
Driver Attention Estimation Based on Temporal Sequence Classification
of Distracting Contexts
Raluca Didona Brehar
a
, George Coblis¸an, Attila F
¨
uzes
b
and Radu D
˘
anescu
c
Technical University of Cluj-Napoca, Romania
Keywords:
Object Detection, Distracted Driving, Driver Monitoring.
Abstract:
A framework for distracted driving level or the degree of attention which a driver pays to the act of driving,
is presented in this paper. It uses visual based action recognition models applied on color images that capture
the driver’s face and hands. The proposed approach contains a temporal sequence model that aggregates
information from two object detectors which recognize distracting contexts generated by (1) distracting objects
that appear in the images such as mobile devices and (2) the face orientation of the driver, the hands and their
position with respect to the wheel. The driver’s attention score is predicted using the temporal sequence
classification model, a long short term memory, that considers time series features computed based on object
detection information.
1 INTRODUCTION
According to the United States Department of Trans-
portation
1
, ”distracted driving is any activity that di-
verts attention from driving”. It includes ”talking or
texting on the phone, eating and drinking, talking to
people in the vehicle, fiddling with the stereo, enter-
tainment or navigation system, anything that takes the
attention of the driver away from the task of safe driv-
ing. The emergence of mobile devices and other dis-
tracting objects that can be used inside the car has lead
to an increased level of careless driving. According to
the World Health Organization
2
drivers using mobile
phones are approximately four times more likely to
be involved in a crash than drivers not using a mobile
phone because this type of distraction slows down the
reaction time and diminishes the drivers’ capability
to keep the correct lane or to estimate distances with
respect to other cars or pedestrians. A direction of
contributions for decreasing the number of accidents
due to low driver attention resides in the development
of systems that can detect and monitor drivers’ be-
haviour while driving and alert them if the attention is
a
https://orcid.org/0000-0003-0978-7826
b
https://orcid.org/0000-0002-9330-1819
c
https://orcid.org/0000-0002-4515-8114
1
https://www.nhtsa.gov/risky-driving/distracted-
driving
2
https://www.who.int/news-room/fact-
sheets/detail/road-traffic-injuries
significantly reduced and they are distracted by vari-
ous actions or objects.
This paper focuses on predicting the driver’s level
of attention. Even if in general ”attention” is a com-
plex cognitive process, an essential process in hu-
mans’ every day life, for the context of this paper, the
drivers’ attention degree (score) is considered to be
inversely proportional to the distraction degree of
the driver. If the driver is not distracted then he pays
full attention to the driving process, having an atten-
tion level of 1. If the driver talks to the phone, then he
is distracted and his attention level is smaller.
The main contribution of the paper resides in the
development of a temporal multi-view deep learning
based framework for driver attention estimation based
on the aggregation of multiple single view context
classification models that rely on object detection data
from yolo-based (Wang et al., 2022) object detectors.
They provide face orientation information, hands on
wheel information and distracting objects presence.
The steps performed in achieving the original contri-
butions consist in
1. The augmentation of a benchmark dataset used
for driver attention monitoring with information
about distracting contexts that are related on one
hand to object’s presence (mobile phones, bottles,
cans), and on the other hand are related to the po-
sition of the hands with respect to the wheel and
the face orientation (looking or not looking at the
road).
578
Brehar, R., Cobli¸san, G., Füzes, A. and D
ˇ
anescu, R.
Driver Attention Estimation Based on Temporal Sequence Classification of Distracting Contexts.
DOI: 10.5220/0012160200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 578-585
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2. Training of object detection models based on
yolov7 (Wang et al., 2022) for inferring (i) loca-
tion information of distracting objects, (ii) infor-
mation about hands location with respect to the
wheel and (iii) data about the driver’s face loca-
tion.
3. The development of a multi-view information ag-
gregation model that fuses the data provided by
the object detectors and forms a feature vector of
object locations and their detection scores.
4. The development of a temporal multi-view deep
learning based framework for driving attention
score prediction that comprises a long short term
memory trained on the feature vector provided by
the information aggregation model.
5. The augmentation of the benchmark dataset with
driver attention score information.
The proposed model is able to identify the con-
texts that distract the driver such as holding one hand
on the steering wheel or both hands on the wheel, the
presence of objects used by the driver such as a phone,
a bottle or a comb, and whether the driver is looking
at the road or at other elements inside the car. This
data can be further processed and analysed to obtain
information about the driving behaviour, such as de-
tailed statistics related to the attention level reported
over a time interval that aim to illustrate all identified
actions in accordance with their duration. The devel-
oped model provides good results for the benchmark
dataset reaching mean squared error of 0.01.
2 RELATED WORK
Most of the work in the field of driver monitor-
ing comprises multi view multimodal approaches that
analyse the drivers’ face, body posture and actions
captured with several types of sensors that provide
color or greyscale data, infrared or depth data. From
this data, features are extracted over time and the at-
tention level is predicted by means of standard or deep
based classification methods.
For example the upper-body pose is used by
(Borghi et al., 2017) to monitor the driver’s attention
level. They propose a regression neural network com-
posed of three independent convolutional nets which
are fused by a single fusion layer whose purpose is
to determine the upper body pose by depth informa-
tion. This pose estimation network is completed by
a model that reconstructs gray-level face images di-
rectly from depth maps. Their work is extended by
(Borghi, 2018) that combine deep learning methods
and depth maps for head pose estimation and facial
landmark detection for driver attention monitoring. A
multi-modal dataset is provided by (Jha et al., 2020)
that use a Fi-Cap device that continuously tracks the
head movement of the driver for providing annota-
tions for head pose algorithms, RGB cameras and a
time-of-flight depth cameras for recording the scenes
where the driver performs common secondary activ-
ities such as navigation using a smart phone and op-
erating the in-car infotainment system. The solution
provides deep learning based approaches for gaze es-
timation and head pose estimation.
Other approaches are directed towards gaze analy-
sis for driver state estimation. The challenges of such
methods reside in the difficulty of a robust gaze es-
timation due to large head movement. A gaze zone
random forest classifier is proposed by (Wang et al.,
2017) that use head vectors computed with pose from
orthography and eye image features extracted from
facial landmarks and 3D face models. A multi-state
driver’s face monitoring system is proposed by (Hu
et al., 2022) that recognize blinking and yawning be-
haviours, and also use deep learning based architec-
tures for head pose estimation and gaze estimation.
Gaze is also used to predict the attention map of
the driver. (Rong et al., 2022) integrate an attention
prediction module into a pre-trained object detection
framework and predict the attention in a grid-based
style using ResNet3D and having as input the front
and top depth and infrared driver images.
(Muhrer and Vollrath, 2011) performed a study
in order to investigate how different distraction con-
ditions influence the anticipation of events in a car-
following scenario, considering also different ma-
noeuvres of a preceding car, in order to generate var-
ious anticipations and therefore a different adaptation
of the driving behaviour. Additionally, a cognitive
and a visual secondary task were introduced.
Recently the AI City Challenge (Naphade et al.,
2023), (Naphade et al., 2022) introduced as one of the
main tracks the naturalistic driving action recognition
having as objective the classification of distracted be-
haviour activities executed by the driver in a given
time frame. To achieve the goals of the challenge
several solutions were proposed. (Zhou et al., 2023)
describe a solution based on large model fine-tuning
based on Vision Transformers combined with a multi-
view multi-fold ensemble to produce fine-grained
clip-level classification. (Alyahya et al., 2022) pro-
pose a temporal driver action localization framework
that consists of three stages: (i) preprocessing, which
performs driver tracking and video segmentation, (ii)
action classification based on SlowFast as an action
classifier with Resnet50 as the backbone; and (iii) the
temporal action localization. A key point based ap-
Driver Attention Estimation Based on Temporal Sequence Classification of Distracting Contexts
579
proach is described by (Vats and Anastasiu, 2022) that
extract complex static and movement-based features
for predicting a sequence of key-frame activities. An
improved version of multi-scale vision transformer
network, which learns a hierarchy of robust represen-
tations is employed by (Liang et al., 2022). They also
use a sliding-window classification strategy to facili-
tate temporal localization of actions-of-interest. An-
other approach proposed by (Li et al., 2023) contains
three modules: snippet-level action recognition based
on a lightweight X3D model, a training-free probabil-
ity calibration method that generates frame-level ac-
tion probability scores from snippet-level results and
temporal action localization.
3 PROPOSED METHOD
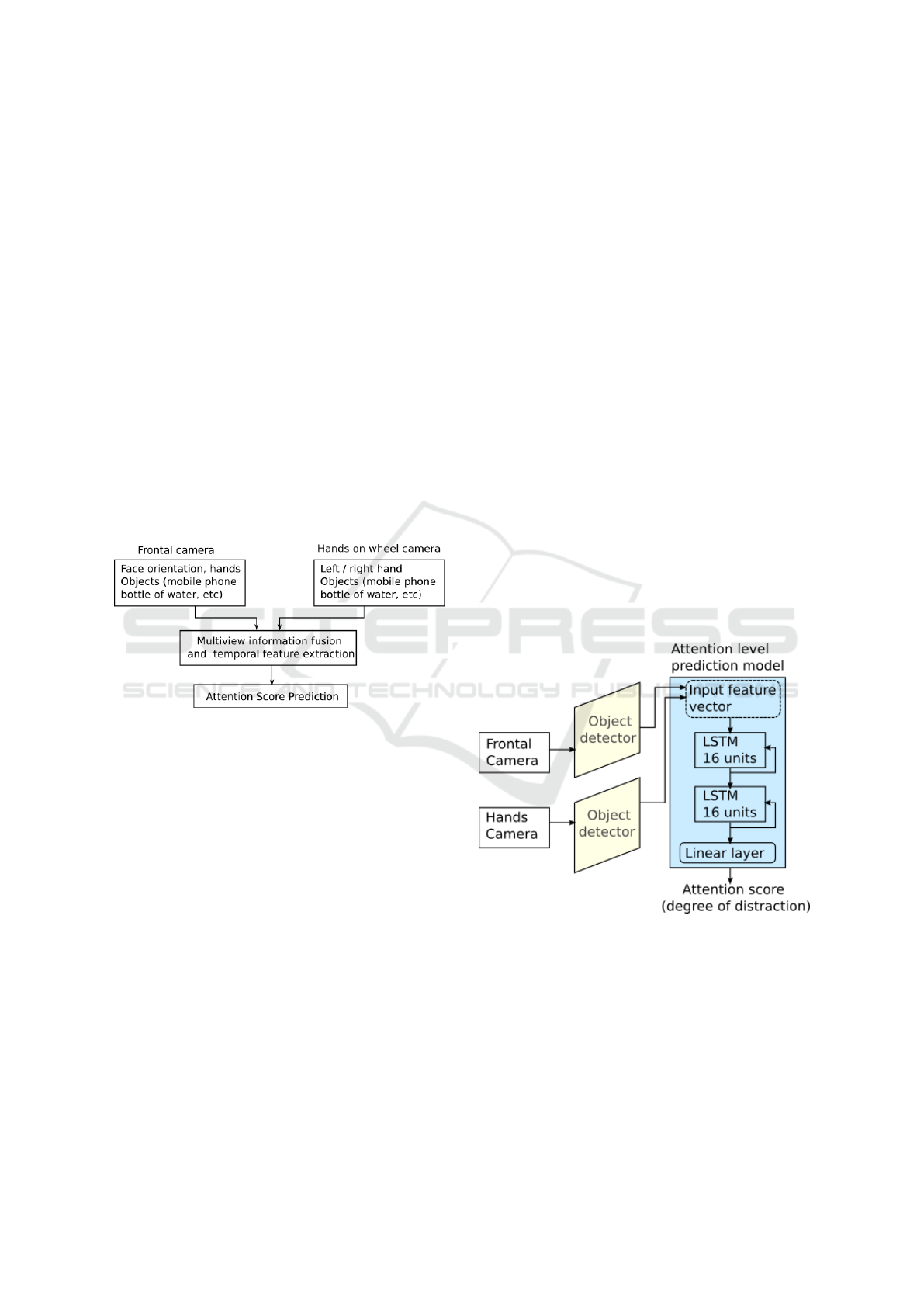
The proposed overall pipeline of the vision based
method for performing driver attention estimation is
shown in Figure 1.
Figure 1: Processing pipeline of the proposed driver atten-
tion estimation algorithm.
It has as main modules the frontal and hands on
wheel object detectors that provide the location of the
drivers’ face, hands and also the orientation of the
face: looking or not looking at the road, and the lo-
cation of distracting objects.
The detector is a YOLO based model (Wang et al.,
2022). It was trained for detecting the following
classes: 0: ”Hand not on wheel”; 1: ”Hand on bot-
tle”; 2: ”Hand on hair comb”; 3: ”Hand on wheel” ; 4:
”Hand on phone” when it processes the images from
the hands’ camera. On the other hand the detector ar-
chitecture was also trained on images provided by the
face camera and recognizes the following classes: 0:
”Looking at the road”; 1: ”Not looking at the road”;
2: ”Object” ; 3: ”Phone”.
The multi-view information fusion module real-
izes the temporal synchronization of the two data
cues: the frontal camera and the hands-on wheel
camera. The temporal synchronization of the multi-
view images is achieved by grouping all detected ac-
tions/objects of the two cameras based on the image
acquisition timestamp.
The temporal feature extraction module builds the
feature vector that is further used by the sequence
classification module. This vector contains the im-
age identifier, or more precisely, the associated frame
identifier, the camera from which the detected actions
originate, which can be ’hands’ or ’face’. It also con-
tains the category index, which is the unique identi-
fier of the detected class represented as an integer, the
coordinates for the detected bounding boxes, repre-
sented by a vector of 4 elements. Last but not least, it
includes the confidence score of the detected class re-
sulting from the YOLO model detection, represented
as a real number in range 0 and 1, which represents
the probability that the model’s output is correct.
The attention score prediction module uses a long
short term memory that estimates the drivers’ degree
of attention (which is inversely proportional to the
driver’s degree of distraction).
Three temporal models are trained for predicting
the attention level. The first model uses only the fea-
ture vector from the hands view camera. The second
model uses only the feature vector from the face view
camera. While the third model uses the combined
information from both cameras (hands and face) as
shown in Figure 2.
Figure 2: Diagram of the model used for predicting the at-
tention level based on the information from the two cam-
eras.
The architecture for each individual long short
term memory model consists of two recurrent layers
with 16 hidden units, followed by a linear layer with
one output used for predicting the attention score, as
depicted in Figure 2. The models have been trained
for 30 epochs, using a batch size equal to 256, a mean
squared error loss function and the Adam optimizer.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
580
4 EXPERIMENTS AND RESULTS
4.1 Dataset Description
For training and evaluating the proposed model we
have inferred annotations to a benchmark dataset,
DMD Driver Monitoring Dataset for Attention and
Alertness Analysis(Ortega et al., 2020). This dataset
contains recordings captured from various positions
inside a vehicle, among which two strategically posi-
tioned cameras capture the face and the hands of the
driver. Some activities were recorded with the car in
motion, with the car stopped, and in a simulator.
The original dataset contains approximately 150
videos for each of these cameras, and for the experi-
ments of this paper 50 of them were selected for an-
notation, each being different in terms of filming con-
ditions, driver, and objects present. Table 1 describes
how many images were annotated for each camera po-
sition, and the data was split to 70% for training, 15%
for validation, and 15% for testing.
Table 1: Number of annotated images for each class in the
hands and face dataset.
Hands Dataset
Class # Annotated images
Hand on wheel 2.427
Hand not on wheel 366
Hand on hair comb 136
Hand on bottle 128
Hand on phone 271
Face dataset
Looking at the road 3.838
Not looking at the road 822
Object 365
Phone 590
The driver’s attention level is annotated automat-
ically in the first phase. It is as a real number in the
range 0. . . 1, where 1 means the driver is extremely
attentive while 0 means the driver is very distracted.
The attention score is established automatically based
on the reasoning mechanisms in algorithms 1 and 2.
As the object detection score decreases, the value of
the attention score will increase or decrease by 0.1
depending on the type of action (distracting or not).
For modelling the variation of the score we use the p
variable in the algorithm.
Additionally, there may be situations where cer-
tain frames in a video do not contain annotations due
to occlusions that may occur in front of the camera.
These situations are addressed by setting the attention
level to 0.5 (as even the human user is uncertain about
the driver’s distraction level).
Data: Object detection score O
s
,
hands category id: hc
hc = 0 → One Hand On Wheel;
hc = 1 → Hand Not On Wheel;
hc = 2 → Hand On Bottle;
hc = 3 → Hands On Wheels;
hc = 4 → Hand On Phone;
hc = 5 → Hand On Hair Comb.
Result: Attention score: A
s
A
s
← −1 ;
if O
s
> 0.7 then p ← 0;
if O
s
∈ [0.3, 0.7] then p ← 0.1;
if O
s
< 0.3 then p ← 0.2;
if hc == 0 then A
s
= 0.8 − p;
if hc ∈ [1, 2, 5] then A
s
= 0.6 − p;
if hc == 3 then A
s
= 1 − p;
if hc == 4 then A
s
= 0.1 + p;
if hc == −1 then A
s
= 0.5;
Algorithm 1: Automatic annotation of attention score for
images captured by the camera facing the hands of the
driver.
Data: Object detection score O
s
,
face category id: f c
f c = 0 → Looking at the road;
f c = 1 → Not looking at the road;
f c = 2 → object is detected;
f c = 3 → phone is detected
Result: Attention score: A
s
A
s
← −1 ;
if O
s
> 0.7 then p ← 0;
if O
s
∈ [0.3, 0.7] then p ← 0.2;
if O
s
< 0.3 then p ← 0.2;
if f c == 0 then A
s
= 1.0 − p;
if f c == 1 then A
s
= 0.1 + p;
if f c == 2 then A
s
= 0.4 + p;
if f c == 3 then A
s
= 0.2 + p;
if f c == −1 then A
s
= 0.5;
Algorithm 2: Automatic annotation of attention score for
images generated by the camera capturing the face of the
driver.
The ground truth score for the combined model
(that uses information from both hands and face cam-
era) equals the average of the attention scores from
the hands and from the face annotations.
In the second phase of the annotation process the
attention scores are adjusted by the human annotators
that either increase or decrease the ground truth scores
depending on their own interpretation of situation.
Driver Attention Estimation Based on Temporal Sequence Classification of Distracting Contexts
581
4.2 Multimodal Object Detectors
A YOLO v7 network (Wang et al., 2022) was trained
for detecting the hands and face related actions and
objects. The evaluation metrics of the object detec-
tor are presented in Table 2. It can be noticed that a
high mean average precision is recorded for most of
the classes that capture the position of the hand with
respect to the wheel, while the class with the smallest
mean average precision is ’hand on hair comb’ be-
cause it appears in very few sequences and is very
similar in appearance with hand on bottle. Yet this
situation does not affect the attention score as both
actions (hand on comb or hand on bottle) denote a de-
crease in the driver’s attention level.
Table 2: The analysis of the YOLO model for the hands
and face dataset (Precision, Recall and Mean Average Pre-
cision).
Class Prec. Rec. mAP
All (hands) 0.91 0.70 0.86
Hand on wheel 0.98 0.99 0.98
Hand not on wheel 0.94 0.73 0.86
Hand on hair comb 0.76 0.7 0.64
Hand on bottle 0.84 0.95 0.88
Hand on phone 0.95 0.96 0.96
All (face) 0.95 0.92 0.96
Looking at the road 0.96 0.96 0.99
Not looking at the road 0.90 0.87 0.91
Object 0.95 0.89 0.94
Phone 1 0.98 0.96
4.3 Evaluation of the Driver Attention
Prediction Model
Predicting the degree of attention through the LSTM
model is done on sequences of lengths in [5, 10, 15,
20, 25, 30] frames. The attention level is predicted
for various offset frames. An offset=1 means the at-
tention level is predicted for the next frame, offset=2
means the model estimates what will be the attention
level in the second, and offset=5 means the model will
predict what will be the attention score after 5 frames.
The inference time for one frame takes an average of
35ms for the individual models for hands and face,
while the combined model has an average processing
time of 40ms per frame.
Table 3 presents the evaluation results for the three
proposed models. It can be noted that all three tempo-
ral prediction models have a mean squared error very
close to zero in the cases when they predict the atten-
tion score for the next frame. In Table 3 results for se-
quence lengths up to 20 consecutive frames have been
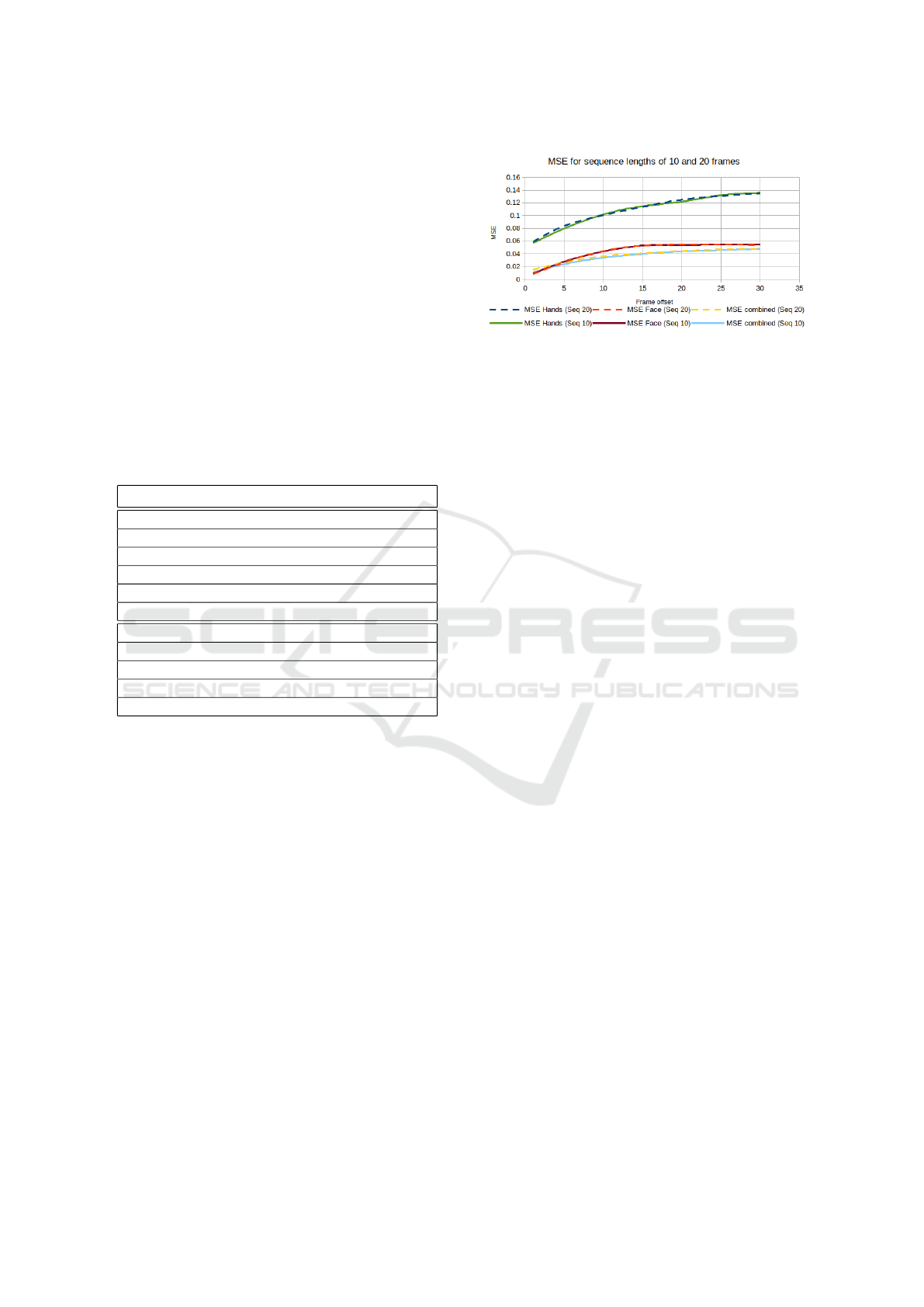
Figure 3: Mean square error evolution for sequence lengths
of 10 to 20 frames and various frame offsets.
included, but experiments were also conducted with
larger sequence lengths (up to 30 frames), for which
the results followed a similar pattern: good perfor-
mance for small frame offset. It can be noted that the
larger the sequence length the better the prediction is,
having smaller values for the mean squared error and
values close to 1 for R
2
score.
The results indicate that the LSTM models per-
formed well in predicting the attention score indi-
vidually, when using information only from hands or
from face camera object detectors and also when us-
ing the combined information from both hands and
face cameras. Three models were developed because
we wanted to analyse the behaviour of the proposed
system in cases when one source of information is
missing or may be damaged and in cases when all
sources of information are present. Other information
cues like outside road information can be integrated in
the model for increasing the precision of the results.
The evolution of the means squared error is de-
picted in Figure 3 for sequences of length 10 and 20
frames considering frame offsets in the range [1, 30].
As it can be noted from Table 3 and Figure 3 as the
frame offset increases the prediction errors increase
and the R
2
score decreases. So, best results are ob-
tained using a small frame offset of 1, 5 or even 10
frames and higher size of sequence lengths as the his-
tory of the temporal evolution of the information from
both hands and face camera is more relevant.
The proposed model was also compared with var-
ious regression models such as: Random Forest, Ad-
aboost, Support Vector Regressor. Due to the na-
ture of the input required by these regressors, the ex-
periments are done on feature vectors computed for
just on frame, no temporal aggregation was consid-
ered. Even if the results presented in Table 4 are very
comparable with the ones obtained by the proposed
model, the temporal model has the advantage of pro-
viding good results for larger sequence lengths and
frame offsets, being a good base for anticipating the
driver’s attention level in time.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
582
Table 3: Results of the LSTM model trained on hands, face and combined data: R
2
score, MAE: Mean Average Error, MSE:
Mean Squared Error.
(Frame offset R
2
MAE MSE R
2
MAE MSE R
2
MAE MSE
Sequence Length) hands hands hands face face face combined combined combined
1, 1 0.592 0.098 0.066 0.866 0.037 0.008 0.761 0.055 0.015
5, 1 0.386 0.130 0.100 0.545 0.086 0.028 0.571 0.086 0.027
10 , 1 0.345 0.149 0.107 0.263 0.125 0.046 0.417 0.110 0.037
15, 1 0.266 0.164 0.119 0.151 0.143 0.053 0.330 0.122 0.042
20, 1 0.216 0.174 0.128 0.128 0.149 0.054 0.291 0.129 0.045
25, 1 0.179 0.182 0.134 0.122 0.151 0.054 0.260 0.133 0.047
30, 1 0.145 0.188 0.139 0.116 0.152 0.055 0.232 0.136 0.049
1, 5 0.628 0.097 0.061 0.857 0.039 0.009 0.818 0.050 0.012
5, 5 0.523 0.123 0.078 0.539 0.087 0.029 0.616 0.084 0.024
10, 5 0.379 0.146 0.101 0.260 0.125 0.046 0.439 0.109 0.036
15, 5 0.280 0.161 0.117 0.153 0.144 0.053 0.361 0.121 0.040
20, 5 0.223 0.172 0.126 0.126 0.150 0.054 0.309 0.129 0.044
25, 5 0.191 0.180 0.132 0.116 0.152 0.055 0.266 0.133 0.047
30, 5 0.166 0.187 0.136 0.115 0.153 0.055 0.237 0.137 0.048
1, 10 0.649 0.095 0.057 0.861 0.038 0.009 0.825 0.049 0.011
5, 10 0.509 0.124 0.080 0.552 0.083 0.028 0.628 0.083 0.024
10, 10 0.370 0.146 0.102 0.287 0.122 0.044 0.461 0.108 0.034
15, 10 0.293 0.161 0.115 0.153 0.144 0.053 0.366 0.122 0.040
20, 10 0.248 0.172 0.122 0.128 0.149 0.054 0.311 0.129 0.044
25, 10 0.188 0.179 0.132 0.112 0.152 0.055 0.270 0.133 0.046
30, 10 0.167 0.187 0.136 0.115 0.153 0.055 0.239 0.137 0.048
1, 20 0.64 0.095 0.059 0.871 0.036 0.008 0.760 0.057 0.015
5, 20 0.487 0.126 0.084 0.564 0.083 0.027 0.579 0.087 0.027
10, 20 0.381 0.146 0.101 0.284 0.124 0.044 0.425 0.111 0.036
15, 20 0.299 0.161 0.114 0.149 0.144 0.053 0.324 0.122 0.041
20, 20 0.23 0.171 0.125 0.120 0.150 0.055 0.293 0.130 0.045
25, 20 0.198 0.18 0.131 0.118 0.151 0.055 0.271 0.134 0.047
30, 20 0.173 0.187 0.135 0.131 0.150 0.054 0.238 0.136 0.048
Table 4: Comparison of various algorithms used for the prediction of the attention score, considering no temporal aggregation.
The attention score is predicted is done only on the current frame.
Model R
2
MAE MSE R
2
MAE MSE R
2
MAE MSE
hands hands hands face face face combined combined combined
LSTM (proposed) 0.592 0.098 0.066 0.866 0.037 0.008 0.761 0.055 0.015
Random Forest 0.48 0.1 0.08 0.66 0.05 0.01 0.68 0.08 0.02
AdaBoost 0.65 0.09 0.062 0.88 0.047 0.008 0.8 0.1 0.01
SVR 0.92 0.068 0.002 0.96 0.017 0.002 0.97 0.03 0.001
4.4 Demonstrative Results
Figures 4, 5, 6 show driver attention estimation results
with the context objects marked on images. Each im-
age depicts the bounding boxes along with the name
and confidence score of the detected object. The pre-
dicted attention score is displayed in red in the upper
left corner of the images. Figure 4 shows a situation
of low distraction. One can notice a good attentive-
ness with the driver being focused on the road and
having both hands on the steering wheel.
Figure 5 depicts a situation of medium level dis-
traction while driving. In this case, the camera per-
ceiving the face captured another object that signif-
icantly reduced the driver’s attentiveness, increasing
his level of distraction. In Figure 5-bottom there is
a situation of uncertainty because one hand is ob-
structed by the driver’s body, and the other is on the
object detected in the face image.
Driver Attention Estimation Based on Temporal Sequence Classification of Distracting Contexts
583

Figure 4: Results: low distraction, high level of attention.
Figure 5: Results: medium distraction, medium level of at-
tention.
A high distraction situation is displayed in Figure
6. The driver is not paying attention to the road and he
is looking at the phone from his hand. The predicted
attention score is very low.
5 CONCLUSIONS
The paper presents a framework for assessing the
driver’s distraction level while driving by determining
the distracting actions and the objects present in the
Figure 6: Results: high distraction, low level of attention.
indoor environment of the car. The driver’s distraction
level refers to how much attention does the driver pay
to the driving process. A temporal regression model
is trained using various features extracted on top of
object detection performed on images coming from
two monocular color cameras: one camera is record-
ing the driver’s face, and the another one captures the
driver’s hands and the steering wheel. The degree of
attention was annotated on a benchmark dataset and
the temporal sequence model was trained for predict-
ing the attention level based on the evolution of in-
formation captured from face and hands monitoring
cameras.
ACKNOWLEDGEMENTS
This work was supported by a grant from the Ministry
of Research and Innovation, CNCS—UEFISCDI,
project number PN-III-P4-ID-PCE2020-1700.
REFERENCES
Alyahya, M., Alghannam, S., and Alhussan, T. (2022).
Temporal driver action localization using action clas-
sification methods. In 2022 IEEE/CVF Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 3318–3325.
Borghi, G. (2018). Combining deep and depth: Deep learn-
ing and face depth maps for driver attention monitor-
ing. ArXiv, abs/1812.05831.
Borghi, G., Venturelli, M., Vezzani, R., and Cucchiara, R.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
584

(2017). Poseidon: Face-from-depth for driver pose
estimation. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Hu, Z., Zhang, Y., Xing, Y., Li, Q., and Lv, C. (2022). An
integrated framework for multi-state driver monitor-
ing using heterogeneous loss and attention-based fea-
ture decoupling. Sensors, 22(19).
Jha, S. K., Marzban, M. F., Hu, T., Mahmoud, M. H., and
Busso, N. A.-D. C. (2020). The multimodal driver
monitoring database: A naturalistic corpus to study
driver attention. IEEE Transactions on Intelligent
Transportation Systems, 23:10736–10752.
Li, R., Wu, C., Li, L., Shen, Z., Xu, T., Wu, X.-J., Li, X.,
Lu, J., and Kittler, J. (2023). Action probability cal-
ibration for efficient naturalistic driving action local-
ization. In 2023 IEEE/CVF Conference on Computer
Vision and Pattern Recognition Workshops (CVPRW),
pages 5270–5277.
Liang, J., Zhu, H., Zhang, E., and Zhang, J. (2022).
Stargazer: A transformer-based driver action detec-
tion system for intelligent transportation. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 3160–3167.
Muhrer, E. and Vollrath, M. (2011). The effect of visual and
cognitive distraction on driver’s anticipation in a simu-
lated car following scenario. Transportation Research
Part F: Traffic Psychology and Behaviour, 14(6):555–
566. Special Issue: Driving Simulation in Traffic Psy-
chology.
Naphade, M., Wang, S., Anastasiu, D. C., Tang, Z., Chang,
M., Yao, Y., Zheng, L., Rahman, M. S., Venkat-
achalapathy, A., Sharma, A., Feng, Q., Ablavsky, V.,
Sclaroff, S., Chakraborty, P., Li, A., Li, S., and Chel-
lappa, R. (2022). The 6th ai city challenge. In 2022
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 3346–
3355. IEEE Computer Society.
Naphade, M., Wang, S., Anastasiu, D. C., Tang, Z., Chang,
M.-C., Yao, Y., Zheng, L., Rahman, M. S., Arya,
M. S., Sharma, A., Feng, Q., Ablavsky, V., Sclaroff,
S., Chakraborty, P., Prajapati, S., Li, A., Li, S., Ku-
nadharaju, K., Jiang, S., and Chellappa, R. (2023).
The 7th ai city challenge. In The IEEE Conference
on Computer Vision and Pattern Recognition (CVPR)
Workshops.
Ortega, J. D., Kose, N., Ca
˜
nas, P., Chao, M.-A., Unnervik,
A., Nieto, M., Otaegui, O., and Salgado, L. (2020).
Dmd: A large-scale multi-modal driver monitoring
dataset for attention and alertness analysis. In Bar-
toli, A. and Fusiello, A., editors, Computer Vision –
ECCV 2020 Workshops, pages 387–405. Springer In-
ternational Publishing.
Rong, Y., Kassautzki, N.-R., Fuhl, W., and Kasneci, E.
(2022). Where and what: Driver attention-based ob-
ject detection. Proc. ACM Hum.-Comput. Interact.,
6(ETRA).
Vats, A. and Anastasiu, D. C. (2022). Key point-based
driver activity recognition. In 2022 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
Workshops (CVPRW), pages 3273–3280.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2022).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors.
Wang, Y., Zhao, T., Ding, X., Bian, J., and Fu, X. (2017).
Head pose-free eye gaze prediction for driver attention
study. In 2017 IEEE International Conference on Big
Data and Smart Computing (BigComp), pages 42–46.
Zhou, W., Qian, Y., Jie, Z., and Ma, L. (2023). Multi view
action recognition for distracted driver behavior local-
ization. In 2023 IEEE/CVF Conference on Computer
Vision and Pattern Recognition Workshops (CVPRW),
pages 5375–5380.
Driver Attention Estimation Based on Temporal Sequence Classification of Distracting Contexts
585
