies Type-II reconstructibility
if there exists an input sequence I ∈ (V
L
)
p
for some
p ∈ T, such that for any two distinct states s, s
′
∈ V
M
,
H
[0,p]
(s
′
,I) ̸= H
[0,p]
(s,I) holds if their corresponding
current states s(p) and s
′
(p) are different.
Similarly, the reconstruction algorithm corre-
sponding to Type-II reconstructibility is shown as fol-
lows:
Single-Experiment Reconstructibility of Boolean Control Networks Revisited
87

(1) Input to a BCN with an input sequence I ∈ (V
L
)
p
which distinguishes all distinct current states, and
run the BCN to generate the output sequence
o(0). .. o(p);
(2) Return the current state s(p) which satisfies
s(p) ∈ G
[p]
(I,o(0) .. .o(p)).
Next, we introduce the new types of recon-
structibility. Firstly, as the BCNs’ single-experiment
observability was redefined as Type-V obser vability
in (Wu et al., 2020), we define Type-III reconstructibil-
ity as the counterpart corresponding to Type-V observ-
ability. For this purpose, we propose the set of state
sets Set
S
(k) for BCNs which denotes the set that, for
every state set S ∈ Set
S
(k), the set S satisfies that only
k time steps are required to determine a BCN’s cur-
rent state s(t +k) by one experiment when its state set
S
ps
(t) = S. We recursively define the set Set
S
(k) of
BCNs as the following steps.
• When k = 0, then Set
S
(k) = {S ∈ 2
V
M
||S| = 1}.
• When k > 0, then
Set
S
(k) = {S ∈ (2
V
M
−
S
k−1
p=0
Set
S
(p))|∃i ∈ V
L
·
∀o ∈ V
N
· ∃p ≤ (k − 1) · ζ(S, i,o) ∈ Set
S
(p)}.
Intuitively, when |S| = |S
ps
(t)| = 1, i.e. the BCN’s
state s(t) is determined, we need 0 time step to deter-
mine its current state. When k > 0, we use the sets
Set
S
(0),.. ., Set
S
(k − 1) that have been defined to de-
fine the set Set
S
(k). Firstly, as the set Set
S
(k) should
not intersect with the sets Set
S
(0),.. ., Set
S
(k − 1), we
have for every state set S ∈ Set
S
(k), the condition
S ∈ (2
V
M
−
S
k−1
p=0
Set
S
(p)) should be met. Secondly,
as a BCN should require more time steps to determine
its current state at t than at t +1, those following con-
ditions also need to be satisfied.
Then, we can define the function Γ(S) to represent
the number of time steps needed to determine a BCN’s
state s(t) by one experiment, when its possible state
set S
ps
(t) = S.
Γ : (2
V
M
− {
/
0}) 7→ (T ∪ {∞})
(7)
satisfies the following conditions.
• If there exists a finite number k which satisfies that
S ∈ Set
S
(k), then Γ(S) = k.
• Otherwise, Γ(S) = ∞.
Now, Type-III reconstructibility can be defiend.
Definition 3 (Type-III Reconstructibility). A BCN sat-
isfies Type-III reconstructibility if for every o ∈ V
N
,
ζ(V
M
,ε, o) ̸=
/
0 implies Γ(ζ(V
M
,ε, o)) ̸= ∞.
We provide a reconstruction algorithm corre-
sponding to Type-III reconstructibility as well.
(1) Obtain the state set S
ps
(0) of this BCN by its ini-
tial output o(0), i.e. S
ps
(0) := ζ(V
M
,ε, o(0)), and
set the set variable S by S
ps
(0), i.e. S := S
ps
(0).
(2) Feed the BCN with an input i which satisfies
max
o
′
∈{o|ζ(S,i,o)̸=
/
0}
Γ(ζ(S,i, o
′
)) + 1 = Γ(S)
and run it to generate the new output o(t).
(3) Determine the new S
ps
(t) by the input i, output
o(t), and set variable S, i.e. S
ps
(t) = ζ(S,i, o(t)),
and update the set variable S by S
ps
(t), i.e. S :=
S
ps
(t).
(4) If the cardinal number |S| = 1, then return the
BCN’s current state s(t) which satisfies s(t) ∈ S.
Otherwise, update t, i.e. t = t + 1 and go to step 2.
Finally, we define Type-IV & V reconstructibility
as the counterpart corresponding to Type-I & II observ-
ability, respectively. We show that, for a BCN that sat-
isfies these two properties, the current state of it can
also be determined by performing one experiment.
Definition 4 (Type-IV reconstructibility). A BCN satis-
fies Type-IV reconstructibility if for every state s ∈V
M
,
there exists an input sequence I ∈ (V
L
)
p
for some
p ∈ T such that for any state s
′
̸= s, H
[0,p]
(s
′
,I) ̸=
H
[0,p]
(s,I) holds if their corresponding current states
s(p) and s
′
(p) are different.
(1) Obtain the set S
ps
(0) of possible valuations of the
BCN’s initial state s(0) by its initial output o(0),
i.e. S
ps
(0) = ζ(V
M
,ε, o(0)), and set the set vari-
able S := S
ps
(0), the time variable T := 0, the
input sequence variable I := [] and the output se-
quence variable O := [], where [] denotes an empty
sequence.
(2) Assume one state s of the BCN under study as a
candidate initial state s(0) from set S.
(3) Feed the BCN with an input sequence I
′
∈ (V
L
)
p
that distinguishes the current state s(p) corre-
sponding to s(0) from other current states to gen-
erate new output sequence o(0)...o(p), and set
the time variable T := T + p, the input sequence
variable I := I + I
′
and the output sequence vari-
able O := O + o(0). .. o(p).
(4) Determine the new S
ps
(t) by the input sequence
I, output sequence O and reset variable S :=
S
ps
(t) = G
[T]
(I,O).
(5) If the cardinal number |S| = 1, then return the
BCN’s current state s(t) which satisfies s(t) ∈ S.
Otherwise, go to step 2.
Definition 5 (Type-V reconstructibility). A BCN sat-
isfies Type-V reconstructibility if for any two dis-
tinct states s, s
′
∈ V
M
, there exists an input sequence
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
88

I ∈ (V
L
)
p
for some p ∈ T such that H
[0,p]
(s
′
,I) ̸=
H
[0,p]
(s,I) holds if their corresponding current states
s(p) and s
′
(p) are different.
(1) Obtain the set S
ps
(0) of possible valuations of the
BCN’s initial state s(0) by its initial output o(0),
i.e. S
ps
(0) = ζ(V
M
,ε, o(0)), and set the set vari-
able S = S
ps
(0), the time variable T := 0, the input
sequence variable I := [] and the output sequence
variable O := [].
(2) Assume two distinct states s and s
′
of the BCN
under study as a candidate initial state s(0) and
s
′
(0) from the state set S.
(3) Feed the BCN with an input sequence I
′
∈ (V
L
)
p
that distinguishes the current states s(p) corre-
sponding to s(0) from s
′
(0) to generate new out-
put sequence o(0)...o(p), and set the time vari-
able T := T + p, the input sequence variable I :=
I + I
′
and the output sequence variable O := O +
o(0). .. o(p).
(4) Determine the new S
ps
(t) by the input sequence I,
output sequence O and reset the state set variable
S := S
ps
(t) = G
[T]
(I,O).
(5) If the cardinal number |S| = 1, then return the
BCN’s current state s(t) which satisfies s(t) ∈ S.
Otherwise, go to step 2.
In the above two algorithms, we perform mul-
tiple consecutive experiments without resetting the
BCN’s initial state. These successive multiple ex-
periments can therefore be considered as single ex-
periment. For this reason, Type-IV reconstructibility
and Type-V reconstructibility can be utilised to study
the BCNs’ single-experiment reconstruction. This re-
flects the difference between the reconstruction and
observation, that will further compared in Section 5.
Now we discuss how the above three algorithms
enrich the solution of BCN’s single-experiment re-
construction. Firstly, by using the reconstruction al-
gorithm corresponding to Type-III reconstructibility,
we can determine the current state for a BCN in
the shortest possible time steps, which reduces the
cost of experimentation. Secondly, as the compu-
tational cost for verifying Type-V reconstructibility is
lower than that for Type-II reconstructibility (will be
discussed Section 4), the reconstruction of more and
larger BCNs can be solved.
4 VERIFICATION OF
RECONSTRUCTIBILITY
In this section, we introduce the verification algo-
rithms we design for Type- III, IV & V reconstructibility.
As the reconstructibility and observability of
BCNs have high similarity in their definitions, the ver-
ification algorithm for reconstructibility can be ob-
tained by modifying the corresponding observabil-
ity’s algorithm. As a consequence, the computational
complexity of their verification algorithms remains
the same. For instance, the verification algorithms
that are based on the deterministic finite automata
(DFA) for Type-I & II reconstructibility as introduced
in (Zhang et al., 2020a) were obtained by modifying
the verification algorithms of Type-IV & III observabil-
ity provided in (Zhang et al., 2020b), and have the
same computational complexity as the latter two. Fol-
lowing this common practice, we design the verifica-
tion algorithm for Type-III reconstructibility based on
the verification algorithm of Type-V observability pro-
posed in (Wu et al., 2020), and the verification algo-
rithms for Type-IV & V reconstructibility based on the
verification algorithms of Type-I & II observability in-
troduced in (Zhang et al., 2020b). Then, the compu-
tational complexity of them can be easily obtained by
referring to the results of the papers (Wu et al., 2020;
Zhang et al., 2020b).
Given a BCN with ℓ input-nodes, m state-nodes,
and n output-nodes, the computational complexity of
the verification algorithm for Type-III reconstructibility
is O(2
2
m
+ℓ−1
). For Type-IV reconstructibility, the com-
putational complexity of its verification algorithm is
O(2
2
2m−1
ℓ
) (Zhang et al., 2020b).
For Type-V reconstructibility, we actually design
two algorithms for verifying it. The first one
is based on DFAs, with computational complexity
O(2
4m+ℓ−2
). For every two distinct current states of
the BCN with Type-V reconstructibility, the input se-
quence that distinguishes them can be obtained from
the verification result of this algorithm. The compu-
tational complexity of this algorithm is smaller than
the existing verification algorithm (with the computa-
tional complexity of O(2
2
2m−1
l
) (Zhang et al., 2020a))
for Type-II reconstructibility that provides the input
sequence to distinguish all different current states.
The second one we design is based on graph the-
ory, and its computational complexity is O(2
2m+ℓ−1
)
which is equivalent to the computational complexity
of the optimised verification algorithm for Type-II re-
constructibility as introduced in (Zhang et al., 2020a).
However, this algorithm and the optimised verifica-
tion algorithm for verifying Type-II reconstructibil-
ity (Zhang et al., 2020a) can only provide an an-
swer whether the BCN to be verified satisfies single-
experiment reconstructibility or not. In other words,
if and only if the verification result of the second algo-
rithm shows that the BCN under study satisfies Type-
V reconstructibility, we need the first one to obtain the
Single-Experiment Reconstructibility of Boolean Control Networks Revisited
89
input sequences that distinguish the pairs of different
current states. This also explains why the first one is
more complex.
In the following, we mainly focus on the first
verification algorithm we design for Type-V recon-
structibility and give its details.
1
Our main idea is
to construct the weighted pair graph for a BCN first,
then construct the DFA for the pairs of different states
that produce the same output from the weighted pair
graph, and finally obtain the input sequences that
distinguish the pairs of different current states from
the DFA. We need to first introduce the notion of
weighted directed graph for BCNs.
Definition 6 (Weighted Pair Graph (Zhang et al.,
2020a)). Given a BCN, a weighted directed
graph G = (V ,E,W ), where V denotes the
vertex set, E ⊂ V × V denotes the edge set,
and W denotes the weight function, is called
the weighted pair graph of the BCN if V =
{{s,s
′
}|s,s
′
∈ V
M
,s ̸= s
′
,h(s) = h(s
′
)}, for all
[{s
1
,s
′
1
},{s
2
,s
′
2
}] ∈ V × V , [{s
1
,s
′
1
},{s
2
,s
′
2
}] ∈ E iff
there exists i ∈ V
L
such that f (i,s
1
) = f (i,s
2
) and
f (i,s
′
1
) = f (i,s
′
2
) or f (i,s
1
) = f (i,s
′
2
) and f (i,s
′
1
) =
f (i,s
2
); for all edges e = [{s
1
,s
′
1
},{s
2
,s
′
2
}] ∈ E,
W (e) = {i ∈ V
L
| f (i,s
1
) = f (i,s
2
) and f (i,s
′
1
) =
f (i,s
′
2
) or f (i,s
1
) = f (i,s
′
2
) and f (i,s
′
1
) = f (i,s
2
)}.
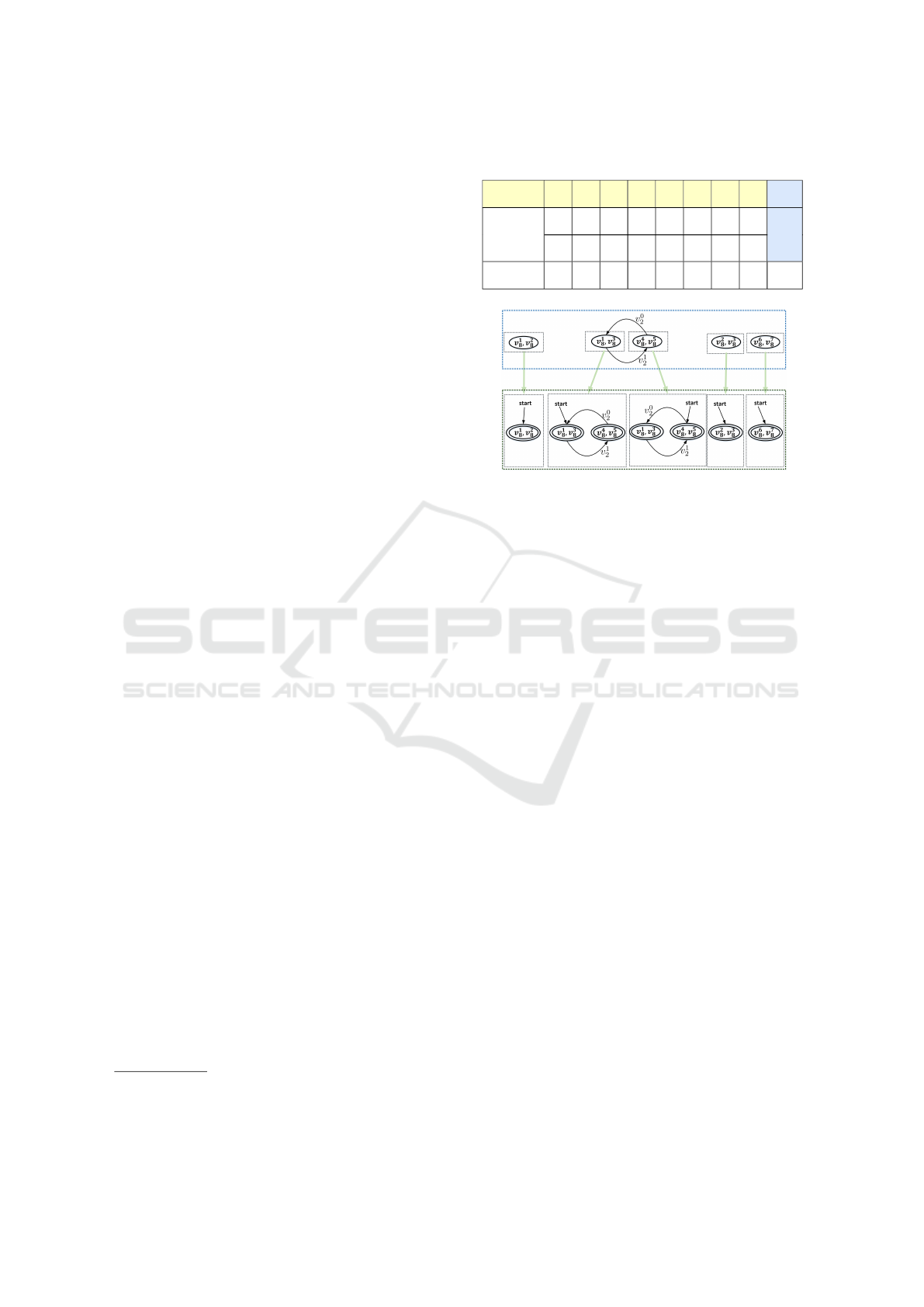
After introducing the notions of weighted pair
graph, we use the BCN shown in Table 1 as an ex-
ample to illustrate how to utilise them to obtain the
input sequences that distinguish the pairs of different
current states for a BCN which satisfies Type-V recon-
structibility. For this BCN, its weighted pair graph is
shown the top part of Fig. 2, and all the DFA con-
structed from the graph are shown in the lower part of
this figure. For every vertex {s
i
,s
′
i
} (e.g. {v
1
8
,v
3
8
}) in
the weighted pair graph, we construct a DFA A
i
(the
second DFA shown in the lower part of Fig. 2) for it.
In this DFA, the vertex {s
i
,s
′
i
} (e.g. {v
1
8
,v
3
8
}) is the
start state q
0
. The other states of the DFA A
i
are com-
posed of the vertices ({v
1
8
,v
2
8
} and {v
4
8
,v
5
8
}) reach-
able by {s
i
,s
′
i
} ({v
1
8
,v
3
8
}), in the weighted pair graph.
For every two state q (e.g. {v
1
8
,v
2
8
}) and q
′
({v
4
8
,v
5
8
})
in this DFA, q
′
= σ(q,a) holds if their correspond-
ing vertices are connected in the weighted pair graph.
Moreover, all states (e.g. {v
1
8
,v
2
8
} and {v
4
8
,v
5
8
}) in the
DFA A
i
are accepting states. Then, for the pair of dif-
ferent BCN’s states {s
i
,s
′
i
} ({v
1
8
,v
2
8
}), every word w ∈
L(A
i
) (in this case, L(A
i
) = (v
1
2
,v
0
2
)
∗
(ε∪ v
1
2
)) accepted
by this DFA, is the input sequence that could not dis-
tinguish the corresponding current BCN’s states of the
1
Due to the page limit, we will not show the details of
other verification algorithms we briefly mentioned in this
paper.
Table 1: A BCN used to illustrate the verification algorithm.
s(t) v
0
8
v
1
8
v
2
8
v
3
8
v
4
8
v
5
8
v
6
8
v
7
8
i(t)
v
2
8
v
3
8
v
3
8
v
6
8
v
1
8
v
3
8
v
4
8
v
3
8
v
0
2
s(t +1)
v
7
8
v
5
8
v
1
8
v
4
8
v
2
8
v
6
8
v
0
8
v
0
8
v
1
2
o(t) v
0
4
v
1
4
v
1
4
v
1
4
v
2
4
v
2
4
v
3
4
v
3
4
·
Figure 2: The weighted directed graph and DFAs con-
structed for the BCN shown in Table 1.
states (i.e. v
1
8
and v
2
8
), because the accepting state
σ
∗
(q
0
,w) of this DFA denotes the pair of different
BCN’s states ({v
1
8
,v
2
8
} or {v
4
8
,v
5
8
}) that produce the
same output. Thus, the language L = Σ
∗
− L(A
i
) con-
tains all input sequences that can distinguish the cor-
responding current states of s
i
and s
′
i
(e.g. v
1
8
and
v
3
8
). If the language L = Σ
∗
−L(A
i
) =
/
0, which means
L(A
i
) = Σ
∗
, then there is no input sequence can be
used to distinguish the corresponding current states
of s
i
and s
′
i
, this BCN thus does not satisfy Type-V re-
constructibility. However, if the BCN to be verified
does not satisfy Type-V reconstructibility, this algo-
rithm would not be used since the second algorithm
we design (mentioned in the previous paragraphs)
would show the verification result.
Finally, we analyse the computational complexity
of this algorithm. For a BCN, for every two different
initial states s
i
and s
′
i
, the size of the DFA A
i
is no
greater than that of the weighted pair graph. Since
at most 2
m
(2
m
− 1)/2 DFA need to be checked and
the size of the graph is O(2
2m+l−1
), the computational
complexity of this algorithm is O(2
4m+l−2
).
5 COMPARING
RECONSTRUCTIBILITY AND
OBSERVABILITY
Before comparing the reconstructibility and observ-
ability of BCNs, we need to present all five existing
types of observability. The initial state determining
algorithms corresponding to all five types of observ-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
90

ability will be omitted due to the page limit. Type-I &
II observability were proposed to study the solvability
of the BCNs’ multiple-experiment observation.
Definition 7 (Type-I observability (Cheng and Qi,
2009)). A BCN satisfies Type-I observability if for
every states s ∈ V
M
there exists an input sequence
I ∈ (V
L
)
p
for some p ∈ T, such that for any state s
′
̸= s,
H
[0,p]
(s
′
,I) ̸= H
[0,p]
(s,I).
Type-I observability was later replaced by Type-II
observability (Zhang et al., 2020b).
Definition 8 (Type-II observability (Zhao et al.,
2010)). A BCN satisfies Type-II observability if for
any two distinct states s, s
′
∈ V
M
there exists an in-
put sequence I ∈ (V
L
)
p
for some p ∈ T, such that
H
[0,p]
(s
′
,I) ̸= H
[0,p]
(s,I).
Type-III & V observability were proposed to re-
search single-experiment observation.
Definition 9 (Type-III observability (Cheng et al.,
2011)). A BCN satisfies Type-III observability if there
exists an input sequence I ∈ (V
L
)
p
for some p ∈
T, such that for any two distinct states s, s
′
∈ V
M
,
H
[0,p]
(s
′
,I) ̸= H
[0,p]
(s,I).
Type-V observability was proposed to redefine
single-experiment observability. As the state s(t) can
be guaranteed to be determined in a finite time steps
of k, by performing one experiment if and only if
• |S
ps
(t +k)| = 1, i.e. s(t + k) is determined.
• For every t
0
: t + 1 ≤ t
0
≤ t + k, for every s ∈
S
ps
(t
0
), there exists only one s
′
∈ S
ps
(t
0
− 1) that
satisfies s = f (i(t
0
−1),s
′
), such that s(t
0
−1) can
be uniquely determined by s(t
0
) and i(t
0
−1). The
state s(t) then can be uniquely determined step by
step by s(t +k) and i(t). .. i(t +k − 1).
The authors of (Wu et al., 2020) proposed the
set of state sets
˙
Set
S
(k) for BCNs to denote the set
that, for every state set S ∈
˙
Set
S
(k), the set S satis-
fies that only k time steps are required to determine a
BCN’s state s(t) by one experiment when its state set
S
ps
(t) = S.
˙
Set
S
(k) is recursively determined:
• When k = 0, then
˙
Set
S
(k) = {S ∈ 2
V
M
||S| = 1}.
• When k > 0, then
˙
Set
S
(k) = {S ∈ (2
V
M
−
S
k−1
p=0
˙
Set
S
(p))|∃i ∈ V
L
·
(|ζ(S,i, ε)| = |S|)&(∀o ∈ V
N
· ∃p ≤ (k − 1) ·
ζ(S,i, o) ∈
˙
Set
S
(p))}.
Intuitively, when |S| = |S
ps
(t)| = 1, i.e. s(t) is de-
termined, we need 0 time step to determine it. Thus,
we set
˙
Set
S
(k) = {S ∈ 2
V
M
||S| = 1} when k = 0. When
k > 0, we use the sets
˙
Set
S
(0),.. .,
˙
Set
S
(k − 1) that
have been defined to define the set
˙
Set
S
(k). Firstly,
as the set
˙
Set
S
(k) should not intersect with the sets
˙
Set
S
(0),.. .,
˙
Set
S
(k − 1), we have for every state set
S ∈
˙
Set
S
(k), the condition S ∈ (2
V
M
−
S
k−1
p=0
˙
Set
S
(p))
should be satisfied. Secondly, as the BCN’s state s(t)
should be determined by its state s(t + 1) and input
i(t), those following conditions also need to be satis-
fied as we discussed in the previous paragraph.
Now, the function
˙
Γ(S) to represent the number of
time steps needed to determine a BCN’s state s(t) by
one experiment, when its state set S
ps
(t) = S, can be
defined as follows.
˙
Γ : (2
V
M
− {
/
0}) 7→ (T ∪ {∞})
(8)
satisfies the following conditions.
• If there exists a finite number k which satisfies that
S ∈
˙
Set
S
(k), then
˙
Γ(S) = k.
• Otherwise,
˙
Γ(S) = ∞.
Thus, the BCNs’ single-experiment observability
can be defined as the following Type-V observability.
Definition 10 (Type-V observability (Wu et al., 2020)).
A BCN satisfies Type-V observability if for every pos-
sible S
ps
(0) of this BCN,
˙
Γ(S
ps
(0)) ̸= ∞.
Finally, we introduce Type-IV observability.
Definition 11 (Type-IV observability (Fornasini and
Valcher, 2013)). A BCN satisfies Type-IV observabil-
ity if there exist a finite number k ∈ T such that for any
input sequence I ∈ (V
L
)
p
where p ≥ k, H
[0,p]
(s
′
,I) ̸=
H
[0,p]
(s,I) holds for any two distinct states s, s
′
∈ V
M
.
Now we can compare reconstructibility and ob-
servability for BCNs. Firstly, for every type of observ-
ability and the reconstructibility which as the coun-
terpart of this type of observability, this type of ob-
servability implies the counterpart of it. The reason
is that once the initial state of a BCN can be deter-
mined, its current can also be determined by the ini-
tial state and inputs of the BCN. Secondly, all types of
observability are not equivalent. The relationship be-
tween them is shown in Fig. 3, where arrows means
“implies”. Thirdly, the four types of reconstructibility
namely Type-II, III, IV & V reconstructibility are equiv-
alent, which is formuated by the following theorem.
Theorem 1. Type-II, III, IV & V reconstructibility are
equivalent.
Due to space limitation, we omit the detailed
proof of this main theorem. Intuitively, it can be
proved by showing that Type-V reconstructibility im-
plies Type-II reconstructibility. This proposition can
be easily proved by constructing an input sequence
that distinguishes all current states for a BCN with
Single-Experiment Reconstructibility of Boolean Control Networks Revisited
91

Figure 3: The relationships between all types of the BCNs’
observability and reconstructibility.
Type-V reconstructibility. The propositions that the re-
constructibilities Type-II implies Type-III, Type-III im-
plies Type-IV, and Type-IV implies Type-V are obvi-
ous. Therefore, all these properties are equivalent,
and the relation between all types of observability
and reconstructibility can be illustrated in Fig. 3. It
is worth noting that, successive multiple experiments
can therefore be considered as single experiment in
the reconstruction of a BCN, is the main reason for
the difference between these two problems.
6 CONCLUSION AND FUTURE
WORK
It still requires a significant amount of computa-
tional overhead to verify the single-experiment recon-
structibility for large scale BCNs, due to the com-
putational complexity we have discussed in the pa-
per. Thus, in future, we plan to improve the scala-
bility of the verification algorithm for BCNs’ single-
experiment reconstructibility. We plan to research
whether it is possible to determine the current state
for a BCN, without any information given in advance,
about which input should be fed to the BCN at every
time step. If the answer to this question is positive, the
verification of the single-experiment reconstructibil-
ity of BCN will be further simplified, and the com-
putational complexity of the corresponding algorithm
will also be reduced.
REFERENCES
Akutsu, T., Hayashida, M., Ching, W. K., and Ng, M. K.
(2007). Control of Boolean networks: hardness results
and algorithms for tree structured networks. Journal
of Theoretical Biology, 244(4):670.
Biane, C. and Delaplace, F. (2017). Abduction based drug
target discovery using Boolean control network. In
Proceedings of the 15th International Conference on
Computational Methods in Systems Biology (CMSB),
volume 10545 of Lecture Notes in Computer Science,
pages 57–73. Springer-Verlag.
Cheng, D. and Qi, H. (2009). Controllability and ob-
servability of Boolean control networks. Automatica,
45(7):1659–1667.
Cheng, D., Qi, H., and Li, Z. (2011). Identification of
Boolean control networks. Automatica, 47(4):702–
710.
Fornasini, E. and Valcher, M. E. (2013). Observability, re-
constructibility and state observers of Boolean control
networks. IEEE Transactions on Automatic Control,
58(6):1390–1401.
Ideker, T., Galitski, T., and Hood, L. (2001). A new ap-
proach to decoding life: systems biology. Annual
Review of Genomics and Human Genetics, 2(1):343–
372.
Jacob, F. and Monod, J. (1961). Genetic regulatory mecha-
nisms in the synthesis of proteins. Journal of Molecu-
lar Biology, 3(3):318–356.
Kauffman, S. A. (1968). Metabolic stability and epigene-
sis in randomly constructed genetic nets. Journal of
Theoretical Biology, 22(3):437–467.
Kaufman, M., Andris, F., and Leo, O. (1999). A logical
analysis of t cell activation and anergy. Proceedings of
the National Academy of Sciences, 96(7):3894–3899.
Klamt, S., Saez-Rodriguez, J., Lindquist, J. A., Simeoni,
L., and Gilles, E. D. (2006). A methodology for the
structural and functional analysis of signaling and reg-
ulatory networks. BMC Bioinformatics, 7(1):56.
Mandon, H., Su, C., Haar, S., Pang, J., and Paulev
´
e, L.
(2019). Sequential reprogramming of Boolean net-
works made practical. In Proceedings of the 17th In-
ternational Conference on Computational Methods in
Systems Biology (CMSB), volume 11773 of Lecture
Notes in Computer Science, pages 3–19. Springer-
Verlag.
Su, C., Paul, S., and Pang, J. (2019). Controlling large
Boolean networks with temporary and permanent per-
turbations. In Proceedings of the 23rd International
Symposium on Formal Methods (FM), volume 11800
of Lecture Notes in Computer Science, pages 707–
724. Springer-Verlag.
Wu, G., Dai, L., Liu, Z., Chen, T., and Pang, J. (2020).
Online observability of Boolean control networks. In
Proceedings of the 21st World Congress of the Inter-
national Federation of Automatic Control, volume 53
of IFAC-Papers On Line, pages 1057–1064. IFAC.
Zhang, K., Zhang, L., and Rong, S. (2015a). A weighted
pair graph representation for reconstructibility of
Boolean control networks. SIAM Journal on Control
and Optimization, 54(6).
Zhang, K., Zhang, L., and R.Su (2015b). A weighted pair
graph representation for reconstructibility of boolean
control networks. SIAM Journal on Control and Opti-
mization, 54.
Zhang, K., Zhang, L., and Xie, L. (2020a). Detectability of
Boolean Control Networks, pages 105–115. Springer-
Verlag.
Zhang, K., Zhang, L., and Xie, L. (2020b). Observability of
Boolean Control Networks, pages 87–104. Springer-
Verlag.
Zhao, Y., Qi, H., and Cheng, D. (2010). Input-state inci-
dence matrix of Boolean control networks and its ap-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
92

plications. Systems & Control Letters, 59(12):767–
774.
Zhu, S., Lu, J., Lin, L., and Liu, Y. (2022). Minimum-time
and minimum-triggering observability of stochastic
Boolean networks. IEEE Transactions on Automatic
Control, 67(3):1558–1565.
Zhu, S., Lu, J., Zhong, J., Liu, Y., and Cao, J. (2021). On
the sensors construction of large Boolean networks via
pinning observability. IEEE Transactions on Auto-
matic Control, pages 1–1.
Single-Experiment Reconstructibility of Boolean Control Networks Revisited
93
