
Multi-Scale Surface Normal Estimation from Depth Maps
Diclehan Ulucan, Oguzhan Ulucan and Marc Ebner
Institut für Mathematik und Informatik, Universität Greifswald,
Walther-Rathenau-Straße 47, 17489 Greifswald, Germany
Keywords:
Intrinsic Image Decomposition, Surface Normal Estimation, Depth Map, Scale-Space.
Abstract:
Surface normal vectors are important local descriptors of images, which are utilized in many applications in
the field of computer vision and computer graphics. Hence, estimating the surface normals from structured
range sensor data is an important step for many image processing pipelines. Thereupon, we present a simple yet
effective, learning-free surface normal estimation strategy for both complete and incomplete depth maps. The
proposed method takes advantage of scale-space. While the finest scale is used for the initial estimations, the
missing surface normals, which cannot be estimated properly are filled from the coarser scales of the pyramid.
The same procedure is applied for incomplete depth maps with a slight modification, where we guide the
algorithm using the gradient information obtained from the shading image of the scene, which has a geometric
relationship with the surface normals. In order to test our method for the incomplete depth maps scenario, we
augmented the MIT-Berkeley Intrinsic Images dataset by creating two different sets, namely, easy and hard.
According to the experiments, the proposed algorithm achieves competitive results on datasets containing both
single objects and realistic scenes.
1 INTRODUCTION
Surface normal vectors are local descriptors that can
help us to obtain the shape of an object, light di-
rection, and curvature (Ebner, 2007). Many studies
make use of surface normals as auxiliary informa-
tion in computer vision applications such as 3D object
recognition, surface reconstruction, and depth com-
pletion (Harms et al., 2014; Zhang and Funkhouser,
2018; Fan et al., 2021). Since surface normals are uti-
lized in several pipelines, their efficient estimation is
of critical importance.
Surface normals can be extracted from depth
maps/disparity images and 3D point clouds (Mitra and
Nguyen, 2003; Zhang and Funkhouser, 2018). Point
clouds are usually unorganized and distorted by noise,
which causes the requirement of computationally ex-
pensive procedures and complicates the extraction of
features (Awwad et al., 2010; Fan et al., 2021). Thus,
depth maps and disparity images have gained attention
for the task of surface normal estimation, since they
contain structured sensor data. While the close geo-
metric relationship between depth maps and surface
normals is a very useful feature, possible missing in-
formation in depth maps is a challenge, which should
be considered during algorithm design.
Over the years, several surface normal estima-
tion methods have been proposed, which utilize var-
ious approaches (Klasing et al., 2009; Zeng et al.,
2019). For instance, several averaging-based algo-
rithms, such as the area-weighted and angle-weighted
methods, have been introduced, which take advantage
of the local neighbourhood to compute the surface
normals (Klasing et al., 2009). Also, other statistics-
and optimization-based techniques have been pro-
posed to estimate the surface normals. The SIRFS al-
gorithm aims at recovering the reflectance, shading,
illumination, surface normals, depth, and shape from
a single masked image (Barron and Malik, 2014).
SIRFS relies on priors and formulates an optimization
problem to recover the intrinsic images. The 3F2N
method applies three filters namely, a horizontal and
a vertical gradient filter, and a mean/median filter, to
structured range sensor data to estimate the surface
normals (Fan et al., 2021). 3F2N utilizes the camera
focal lengths and image principal point as priors.
While traditional methods are still widely used
and new statistical techniques are introduced, with the
improvements in deep learning, convolutional neural
networks-based algorithms have also been developed
for surface normal estimation purposes. However, in
several studies it is discussed that deep learning tech-
Ulucan, D., Ulucan, O. and Ebner, M.
Multi-Scale Surface Normal Estimation from Depth Maps.
DOI: 10.5220/0011968300003497
In Proceedings of the 3rd International Conference on Image Processing and Vision Engineering (IMPROVE 2023), pages 47-56
ISBN: 978-989-758-642-2; ISSN: 2795-4943
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
47

niques require a high amount of unbiased data to out-
put accurate results and to find the optimal parame-
ters for the network (Fan et al., 2021; Ulucan et al.,
2022b; Ulucan et al., 2022c). In the field of surface
normal estimation the most commonly used datasets
are collected via using Kinect (Izadi et al., 2011; Sil-
berman et al., 2012; Kwon et al., 2015), where ground
truth depth information depends on the camera sensor.
These ground truth depths are usually incomplete, i.e.
several regions in the depth map do not contain any
measurements. These areas are later filled by using
various techniques (Zhang and Funkhouser, 2018).
Thus, the ground truth information relies both on the
sensor quality and the method used to fill the missing
regions. Therefore, learning-based surface normal es-
timation algorithms can be easily biased, which might
be one of the reasons why they still perform poorer
than desired (Li et al., 2015; Bansal et al., 2016; Fan
et al., 2021).
Although numerous methods have been intro-
duced for surface normal estimation, as tasks such as
3D shape recovery gain more attention, the need of
estimating surface normals accurately becomes more
significant. Thereupon, we propose a simple yet ef-
fective learning-free method, which estimates surface
normals from both complete and incomplete depth
maps. For the latter, we do not fill the missing depth
information but slightly modify our algorithm, by tak-
ing into account the gradient information obtained
from the shading element of the scene. Our method
depends on computations in scale-space, whose effec-
tiveness has been exploited in several applications re-
lated to depth map and surface normal vectors esti-
mation (Ioannou et al., 2012; Saracchini et al., 2012;
Eigen and Fergus, 2015; Zeng et al., 2019; Zhou et al.,
2020; Li et al., 2022; Hsu et al., 2022). Different than
the existing algorithms utilizing scale-space for sur-
face normal estimation, we introduce a method that
does not perform any complex computations or makes
use of neural networks, which require a huge amount
of data.
Our contributions can be summarized as follows;
• We introduce a simple yet effective learning-
free surface normal estimation algorithm in scale-
space, which has only a single parameter.
• We further augment the MIT-Berkeley Intrinsic
Images dataset (Barron and Malik, 2014) for sur-
face normal estimations from incomplete depth
maps.
The paper is organized as follows. In Sec. 2 we
introduce the proposed method. In Sec. 3 we present
the experimental outcomes and discuss the results. In
Sec. 4 we conclude our work with a brief summary.
2 PROPOSED METHOD
We present a simple yet effective algorithm that takes
a depth map as input and estimates the surface normal
vectors. Our algorithm performs normal vector esti-
mation for both complete and incomplete depth maps,
while for the latter only a slight modification is re-
quired. In the following, we explain the surface nor-
mal estimation procedure for both complete and in-
complete depth maps.
2.1 Complete Depth Maps
The surface normal estimation is performed in Gaus-
sian scale-space, which allows us to respect features
such as fine details, sharp edges, and to deal with miss-
ing pixels in depth maps. The number of levels in
scale-space is determined automatically based on the
image resolution. As we move up in scale-space the
local information degrades. Thus, to preserve local
information during surface normal computations, the
highest levels in the Gaussian pyramid are discarded.
It is experimentally determined that using half of the
number of possible levels that can be reached in a
pyramid enables us to preserve locality while avoid-
ing high computational costs.
We compute the surface normal vectors based on
the classical averaging method (Gouraud, 1971) by
making slight modifications. Let us assume that we
have a set of 𝑑 points 𝑃 = {𝑝
1
, 𝑝
2
, ...,𝑝
𝑑
}, 𝑝
𝑖
∈ ℝ
2
,
which form a depth map. We compute the surface nor-
mal vector 𝐧
𝑖
= [𝑛
𝑖
𝑥
𝑛
𝑖
𝑦
𝑛
𝑖
𝑧
] for a selected pixel 𝑝
𝑖
, by
making use of 𝑘 triangles formed by the spatially clos-
est neighbouring pixels 𝑄 = {𝑞
𝑖
1
, 𝑞
𝑖
2
, ..., 𝑞
𝑖
𝑘
}, 𝑞
𝑖
𝑘
∈ 𝑃 ,
𝑞
𝑖
𝑘
≠ 𝑝
𝑖
, as follows;
𝐧
𝑖
=
1
𝑘
𝑘
𝑗=1
[𝑞
𝑖
𝑗
− 𝑝
𝑖
] × [𝑞
𝑖
𝑗+1
− 𝑝
𝑖
] (1)
where, 𝑞
𝑖
𝑗+1
is the neighbour in the counter-clockwise
direction of 𝑞
𝑖
𝑗
, and × represents the cross-product op-
eration.
While we generally use 4 triangles to compute the
surface normal for a pixel 𝑝
𝑖
, 𝑘 may decrease when the
estimations are carried out on the borders of the depth
map, and when not all elements of 𝑄 are informative.
After 𝐧
𝐢
is computed it is normalized by its Frobenius
norm 𝐧
𝑖
= 𝐧
𝑖
∕𝐧
𝑖
.
When estimating the surface normals it is impor-
tant to respect edges and sharp depth changes. The
abrupt change in depth can cause ambiguities in such
regions since the information from two or more differ-
ent manifolds might be taken into account (Cao et al.,
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
48

Figure 1: The estimated surface normal vectors at different
scales are presented, where the black regions correspond to
areas that do not satisfy the threshold.
Figure 2: Illustration of finding surface normals at coarser
scales. The regions encircled by red, pink, and gray are filled
by using the estimations in the second, third, and fourth
scales, respectively.
Figure 3: Estimation of surface normal vectors from a com-
plete depth map. (Left-to-right) The scene, depth map,
ground truth surface normals, and estimated surface nor-
mals.
2018). Therefore, computing the surface normal vec-
tors in each scale 𝑠 only in regions where the depth in-
formation changes slightly allows us to avoid any am-
biguity, i.e. to have smooth transitions without dam-
aging information, at edges and areas with consider-
able depth changes. We compute the surface normal
vector 𝐧
𝐢
for a pixel 𝑝
𝑖
at any scale only if the change
in the depth information is below a certain threshold
and does not equal zero (Fig 1). We determined that
a threshold of 0.9 is effective for the first scale, while
at each coarser scale, the threshold should become 4
times larger (analysis is given in Appendix A). This as-
sumption can be intuitively explained by the fact that
at each scale the depth map is down-sampled so that 4
pixels are represented by 1 pixel in the next scale.
After the surface normals are computed at each
scale, we need to find the corresponding values of the
surface normal vectors, which could not be estimated
at the finest scale. For each normal vector, which
could not be computed in the first scale we look for
the corresponding value in a scale, where information
is present. An example of finding values at coarser
scales is illustrated in Fig.2. For instance, while the
regions enclosed with a red circle are filled by using
the estimations in the second scale, the areas encir-
cled by gray are filled by taking advantage of the es-
timations in the coarsest scale. To handle rare cases,
where at a certain pixel 𝑝
𝑖
the surface normal cannot
be computed in any scale, an averaging operation is
performed in the pixels 3 × 3 neighborhood, and the
computed vector is assumed to be 𝐧
𝑖
.
Lastly, a Gaussian smoothing operation with a
small standard deviation of 0.45 is applied. An ex-
ample of estimating normals via our method is shown
in Fig. 3
2.2 Incomplete Depth Maps
While depth maps are used as auxiliary data in many
computer vision tasks such as intrinsic image decom-
position, and computational color constancy, they may
suffer from missing pixels (Ebner and Hansen, 2013).
These pixels can be filled by inpainting methods, how-
ever, we observed that surface normals obtained by us-
ing inpainted depth maps result in outputs with lower
accuracy (analysis is given in Appendix B). Therefore,
we compute surface normals from incomplete depth
maps by using the natural advantage of scale-space.
We compute the surface normals at each scale in
the same way we compute them for complete depth
maps but without considering the regions with miss-
ing depth values (Fig. 4). We estimate the surface
normals, which lie within a region where no depth
information is present in the coarser scales by using
the relationship between the surface normals and the
shading element of the scene since the shading and
surface normals have a direct relationship as follows;
𝑖
= 𝜙
𝑖
⋅ 𝐧
𝑖
, 𝐋
𝑖
(2)
where 𝜙 is the light intensity, 𝐋 is the light direction
vector, 𝑖 is the index of pixel 𝑝, and .represents the
inner product (Jeon et al., 2014).
We use the baseline approach to obtain the shad-
ing image from the input scene (Bonneel et al., 2017).
According to the baseline approach, the square root of
the direct average of channels, i.e. grayscale illumina-
tion, is assumed to be the shading element and can be
computed as follows;
=
(𝑟 + 𝑔 + 𝑏)∕3 (3)
where, 𝑟, 𝑔, 𝑏 are the red, green, and blue color chan-
nels, respectively.
Multi-Scale Surface Normal Estimation from Depth Maps
49

Figure 4: The estimated surface normal vectors for an in-
complete depth map. The white regions inside the object
demonstrate the areas where depth information is missing.
Table 1: Chosen neighbors according to the gradient direc-
tion. (𝑥, 𝑦) is the spatial location of a pixel of interest 𝑝
𝑖
.
Angles in degrees Neighbour locations
[0
◦
, 45
◦
) [180
◦
, 225
◦
) (𝑥 − 1, 𝑦 + 1) (𝑥 + 1, 𝑦 − 1)
[45
◦
, 90
◦
) [225
◦
, 270
◦
) (𝑥 − 1, 𝑦) (𝑥 + 1, 𝑦)
[90
◦
, 135
◦
) [270
◦
, 315
◦
) (𝑥 − 1, 𝑦 − 1) (𝑥 + 1, 𝑦 + 1)
[135
◦
, 180
◦
) [315
◦
, 360
◦
] (𝑥, 𝑦 − 1) (𝑥, 𝑦 +1)
Figure 5: Estimation of normals from an easy case of in-
complete depth maps. (Left-to-right) Baseline shading, in-
complete depth map, ground truth, and estimated normals.
We extract the gradient directions from the shad-
ing element by using the gradient angle, to guide the
surface normal estimation procedure for incomplete
depth maps. In a 3 × 3 neighborhood, the two neigh-
bors in the same gradient direction are averaged to fill
the missing surface normals (Table 1). In case only
one informative neighbor is present it is directly used
as the surface normal estimate. When no information
is present in both neighbors, estimation is performed
in other scales. Afterwards, the same procedure used
for complete depth maps is applied. Subsequently, a
small Gaussian smoothing operation with a standard
deviation of 0.8 is applied. An example of estimating
the normals from an incomplete depth map is given in
Fig.5.
It is also worth mentioning here that instead of us-
ing a gradient-guided approach, inpainting methods
could also be preferred. However, during our exper-
iments, we observed that such methods result in less
satisfying outcomes as presented in Appendix B.
3 EXPERIMENTS AND
DISCUSSION
We compared the performance of the proposed
method with the following geometry-based
algorithms; baseline, bicubic interpolation,
angle-weighted averaging (Klasing et al., 2009),
triangle-weighted averaging (Klasing et al., 2009),
SIRFS (Barron and Malik, 2014), and 3F2N (Fan
et al., 2021), which are briefly explained in Sec. 1
(for details of the baseline, bicubic interpolation,
angle-weighted averaging, and triangle-weighted
averaging methods please refer to Appendix C). All
algorithms are used in their default settings without
any modification or optimization. It is worth men-
tioning here that for the 3F2N method fixed camera
parameters are used since the MIT-Berkeley Intrinsic
Images dataset does not provide camera specifics for
the scenes.
We carried out the statistical comparisons for com-
plete depth maps on the MIT-Berkeley Intrinsic Im-
ages dataset (Barron and Malik, 2014), while we per-
formed analyses for incomplete depth maps on the
augmented version of the MIT-Berkeley Intrinsic Im-
ages dataset. Furthermore, we provide visual compar-
isons on the New Tsukuba Dataset, since it does not
contain ground truth surface normals (Martull et al.,
2012). We conducted all the experiments by using an
Intel i7 CPU @2.7 GHz Quad-Core 16GB RAM ma-
chine.
In the remainder of this section, we briefly explain
the datasets, evaluation metrics, and discuss the out-
comes.
3.1 Datasets
MIT-Berkeley Intrinsic Images Dataset. Surface
normal estimation is a widely studied research field,
yet quantitatively evaluating the performance of the
algorithms is challenging, due to the lack of ground
truth information in most of the existing datasets (Ulu-
can et al., 2022a). In order to benchmark our ap-
proach statistically, we used the MIT-Berkeley Intrin-
sic Images dataset (Barron and Malik, 2014), which
is an extended version of the MIT Intrinsic Images
dataset (Grosse et al., 2009). The MIT-Berkeley In-
trinsic Images dataset contains 20 different scenes,
which contain a single masked object. For each scene,
the depth map and ground truth surface normals are
provided, which makes the MIT-Berkeley Intrinsic
Images dataset suitable for our experiments (Fig. 6).
Augmented MIT-Berkeley Intrinsic Images
Dataset. In order to analyze the performance of
the proposed approach in the case of incomplete
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
50
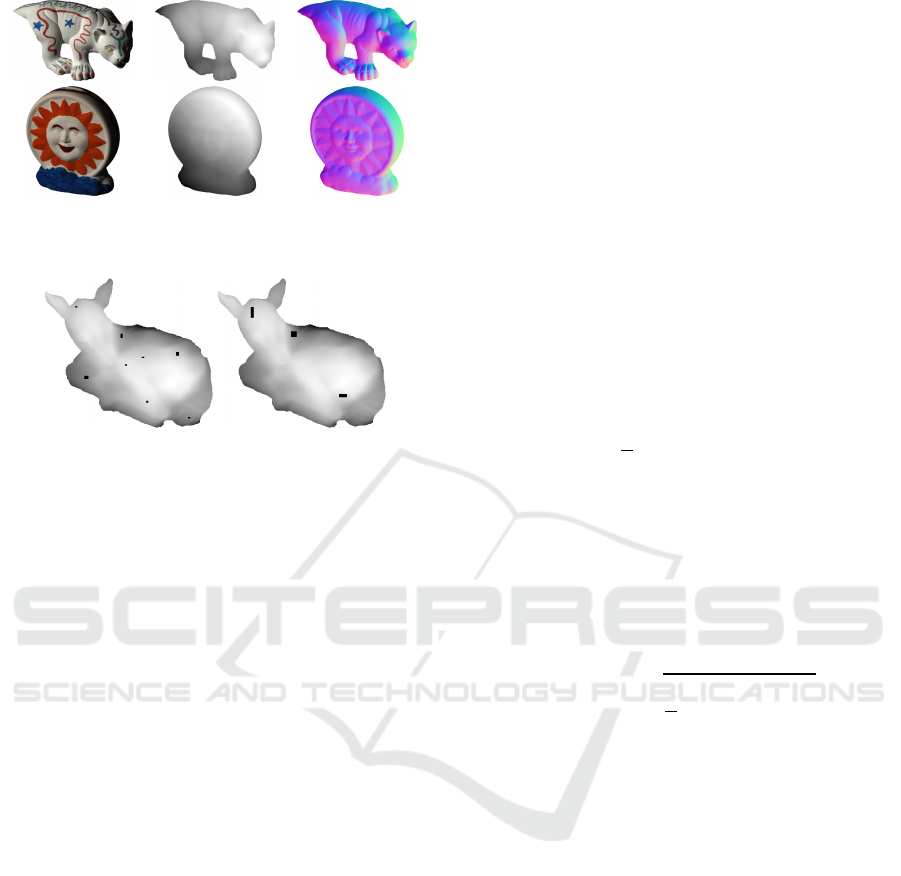
Figure 6: Examples from the MIT-Berkeley Intrinsic Im-
ages dataset. (Left-to-right) The scene, depth map, and the
surface normals.
Figure 7: The augmented version of the MIT-Berkeley In-
trinsic Images dataset with various difficulties. (Left-to-
right) Easy and hard cases.
depth maps, we modify the depth maps of the MIT-
Berkeley Intrinsic Images dataset by creating 2 sets,
namely, easy, and hard, where several areas of the
depth maps are randomly removed as shown in Fig. 7.
For the easy case, small-scale regions of the depth map
are removed, while for the hard case, large regions
containing up to 3000 pixels are deleted.
New Tsukuba Dataset. To present the perfor-
mance of our algorithm in scenes similar to the real
world, we also provide outcomes for scenes from the
New Tsukuba Dataset (Martull et al., 2012). This
dataset is rendered using various computer graphics
techniques and is composed of video sequences. The
dataset contains stereo pairs with ground truth depth
maps. Since ground truth surface normals are not
present in this dataset, we only provide visual com-
parisons. Furthermore, we are providing a video se-
quence, where we demonstrate our surface normal es-
timations for each frame of the New Tsukuba Dataset.
The video will be provided on the first author’s web-
site upon publication.
3.2 Evaluation Metrics
Not only the datasets but also the evaluation metrics
have significant importance in the field of intrinsic im-
age decomposition (Barron and Malik, 2014). Since
the scores of all metrics may not coincide, many image
processing studies discuss that analyzing the perfor-
mance with multiple strategies is beneficial (Fouhey
et al., 2013; Bonneel et al., 2017; Karakaya et al.,
2022; Garces et al., 2022). Thereupon, in order to
statistically evaluate the algorithms, we used two dif-
ferent metrics, namely, geodesic distance, and root
mean square error. We report the minimum, maxi-
mum, mean, median, best 25%, and worst 25% of the
errors.
The geodesic distance is the length of the shortest
path between the points on the surfaces along the man-
ifold. Since geodesic distance is responsive to slight
topology changes and noise, it is also independent of
the viewing angle of the observer (Pizer and Marron,
2017; Antensteiner et al., 2018). Thus, it is widely
used as a quality metric in many surface normal es-
timation studies. A lower geodesic distance between
the ground truth and the estimation means greater sim-
ilarity. The geodesic distance 𝐺𝐷𝐼𝑆 between the
ground truth 𝐧
𝑔𝑡
and the estimated surface normals
𝐧
𝑒𝑠𝑡
can be calculated as follows;
𝐺𝐷𝐼𝑆 =
1
𝑑
𝑑
𝑖=1
𝑐𝑜𝑠
−1
𝐧
𝑔𝑡
𝑖
⋅ 𝐧
𝑒𝑠𝑡
𝑖
. (4)
Root mean square error is another commonly used
evaluation method in the field of intrinsic image de-
composition (Fouhey et al., 2013). As in the geodesic
distance, a lower value of the root mean square error
indicates better results. The root mean square error
(𝑅𝑀𝑆𝐸) between the 𝐧
𝑔𝑡
and 𝐧
𝑒𝑠𝑡
can be computed
as follows;
𝑅𝑀𝑆𝐸 =
1
𝑑
𝑑
𝑖=1
𝐧
𝑔𝑡
𝑖
− 𝐧
𝑒𝑠𝑡
𝑖
2
. (5)
3.3 Discussion
The statistical outcomes for the complete depth maps
are provided in Table 2. Our proposed algorithm out-
performs all the methods in each metric. The median
of both 𝐺𝐷𝐼𝑆 and 𝑅𝑀𝑆𝐸 are lower than their mean,
which indicates that our algorithm tends to produce re-
sults closer to the best outcomes rather than the worst
ones. We present the visual comparison on the MIT-
Berkeley Intrinsic Images dataset in Fig. 8. It can be
seen that the fine details are preserved well even at the
edges.
While the performance gap between our method
and the existing averaging techniques may seem low
in terms of 𝐺𝐷𝐼𝑆, the advantage of our algorithm is
easily seen in Fig. 9, where complex scenes are used
instead of a single masked object. While the angle-
weighted averaging method cannot estimate surface
normals at flat regions, our algorithm performs well
in such areas.
Multi-Scale Surface Normal Estimation from Depth Maps
51
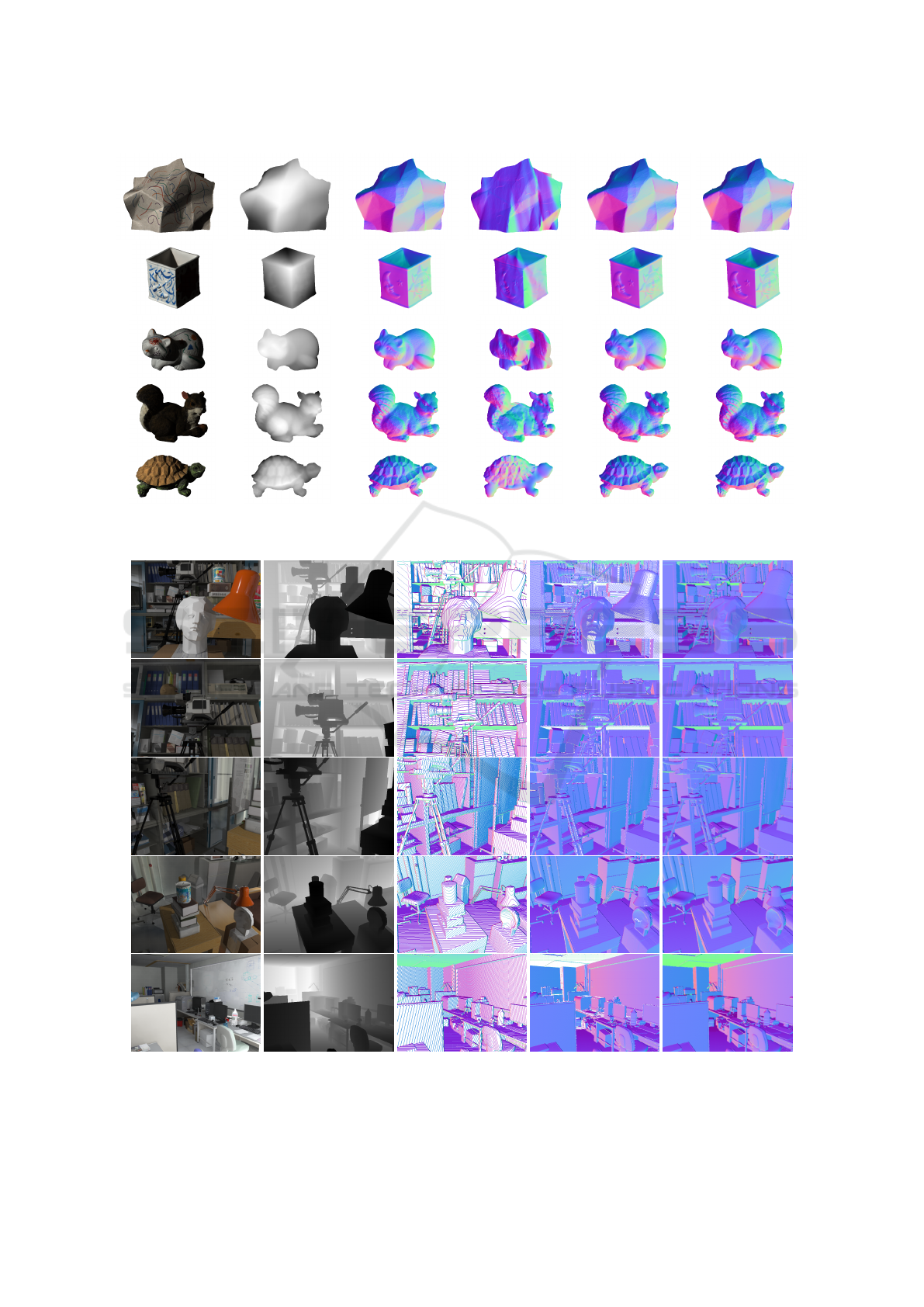
Figure 8: Visual comparison on the MIT-Berkeley Intrinsic Images dataset. (Left-to-right) The scene, depth map, ground
truth, and estimations of SIRFS, Area-Weighted, and proposed method.
Figure 9: Visual comparison on the New Tsukuba Dataset. (Left-to-right) The scene, depth map, and estimations of Angle-
Weighted, proposed without scale-space and proposed with scale-space. The white regions present the pixels, where surface
normals could not be computed. Note here that a different threshold is used according to the range of this dataset.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
52
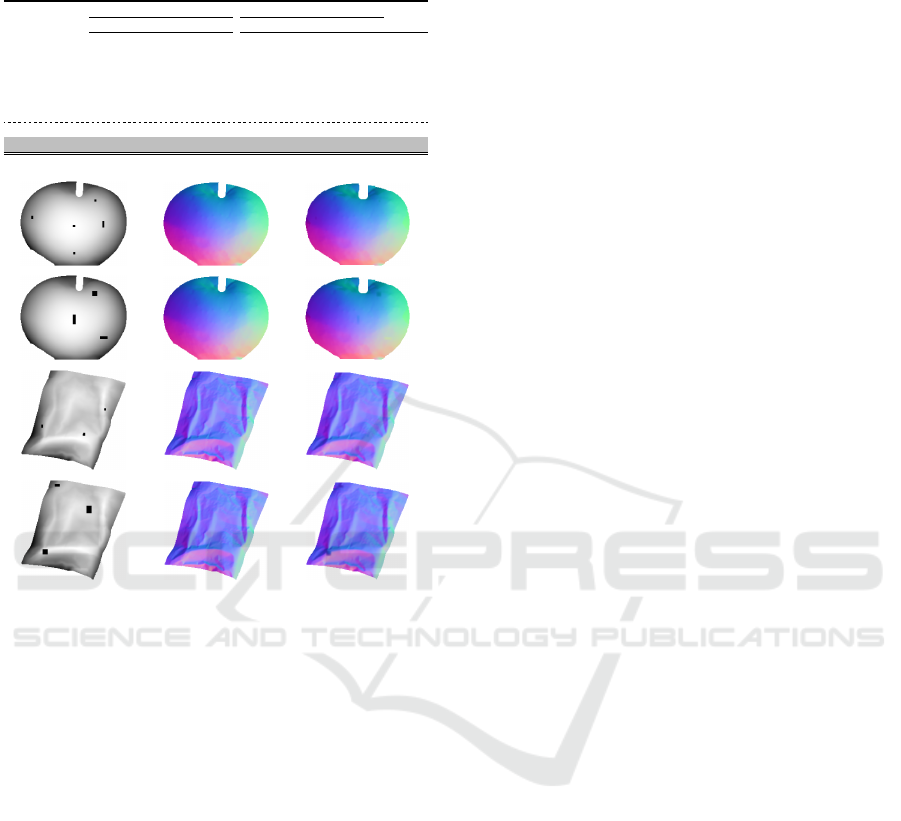
Table 2: Statistical results on MIT-Berkeley Intrinsic Im-
ages dataset. Best scores are highlighted.
GDIS RMSE Run Time
Min. Mean Med. B.25% W.25% Max. Min. Mean Med. B.25% W.25% Max.
Baseline 0.996 0.999 0.999 0.998 1.000 1.000 0.783 0.968 0.953 0.854 1.094 1.270 0.059
Angle-Weighted 0.095 0.163 0.155 0.112 0.223 0.262 0.051 0.063 0.062 0.053 0.073 0 .083 3.942
Area-Weighted 0.095 0.163 0.155 0.111 0.223 0.262 0.046 0.056 0.055 0.048 0.066 0.073 3.813
Bicubic Interpolation 0.148 0.256 0.246 0.172 0.359 0.504 0.189 0.342 0.337 0.238 0.447 0.516 𝟎.𝟎𝟏𝟐
SIRFS 0.145 0.256 0.242 0.166 0.366 0.438 0.130 0.246 0.241 0.164 0.324 0.333 189.34
3F2N 0.218 0.379 0.377 0.271 0.494 0.563 0.400 0.490 0.500 0.414 0.572 0.626 0.040
Proposed without scale-space 0.096 0.163 0.155 0.112 0.223 0.263 0.046 0.056 0.055 0.048 0.066 0.073 0.762
Proposed with scale-space 𝟎.𝟎𝟗𝟏 𝟎.𝟏𝟔𝟎 𝟎.𝟏𝟓𝟑 𝟎.𝟏𝟎𝟖 𝟎.𝟐𝟐𝟎 𝟎.𝟐𝟓𝟗 𝟎.𝟎𝟑𝟕 𝟎.𝟎𝟒𝟗 𝟎.𝟎𝟒𝟖 𝟎.𝟎𝟑𝟗 𝟎.𝟎𝟔𝟏 𝟎.𝟎𝟔𝟒 1.422
Figure 10: Estimations from incomplete depth maps. (Left-
to-right) The depth map, ground truth surface normals, and
estimations of the proposed method.
We also compared our algorithm’s performance
without using the scale-space and directly applying
our computations in the finest scale. For this com-
parison, it is important to mention that even though
the statistical results especially in terms of 𝐺𝐷𝐼𝑆 do
not vary significantly, the advantage of adopting scale-
space is clearly demonstrated in Fig. 9. When com-
plex scenes are of interest rather than a single masked
object, flat regions cannot be filled and discontinuity at
edges is observed when surface normal computations
are not carried out in scale-space.
Furthermore, in Fig. 10 we provide visual out-
comes for the estimations obtained from incomplete
depth maps. Since the algorithms in Table 2 expect
complete depth maps as input it would not be fair
to investigate their performance on incomplete depth
maps, thus we only provide visual analysis for incom-
plete depth maps. Our approach is able to make accu-
rate estimations for both the easy and hard sets in the
dataset.
4 CONCLUSION
We present a simple yet effective surface normal es-
timation strategy. Our method estimates surface nor-
mal vectors from both complete and incomplete depth
maps by taking advantage of scale-space. For com-
plete depth maps, while the initial estimations are car-
ried out in the finest scale of the pyramid, the regions
that cannot be estimated correctly in the first scale are
filled from the coarser scales. For incomplete depth
maps, we follow the same procedure as in the com-
plete depth maps but with slight modifications. To fill
missing regions in incomplete depth maps, we are tak-
ing advantage of the relationship between the surface
normals and the shading component of the scenes. We
compute the surface normals by guiding our algorithm
with the gradient directions obtained from the shad-
ing element. We benchmarked our method on the
well-known MIT-Berkeley Intrinsic Images dataset
and the New Tsukuba Dataset. Moreover, for incom-
plete depth maps, we modified the MIT-Berkeley In-
trinsic Images dataset. According to the experiments,
our approach can estimate surface normals effectively
for both simple and complex scenes.
.
REFERENCES
Antensteiner, D., Štolc, S., and Pock, T. (2018). A re-
view of depth and normal fusion algorithms. Sensors,
18(2):431.
Awwad, T. M., Zhu, Q., Du, Z., and Zhang, Y. (2010). An
improved segmentation approach for planar surfaces
from unstructured 3d point clouds. Photogrammetric
Rec., 25:5–23.
Bansal, A., Russell, B., and Gupta, A. (2016). Marr re-
visited: 2D-3D alignment via surface normal predic-
tion. In Conf. Comput. Vision Pattern Recognit., pages
5965–5974, Las Vegas, NV, USA. IEEE.
Barron, J. T. and Malik, J. (2014). Shape, illumination, and
reflectance from shading. IEEE Trans. Pattern Anal.
Mach. Intell., 37(8):1670–1687.
Bonneel, N., Kovacs, B., Paris, S., and Bala, K. (2017).
Intrinsic decompositions for image editing. Comput.
Graph. Forum, 36:593–609.
Bornemann, F. and März, T. (2007). Fast image inpainting
based on coherence transport. J. Math. Imag. Vision,
28:259–278.
Cao, J., Chen, H., Zhang, J., Li, Y., Liu, X., and Zou, C.
(2018). Normal estimation via shifted neighborhood
for point cloud. J. Comput. Appl. Math., 329:57–67.
Criminisi, A., Pérez, P., and Toyama, K. (2004). Region
filling and object removal by exemplar-based image in-
painting. IEEE Trans. Image Process., 13:1200–1212.
Ebner, M. (2007). Color Constancy, 1st ed. Wiley Publish-
ing, ISBN: 0470058299.
Multi-Scale Surface Normal Estimation from Depth Maps
53

Ebner, M. and Hansen, J. (2013). Depth map color con-
stancy. Bio-Algorithms and Med-Systems, 9(4):167–
177.
Eigen, D. and Fergus, R. (2015). Predicting depth, surface
normals and semantic labels with a common multi-
scale convolutional architecture. In Int. Conf. Comput.
Vision, Santiago, Chile. IEEE.
Fan, R., Wang, H., Xue, B., Huang, H., Wang, Y., Liu, M.,
and Pitas, I. (2021). Three-filters-to-normal: An ac-
curate and ultrafast surface normal estimator. IEEE
Robot. Automat. Letters, 6(3):5405–5412.
Fouhey, D. F., Gupta, A., and Hebert, M. (2013). Data-
driven 3D primitives for single image understanding.
In Int. Conf. Comput. Vision, pages 3392–3399, Syd-
ney, NSW, Australia. IEEE.
Garces, E., Rodriguez-Pardo, C., Casas, D., and Lopez-
Moreno, J. (2022). A survey on intrinsic images: Delv-
ing deep into lambert and beyond. Int. J. Comput. Vi-
sion, 130:836–868.
Gouraud, H. (1971). Continuous shading of curved surfaces.
IEEE Trans. Computers, 100(6):623–629.
Grosse, R., Johnson, M. K., Adelson, E. H., and Free-
man, W. T. (2009). Ground truth dataset and base-
line evaluations for intrinsic image algorithms. In
Int. Conf. Comput. Vision, pages 2335–2342, Kyoto,
Japan. IEEE.
Harms, H., Beck, J., Ziegler, J., and Stiller, C. (2014). Ac-
curacy analysis of surface normal reconstruction in
stereo vision. In Intell. Vehicles Symp. Proc., pages
730–736, Dearborn, MI, USA. IEEE.
Hsu, H., Su, H.-T., Yeh, J.-F., Chung, C.-M., and Hsu, W. H.
(2022). SeqDNet: Improving missing value by se-
quential depth network. In Int. Conf. Image Process.,
pages 1826–1830, Bordeaux, France. IEEE.
Ioannou, Y., Taati, B., Harrap, R., and Greenspan, M.
(2012). Difference of normals as a multi-scale opera-
tor in unorganized point clouds. In Int. Conf. 3D Imag.
Model. Process. Visualization Transmiss., pages 501–
508, Zurich, Switzerland. IEEE.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., and Fitzgibbon, A. (2011). KinectFu-
sion: real-time 3D reconstruction and interaction us-
ing a moving depth camera. In Proc. Annu. ACM
Symp. User Interface Softw. Technol., pages 559–568,
Santa Barbara, CA, USA. ACM.
Jeon, J., Cho, S., Tong, X., and Lee, S. (2014). Intrinsic im-
age decomposition using structure-texture separation
and surface normals. In Eur. Conf. Comput. Vision,
pages 218–233, Zurich, Switzerland. Springer.
Karakaya, D., Ulucan, O., and Turkan, M. (2022). Image de-
clipping: Saturation correction in single images. Digit.
Signal Process., 127:103537.
Klasing, K., Althoff, D., Wollherr, D., and Buss, M. (2009).
Comparison of surface normal estimation methods for
range sensing applications. In Int. Conf. Robot. Au-
tomat., pages 3206–3211, Kobe, Japan. IEEE.
Kwon, H., Tai, Y.-W., and Lin, S. (2015). Data-driven depth
map refinement via multi-scale sparse representation.
In Conf. Comput. Vision Pattern Recognit., pages 159–
167, Boston, MA, USA. IEEE.
Li, B., Shen, C., Dai, Y., Van Den Hengel, A., and He, M.
(2015). Depth and surface normal estimation from
monocular images using regression on deep features
and hierarchical CRFs. In Conf. Comput. Vision Pat-
tern Recognit., pages 1119–1127, Boston, MA, USA.
IEEE.
Li, K., Zhao, M., Wu, H., Yan, D.-M., Shen, Z., Wang,
F.-Y., and Xiong, G. (2022). GraphFit: Learn-
ing multi-scale graph-convolutional representation for
point cloud normal estimation. In Eur. Conf. Comput.
Vision, pages 651–667, Tel Aviv, Israel. Springer.
Martull, S., Peris, M., and Fukui, K. (2012). Realistic cg
stereo image dataset with ground truth disparity maps.
In ICPR Workshop TrakMark2012, volume 111, pages
117–118.
Mitra, N. J. and Nguyen, A. (2003). Estimating surface nor-
mals in noisy point cloud data. In Proc. Annu. Symp.
Comput. Geometry, pages 322–328, San Diego, CA,
USA. ACM.
Pizer, S. M. and Marron, J. (2017). Object statistics on
curved manifolds. In Statistical Shape Deformation
Anal., pages 137–164. Elsevier.
Saracchini, R. F. V., Stolfi, J., Leitão, H. C. G., Atkinson,
G. A., and Smith, M. L. (2012). A robust multi-
scale integration method to obtain the depth from gra-
dient maps. Comput. Vision Image Understanding,
116(8):882–895.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R.
(2012). Indoor segmentation and support inference
from RGBD images. In Eur. Conf. Comput. Vision,
pages 746–760, Florence, Italy. Springer.
Ulucan, D., Ulucan, O., and Ebner, M. (2022a). IID-
NORD: A comprehensive intrinsic image decomposi-
tion dataset. In Int. Conf. Image Process., pages 2831–
2835, Bordeaux, France. IEEE.
Ulucan, O., Ulucan, D., and Ebner, M. (2022b). BIO-CC:
Biologically inspired color constancy. In BMVC, Lon-
don, UK. BMVA Press.
Ulucan, O., Ulucan, D., and Ebner, M. (2022c). Color
constancy beyond standard illuminants. In Int. Conf.
Image Process., pages 2826–2830, Bordeaux, France.
IEEE.
Zeng, J., Tong, Y., Huang, Y., Yan, Q., Sun, W., Chen, J.,
and Wang, Y. (2019). Deep surface normal estima-
tion with hierarchical RGB-D fusion. In Conf. Com-
put. Vision Pattern Recognit., Long Beach, CA, USA.
IEEE/CVF.
Zhang, Y. and Funkhouser, T. (2018). Deep depth comple-
tion of a single rgb-d image. In Conf. Comput. Vision
Pattern Recognit., pages 175–185, Salt Lake City, UT,
USA. IEEE/CVF.
Zhou, J., Huang, H., Liu, B., and Liu, X. (2020). Nor-
mal estimation for 3d point clouds via local plane con-
straint and multi-scale selection. Comput. Aided Des.,
129:102916.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
54
APPENDIX A
Determination of the Threshold. As mentioned in
Sec. 2, the surface normal vectors are computed only
at pixels, where there is a small change in depth. In
other words, to compute the surface normals without
missing the fine details in the depth maps, a thresh-
old value that respects the slight distances between the
neighbouring pixels should be considered. Hence, we
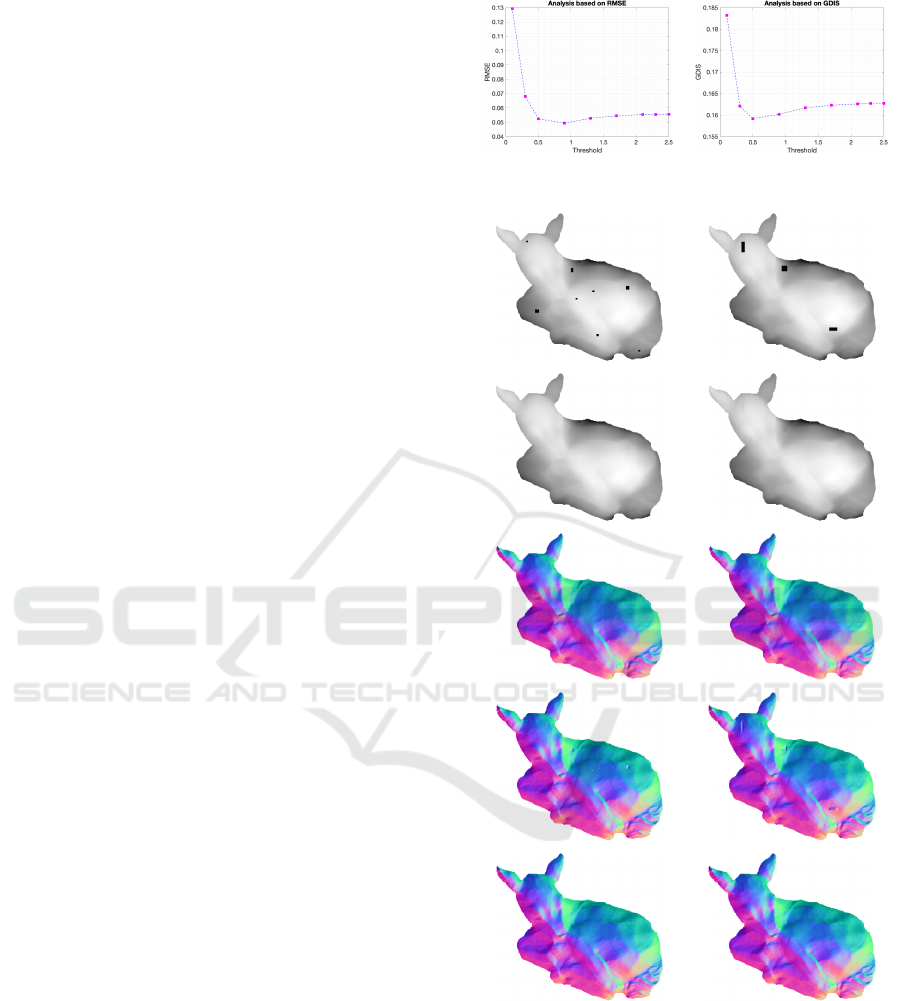
minutely investigate different threshold values with re-
spect to their RMSE, and GDIS scores over the en-
tire MIT-Berkeley Intrinsic Images dataset. When we
analyze the errors with respect to the threshold val-
ues (Fig. 11), it is observable that the difference be-
tween the errors does not significantly vary. We see
from Fig. 11 that the best-performing threshold is be-
tween 0.5 and 1.3. When we analyze the estimated
surface normals by considering each threshold, for
each given scene, we observed that the best outcomes
are obtained at the value of 0.9, while using a thresh-
old of 0.5 and 1.0 results in estimations with signifi-
cant errors in some of the scenes. Hence for the finest
scale, the threshold value is determined as 0.9. For the
coarser scales, since the image is down-sampled with
a ratio of 1∕4, we increase the threshold value 4 times
with respect to the threshold of the previous scale.
APPENDIX B
Analysis of Filling Missing Pixels in Depth Maps
before Estimating Surface Normals. We observed
during our experiments that in case the missing pixels
in the depth map are filled and the surface normals
are estimated from this data the outcomes have lower
accuracy than using our proposed algorithm for
incomplete depth maps. In Fig. 12 we present the
outcomes of our observation.
Comparison of Inpainting Methods and Gradient-
Guided Filling. For the incomplete depth maps, we
compare our method with its variations, where we
used inpainting methods instead of gradient-guided
filling. One of the methods we tested is the exemplar-
based inpainting method, which segments the image
into target and source regions, where the target
includes the pixels that need to be filled (Criminisi
et al., 2004). For a patch from the target region, the
most similar patch in the source area is found and
copied to the target patch. Another method we used
is the coherency-based inpainting approach, which
takes advantage of the coherent neighboring pixels,
whose values are known (Bornemann and März,
2007). The last method we compare our gradient-
Figure 11: Analysis on the determination of the threshold.
Figure 12: Analysis of filling missing pixels in depth maps.
(Top-to-bottom) Incomplete depth map, filled depth map,
ground truth normals, normals estimated from the filled
depth map, and estimation of the proposed method.
guided filling procedure to is the interpolation-based
approach, which performs interpolation by starting at
the boundary of a missing area (MATLAB regionfill).
In Fig. 13, we show examples from the easy and
hard sets. Our gradient-guided filling approach results
in more accurate outcomes than the other methods.
Multi-Scale Surface Normal Estimation from Depth Maps
55
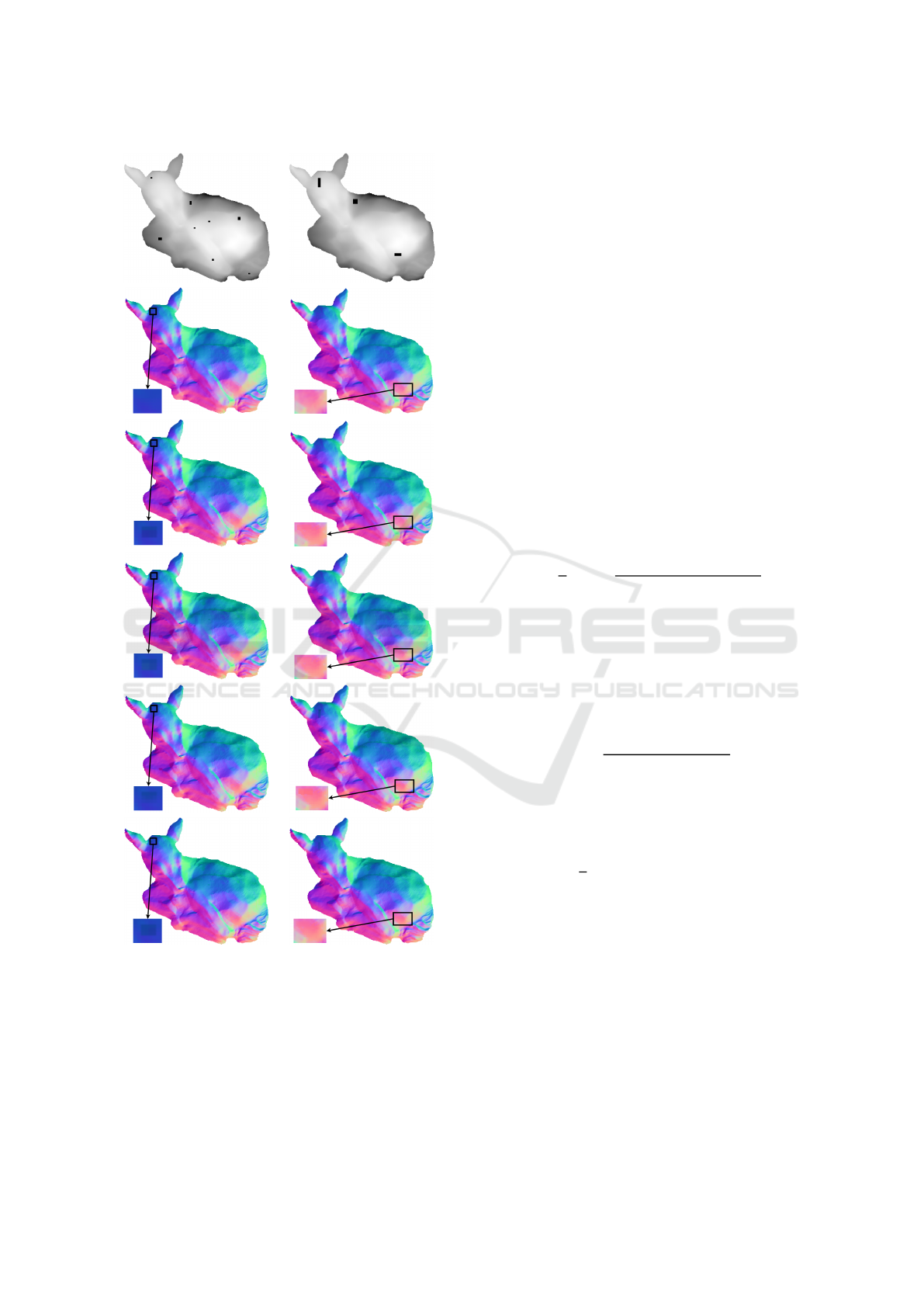
Figure 13: Comparison of inpainting methods. (Left-to-
right) Examples from the easy and hard set. (Top-to-bottom)
The depth map with missing pixels, ground truth surface
normal vectors, outcomes of the exemplar-based inpaint-
ing method (Criminisi et al., 2004), coherency-based in-
painting method (Bornemann and März, 2007), bicubic in-
terpolation, and proposed gradient-guided filling approach.
The missing regions are more accurately estimated with the
gradient-guided filling method.
APPENDIX C
Baseline Approach. The baseline approach computes
the surface normal vector for a pixel 𝑝
𝑖
from its con-
secutive neighbours in the horizontal and vertical di-
rections as follows;
𝐧
𝑖
𝑥
= 𝑝
(𝑖+1)
𝑥
− 𝑝
𝑖
𝑥
(6)
𝐧
𝑖
𝑦
= 𝑝
(𝑖+1)
𝑦
− 𝑝
𝑖
𝑦
(7)
𝐧
𝑖
𝑧
= −1. (8)
Bicubic Interpolation. The surface normals are
computed by applying bicubic interpolation on the
depth map, and using quadratic extrapolation on
the boundaries. After bicubic fit is carried out, the
diagonal vectors are obtained and crossed to estimate
surface normals (MATLAB surfnorm).
Averaging Methods. There are several varia-
tions of the averaging method. The general equation
for averaging can be represented as follows;
𝐧
𝑖
=
1
𝑘
𝑘
𝑗=1
𝑤
𝑖
𝑗
[ℎ
𝑖
𝑗
− 𝑝
𝑖
] × [ℎ
𝑖
𝑗+1
− 𝑝
𝑖
]
[ℎ
𝑖
𝑗
− 𝑝
𝑖
] × [ℎ
𝑖
𝑗+1
− 𝑝
𝑖
]
(9)
where, ℎ
𝑖
𝑗
and ℎ
𝑖
𝑗+1
are neighbours of 𝑝
𝑖
, 𝑤
𝑖
𝑗
is the
weight, which is 1 in the classical method.
For the angle-weighted averaging method 𝑤
𝑖
𝑗
is
the angle between the crossed vectors and can be com-
puted as follows;
𝑤
𝑖
𝑗
= 𝑐𝑜𝑠
−1
ℎ
𝑖
𝑗
− 𝑝
𝑖
, ℎ
𝑖
𝑗+1
− 𝑝
𝑖
ℎ
𝑖
𝑗
− 𝑝
𝑖
ℎ
𝑖
𝑗+1
− 𝑝
𝑖
. (10)
For the triangle-weighted averaging method, the
surface normal of each triangle is weighted according
to its area’s magnitude as follows;
𝑤
𝑖
𝑗
=
1
2
[ℎ
𝑖
𝑗
− 𝑝
𝑖
] × [ℎ
𝑖
𝑗+1
− 𝑝
𝑖
]
. (11)
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
56
