
Simulation of Steady and Transient 3D Flows via Physics-Informed Deep
Learning
Philipp Moser
a
, Wolfgang Fenz
b
, Stefan Thumfart
c
, Isabell Ganitzer
d
and Michael Giretzlehner
e
Research Department Medical Informatics, RISC Software GmbH, Softwarepark 32a, 4232 Hagenberg, Austria
Keywords:
Physics-Informed Neural Networks, Fluids, Navier-Stokes, Deep Learning.
Abstract:
Physics-Informed deep learning methods are attracting increased attention for modeling physical systems due
to their mesh-free approach, their straightforward handling of forward and inverse problems, and the possi-
bility to seamlessly include measurement data. Today, most learning-based flow modeling reports rely on
the representational power of fully-connected neural networks, although many different architectures have
been introduced into deep learning, each with specific benefits for certain applications. In this paper, we suc-
cessfully demonstrate the application of physics-informed neural networks for modeling steady and transient
flows through 3D geometries. Our work serves as a practical guideline for machine learning practitioners by
comparing several popular network architectures in terms of accuracy and computational costs. The steady
flow results were in good agreement with finite element-based simulations, while the transient flows proved
more challenging for the continuous-time PINN approaches. Overall, our findings suggest that standard fully-
connected neural networks offer an efficient balance between training time and accuracy. Although not readily
supported by statistical/practical significance, we could identify a few more complex architectures, namely
Fourier networks and Deep Galerkin Methods, as attractive options for accurate flow modeling.
1 INTRODUCTION
In recent years, the remarkable advances of deep
learning (DL) in various domains (e.g., computer vi-
sion and natural language processing) have inspired
vibrant research on applying DL to obtain solutions
for physical models, which, in general, has become
an integral part of modern science. While physics-
based DL comprises a variety of conceptually dif-
ferent approaches (Karniadakis et al., 2021), we fo-
cus on physics-informed DL that encodes physical in-
formation (typically expressed as partial differential
equations (PDEs) with suitable initial/boundary con-
ditions) into the loss function of a neural network,
hence, constraining the network’s trainable param-
eters. An overview of Raissi’s general framework
of physics-informed neural networks (PINNs) (Raissi
et al., 2019) is given in Section 1.1. Compared to con-
a
https://orcid.org/0000-0002-9717-6197
b
https://orcid.org/0000-0002-6143-3024
c
https://orcid.org/0000-0001-9838-3641
d
https://orcid.org/0000-0003-3600-0857
e
https://orcid.org/0000-0003-1620-1002
ventional computational fluid dynamics (CFD) meth-
ods, PINNs operate without the need to mesh the sim-
ulation geometry and can easily handle forward sim-
ulations (predicting state or temporal evolution) or in-
verse problems (e.g., obtaining a parametrization for
a physical system from observations).
Fluid mechanics is among the most active research
topics due to (a) the complex underlying Navier-
Stokes equations, (b) the lack of general analytic
solutions and (c) the widespread applications (e.g.,
biomedical engineering, geophysics, aerospace). Se-
lected PINN applications include the prediction of
near-wall blood flow from sparse data (Arzani et al.,
2021), direct turbulence modeling (Jin et al., 2021),
solving the Reynolds-averaged Navier–Stokes equa-
tions (Eivazi et al., 2022), tackling ill-posed inverse
fluid-mechanics problems (Raissi et al., 2020), or
mixed-variable PINN schemes for 2D flows (Rao
et al., 2020).
Deep learning is a fast-evolving field of research
where many network architectures and add-ons (e.g.,
Fourier encoding layers, adaptive activation func-
tions, skip connections) have been proposed (Choud-
hary et al., 2022; Markidis, 2021). Despite the broad
Moser, P., Fenz, W., Thumfart, S., Ganitzer, I. and Giretzlehner, M.
Simulation of Steady and Transient 3D Flows via Physics-Informed Deep Learning.
DOI: 10.5220/0012078600003546
In Proceedings of the 13th Inter national Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 243-250
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
243
architectural variety, to date the majority of PINN-
based flow simulations have employed simple fully-
connected neural networks (FCNNs) (Jin et al., 2021;
Eivazi et al., 2022; Oldenburg et al., 2022; Arzani
et al., 2021; Amalinadhi et al., 2022). Only few
publications report the use of more complex network
architectures, such as convolutional neural networks
(CNNs) (Ma et al., 2022; Eichinger et al., 2021;
Guo et al., 2016; Gao et al., 2021) or Deep Galerkin
Methods (DGMs) (Matsumoto, 2021; Li et al., 2022).
While this is related to the early development phase of
PINNs and the initial focus on feasibility and proof-
of-concept (Cuomo et al., 2022; Karniadakis et al.,
2021), the increasing interest in PINNs motivates the
integration and evaluation of recent DL developments
that have shown promising results in other applica-
tions. Comparing results across publications is of-
ten difficult because of significant variations in sim-
ulation domains (2D or 3D), fluid characteristics and
evaluation metrics.
In this paper, we fill this gap and provide the
first comprehensive comparison of several popular
network architectures for modeling steady and tran-
sient flows in 3D geometries. Besides standard FC-
NNs, we evaluate the computational costs and accu-
racy of (in total) seven different architectures using
finite element-based CFD models as references. Our
comparative analysis intends to highlight the potential
but also the challenges of current PINN architectures
for modeling fluid dynamics.
1.1 Principles of Physics-Informed
Neural Networks
In general, a physical system is governed by a set
of PDEs that describe the variation of some physical
quantity u (e.g., velocity in the case of fluid dynam-
ics) at points x ∈ Ω (i.e., points within a geometry
Ω). Most often, these PDEs are accompanied by (a)
boundary conditions B which specify the values of u
at points x on the boundary ∂Ω and (b) initial condi-
tions I which define the values of u at t = 0.
Raissi et al. introduced PINNs (Raissi et al.,
2019), which aim at approximating the complex (and
nonlinear) solution function u via a deep neural net-
work. Physics information (given by the underlying
PDE), boundary constraints, initial conditions as well
as sparse measurement data (if available) are inte-
grated into the loss function of a neural network:
L
tot
= L
PDE
+ L
BC
+ L
IC
+
h
L
data
i
. (1)
L
PDE
evaluates (via the two-norm
∥
·
∥
) the PDE’s
residual on randomly sampled points within the ge-
x
Neural network Auto-differentiation Loss function
Adam optimizer
Update NN's
weights & biases
u
v
w
p
y
z
t
Total loss function
physics-informed loss
BC-related loss
IC-related loss
data-informed loss
∂
t
(n)
∂
x
∂
x
σ
σ
σ
σ
σ
σ
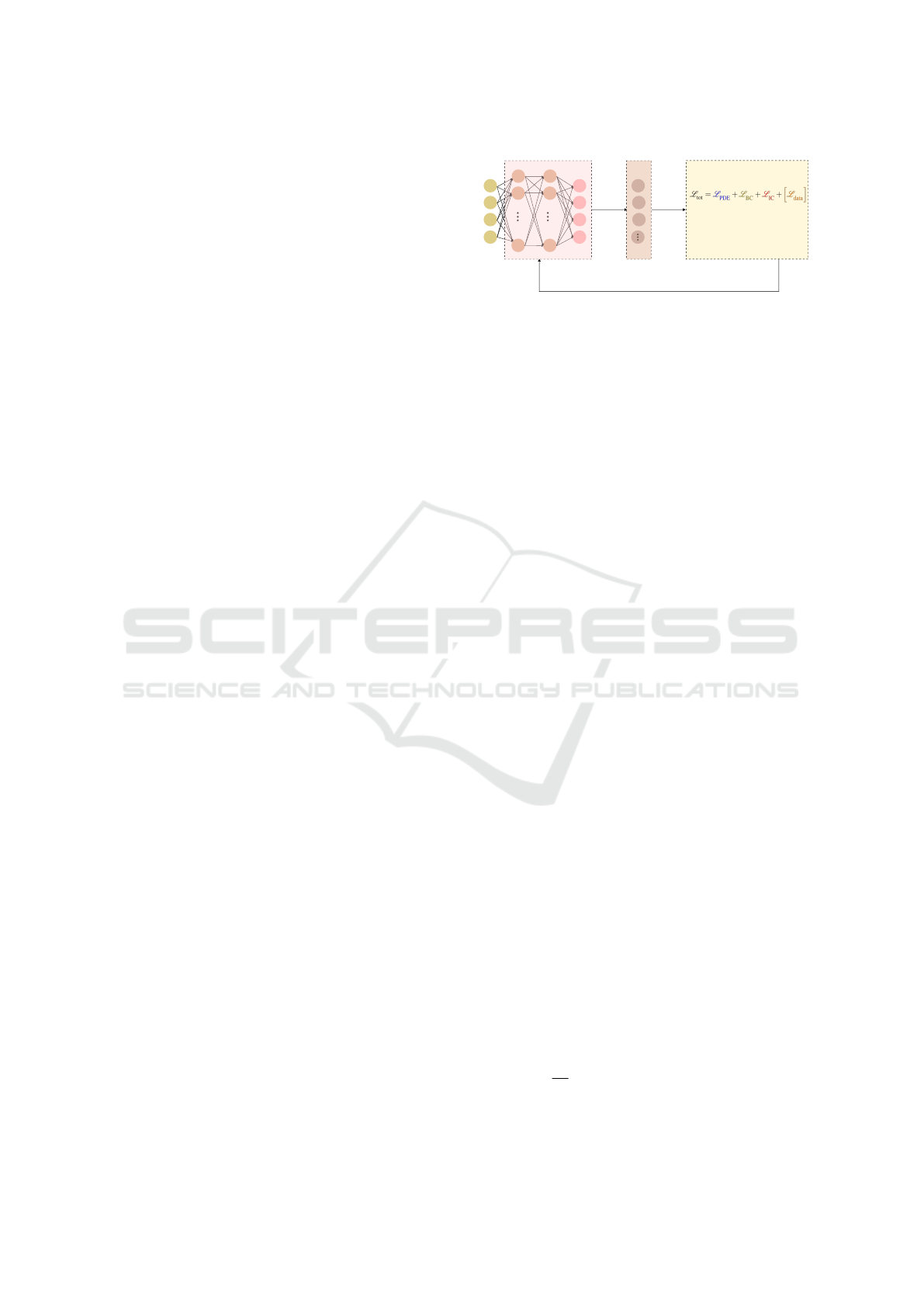
Figure 1: Schematic of a PINN. The physical quantities of
interest are (u, v, w, p) and the spatio-temporal coordinates
are (x, y, z, t). σ is the activation function.
ometry Ω
L
PDE
=
N (x, u,t)
Ω
, (2)
with N being the PDE’s nonlinear differential oper-
ator. L
BC
is sampled on points on the boundary ∂Ω
where boundary conditions B are known:
L
BC
=
∥
B(x, u,t)
∥
∂Ω
, (3)
while L
IC
is calculated from initial conditions I with
sampling points at t = 0:
L
IC
=
∥
I (x, u,t = 0)
∥
. (4)
The data loss term L
data
is evaluated on discrete
points Γ where additional measurement data D is
available:
L
data
=
∥
u − D
∥
Γ
. (5)
The PINN training process is depicted in Figure 1.
A neural network generates estimates for u on a set
of randomly sampled spatio-temporal points (x, y, z,t).
Using auto-differentiation, all necessary derivatives
are generated and allow for the calculation of the
PDE-related (physics-informed) loss term L
PDE
. The
total loss function L
tot
is constructed by adding all
four loss terms in Eq. 1. While training the network,
the optimal set of weights and biases of the neural
network is being sought, for which the total loss func-
tion is minimized and the resulting estimates for u ap-
proach the true solution.
2 METHODS
2.1 Simulation Model, Geometries and
Ground Truth
The flow of incompressible Newtonian fluids is de-
scribed by the Navier-Stokes and continuity equa-
tions:
ρ
∂u
∂t
+ (u · ∇)u
− µ∇
2
u + ∇p = 0, (6)
∇ · u = 0. (7)
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
244

Cylinder
(b)
(a)
Stenosed Cylinder
(c)
0.2
v [m/s]
0.0
0.0 0.5 1.0 1.5 2.0
t [s]
0.2
0.4
0.6
0.8
1.0
f(t)
Figure 2: (a) The parabolic inlet velocity profile, (b) the
time-varying inflow function f (t), (c) the two studied ge-
ometries. The inflow is indicated by a red arrow.
u = u(x, t) = [u(x,t), v(x,t), w(x,t)]
⊺
denotes the ve-
locity vector and p = p(x,t) is the pressure field. The
inflow was set perpendicular to the inlet plane with a
parabolic velocity profile:
u
inlet
(r) = u
max
1 −
r
2
R
2
, (8)
with r being the radial distance from the inlet cen-
ter and R being the radius of a cylindrical inlet. The
central peak velocity u
max
was set to 0.2 m/s, see Fig-
ure 2a. A pulsatile flow was generated by a tempo-
rally varying function f (t) using a Gaussian-shaped
pulse with a duration of 1.0 s, see Figure 2b. The en-
tire time-varying inflow profile u
inlet
(r, t) is obtained
by multiplying u
inlet
(r) (from Eq. 8) and f (t) (de-
picted in Figure 2b). The total simulation time was
set to 2.0 s.
We modeled two cylindrical geometries (Fig-
ure 2c) that frequently appear in various engineering
domains (e.g., modeling healthy and diseased arteries
in computational hemodynamics). Specifically, the
first system was the laminar flow of a fluid (density
ρ = 1233 kg/m
3
, dynamic viscosity µ = 0.20393 Pa·s,
Reynolds number Re = 1209) through a regular cylin-
der (radius: 0.5 m, length: 5 m). The second geome-
try was a cylinder with a stenosis created by a sphere
of radius of 0.5 m centered on its surface 1.25 m from
the inlet. The fluid parameters (ρ = 616.5 kg/m
3
,
µ = 0.40786 Pa·s, Re = 302) differed from the first
system to showcase PINN’s ability to handle various
regimes of laminar fluid properties. We employed the
following boundary conditions: no-slip conditions on
the geometry walls (u, v, w = 0) and the pressure set
to zero at the outlet (p = 0).
Ground truth (reference) distributions of velocity
and pressure were generated via finite-element-based
simulations using the framework MODSIM, an in-
house CFD software suite (Fenz et al., 2010; Fenz
et al., 2016; Gmeiner et al., 2018). Both CFD geome-
tries had around 600k mesh points. All simulations
(i.e., PINN and CFD modeling) were performed on a
workstation with an Intel i9-11900 (CPU), NVIDIA
GeForce RTX 3080 Ti (GPU) and 64 GB RAM.
2.2 Network Architectures
We implemented all PINN architectures within
NVIDIA’s Modulus framework v22.03 (Hennigh
et al., 2021; NVIDIA, 2022). For comparison pur-
poses, the same network size (6 layers with 256 neu-
rons each), swish activation functions (β=1), expo-
nentially decaying learning rates (initial learning rate:
0.0005, decay rate: 0.97, decay steps: 20005) and
Adam optimizers were used across all network archi-
tectures. In the following, the seven studied architec-
tures are briefly summarized. More information can
be obtained in the referenced original publications.
2.2.1 Fully Connected Neural Networks
In the standard version, all neurons of one layer are
connected to each neuron in the next layer. The output
of an n-layer FCNN u
net
(x;θ) reads
u
net
(x;θ) = W
n
{φ
n−1
◦φ
n−2
◦ ··· ◦ φ
1
}(x)+b
n
, (9)
φ
i
(x
i
) = σ(W
i
x
i
+ b
i
), (10)
where φ
i
is the i
th
layer, W
i
and b
i
are the weights
and biases of the i
th
layer. θ refers to the trainable
parameters {W
i
, b
i
}
n
i=1
. Throughout the architecture
descriptions, σ is the activation function and the vec-
tor notation x includes all spatial and temporal coor-
dinates x = (x, y, z;t).
The second architecture (termed FCNNaa) is a
variation of simple FCNNs and features adaptive acti-
vation functions as suggested by Jagtap et al. (Jagtap
et al., 2020). A global, trainable, multiplicative pa-
rameter α is added to the activation functions and the
i
th
layer of the FCNN, hence, becomes
φ
i
(x
i
) = σ(α · (W
i
x
i
+ b
i
)). (11)
The third architecture (termed FCNNskip) is a further
variation of FCNNs which includes skip connections
every two hidden layers. Originally introduced into
deep learning for addressing the vanishing gradient
problem (He et al., 2016), skip connections feed the
output of one layer as the input to the next layers (in-
stead of only the subsequent layer).
2.2.2 Fourier Networks
The fourth architecture (termed FN) is a Fourier net-
work which tries to reduce spectral biases (Rahaman
et al., 2019; Tancik et al., 2020; Mildenhall et al.,
2020). A FCNN architecture is modified by adding
an initial Fourier encoding layer φ
E
that includes a
trainable frequency matrix m
ν
:
u
net
(x;θ) = W
n
{φ
n−1
◦ φ
n−2
◦ ···◦ φ
1
◦ φ
E
}(x)+b
n
,
(12)
Simulation of Steady and Transient 3D Flows via Physics-Informed Deep Learning
245

φ
E
= [sin (2πm
ν
· x); cos (2πm
ν
· x)]
T
. (13)
The fifth architecture (termed modFN) is a mod-
ified Fourier network. It uses two additional layers
that transform the Fourier features to a learned feature
space and transfer the information flow to the other
hidden layers via Hadamard multiplications (denoted
by ⊙) (Wang et al., 2021). Here, the i
th
layer reads:
φ
i
(x
i
) = (1 − σ(W
i
x
i
+ b
i
)) ⊙ σ(W
T
1
φ
E
+ b
T
1
) +
σ(W
i
x
i
+ b
i
) ⊙ σ(W
T
2
φ
E
+ b
T
2
) for i > 1.
(14)
The additional trainable parameters
{W
T
1
, b
T
1
, W
T
2
, b
T
2
} belong to the two added
transformation layers.
2.2.3 Multiplicative Filter Network (MFN)
The sixth architecture is a Fourier MFN which gen-
erates representational power through repeated multi-
plications of sinusoidal wavelet functions f(x, ξ
i
) ap-
plied to the input (Fathony et al., 2021):
f(x, ξ
i
) = sin (ω
i
x + φ
i
) with ξ
i
= (ω
i
, φ
i
),
φ
1
= f(x, ξ
1
),
φ
i+1
= σ(W
i
φ
i
+ b
i
) ⊙ f (x, ξ
i+1
), ∀i ∈ {1, ..., n − 1},
u
net
(x;θ) = W
n
φ
n
+ b
n
(15)
2.2.4 Deep Galerkin Method (DGM)
The DGM approach as proposed by Sirignano and
Spiliopoulos is the seventh architecture. Inspired
by the well-established Galerkin method, the DGM
replaces the linear combination of basis functions
to approximate the PDE’s solution by a deep neu-
ral network. The architecture is rather complex and
has some similarities to Long Short-Term Memory
(LSTM) networks. For the explicit network struc-
ture, we refer to the original publication (Sirignano
and Spiliopoulos, 2018).
2.3 Evaluation Metrics
To compare the accuracy of the PINN results against
CFD simulations, we calculated mean absolute er-
rors (MAE) and standard deviations of absolute er-
rors (STD of AE) of the physical quantities of inter-
est (i.e., absolute velocity and pressure): The PINNs
were evaluated at the CFD mesh points and the error
metrics were calculated based on the absolute differ-
ences of the PINN and CFD solutions.
Regarding statistical analysis, we calculated Co-
hen’s effect size d (Lakens, 2013) to assess the prac-
tical significance of the differences in MAEs between
the best-performing architecture and all others.
3 RESULTS
3.1 Steady Flow
For the steady flow simulations, the MAEs and STDs
of AE for all used PINN architectures are summarized
in Table 1. In the regular cylinder, the lowest MAE in
absolute velocity was obtained for the FN architec-
ture. However, all MAEs were close to each other
with overlapping 95% confidence intervals and effect
sizes d below 0.2 suggesting practically insignificant
differences in accuracy among the architectures.
In the stenosed cylinder, the MAEs in absolute ve-
locity had a broader range and the values were gen-
erally higher (which was expected due to the higher
geometrical complexity), with modFN performing
far worse than all other architectures. The DGM
performed best, however, the effect sizes between
DGM and the other architectures were small indicat-
ing rather low practical importance.
In both cylinder geometries, FCNNskip per-
formed best in terms of pressure MAE, while modFN
performed worst with effect sizes d > 0.9 suggesting
considerably worse results.
Figure 3 depicts the predicted (i.e., learned) distri-
butions of the absolute velocity and pressure as well
as their absolute deviations from CFD references. At
the inlet of the regular cylinder, a mean pressure of
3.38 Pa was obtained with FCNNskip, while the an-
alytic values would be 3.26 Pa (calculated via the
Hagen–Poiseuille equation which describes the flow
pressure drop in a cylindrical pipe).
Stenosed Cylinder (DGM)
Absolute Errors
Cylinder (FN)
Figure 3: Steady flow simulations: The predicted absolute
velocity and pressure distributions (first row), as well as
their absolute errors (AEs) (second row). The shown ar-
chitectures were chosen based on the best absolute velocity
estimates.
The training times for one epoch are also compiled
in Table 1 and show significant variations: The DGM,
for example, required about a factor 3.9 more time to
train than a standard FCNN. In absolute numbers, the
FCNN training (with 350 epochs) of the steady flow
system took around 9.6 hours on our hardware.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
246

Table 1: Steady flow simulations: Errors metrics for the various PINN architectures. Note: The velocity errors are given in
mm/s. The percentage values in the last column are relative to the FCNN architecture. Bold numbers indicate the best results.
MAE and STD of AEs Training time
Cylinder Stenosed Cylinder per epoch [s]
Abs Vel [mm/s] Pressure [Pa] Abs Vel [mm/s] Pressure [Pa]
FCNN 0.838±0.405 0.075±0.060 1.024±0.899 0.066±0.075 99 (100%)
FCNNaa 0.837±0.406 0.073±0.062 0.990±0.823 0.054±0.075 113 (114%)
FCNNskip 0.819±0.412 0.068±0.058 1.201±1.107 0.052±0.054 101 (102%)
FN 0.801±0.387 0.076±0.061 1.188±1.051 0.055±0.079 100 (101%)
modFN 0.813±0.486 0.342±0.194 25.514±24.163 1.696±1.226 178 (178%)
MFN 0.838±0.383 0.105±0.051 0.918±0.840 0.056±0.072 103 (104%)
DGM 0.843±0.387 0.076±0.046 0.819±0.693 0.053±0.075 384 (388%)
3.2 Transient Flow
For the transient flow simulations, we calculated
MAEs every 0.05 seconds and visualize their tempo-
ral evolution in Figure 4. Overall, the lowest MAEs
were recorded for the FCNN, FN and DGM archi-
tectures, while MFN and modFN performed signifi-
cantly worse. MAEs of absolute velocity were gen-
erally lower than for the pressure estimates. For
all architectures, the highest MAEs occured between
t = 0.5 s and t = 1.0 s (which includes the peak of
the Gaussian inflow profile and the region of fastest
change in inflow). Still, differences regarding the
shape of the temporal MAE curves were observed
among architectures.
The predicted absolute velocity and pressure dis-
tributions at three specific points in time are visual-
ized in Figure 5. The time point t = 1.00 s corre-
sponds to the half maximum on the right side of the
inflow profile (see Figure 4). Noticeable deviations
were observed throughout the pressure estimates with
relative AEs (i.e., AEs normalized by the absolute
CFD reference) being highest in the flat part of the
inflow profile.
4 DISCUSSION
An integral part of an effective and efficient learn-
ing framework involves the design and selection of
the network architecture. The training process (i.e.,
the convergence and accuracy of the learned solution)
can be positively influenced when a domain-intrinsic
property is reflected within the architecture. CNNs,
for example, unfold their strength in image-related
tasks as convolution operators reflect the translational
invariance of images. Unfortunately, no such intrinsic
symmetry was identified for PINN-based fluid mod-
eling, which results in PINNs mostly relying on the
representational power of FCNNs. Also, our PINN
approach of randomly sampling points within (irreg-
ular) geometries prohibited the use of convolutional
architectures as these rely on structured grids (as is
the case for images). Future research in geometric
DL may provide ways of leveraging convolutions in
non-Euclidean spaces.
In this paper, we have not only successfully
demonstrated the modeling of steady and transient
3D flows, but also investigated the performance of
various network architectures. To our knowledge a
comparable evaluation has only been published for
steady flows so far (Moser et al., 2023), while tran-
sient flows have not been investigated before. Over-
all, the learned solutions were in good agreement with
CFD references, especially for the steady flows, while
the increased complexity of time-dependent systems
was obviously more challenging. The higher errors
of the transient pressure estimates can be attributed to
the networks struggling with multi-scale issues: The
pressure distributions ranged over 4000 Pa, resulting
in single-digit pressures being challenging to resolve.
Although benefits (improved convergence and so-
lution accuracy) were reported for adaptive activation
functions (Jagtap et al., 2020), we did not observe dis-
tinct improvements compared to standard FCNNs that
would favor their usage, especially when taking into
account their higher computational costs. Our find-
ings regarding FCNNskip were mixed since the best
pressure estimates were obtained with FCNNskip in
the steady flow simulations, while the transient flow
results lagged behind standard FCNNs at equally fast
training times. FNs and DGMs achieved overall good
results and could match/outperform FCNNs. We ob-
tained good results with MFNs for the steady flow
simulations, but their multiplicative way of generat-
ing representational power was insufficient for time-
dependent problems.
Significant differences in computational costs
were observed among the studied network architec-
tures which are mainly dominated by the complex-
ity of the architecture (e.g., the number of trainable
Simulation of Steady and Transient 3D Flows via Physics-Informed Deep Learning
247
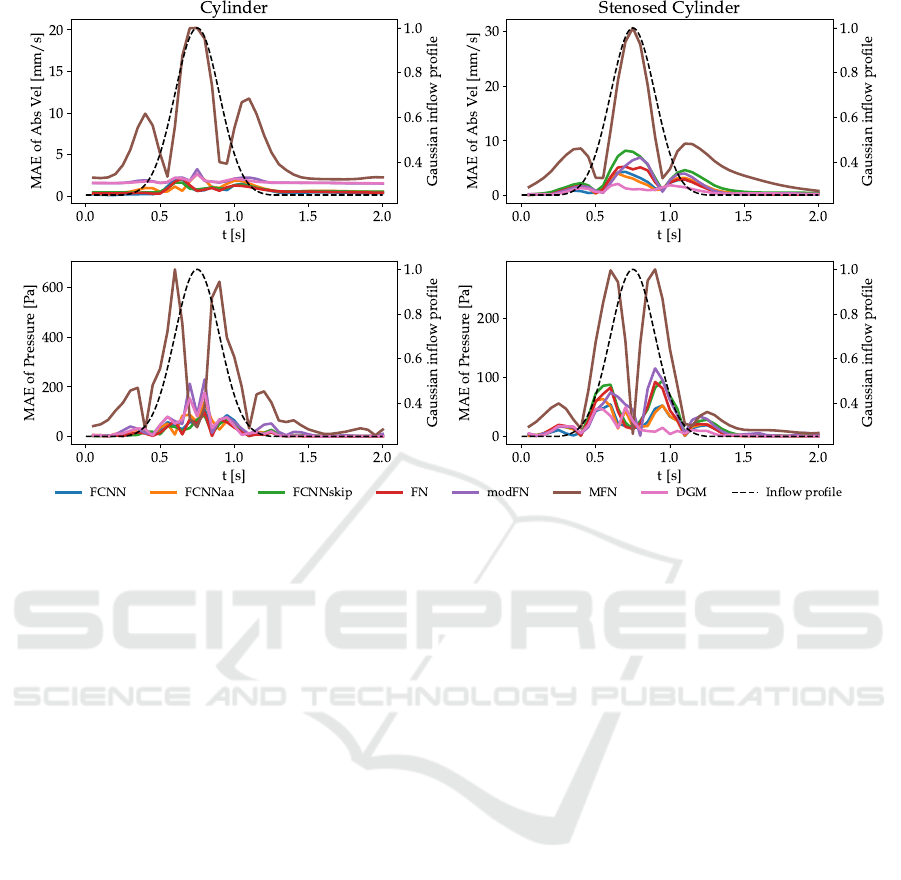
Figure 4: Transient flow simulations: The MAEs of the predicted absolute velocity (given in mm/s) and pressure distributions.
Note: The dashed line is the Gaussian inflow profile which serves only as temporal guidance and is not the ”target curve”.
parameters). The DGM, for example, uses roughly
eight times more parameters in each hidden layer than
a usual dense layer (Al-Aradi et al., 2022), which sig-
nificantly increases memory consumption and train-
ing time. While the presented relative computational
times are generally applicable, the absolute training
times are highly dependent on the available resources.
Multi-GPU systems and efficient handling of tensor
operations (e.g., NVIDIA’s TensorFloat-32) should
further accelerate the training.
Overall, our findings suggest that FCNNs (with or
without skip connections) are an efficient (accuracy
per unit training time) starting point due to their fast
training and consistent mid-to-high-tier results. Keep-
ing in mind that differences in accuracy were not al-
ways supported by (practical) significance, we could
still identify a trend that some more complex archi-
tectures, such as FNs or DGMs, might be attractive
options for complex flow modeling.
In this paper, we employed the continuous time
approach for transient systems, i.e., the time is treated
similar to the other continuous, spatial variables.
While this is a straightforward extension of steady-
state modeling, one potential limitation is the high
amount of sampling points needed to enforce physics
constraints in the entire spatio-temporal domain, es-
pecially in higher dimensions, longer simulation time
spans and complex geometries. Other publications
have discussed improvements of discrete time models
(Runge-Kutta time-stepping schemes) (Raissi et al.,
2019) or alternative network architectures (e.g., Re-
current Neural Networks) for modeling (longer) tem-
poral dynamics (Wu et al., 2022).
In this paper, we restrict our simulations to lam-
inar flows at low Reynolds numbers. However, the
PINN approach could readily be applied to turbu-
lent flows with higher Reynolds numbers since turbu-
lences are inherently described by the Navier-Stokes
equation. To adequately resolve (chaotic) changes in
pressure and flow velocities, (a) significantly more
sampling points would be necessary during train-
ing (increased memory consumption and computation
times) or (b) alternative approaches such as super-
resolution (Jiang et al., 2020) could be applied.
Future research may investigate the influence of
network hyperparameters, such as network sizes and
activation functions. Also, the generalizability of
a trained network to changes in fluid parameters or
geometry may involve fine-tuning/transfer-learning
techniques, which remains an effort for future stud-
ies.
5 CONCLUSIONS
In this paper, we addressed the practically relevant
question which network architectures in the rapidly
evolving field of deep learning provide good learning
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
248

Stenosed Cylinder (DGM)
Cylinder (FCNN)
t= 0.0 s t= 1.0 s
t= 2.0 s
Figure 5: Transient flow simulations: The predicted abso-
lute velocity and pressure distributions, as well as their ab-
solute errors are shown for three distinct points in time. The
network architectures with the best velocity estimates are
shown. Note: The absolute velocity and their error distribu-
tions share a common color range.
abilities to model the dynamics of fluids in 3D ge-
ometries. While steady flows could be modeled with
high accuracy, the transient flows were more chal-
lenging to resolve with our continuous-time PINNs.
We conclude that while the investigated PINN imple-
mentations were in general capable of modeling the
complex behavior of fluids, future architectures that
intrinsically reflect some underlying physical prop-
erty/symmetry and adequately handle multi-scale be-
haviors have the potential to outperform current ap-
proaches.
ACKNOWLEDGEMENTS
This project is financed by research subsidies granted
by the government of Upper Austria within the re-
search projects MIMAS.ai, MEDUSA (FFG grant no.
872604) and ARES (FFG grant no. 892166). RISC
Software GmbH is Member of UAR (Upper Austrian
Research) Innovation Network.
REFERENCES
Al-Aradi, A., Correia, A., Jardim, G., de Freitas Naiff,
D., and Saporito, Y. (2022). Extensions of the deep
galerkin method. Applied Mathematics and Computa-
tion, 430:127287.
Amalinadhi, C., Palar, P. S., Stevenson, R., and Zuhal, L.
(2022). On physics-informed deep learning for solv-
ing navier-stokes equations. In AIAA SCITECH 2022
Forum.
Arzani, A., Wang, J.-X., and D’Souza, R. M. (2021). Un-
covering near-wall blood flow from sparse data with
physics-informed neural networks. Physics of Fluids,
33(7):071905.
Choudhary, K., DeCost, B., Chen, C., Jain, A., Tavazza, F.,
Cohn, R., Park, C. W., Choudhary, A., Agrawal, A.,
Billinge, S. J. L., Holm, E., Ong, S. P., and Wolver-
ton, C. (2022). Recent advances and applications of
deep learning methods in materials science. npj Com-
putational Materials, 8(1):1–26.
Cuomo, S., Di Cola, V. S., Giampaolo, F., Rozza, G.,
Raissi, M., and Piccialli, F. (2022). Scientific machine
learning through physics–informed neural networks:
Where we are and what’s next. Journal of Scientific
Computing, 92(3):88.
Eichinger, M., Heinlein, A., and Klawonn, A. (2021). Sta-
tionary flow predictions using convolutional neural
networks. Lecture Notes in Computational Science
and Engineering, Numerical Mathematics and Ad-
vanced Applications ENUMATH 2019, pages 541–
549.
Eivazi, H., Tahani, M., Schlatter, P., and Vinuesa, R.
(2022). Physics-informed neural networks for solving
reynolds-averaged navier–stokes equations. Physics
of Fluids, 34(7):075117.
Fathony, R., Sahu, A. K., Willmott, D., and Kolter, J. Z.
(2021). Multiplicative filter networks. In International
Conference on Learning Representations.
Fenz, W., Dirnberger, J., and Georgiev, I. (2016).
Blood flow simulations with application to cerebral
aneurysms. In Proceedings of the Modeling and Simu-
lation in Medicine Symposium, pages 3:1–3:8. Society
for Computer Simulation International.
Fenz, W., Dirnberger, J., Watzl, C., and Krieger, M. (2010).
Parallel simulation and visualization of blood flow in
intracranial aneurysms. In 11th IEEE/ACM Interna-
tional Conference on Grid Computing, pages 153–
160. ISSN: 2152-1093.
Simulation of Steady and Transient 3D Flows via Physics-Informed Deep Learning
249

Gao, H., Sun, L., and Wang, J.-X. (2021). Phy-
GeoNet: Physics-informed geometry-adaptive convo-
lutional neural networks for solving parameterized
steady-state PDEs on irregular domain. Journal of
Computational Physics, 428:110079.
Gmeiner, M., Dirnberger, J., Fenz, W., Gollwitzer, M.,
Wurm, G., Trenkler, J., and Gruber, A. (2018). Virtual
cerebral aneurysm clipping with real-time haptic force
feedback in neurosurgical education. World Neuro-
surgery, 112:e313–e323.
Guo, X., Li, W., and Iorio, F. (2016). Convolutional neural
networks for steady flow approximation. In Proceed-
ings of the 22nd ACM SIGKDD International Con-
ference on Knowledge Discovery and Data Mining,
KDD ’16, pages 481–490.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Hennigh, O., Narasimhan, S., Nabian, M. A., Subrama-
niam, A., Tangsali, K., Fang, Z., Rietmann, M.,
Byeon, W., and Choudhry, S. (2021). NVIDIA Sim-
Net™: an AI-accelerated multi-physics simulation
framework. In Computational Science – ICCS 2021:
21st International Conference, Krakow, Poland, Pro-
ceedings, Part V, page 447–461. Springer-Verlag.
Jagtap, A. D., Kawaguchi, K., and Karniadakis, G. E.
(2020). Adaptive activation functions accelerate con-
vergence in deep and physics-informed neural net-
works. Journal of Computational Physics, 404.
Jiang, C. M., Esmaeilzadeh, S., Azizzadenesheli, K.,
Kashinath, K., Mustafa, M., Tchelepi, H. A., Marcus,
P., Prabhat, M., and Anandkumar, A. (2020). MESH-
FREEFLOWNET: A physics-constrained deep con-
tinuous space-time super-resolution framework. In
SC20: International Conference for High Perfor-
mance Computing, Networking, Storage and Analysis,
pages 1–15.
Jin, X., Cai, S., Li, H., and Karniadakis, G. E. (2021).
NSFnets (navier-stokes flow nets): Physics-informed
neural networks for the incompressible navier-stokes
equations. Journal of Computational Physics,
426:109951.
Karniadakis, G. E., Kevrekidis, I. G., Lu, L., Perdikaris,
P., Wang, S., and Yang, L. (2021). Physics-informed
machine learning. Nature Reviews Physics, 3(6):422–
440.
Lakens, D. (2013). Calculating and reporting effect sizes
to facilitate cumulative science: a practical primer for
t-tests and ANOVAs. Frontiers in Psychology, 4.
Li, J., Yue, J., Zhang, W., and Duan, W. (2022). The deep
learning galerkin method for the general stokes equa-
tions. Journal of Scientific Computing, 93(1):5.
Ma, H., Zhang, Y., Thuerey, N., null, X. H., and Haidn, O. J.
(2022). Physics-driven learning of the steady navier-
stokes equations using deep convolutional neural net-
works. Communications in Computational Physics,
32(3):715–736.
Markidis, S. (2021). The old and the new: Can
physics-informed deep-learning replace traditional
linear solvers? Frontiers in Big Data, 4.
Matsumoto, M. (2021). Application of deep galerkin
method to solve compressible navier-stokes equations.
Transactions of the Japan Society for Aeronautical
and Space Sciences, 64:348–357.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2020). NeRF: Repre-
senting scenes as neural radiance fields for view syn-
thesis. In Computer Vision – ECCV 2020, Lecture
Notes in Computer Science, pages 405–421. Springer
International Publishing.
Moser, P., Fenz, W., Thumfart, S., Ganitzer, I., and Giret-
zlehner, M. (2023). Modeling of 3d blood flows
with physics-informed neural networks: Comparison
of network architectures. Fluids, 8(2):46. Number: 2
Publisher: MDPI.
NVIDIA (2022). NVIDIA Modulus Framework.
https://developer.nvidia.com/modulus. accessed
12/2022.
Oldenburg, J., Borowski, F.,
¨
Oner, A., Schmitz, K.-P., and
Stiehm, M. (2022). Geometry aware physics informed
neural network surrogate for solving navier–stokes
equation (GAPINN). Advanced Modeling and Sim-
ulation in Engineering Sciences, 9(1):8.
Rahaman, N., Baratin, A., Arpit, D., Draxler, F., Lin,
M., Hamprecht, F. A., Bengio, Y., and Courville, A.
(2019). On the spectral bias of neural networks. In
Proceedings of the 36th International Conference on
Machine Learning, volume 97:5301-5310.
Raissi, M., Perdikaris, P., and Karniadakis, G. E. (2019).
Physics-informed neural networks: A deep learn-
ing framework for solving forward and inverse prob-
lems involving nonlinear partial differential equations.
Journal of Computational Physics, 378:686–707.
Raissi, M., Yazdani, A., and Karniadakis, G. E. (2020).
Hidden fluid mechanics: Learning velocity and
pressure fields from flow visualizations. Science,
367(6481):1026–1030.
Rao, C., Sun, H., and Liu, Y. (2020). Physics-informed deep
learning for incompressible laminar flows. Theoreti-
cal and Applied Mechanics Letters, 10(3):207–212.
Sirignano, J. and Spiliopoulos, K. (2018). DGM: A
deep learning algorithm for solving partial differen-
tial equations. Journal of Computational Physics,
375:1339–1364.
Tancik, M., Srinivasan, P., Mildenhall, B., Fridovich-Keil,
S., Raghavan, N., Singhal, U., Ramamoorthi, R., Bar-
ron, J., and Ng, R. (2020). Fourier features let net-
works learn high frequency functions in low dimen-
sional domains. In Advances in Neural Information
Processing Systems, volume 33:7537-7547. Curran
Associates, Inc.
Wang, S., Teng, Y., and Perdikaris, P. (2021). Under-
standing and mitigating gradient flow pathologies in
physics-informed neural networks. SIAM Journal on
Scientific Computing, 43(5):A3055–A3081.
Wu, B., Hennigh, O., Kautz, J., Choudhry, S., and Byeon,
W. (2022). Physics informed RNN-DCT networks
for time-dependent partial differential equations. In
Computational Science – ICCS 2022, Lecture Notes
in Computer Science, pages 372–379. Springer Inter-
national Publishing.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
250
