
TEAM: A Parameter-Free Algorithm to Teach Collaborative Robots
Motions from User Demonstrations
Lorenzo Panchetti
1 a
, Jianhao Zheng
1 b
, Mohamed Bouri
1 c
and Malcolm Mielle
2 d
1
´
Ecole Polytechnique F
´
ed
´
erale de Lausanne (EPFL), Lausanne, Switzerland
2
Schindler AG, EPFL Lab, Lausanne, Switzerland
fl
Keywords:
Learning from Demonstration, Cobots, Probabilistic Movement Primitives, Industrial Applications.
Abstract:
Learning from demonstrations (LfD) enables humans to easily teach collaborative robots (cobots) new motions
that can be generalized to new task configurations without retraining. However, state-of-the-art LfD methods
require manually tuning intrinsic parameters and have rarely been used in industrial contexts without experts.
We propose a parameter-free LfD method based on probabilistic movement primitives, where parameters are
determined using Jensen-Shannon divergence and Bayesian optimization, and users do not have to perform
manual parameter tuning. The cobot’s precision in reproducing learned motions, and its ease of teaching and
use by non-expert users are evaluated in two field tests. In the first field test, the cobot works on elevator door
maintenance. In the second test, three factory workers teach the cobot tasks useful for their daily workflow.
Errors between the cobot and target joint angles are insignificant—at worst
0.28
deg—and the motion is
accurately reproduced—GMCC score of 1. Questionnaires completed by the workers highlighted the method’s
ease of use and the accuracy of the reproduced motion. Public implementation of our method and datasets are
made available online.
1 INTRODUCTION
Collaborative robots (cobots) are built to improve so-
ciety by helping people without replacing them. To
become an integrated part of our work, human work-
ers must be able to teach cobots new tasks in a short
time, making the robot a new tool in their toolbox.
However, programming the cobot is most of the time
done by experts and cobots cannot adapt to new task
configurations, instead repeating learned patterns.
Learning from demonstration (LfD) (Rana et al.,
2020)—a branch of learning focused on skill transfer
and generalization through a set of demonstrations—
enables cobots to learn and adapt motions from a set
of demonstrations. State-of-the-art LfD methods re-
quire either manually tuning intrinsic parameters or a
large amount of data, and have thus rarely been used
in industrial contexts without experts, since manual
tuning and data collection are time-consuming and
error-prone. In this paper, we present TEAM (
te
ach
a robot
a
rm to
m
ove), a novel method to learn from
a
https://orcid.org/0009-0004-9657-7249
b
https://orcid.org/0000-0003-4430-3049
c
https://orcid.org/0000-0003-1083-3180
d
https://orcid.org/0000-0002-3079-0512
demonstrations without manual tuning of intrinsic pa-
rameters during training.
The main contributions of this paper are:
•
A parameter-free framework to learn motions from
a set of demonstrations, using a generative model
to find a generalized trajectory, and attractor land-
scapes to reproduce the motion between different
start and target joint angles.
•
An optimization strategy of the attractor land-
scape’s intrinsic parameters through Bayesian op-
timization.
•
Improvement on the selection of the number of
Gaussian Mixture Models through a series of one-
tailed Welch’s t-tests, based on the Jensen-Shannon
divergence.
•
Experimental validation of TEAM in two field tests
showing that our method can be used by non-expert
robot users.
A complete overview of the methodology is shown
in Figure 1.
570
Panchetti, L., Zheng, J., Bouri, M. and Mielle, M.
TEAM: A Parameter-Free Algorithm to Teach Collaborative Robots Motions from User Demonstrations.
DOI: 10.5220/0012159700003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 570-577
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
Dynamic Time
Warping
Demonstrations:
Gaussian mixture
model (GMM) and
regression (GMR)
Number of components
K found using JS
divergence approach
Damped Spring Models
Model parameters α
z
and N found through
Bayesian optimization
Attractor landscape TrajectoryStart and target joint angles
Aligned demonstrations
GMR
Model parameters
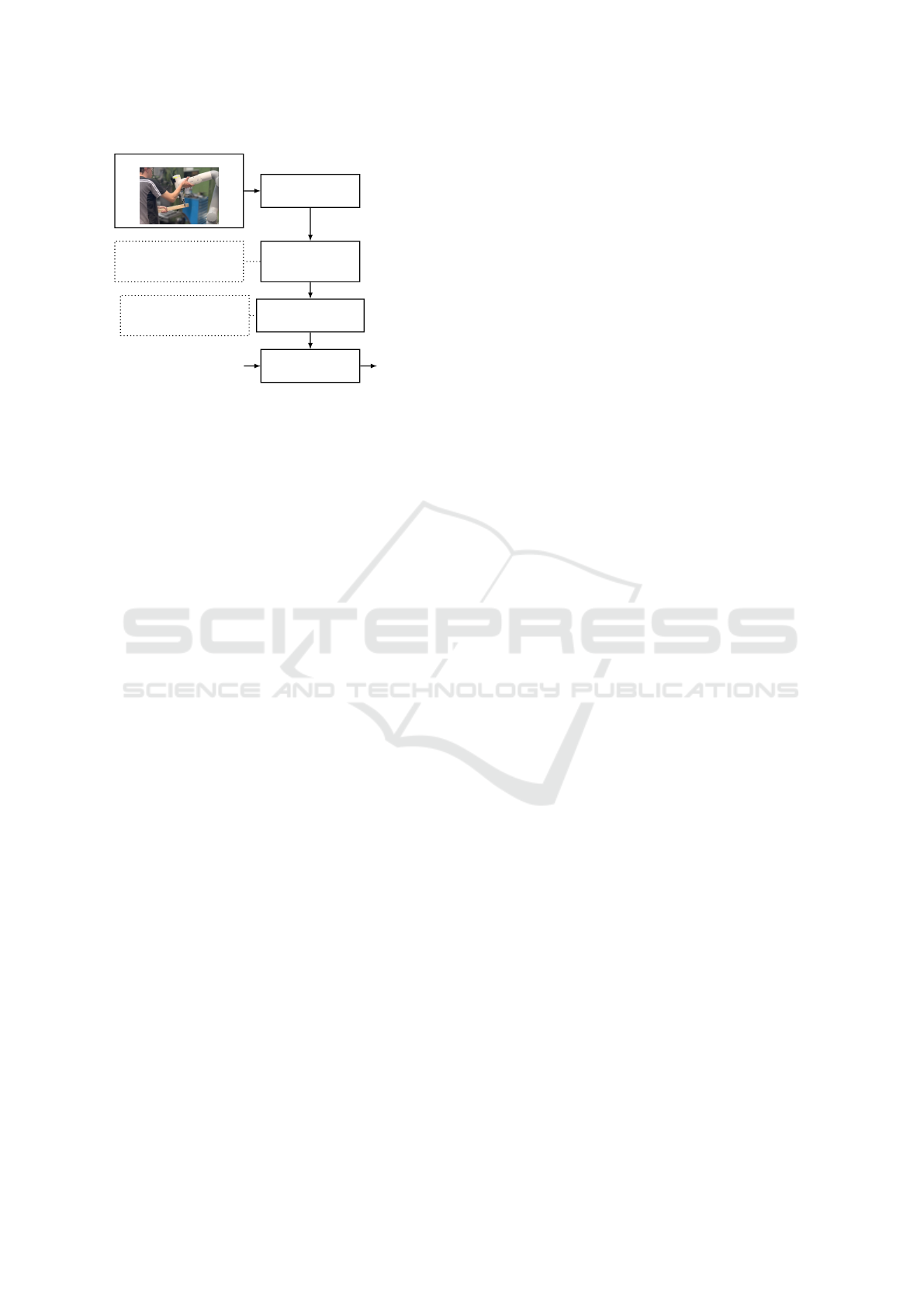
Figure 1: A set of demonstrations is recorded by a user
and the motion is generalized through GMR. The system is
modelled as a set of damped spring models that generalize
the motion. Given start and target joint angles, model’s
parameters are used to generate new trajectories reproducing
the motion taught by demonstrations. All system parameters
are automatically optimized, and no expert knowledge is
needed.
2 RELATED WORK
Rana et al. (2020) present a large-scale study bench-
marking the performance of motion-based LfD ap-
proaches and show that Probabilistic Movement Primi-
tives (ProMP) (Paraschos et al., 2013) methods are the
most consistent on tasks with positional constraints.
ProMP is a general probabilistic framework for learn-
ing movement primitives that allows new operations,
including conditioning and adaptation to changed task
variables.
Calinon et al. (2007) fit a mixture of Gaussians
on a set of demonstrations and generalize the motion
through Gaussian Mixture Regression (GMR) (Cohn
et al., 1996). Trajectories are computed by optimiz-
ing an imitation performance metric. However, joint
configurations are not constrained to the demonstra-
tion space, which can lead to the exploration of unsafe
areas.
Kulak et al. (2021) propose to use Bayesian
Gaussian mixture models to learn ProMP. While their
method reduces the number of demonstrations needed
to learn a representation with generalization capabili-
ties, the method parameters must be manually set for
all experiments.
Ijspeert et al. (2013) and Schaal (2006) use Dynam-
ical Movement Primitives (DMP) to model complex
motions through nonlinear dynamical systems. DMP
is scale and temporal invariant, convergence is proven,
but the parameters of the system must be manually
tuned.
Pervez et al. (2018) propose a method that general-
izes motion outside the demonstrated task space. Each
demonstration is associated with a dynamical system,
and learning is formulated as a density estimation prob-
lem. However, parameters must be set empirically for
all dynamical systems.
Recent works have leveraged advances in deep
learning. To tackle the challenging problem of model
collapse, (Zhou et al., 2020) propose using a mixture
density network (MDN) that takes task parameters as
input and provides a Gaussian mixture model (GMM)
of the MP parameters. During training, their work
introduces an entropy cost to achieve a more balanced
association of demonstrations to GMM components.
Pahi
˘
cet al. (2020) propose to train a neural net-
work to output the parameters of the DMP model from
an image, before learning the associated forcing term.
Pervez et al. (2017) use deep neural networks to learn
the forcing terms of the DMP model for vision-based
robot control. Both methods involve a convolutional
neural network learning task-specific features from
camera images. Sanni et al. (2022) estimate the corre-
lation between visual information and ProMP weights
for reach-to-palpate motion. The average error in task
space is around 3 to 5 centimeters which is too high for
our application. Yang et al. (2022) use reinforcement
learning to learn a latent action space representing
the skill embedding from demonstrated trajectories
for each prior task. Tosatto et al. (2020) provide a
complete framework for sample-efficient off-policy
RL optimization of MP for robot learning of high-
dimensional manipulation skills. All methods based on
deep or reinforcement learning require a large amount
of data. E.g., Sanni et al. (2022) show the robot the
reach-to-palpate motion 500 times, Pervez et al. (2017)
acquire 50 demonstrations for a single task, and Yang
et al. (2022) uses around 80K trajectories.
3 METHOD
3.1 Overview
To learn a motion, a set of demonstrations is first col-
lected by the user. In our work, the cobot is taught by
manual guidance—see the image in the demonstration
box of Figure 1. A demonstration stores the cobot’s
joint angles recorded while the cobot is shown the
task and the robot is controlled in joint space to avoid
singularities during the motion of the redundant robot
arm. As in previous work by Calinon et al. (2007),
demonstrations are aligned in time using dynamic time
warping (Sakoe and Chiba, 1978).
The first step of our method consists in finding the
best Gaussian mixture model (GMM) fit on the demon-
TEAM: A Parameter-Free Algorithm to Teach Collaborative Robots Motions from User Demonstrations
571

strations dataset and calculates the Gaussian Mixture
Regression (GMR)—i.e. the generalized trajectory.
Section 3.2 shows how to use the Jensen-Shannon
(JS) divergence (Lin, 1991) to fit the GMM and GMR
without user input. From the GMR, the motion is rep-
resented as a set of damped spring models; Section 3.4
shows how to estimate the optimal parameters of the
models through Bayes optimization. Finally, the op-
timal motion is computed by the attractor landscape,
given initial and goal cobot joint angles.
3.2 Gaussian Mixture Model and
Gaussian Mixture Regression
Given a set of demonstrations, a GMM is fitted on
each degree of freedom—each of the cobot’s joints.
Maximum likelihood estimation of the mixture param-
eters is done using Expectation Maximization (EM)
(Dempster et al., 1977).
The number of mixture model components
k
is
critical to obtaining a GMM leading to a smooth GMR.
While Calinon et al. (2007) used the BIC criterion
to determine the optimal value
k
—denoted
k
∗
in our
work—Pervez et al. (2017) showed that BIC overfits
the dataset without a manually tuned regularization
factor. We propose a novel strategy to find
k
∗
without
any manual thresholds, based on cross validation, the
JS divergence, and statistical analysis.
For
k = 2
until
k = c
—with
c
the maximum num-
ber of components in the GMM—50 cross validations
are performed over the demonstration dataset using the
JS divergence as a measure of similarity between the
GMMs generated from the train and test splits. The
mean
m
k
and standard deviation
s
k
of the JS diver-
gences for each
k
are stored in the set
s(k) → (m
k
, s
k
)
.
k
∗
is initialized as the value in
s
with the minimum
m
k
. For each key
k ∈ s
, a serie of one-tailed Welch’s
t-tests (Welch, 1947) with
α = 0.05
—i.e. there is a 5%
chance that the results occurred at random—is used
to evaluate whether
k
is a more optimal number of
components than the current value of
k
∗
. First, we test
if the JS divergence of
k
is strictly greater than that of
k
∗
. The null hypothesis H1 and alternative hypothesis
H2 are:
Hypothesis 1 (H1): k − k
∗
≤ 0
Hypothesis 2 (H2): k
∗
− k < 0
If the null hypothesis is rejected,
k
is strictly greater
than
k
∗
and
k
is not the optimal number of components.
If we fail to reject the null hypothesis, we then test if
k
is strictly less than
k
∗
. The null hypothesis H3 and
alternative hypothesis H4 are:
Data: demonstrations set D
Result: k
∗
1 s ← empty map;
2 for k = 2 until k = c do
3 res ← empty list;
4 for 1 to 50 do
5 Sample datapoints of D in two equal
sets D
1
and D
2
;
6 G
1
← GMM with k components fitted
on D
1
;
7 G
2
← GMM with k components fitted
on D
2
;
8 Add JSdivergence(G
1
, G
2
) to res;
9 end
10 m
k
, s
k
← mean(res), std(res);
11 s(k) ← (m
k
, s
k
);
12 end
13 k
∗
← component in s with the lowest mean;
14 for key k, value (m
k
, s
k
) ∈ s do
15 if H1 is not rejected then
16 if H3 is rejected or s
k
< s
k
∗
then
17 k
∗
← k;
18 end
19 end
20 end
21 return k
∗
Algorithm 1: Algorithm used to determine the best number
of components for the GMM.
Hypothesis 3 (H3): k
∗
− k ≤ 0
Hypothesis 4 (H4): k − k
∗
< 0
If the null hypothesis is rejected,
k
∗
is strictly greater
than
k
, and
k
is the optimal number of components. If
we failed to reject both H1 and H3, no conclusions as
to whether
k
or
k
∗
is the best estimate can be drawn,
and
k
∗
is set to the most stable number of components:
k
∗
= k if and only if s
k
is lower than s
k
∗
.
The process to determine the optimal number of
Gaussians is detailed in Algorithm 1.
3.3 Damped Spring Model
TEAM uses the damped spring model formulated by
Ijspeert et al. (2013): :
τ˙z = α
z
(β
z
(g − y) −z) + f
˙y = z
(1)
where
τ
is a time constant,
f
is the nonlinear forcing
term,
α
z
and
β
z
are positive constants, and
g
is the
target joint angles. The forcing term
f
of Equation (1)
is used to produce a specific trajectory—i.e. the GMR.
Since
f
is a nonlinear function, it can be represented
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
572
as a normalized linear combination of basis functions
(Bishop, 2006):
f (x) =
∑
N
i=1
Ψ
i
(x)ω
i
∑
N
i=1
Ψ
i
(x)
(g − y
0
)v (2)
where
Ψ
i
are fixed radial basis functions,
ω
i
are the
weights learned during the fit,
g
is the goal joint an-
gles, and
v
is the system velocity.
N
is the number
of fixed radial basis function kernels
Ψ
i
(x)
. Detailed
derivations, and methods to compute
ω
i
and the joint
dynamics, are found in Ijspeert et al. (2013).
3.4 Parameters Optimization
For
y
to monotonically converge towards the target
g
, the system must be critically damped on the GMR
by choosing the appropriate values of
α
z
and
β
z
. As
shown by Ijspeert et al. (2013),
β
z
can be expressed
with respect to
α
z
as
4β
z
= α
z
. Thus, only two pa-
rameters control the tracking of the reference and the
stability: the number of radial basis functions
N
and
the constant
α
z
. In the previous state-of-the-art (e.g.
Ijspeert et al. (2013) and Pervez et al. (2018)),
α
z
and
N
are empirically chosen by the user. Instead, TEAM
uses Bayesian optimization (BO) (Garnett, 2022) to
determine α
z
and N and avoid manual tuning.
The error to minimize is the sum of both the root
mean squared error with respect to the GMR and the
distance of the trajectory endpoint with respect to the
goal reference:
f (α
z
, N) =
s
∑
T
t=1
(y(α
z
, N, t) − y
G
(t))
2
T
+ ||y(α
z
, N, T ) − y
G
(T )||
(3)
where
y(α
z
, N, t)
is the joint angles at time
t
obtained
with DMP parameters
α
z
and
N
,
y
G
(t)
is the GMR
joint angles at time
t
, and
|| · ||
is the
l
2
-norm. The
acquisition function is the expected improvement (EI):
EI
i
(x) := E
i
[ f (x) − f
∗
i
] (4)
where
E
i
[·|x
1:i
]
indicates the expectation taken under
the posterior distribution given evaluations of
f (x)
at
x = x
1
, ...,x
i
. The acquisition function retrieves the
point in the search space that corresponds to the largest
expected improvement and uses it for the next eval-
uation of the objective function
f (x)
. The point
x
i
minimizing the value of
f (x)
corresponds to the op-
timal combination of
α
z
and
N
. The optimization is
stopped when two successive query points are equal.
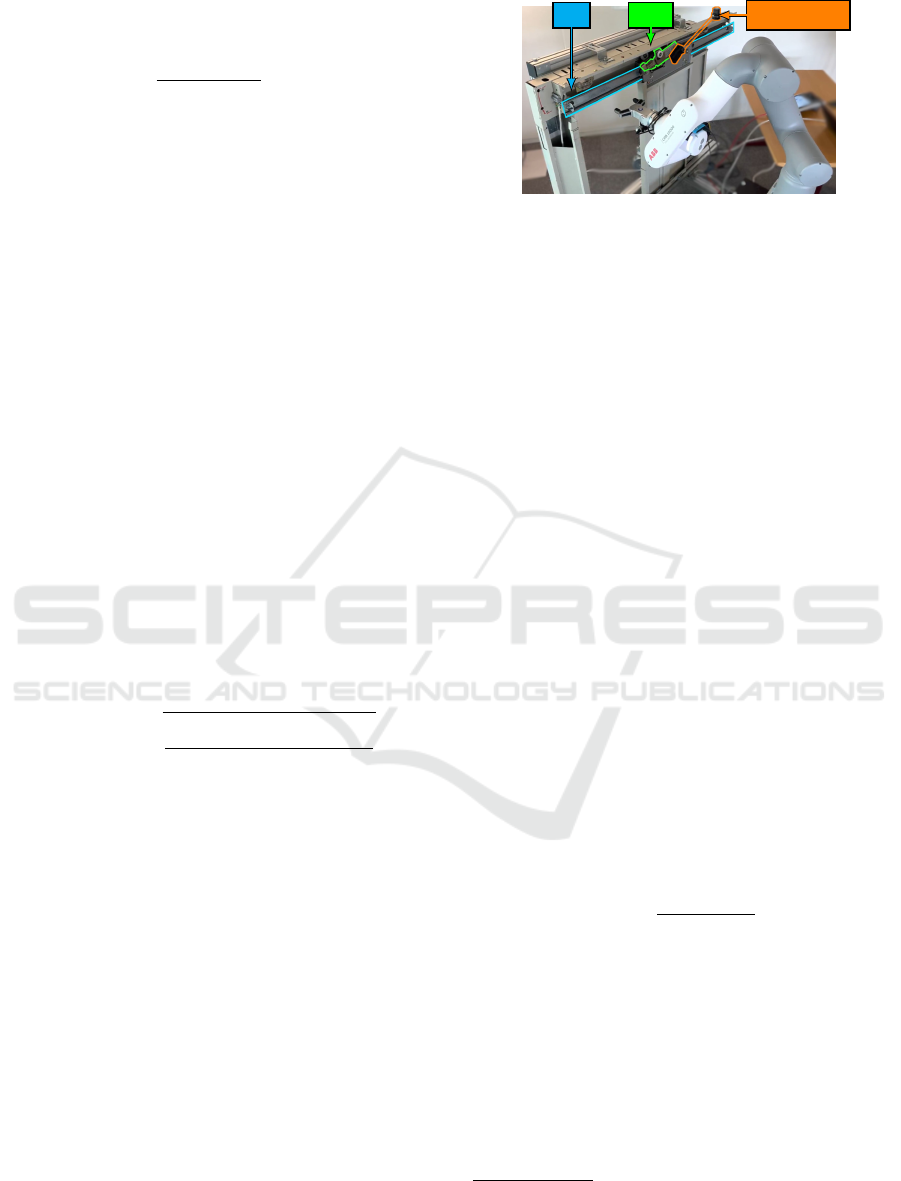
rail
opening tool
lock
Figure 2: The cobot faces the test elevator door used for
evaluation of TEAM in a maintenance scenario.
4 EVALUATION
We evaluate our method in two real-world scenarios,
using a 6-axis ABB GoFa CRB 15000 cobot
1
—pose
repeatability at the maximum reach and load is 0.05
mm. In the first scenario, the cobot works alone to
do maintenance operations on an elevator door. This
scenario is used to evaluate the stability of the method—
both the parameter selection and its robustness to start
and goal angle changes. The second scenario pertains
to the ease of use of our method for non-expert users:
three Schindler workers teach the cobot a set of tasks
needed to drill elevator pieces on Schindler’s factory
line.
The desired workflow for field technicians is one
where, for a given task, the cobot first learns the motion
and then reproduces the motion on the factory line
without having to be trained again. Hence, for each
task, a set of demonstrations is recorded by a user and
the cobot learns the motion using TEAM. Then, using
the previously trained model, the cobot reproduces the
task multiple times with different start joint angles.
To measure the cobot’s accuracy in reaching the
target joint angles, we measure the mean absolute er-
ror
e
j
between the goal joint
g
and actual end joint
t
angles:
e
j
=
∑
n
i=1
|t
i
− g
i
|
n
(5)
with
n
the number of joints. To measure the quality
of the reproduced motion, we use the Generalized
Multiple Correlation Coefficient (GMCC) proposed by
Urain et al. (2019), a measure of similarities between
trajectories that is invariant to linear transformations.
Code, datasets, and metrics can be found online.
2
4.1 Door Maintenance Dataset
The 5 tasks of elevator door maintenance dataset:
1
https://new.abb.com/products/robotics/
collaborative-robots/crb-15000
2
https://github.com/SchindlerReGIS/team
TEAM: A Parameter-Free Algorithm to Teach Collaborative Robots Motions from User Demonstrations
573
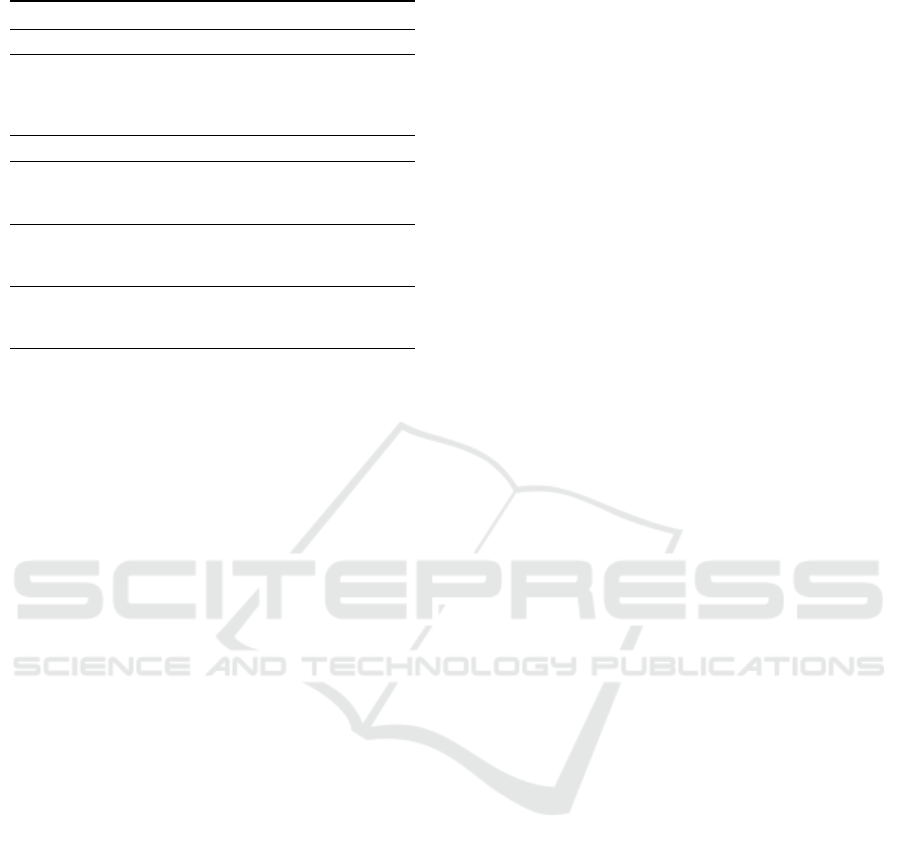
Table 1: JS divergence repeatability over 50 runs.
Task T1 T2 T3 T4 T5
Median nb GMM
5 ±0.40 3 ±0 4 ±0 3 ± 0 4 ±0.27
Table 2: Comparison between grid search (GS) and Bayesian
optimization (BO). Statistics over 50 runs.
Task T1 T2 T3 T4 T5
GS minimum
12.84 73.91 30.88 36.58 26.44
BO minimum
12.84
±0
74.22
±0.61
30.98
±0.40
36.68
±0.27
26.44
±0.05
GS time [s]
2348.97 2600.96 2427.34 2149.50 1848.20
BO median
time [s]
19.39
±3.63
27.40
±10.17
12.40
±2.40
26.11
±18.54
12.53
±1.99
GS calls
3750 3750 3750 3750 3750
BO calls
23.14
±3.88
34.20
±10.85
16.96
±2.73
32.98
±18.97
20.14
±2.58
• T 1
: open and lock the door using a custom opening
tool. The lock is now in the middle of the rail.
• T 2: grab the cleaning tool.
• T 3
: clean the rail while avoiding the lock. The
cobot must aim for both ends of the rail with the
brush since most dust accumulates there.
• T 4: drop the cleaning tool on its support.
• T 5
: grab the opening tool, close the door, and
combine the two pieces of the opening tool.
The maintenance setup can be seen in Figure 2.
4.1.1 Evaluation of the Parameters’
Repeatability
A repeatability analysis of the parameters
K
,
α
z
, and
N
,
is done on the data collected for the door maintenance
scenario.
Repeatability of
K
Using the JS Divergence: the
method described in Section 3.2 is run 50 times for
each task in the maintenance dataset—with a minimum
of 2 Gaussians and a maximum of 9. As seen in Ta-
ble 1, the median number of Gaussians for each dataset
varies only by a small standard deviation, showing that
the selection of the number of Gaussian components
is stable.
Damped Spring Model Parameters: we compare BO
with grid search (GS) for 50 runs per task in the main-
tenance dataset. One can see in Table 2 that BO con-
verges 100 times faster than GS and to the same global
optimum. Optimization took an average of 19.57s on
an Intel Core i5 10
th
Gen and there is a reduction by
a factor of at least 100 in the number of iterations
needed—it should be noted that larger standard devi-
ations in the running time are usually due to larger
outliers with a median time around 20s.
In conclusion, we find that the JS divergence and
BO lead to a stable selection of
K
,
α
z
, and
N
, and can
be used as sensible replacements for the manual tuning
previously done by expert users.
4.1.2 Adaptability
Table 3 shows the number of demonstrations recorded
for each task, with the average training times and error
metrics.
The complexity of DTW is
O((M − 1)L
2
)
, with
M
the number of demonstrations in the dataset and
L
the longest demonstration length, GMM and GMR are
O(KBD
3
)
where
B
is the number of datapoints in the
dataset,
D
the data dimensionality, and
K
the number
of GMM components. The Gaussian Process of the
BO is
O(R
3
)
with
R
being the number of function
evaluations—Table 2 shows that
R
is at worse around
34.20 ± 10.85
. As seen in Table 3, in the maintenance
scenario, the maximum training time is under 4min—
the longest training time is 203.33 ± 4.32s for T 2.
Once a model is trained, the accuracy of the re-
produced trajectory is evaluated by computing 30 re-
productions and calculating the GMCC between the
reproduced trajectory and the GMR. For each repro-
duction, the target joint angles are the same as the last
joint angles of the GMR, and the start joint angles are
the same as the GMR, with the addition of a zero mean
Gaussian noise with standard deviation of
1
,
5
,
10
, and
20
degrees. For each noise value, the average GMCC
and
e
j
per task are shown in Table 3. One can see that,
regardless of the noise value, GMCCs and
e
j
are very
close to
1
and
0
respectively, showing that the cobot
accurately reproduces the demonstrated motion and
reaches the target joint angles. E.g., Figure 3 shows
the regression trajectory and reproduction per joint
with Gaussian noise with standard deviation of 20 deg:
the trajectory of each joint is conserved regardless of
the noise added to the start joint angles.
4.2 Field Tests and User Study
To validate that the cobot can be used by non-expert
users in a professional setting, we conducted field tests
at the Schindler headquarters with three Schindler field
workers working on the production line. None of the
workers had worked with a cobot before. To ensure
realism of the tasks, the field workers designed four
test scenarios that would reduce their workload if the
robot can easily be taught how to perform the task:
• F1
: find a metal piece, grab and place it on a
drilling machine.
• F2
: find a metal piece, grab and place it on a
drilling machine while avoiding an obstacle.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
574
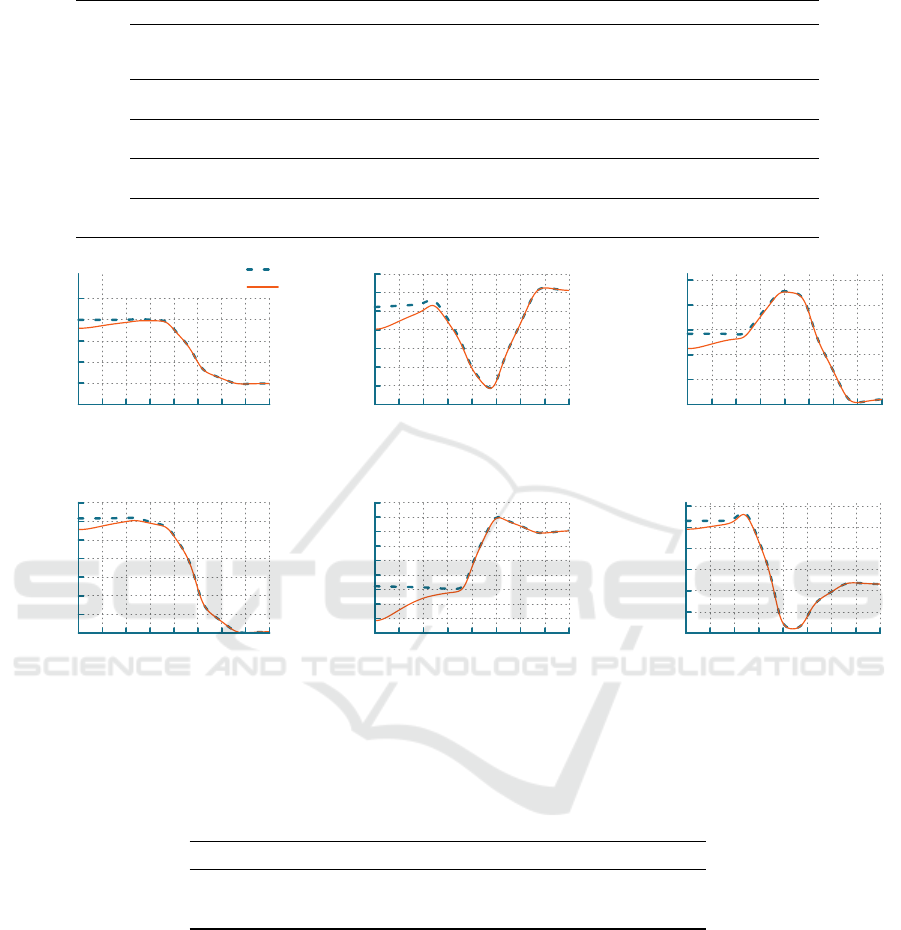
Table 3: This table presents the training time and error metrics for the maintenance tasks— 30 runs per task.
Noise Task T1 T2 T3 T4 T5
Number of demonstrations 6 4 4 4 3
Average demonstration duration [s] 33.19 ± 2.38 36.37± 2.28 32.93 ± 3.00 28.17± 3.33 26.19 ± 1.05
Training time [s] 184.08 ± 2.45 203.33 ± 4.32 185.82 ± 3.07 162.89 ± 4.56 148.59 ± 4.51
GMCC 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00
1 deg e
j
[deg] 0.14 ± 0.00 0.19 ± 0.00 0.30 ± 0.00 0.01 ± 0.00 0.05 ± 0.00
GMCC 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00
5 deg e
j
[deg] 0.14 ± 0.00 0.19 ± 0.00 0.30 ± 0.00 0.01 ± 0.00 0.05 ± 0.00
GMCC 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00
10 deg e
j
[deg] 0.14 ± 0.00 0.19 ± 0.00 0.28 ± 0.00 0.01 ± 0.00 0.05 ± 0.00
GMCC 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00 1.00 ± 0.00
20 deg e
j
[deg] 0.14 ± 0.00 0.19 ± 0.00 0.28 ± 0.00 0.015 ± 0.00 0.05 ± 0.00
−80
−50
−20
10
40
70
0 5 10 15 20 25 30 35 40
joint angle (deg)
time (s)
regression
reproduction
(a) Joint 1
−20
−10
0
10
20
30
40
50
0 5 10 15 20 25 30 35 40
time (s)
(b) Joint 2
−30
−10
10
30
50
70
0 5 10 15 20 25 30 35 40
time (s)
(c) Joint 3
−80
−60
−40
−20
0
20
40
60
0 5 10 15 20 25 30 35 40
joint angle (deg)
time (s)
(d) Joint 4
−85
−80
−75
−70
−65
−60
−55
−50
−45
−40
0 5 10 15 20 25 30 35 40
time (s)
(e) Joint 5
0
30
60
90
120
150
180
0 5 10 15 20 25 30 35 40
time (s)
(f) Joint 6
Figure 3: Reproduction and regression joint angles evolution on an example of the
T 1
task. Start joint angles of the reproduction
are computed by adding Gaussian noise with 20deg standard deviation on the regression initial joint angles. The reproduced
trajectory reproduces the regression’s motion and reach the target joint angles.
Table 4: This table presents error metrics for the factory scenario—dataset consisted of 3 to 4 demonstrations.
Task F1 F2 F3 F4
Number of reproductions 31 30 33 20
GMCC 0.99 ± 0.02 0.99 ± 0.00 0.99 ± 0.01 1.00 ± 0.00
Joints error e
j
[deg] 0.00 ± 0.00 0.02 ± 0.02 0.04 ± 0.05 0.02 ± 0.02
• F3
: find a metal frame, grab and place it on a
drilling machine while rotating the piece.
• F4
: find a wooden plank, grab one side while the
worker grabs the other, and place it together on a
drilling machine.
A custom app on a smartphone was used by the work-
ers to interact with the robot in an intuitive manner.
The app consists of two main pages: one to record
demonstrations and train a model, and another page
to give the robot a target position and start the task
reproduction. After a short training on how to use the
app, three to five demonstrations were recorded per
user, per task. To calculate the metric, each task was
reproduced around 10 times per user, apart from
F4
where only two users participated—hence
20
repro-
ductions. Detection of the different objects is done
using template matching (Brunelli, 2009).
Table 4 shows the GMCC and
e
j
for all tasks, cal-
culated for 30 reproductions of the motion for each
task. The error metrics results are similar to the ones
presented in Section 4.1, with GMCC averaging
0.99
and
e
j
of
0
deg; demonstrating accurate task reproduc-
tion in a realistic scenario.
TEAM: A Parameter-Free Algorithm to Teach Collaborative Robots Motions from User Demonstrations
575

1
2
3
4
5
A
S
CE
T
(a) User 1, day 1
1
2
3
4
5
A
S
CE
T
(b) User 1, day 2
1
2
3
4
5
A
S
CE
T
(c) User 2
1
2
3
4
5
A
S
CE
T
(d) User 3
Figure 4: After use, the cobot is evaluated by each of the users on: safety (S), easiness to teach (T), entertainment (E), reaching
the target joint angles (A), and task completion (C). In blue the results for the task F1, F2, and F3, and in red the results for the
collaborative task F4. One can see the collaborative task, where the user carries a piece of wood with the robot, is more difficult
than other task were the cobot works next to the user.
The field tests were conducted over two days and,
at the end of each day, the workers answered a ques-
tionnaire to evaluate the cobot’s performance. In the
survey, users rate the following statements on a scale
from 1 to 5, corresponding to strongly disagree, dis-
agree, neutral, agree, and strongly agree:
• The cobot learned the correct motion.
• I felt safe operating the cobot.
• The cobot reached the goal point accurately.
• Teaching the cobot a motion was simple.
• Teaching the cobot a motion was entertaining.
The radar plots in Figure 4 present survey results.
While users showed satisfaction with the cobot’s preci-
sion and motion performance, the complexity of hold-
ing the beam and moving the cobot while showing
the motion in F4 led to a lower score for easiness of
teaching compared to other tasks.
5 LIMITATIONS AND FUTURE
WORK
TEAM doesn’t consider elements of the environment
during the motion. This create confusion for the work-
ers not understanding why the cobot does not avoid
obstacles, making it harder for them to trust the cobot.
Future work will look at integrating visual information
through cameras to update the motion depending on
the environment.
Another way that TEAM could be improved is by
being able to update the attractor landscape of a motion
incrementally. Future work will look into making
the process incremental, giving workers the ability to
correct existing motions learned by the cobot.
6 SUMMARY
A method to learn motions from demonstrations requir-
ing no manual parameter tuning has been developed.
Given a set of demonstrations aligned in time, the
motion is generalized using GMM and the reference
trajectory is extracted with GMR. Since BIC criterion
can lead to over-fitting of the GMM, it is proposed to
instead use the Jensen-Shannon divergence to deter-
mine the optimal number of GMM components. The
cobot DOFs are represented as damped spring models
and the forcing term is learned to adapt the motion to
different start and goal joint poses. Parameters of the
spring model are found using Bayesian optimization.
TEAM is extensively evaluated in two field tests
where the cobot performs tasks related to elevator door
maintenance, and works in realistic scenarios with
Schindler field workers. The precision in joint angles
and motion reproduction quality are evaluated, and the
experiments show that the cobot accurately reproduces
the motions—GMCC and mean average error for the
final joint angles are around
1
and
0
respectively. Fur-
thermore, feedback collected from the field workers
shows that the cobot is positively accepted since it is
easy to teach and easy to use.
REFERENCES
Bishop, C. M. (2006). Pattern recognition and machine
learning (information science and statistics).
Brunelli, R. (2009). Template matching techniques in com-
puter vision: Theory and practice.
Calinon, S., Guenter, F., and Billard, A. (2007). On learning,
representing, and generalizing a task in a humanoid
robot. IEEE Transactions on Systems, Man, and Cy-
bernetics, Part B (Cybernetics), 37:286–298.
Cohn, D. A., Ghahramani, Z., and Jordan, M. I. (1996).
Active learning with statistical models. In NIPS.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
576

Dempster, A. P., Laird, N. M., and Rubin, D. B. (1977).
Maximum likelihood from incomplete data via the em
algorithm. Journal of the Royal Statistical Society:
Series B (Methodological), 39(1):1–22.
Garnett, R. (2022). Bayesian Optimization. Cambridge
University Press. in preparation.
Ijspeert, A. J., Nakanishi, J., Hoffmann, H., Pastor, P., and
Schaal, S. (2013). Dynamical Movement Primitives:
Learning Attractor Models for Motor Behaviors. Neu-
ral Computation, 25(2):328–373.
Kulak, T., Girgin, H., Odobez, J.-M., and Calinon, S. (2021).
Active learning of bayesian probabilistic movement
primitives. IEEE Robotics and Automation Letters,
6:2163–2170.
Lin, J. (1991). Divergence measures based on the shannon
entropy. IEEE Transactions on Information Theory,
37(1):145–151.
Pahi
ˇ
c, R., Ridge, B., Gams, A., Morimoto, J., and Ude,
A. (2020). Training of deep neural networks for the
generation of dynamic movement primitives. Neural
networks : the official journal of the International
Neural Network Society, 127:121–131.
Paraschos, A., Daniel, C., Peters, J., and Neumann, G.
(2013). Probabilistic movement primitives. In NIPS.
Pervez, A. and Lee, D. (2018). Learning task-parameterized
dynamic movement primitives using mixture of gmms.
Intelligent Service Robotics, 11:61–78.
Pervez, A., Mao, Y., and Lee, D. (2017). Learning deep
movement primitives using convolutional neural net-
works. 2017 IEEE-RAS 17th International Conference
on Humanoid Robotics (Humanoids), pages 191–197.
Rana, M. A., Chen, D., Ahmadzadeh, S. R., Williams, J.,
Chu, V., and Chernova, S. (2020). Benchmark for
skill learning from demonstration: Impact of user ex-
perience, task complexity, and start configuration on
performance. 2020 IEEE International Conference on
Robotics and Automation (ICRA), pages 7561–7567.
Sakoe, H. and Chiba, S. (1978). Dynamic programming
algorithm optimization for spoken word recognition.
IEEE Transactions on Acoustics, Speech, and Signal
Processing, 26:159–165.
Sanni, O., Bonvicini, G., Khan, M. A., L
´
opez-Custodio,
P. C., Nazari, K., and AmirM.Ghalamzan, E. (2022).
Deep movement primitives: toward breast cancer ex-
amination robot. ArXiv, abs/2202.09265.
Schaal, S. (2006). Dynamic Movement Primitives -A Frame-
work for Motor Control in Humans and Humanoid
Robotics, pages 261–280. Springer Tokyo, Tokyo.
Tosatto, S., Chalvatzaki, G., and Peters, J. (2020). Con-
textual latent-movements off-policy optimization for
robotic manipulation skills. 2021 IEEE International
Conference on Robotics and Automation (ICRA), pages
10815–10821.
Urain, J. and Peters, J. (2019). Generalized multiple correla-
tion coefficient as a similarity measurement between
trajectories. In 2019 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
1363–1369.
Welch, B. L. (1947). The generalization of ‘student’s’ prob-
lem when several different population varlances are
involved. Biometrika, 34:28–35.
Yang, Q., A. Stork, J., and Stoyanov, T. (2022). Mpr-
rl: Multi-prior regularized reinforcement learning for
knowledge transfer. IEEE Robotics and Automation
Letters, pages 1–8.
Zhou, Y., Gao, J., and Asfour, T. (2020). Movement primitive
learning and generalization: Using mixture density
networks. IEEE Robotics & Automation Magazine,
27:22–32.
TEAM: A Parameter-Free Algorithm to Teach Collaborative Robots Motions from User Demonstrations
577
