
On a Real Real-Time Wearable Human Activity Recognition System
Hui Liu
a
, Tingting Xue
b
and Tanja Schultz
c
Cognitive Systems Lab, University of Bremen, Germany
Keywords:
Human Activity Recognition, Real-Time Systems, Wearables, Biodevices, Biosignals, Digital Signal
Processing, Biosignal Processing, Machine Learning, Performance Analysis, Plug-and-Play.
Abstract:
Many human activity recognition (HAR) systems have the ultimate application scenarios in real-time, while
most literature has limited the HAR study to offline models. Some mentioned real-time or online applications,
but the investigation of implementing and evaluating a real-time HAR system was missing. With our years
of experience developing and demonstrating real-time HAR systems, we brief the implementation of offline
HAR models, including hardware specifications, software engineering, data collection, biosignal processing,
feature study, and human activity modeling, and then focus on the transition from offline to real-time models
for details of window length, overlap ratio, sensor/device selection, feature selection, graphical user interface
(GUI), and on-the-air functionality. We also indicate the evaluation of a real-time HAR system and put forward
tips to improve the performance of wearable-based HAR.
1 BACKGROUND
Human activity recognition (HAR) is increasingly be-
coming a hot research topic and a technology that as-
sists in all aspects of life. High-quality sensory obser-
vations applicable to recognizing users’ activities and
behaviors, including electrical, magnetic, mechani-
cal (kinetic), optical, acoustic, thermal, and chemi-
cal biosignals, are inseparable from sensors’ sophis-
ticated design and appropriate application (Liu et al.,
2023). Related research is emerging, which can be
divided into two main categories through the appli-
cation of sensing technologies — external sensing
and internal sensing (Lara and Labrador, 2012). The
latter is the object of this paper, which can provide
users with unrestricted movement volume and wear-
able daily application experience.
HAR for medical and rehabilitation analysis, be-
havior and habit understanding, or activity modeling
for game figures does not require real-time: a stable
offline system with a high accuracy rate for process-
ing stored biosignals is sufficient to meet the demand.
In contrast, device control and human-machine inter-
action scenarios mostly call for the implementation
of real-time HAR, such as game control, interactive
user interface, sports assistance, and abnormal motion
a
https://orcid.org/0000-0002-6850-9570
b
https://orcid.org/0000-0002-5815-7217
c
https://orcid.org/0000-0002-9809-7028
recognition, among others. The vast majority of wear-
able sensor-based HAR research papers explore of-
fline models. Few mentions, outlooks, or preliminar-
ily investigates the prospect of real-time applications.
It is worth pointing out that some research publica-
tions use the name real-time loosely or inaccurately;
Instead, their systems or approaches should be better
referred to as online systems.
A strictly defined real-time recognition program
must guarantee a response within specified time con-
straints, often referred to as “deadlines” (Ben-Ari,
2006). It controls an environment by receiving data,
processing them, and returning the results sufficiently
quickly to affect the environment at that time (Green-
berger, 1965). In the perspective of digital signal
processing (DSP) of real-time recognition systems,
the analyzed (input) and generated (output) samples
should be processed (or generated) continuously in
the time it takes to input and output the same set of
samples independent of the processing delay (Kuo
et al., 2013). Consider a simple quantitative exam-
ple; if an HAR system requires more than 1 sec-
ond to process, recognize, and respond to a 1-second
window/frame of recorded signals, the user will feel
the system’s recognition outputs slower and slower.
Thus, after a short duration, it becomes a “congested”
system that disrupts the real-time experience. If win-
dow overlapping, an often applied technology in HAR
for improving recognition accuracy, is taken into ac-
Liu, H., Xue, T. and Schultz, T.
On a Real Real-Time Wearable Human Activity Recognition System.
DOI: 10.5220/0011927700003414
In Proceedings of the 16th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2023) - Volume 5: HEALTHINF, pages 711-720
ISBN: 978-989-758-631-6; ISSN: 2184-4305
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
711

count, the processing time for each input required
for a real-time recognition system is even more de-
manding. Moreover, even though it is possible to pro-
vide more computation time by widening the window
length, thus satisfying real-time in terms of the def-
inition (without causing cumulative computation de-
lay), the immediacy of HAR related to the interactive
interface and device control does not tolerate a large
window size. Just imagine that a gamer performs the
“jump” activity to hit the question mark brick, and af-
ter two seconds, a crisp gold coin sounds.
We introduced our real-time HAR system with
its on-the-fly functionality at the beginning of 2019,
which the academic community highly recognized
(Liu and Schultz, 2019). In the following four years,
this system was invited to live demonstrations and in-
teractive presentations on over 50 academic and in-
dustrial occasions, and was invariably well-received
by the scholars and the engineers in attendance. From
these dozens of hours of live real-time show-how, we
have gradually validated the proposed approach’s le-
gitimacy, the implemented software interface’s practi-
cality, and the realized recognition system’s real-time
performance from the system running and the third-
party feedback. We gathered suggestions, directions
of interest, and other reflections from the scientific
and industrial communities. Given this, we share and
analyze all the technical details, design experiences,
and gained perspectives of our real-time HAR system
in this paper in order to provide reference to peer re-
searchers and to be further validated by them.
2 OFFLINE MODELS
In the context of a research project in collaboration
with industry, we integrated various wearable sensors
in a medical knee bandage and used them for HAR ex-
periments with the aim of providing a technological
aid for post-operative rehabilitation and protection.
Following the state-of-the-art HAR research pipeline
(Liu et al., 2022a), we started with the equipment and
setup study on the basis of the application scenarios.
2.1 Hardware Specifications: Devices,
Settings, Carrier, and Wearable
Sensor Integration
After testing different wearable devices, we ap-
plied biosignalsplux Researcher Kit
1
as the biosignal
recording device that provides expandable solutions
1
https://www.pluxbiosignals.com/products/researcher-
kit (accessed January 18, 2023)
of hot-swappable sensors and automatic synchroniza-
tion, since we need to place many kinds of sensors
at different body positions around the knee in our
HAR research under the framework of the collabo-
rative project.
Several preliminary in-house HAR research ef-
forts have validated the feasibility and stability of the
biosignalsplux hubs and their attached selectable sen-
sors, such as electromyography sensors (EMG), ac-
celerometers (ACC), and electrogoniometers (EMG)
in relevant research tasks from multiple perspectives
(Rebelo et al., 2013) (Palyaf
´
ari, 2015). In addition,
we have included in our series of follow-up acqui-
sition tasks (see Section 5) additional biomechanical
and bioacoustic sensors, i.e., gyroscopes (GYRO) and
microphones (MIC), which were produced specially
for us by the provider. The gyroscope has been proven
effective for HAR in the extensive literature (Ha and
Choi, 2016) (Barna et al., 2019), while indications in
the individual literature showed that the airborne mi-
crophone might be used to recognition workshop ac-
tivity (Lukowicz et al., 2004).
Each biosignalsplux hub can simultaneously ac-
quire up to 8 channels of signals from arbitrarily se-
lected sensors, with a maximum sampling rate of
1000 Hz and a maximum quantization level of 16 bits.
Three hub-channels are required for ACC and GYRO,
respectively; EGM is dual-channel; each bipolar
EMG, as well as the MIC, occupies one channel. For
the three acquisition periods we have performed so
far (Liu and Schultz, 2018) (Liu and Schultz, 2019)
(Liu et al., 2021a), two hubs (up to 16 channels) or
three hubs (up to 24 channels) were used, depending
on the number of sensors employed. The hubs can
be synchronized automatically via a signal synchro-
nization cable. Due to the data volume limitation of
Bluetooth real-time transmission, a sampling rate of
1000 Hz was adopted for four EMG sensors and one
airborne microphone, while other biomechanical sig-
nals, ACCs, GYROs, and the EGM, were sampled at
100 Hz and upsampled to align EMG.
With the support of our research project partners,
we applied Bauerfeind’s Genutrain model knee ban-
dage
2
as a carrier for wearable sensors (see Figure 1).
The detailed integration scheme is listed in Table 1.
2.2 Software Implementation and Data
Corpora
In order to expediently control multiple wireless de-
vices, stably acquire and archive multimodal biosig-
nals, and smoothly perform up to 24-dimensional
2
https://www.bauerfeind.de/de/produkte/bandagen/knie
/details/product/genutrain (accessed January 18, 2023)
WHC 2023 - Special Session on Wearable HealthCare
712

Figure 1: The Bauerfeind’s Genutrain model knee bandage.
Table 1: Sensor integration scheme with positions and mea-
sured muscles.
Sensor Placement/Muscle
ACC 1 (upper) Thigh, proximal ventral
ACC 2 (lower) Shank, distal ventral
GYRO 1 (upper) Thigh, proximal ventral
GYRO 2 (lower) Shank, distal ventral
EMG 1 (upper-front) Musculus vastus medialis
EMG 2 (lower-front) Musculus tibialis anterior
EMG 3 (upper-back) Musculus biceps femoris
EMG 4 (lower-back) Musculus gastrocnemius
EGM (lateral) Knee of the right leg
MIC (lateral) Knee of the right leg
real-time visualization in preparation for subsequent
real-time recognition systems, we did not use the
open-source acquisition software provided by the sen-
sor company, as many studies do; Instead, we utilized
the software development kit (SDK) and implemented
our software, Activity Signal Kit (ASK).
The ASK baseline software can connect to wear-
able biosignal recording devices automatically, en-
able multi-sensor data acquisition and archiving, ap-
ply protocol-for-pushbutton mechanism of practi-
cal segmentation and annotation, process multichan-
nel biosignals, extract features, and model human
activities with the iteration of training-recognition-
evaluation (Liu, 2021). A series of upgraded and ex-
panded versions of the baseline software, such as the
plug-and-play version (see Section 3.2), android mo-
bile version, and virtual reality version, have been de-
veloped on the foundation of the robust baseline soft-
ware with real-time HAR functionality (see Section
3.1).
By applying the developed software, three
datasets of human movements were gradually col-
lected and made public. The pilot dataset CSL17 (1
subject, 7 activities of daily living, 15 minutes) was
used for validating the software implementation and
the HAR research workflow (Liu and Schultz, 2018),
based on which the current stable real-time HAR sys-
tem runs stably. The advanced dataset CSL18 (4 sub-
jects, 18 activities of daily living and sports, 90 min-
utes) and the comprehensive dataset CSL-SHARE
(20 subjects, 22 types of activities of daily living
and sports, 691 minutes) were utilized successfully
for further offline HAR model research and will be
applied for the future person-independent real-time
HAR system (Liu and Schultz, 2019) (Liu et al.,
2021a).
The activities involved in these datasets include
standing, sitting, standing up, sitting down, one-leg
jumping, two-leg jumping, walking, walking in a
curve (left/right), walking upstairs, walking down-
stairs, left/right facing, lateral shuffling (left/right),
jogging, and V-cutting (left/right).
A human activity dataset of this size can no longer
be handled by trivial means and call for data mining,
machine learning, and data analysis (Weiner et al.,
2017) (see Section 2.3).
2.3 Biosignal Processing,
Feature-Related Research and
Activity Modeling
Several digital signal processing (DSP) tasks occur in
the early stages of research, even during acquisition,
such as amplification, filtering, and denoising. Nor-
malization can be performed on the whole collected
biosignals; however, real-time systems need to use
accumulated normalization, for only a continuous in-
flux of short-term streams is available. We did not
focus on the DSP approaches before windowing, for
they are more hardware-based and device-related. We
conducted a series of window-based (DSP) experi-
ments, especially on sensor selection (Liu, 2021), fea-
ture stacking and feature space reduction (Hartmann
et al., 2020) (Hartmann et al., 2021), feature selection
(Liu, 2021), and high-level feature design (Hartmann
et al., 2022a), to ensure the no-deep learning’s min-
imum sensor group and efficient feature representa-
tions.
Besides, some basic parameters of DSP, such as
window length and overlap ratio, also need to be op-
timized in the process of parameter tuning, for which
we conducted an analysis of human activity duration
and concluded that a typical single motion of an av-
erage human body is basically between 1—2 seconds
and is normally distributed in the population (Liu and
Schultz, 2022).
On a Real Real-Time Wearable Human Activity Recognition System
713

We used hidden Markov models (HMM) (Ames,
1989) to model human activities (Xue and Liu, 2022).
On the pilot dataset, each activity was modeled with
one HMM state, achieving high accuracy on the
seven-class person-dependent recognition. Increas-
ing the HMM for each activity to the same num-
ber of HMM states was subsequently studied. Re-
lated literature (Rebelo et al., 2013) using ten HMM
states provided a reference. We investigated one to
ten HMM states for person-independent recognition
and concluded that using eight HMMs for each activ-
ity yielded the best results on the applied experimental
data. A question arose: It may be a reasonable choice
to describe walking with several states, but is it neces-
sary to have eight states for standing or sitting down?
We solved the problem by proposing Motion Units to
model human activities (Liu et al., 2021b):
• Could/should each activity contain a separate, ex-
planatory number of states?
• Is there an approach to design HMMs of hu-
man activities more rule-based, normalized over
blindly “trying”?
Inspired by kinesiological knowledge and the con-
cept of the phoneme in ASR, each activity is com-
posed of a different number of Motion Units. Mo-
tion Units are shareable among relevant activities, and
the whole human activity modeling scheme based on
MUs is highly interpretable, generalizable, and ex-
pandable.
3 REAL-TIME SYSTEM
Real-time systems are not necessarily the ultimate
goal of HAR. Meanwhile, a great offline HAR model
does not certainly fit a real-time system. Therefore,
applying HAR in real-time scenarios as a way forward
requires many aspects that must be investigated.
3.1 From Offline Towards Online
Many hardware, software, model, and parameter ad-
justments play pivotal roles in moving from offline to
real-time HAR recognition.
3.1.1 Window Length and Overlap Ratio
The window length and the Ratio length not only af-
fect the offline HAR modeling but are also two of the
most critical parameters for the real-time HAR per-
formance in an actual system, which impact at least
the following aspects that have relationships between
each other: recognition accuracy, response speed,
computational cost, and (real) real-time. By linking
window length and the overlap ratio, a shorter step
size results in a shorter delay of the recognition out-
comes, but the interim recognition results may fluctu-
ate due to temporary search errors. On the other hand,
longer delay due to long step sizes contradicts the
characteristics of a real-time system, though it gen-
erates more accurate interim recognition results (Liu
and Schultz, 2019).
In (Liu and Schultz, 2022), we concluded through
statistical analysis that a normal, healthy single mo-
tion lasts about 1—2 seconds and is normally dis-
tributed among the population, which is the a priori
information benefiting the parameter-tuning experi-
ments of window length and overlap ratio to optimize
the balance of recognition accuracy versus processing
delay.
The results of our iterative experiments and sta-
tistical analysis can provide the following expe-
rience as a reference for a real-time HAR sys-
tem that recognizes single motions (e.g., walking
forward/upstairs/downstairs/in-curve, standing up,
sitting down, one-leg/two-leg jumping, and squatting,
among others) and stable postures (e.g., standing, sit-
ting, and lying, among others): a window length of
400 ms and an overlap ratio of 50% (i.e., 200 ms).
Moreover, the choice of window length and over-
lap ratio is also related to other factors, such as the
features chosen, the task of recognition (immediate
interaction versus accurate analysis), and the termi-
nal/server performance, among others. The two pa-
rameters must be experimented with comprehensively
for each specific research orientation and application
scenario.
3.1.2 Sensor and Device Selection
Offline sensor selection experiments help identify ef-
fective sensors for HAR and uncover those that are
redundant or of little help (Liu, 2021). However, real-
time systems are geared toward real-world applica-
tions, so further narrowing down the types and num-
bers of sensors is a more beneficial process. In ad-
dition, the choice of simpler, smaller, and lighter de-
vices contributes to the ease of use of the technology.
A practical experience: Experiments show that apply-
ing both ACCs and GYROs on the upper and lower
leg improves recognition accuracy, but taking away
GYRO results in only a tiny decrease in accuracy
(Liu, 2021). Therefore, combined with the require-
ments of small-scale and wearability, a completely
wireless MuscleBAN
3
that does not contain GYRO
3
https://www.pluxbiosignals.com/products/muscleban-
kit (accessed December 20, 2022)
WHC 2023 - Special Session on Wearable HealthCare
714

Figure 2: The “Sensors” option in the main menu of our real-time HAR system.
Figure 3: The “Activities” option in the main menu of our real-time HAR system.
and has ACC and EMG sensors can be a better choice
for a (real) real-time HAR system.
In our real-time HAR system, various sensors are
free to be connected and selected to test the perfor-
mance of different sensors and their combinations in
the actual recognition process (see Figure 2).
3.1.3 Feature Selection
Deep learning uses deep feature representations.
However, recent literature suggests that deep
learning-based recognition does not work principally
superior to the application of handcrafted features
(Bento et al., 2022), which has been validated on
various datasets. For example, on the CSL-SHARE
dataset (Liu et al., 2021a), the recognition accuracy
achieved by the Motion Units-based HMM modeling
(Liu et al., 2021b) mentioned in Section 2.3 outper-
formed the deep neural network algorithm and its
variations (Mekruksavanich et al., 2022). The same
happens as well for other datasets (Hu et al., 2018)
(Micucci et al., 2017). Equally important, Motion
Units activity modeling is entirely interpretable, and
it is straightforward to model new activities, just like
adding new words in automatic speech recognition,
which makes training and recognition efficient.
Non-deep learning involves the procedure of fea-
ture extraction. The time consumption of the fea-
ture computation significantly impacts the real-time
recognition, yielding a time complexity investiga-
tion. We applied the Time Series Feature Extrac-
tion Library (TSFEL) (Barandas et al., 2020), which
has been proven effective and efficient in previous
work on multimodal biosignal processing (Naseeb
and Saeedi, 2020) and our previous signal process-
ing studies (Liu et al., 2022b) (Liu et al., 2022c).
In (Rodrigues et al., 2022) and (Liu, 2021), the au-
thors listed and applied most features with low com-
putational complexity in the temporal, statistical, and
frequency domains from TSFEL. Such kind of study
provided valuable references for real-time HAR sys-
tems.
3.1.4 Graphical User Interface Design
We developed a graphical user interface (GUI) for
real-time HAR recognition on the ASK baseline soft-
ware. In addition to the “sensors‘” option, as men-
tioned in Section 3.1.2, the activities to be recognized
can also be selected in the main menu (see Figure 3).
In the real-time recognition window, the left side
visualizes the real-time multichannel biosignal curves
of all installed and selected sensors, and the right side
continuously displays the window-based recognition
results (see Figure 4). Our in-house HMM recognizer
BioKIT (Telaar et al., 2014) automatically provides
the n-Best recognition results, where typically, n is set
to 3, i.e., three possible recognition results are illus-
trated. A prominent color indicates the activity with
the highest probability.
A well-run plotting animation for real-time HAR
is visually stimulating and appealing to the viewer.
However, visualization is not always indispensable.
For example, when interacting or controlling with
HAR, people tend to focus solely on whether the
recognition results can be used to accurately inter-
operate with the system and do not care whether the
resulting biosignals are visualized or the different re-
sults are described in detail.
Figure 4: Screenshot of the real-time HAR interface. Left:
the visualization of multimodal biosignal acquisition; right:
the 3-best recognition results; bottom right: a video record-
ing of the corresponding activity. The video was synthe-
sized and was not a software feature.
On a Real Real-Time Wearable Human Activity Recognition System
715
3.2 Novel Online Functionality:
On-the-Air Plug-and-Play
After achieving a stable performance of the basic real-
time HAR that initially contains seven daily activities
(sitting, standing, sitting down, standing up, walking
forward, walking a left-turn curve, walking a right-
turn curve), we have innovated a plug-and-play func-
tion, which is designed to easily and quickly add new
recognizable activities to the system or provide new
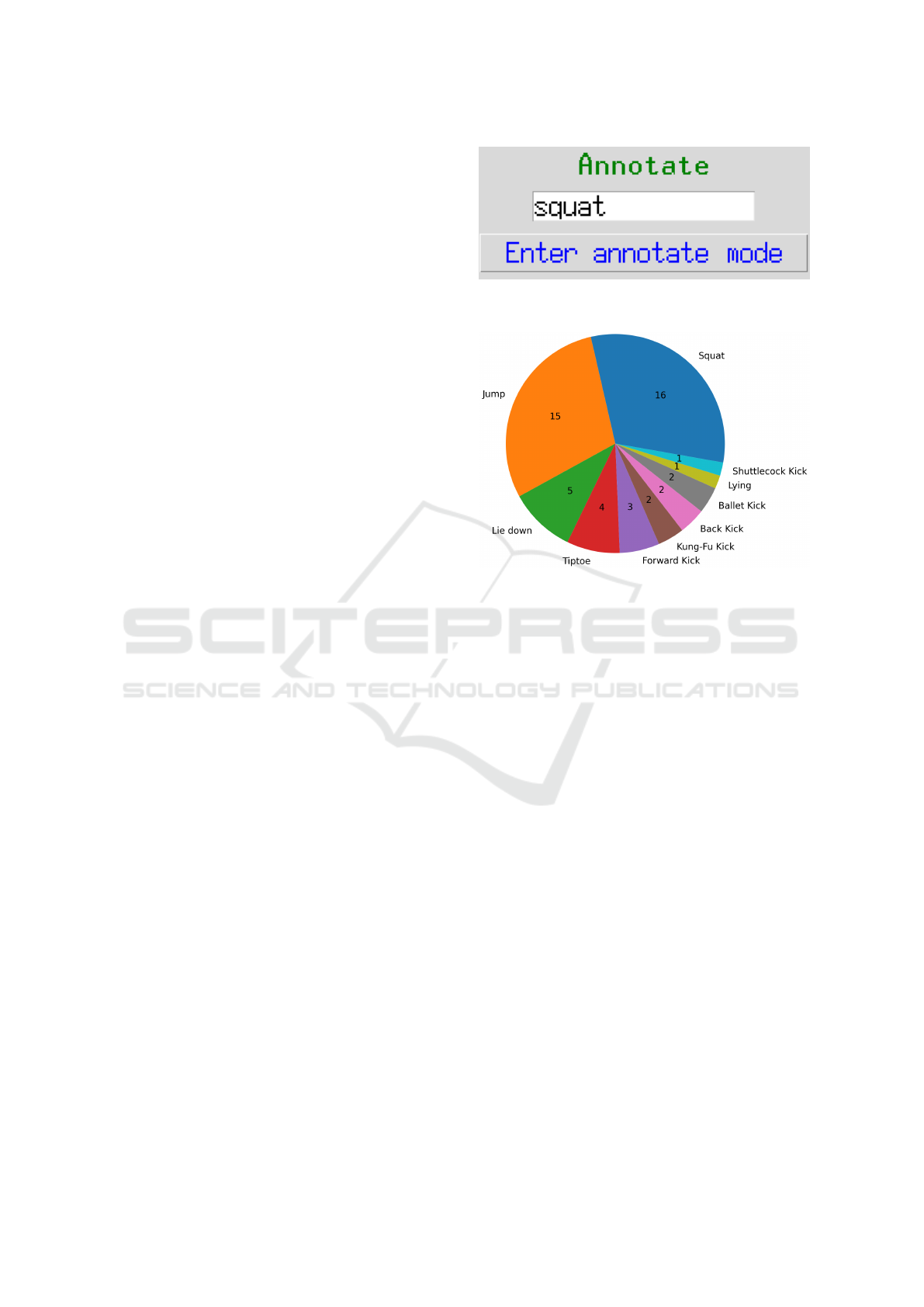
data to existing activities. The user can input the (new
or existing) name of the activity in the main menu and
enter the “Annotate” mode (see Figure 5). The sys-
tem will start multimodal biosignal collection and the
”protocol-for-pushbutton” mechanism for automatic
data segmentation and annotation. After about one
minute of recording, the real-time HAR system is
restarted, and the newly collected data are trained to-
gether with the initial corpus: either an existing activ-
ity’s model is updated with additional data, or a new
activity is ready for recognition.
In dozens of live demonstrations over the past four
years, this on-the-fly add-on function has always been
well received. During the interactive sessions, schol-
ars and engineers from different domains proposed
various new activities to challenge the system’s ro-
bustness. It is worth mentioning that none of the new
activities proposed by the audience failed to be recog-
nized.
All proposed activities from third parties are listed
and counted in Figure 6, with the purpose of helping
researchers know which everyday whole-body activi-
ties, in the opinion of people in different fields, should
be valuable for a real-time HAR system but rarely ex-
ist in HAR datasets.
4 EVALUATION OF REAL-TIME
PERFORMANCE
Recent research shows that validation methods can in-
fluence HAR mobile systems (Braganc¸a et al., 2022).
Like machine learning algorithms’ evaluation in other
fields, offline HAR models can be evaluated and val-
idated through quantitative metrics and processes, in-
cluding:
• Different types of recognition rates, such as macro
average accuracy.
• Different types of error rates.
• Precision values.
• Recall values.
• F1-scores.
Figure 5: The “Annotate” option in the main menu of our
real-time HAR system.
Figure 6: Proposed activities from third parties for chal-
lenging the plug-and-play add-on in our real-time HAR sys-
tem during different demonstration events. The numbers in
the pie chart deliver how many times each activity was pro-
posed and tested.
• Confusion matrices.
• Different types of cross-validation approaches,
such as n-fold cross-validation and leave-one-out
cross-validation (LOOCV).
However, the abovementioned metrics and pro-
cesses cannot be directly grafted into evaluating real-
time HAR systems.
4.1 Pseudo-Real-Time Evaluation
The evaluation of a real-time (recognition) system and
real-time evaluations (RTE) are two different things.
A straightforward evaluation scheme for real-time
HAR can be realized in a pseudo-real-time way:
• If the training dataset is a field collection without
strict protocol and annotated well, any data piece
of it can be used to simulate a real-time data ac-
quisition to evaluate the system’s performance in
real-time recognition by the metrics listed above.
Limitations: In this case, the pseudo-real-time
validation is similar or even the same as the offline
model evaluation, providing few research values.
• The training dataset, in most cases, is recorded
following rigorous or relatively strict acquisition
WHC 2023 - Special Session on Wearable HealthCare
716

protocols. For example, in one session of one
participant, one particular activity or activity se-
quence is specified to be acquired several times
orderly. Manual synthesis is required to simulate
a pseudo-real-time time series with such a dataset,
such as extracting various slices of the same par-
ticipant in different recorded sessions, splicing
them, and reannotating the generated pseudo data.
Limitations: the synthesis cannot guarantee that
the artificial data can highly simulate the data se-
quences recorded in a realistic real-time system.
Pseudo-real time, though practical to implement,
is not a substitute for real real-time evaluation.
4.2 Is the System Real Real-Time?
The observations and subjective perceptions of the
experimenter and audience are not negligible real-
time evaluation criteria. A system that is consistently
quickly responsive but inaccurate, or a system that is
accurate but generates increasing recognition delays,
can be perceived by the naked eye in a certain period
on the basis of intuitive and detailed result visualiza-
tion. In addition, quantitative analysis can be done
objectively to facilitate the researcher’s judgment. We
recorded the time applied for each recognition com-
pletion in the backend of our system, and the average
response time was 84.72 ± 10.09 ms per recognition
(20 sessions, each over 120 minutes). Since the win-
dow length and the overlap ratio used in our system
for optimal performance are 400 ms and 50%, respec-
tively, the step size of the real-time recognition is 200
ms. According to the comparison between 84.72 ms
and 200 ms, our system does not output recognition
results more and more slowly because of the passage
of time, which reflects its real-time capability from
one perspective.
It is essential to point out that, unlike the anal-
ysis metrics of the offline model, the real-time per-
formance analysis metrics are machine-dependent.
The configuration of the host machine, the energy
mode (battery/power supply), the system setups, the
biosignal devices’ battery level, the wireless (Blue-
tooth/WLAN) transmission stability, and the visual-
ization’s resource consumption, among others, all af-
fect the response time of the real-time HAR system.
We used a 6-year-old Intel Core i7 laptop with av-
erage configurations, an external power supply, in-
tegrated graphics, 16 GB RAM, and Bluetooth 3.0.
Therefore, the values measured on this machine ob-
jectively exhibit that the real-time performance of our
HAR system should be pervasive to a great extent.
4.3 Is the System Robust?
We answer this question objectively with a series of
quantitative metrics, aiming to provide some ideas
and references.
Our system has been demonstrated more than 50
times so far in public events such as academic con-
ferences, project meetings, industrial exhibitions, and
science fairs. The events range from a small talk of
less than an hour to a technology booth of several
hours. Based on the most conservative estimate, the
system has been publicly demonstrated for more than
1,500 minutes (30 minutes × 50 times). This dura-
tion does not include pre-event preparation rehearsals,
regular system maintenance, and other tests. At all
times, the system has never failed to work in any way.
We performed 20 sessions of continuous recogni-
tion runs, each lasting over 120 minutes. That means
a total of over 1,440 minutes. The efficiency and ac-
curacy of the recognition were consistently validated
and ensured during these trials (see Chapter 4.2). The
time of 120 minutes has a substantial reference value,
considering the upper limit of the battery supply of
the wearable biosignal acquisition equipment.
Our plug-and-play add-on has also been chal-
lenged more than 50 times so far, with a total of
10 new activities proposed by third-party observers,
each of which has been perfectly recognized. Plug-
and-play multimodal data acquisition and automatic
segmentation and annotation mechanism have always
performed satisfactorily.
Admittedly, as with all software engineering tasks,
large-scale and long-duration field-testing is the ulti-
mate way to verify and assure the quality of a real-
time HAR system. The above subsections aim to sup-
ply researchers with some experience for the evalu-
ation of the designed real-time HAR system prior to
being able to conduct field-testing.
5 TIPS FOR ENHANCING
REAL-TIME PERFORMANCE
Based on our years of experience, we offer some
hands-on means to improve the performance of real-
time wearable systems. They play crucial roles not
only in research or demonstration, but also in facili-
tating biosignal acquisition. After all, data collection
is always in real-time.
• Connect mobile host devices, such as laptops,
tablets, and cell phones, to a continuous external
power supply instead of batteries.
• Configure optimal performance in the operating
On a Real Real-Time Wearable Human Activity Recognition System
717

system instead of the standard or power-saving
mode.
• Charge the batteries of wearable biosignal acqui-
sition devices fully and continuously observe their
battery volume.
• Minimize interference on Bluetooth or WLAN
transmissions, including signal interference and
strong magnetic field interference (e.g., acquisi-
tion devices too close to a charger).
• Pay attention to the distance of wireless transmis-
sions.
• Turn off the irrelevant communication ports on the
host machine, such as switching off the wireless
network connection when Bluetooth is used for
acquiring data.
• Set a reasonable step size for visualization. Plot-
ting animation is resource-consuming.
• Care about the sensor situations constantly, such
as electrodes for bioelectrical sensing. Common
problems include electrode detachment/switch,
no/problematic grounding, and dry electrodes.
The above experiences are referential for real-
time data acquisition, experiment, and demonstration.
Once a real-time HAR system is put into practical ap-
plication, it is impossible to control real users’ behav-
ior.
6 CONCLUSION AND OUTLOOK
A large portion of HAR systems has the ultimate ap-
plication scenarios in real-time. Unfortunately, most
of the literature has limited the study of HAR to
offline models. Some mentioned real-time applica-
tions, but not necessarily to practice, hone and vali-
date real real-time qualities. With our years of expe-
rience developing and demonstrating real-time HAR
systems, we first introduced the implementation of of-
fline HAR models and then focused on the transition
from offline to real-time models. The evaluation of a
real-time HAR system and tips to improve the perfor-
mance of wearable-based HAR are also contributions
of this paper.
Based on the introduced ASK baseline software
and its plug-and-play, ASK 2.0 software focusing on
interactive real-time machine learning is under de-
velopment for open-source sharing, and a preview
version has already yielded good results (Hartmann
et al., 2022b). Meanwhile, segment-based instead
of window-based real-time HAR is also a direction
worth investigating, for which automatic segmenta-
tion by subsequence search (Folgado et al., 2022)
or change point detection (Rodrigues et al., 2022)
by self-similarity matrix can be used as novel input
sources of real-time training and recognition to im-
prove the accuracy. Last but not least, applying real-
time HAR systems to a broader stage, such as fall de-
tection and human-machine interaction in the meta-
verse, is a future research prospect that many scien-
tists strive for.
ACKNOWLEDGMENTS
The research reported in this paper has been par-
tially supported by the German Federal Ministry of
Education and Research; Project-ID 16DHBKI047
“IntEL4CoRo - Integrated Learning Environment for
Cognitive Robotics”, University of Bremen.
REFERENCES
Ames, C. (1989). The markov process as a compositional
model: A survey and tutorial. Leonardo, 22(2):175–
187.
Barandas, M., Folgado, D., Fernandes, L., Santos, S.,
Abreu, M., Bota, P., Liu, H., Schultz, T., and Gam-
boa, H. (2020). TSFEL: Time series feature extraction
library. SoftwareX, 11:100456.
Barna, A., Masum, A. K. M., Hossain, M. E., Bahadur,
E. H., and Alam, M. S. (2019). A study on human
activity recognition using gyroscope, accelerometer,
temperature and humidity data. In 2019 international
conference on electrical, computer and communica-
tion engineering (ecce), pages 1–6. IEEE.
Ben-Ari, M. (2006). Principles of concurrent and dis-
tributed programming. Pearson Education.
Bento, N., Rebelo, J., Barandas, M., Carreiro, A. V., Cam-
pagner, A., Cabitza, F., and Gamboa, H. (2022). Com-
paring handcrafted features and deep neural represen-
tations for domain generalization in human activity
recognition. Sensors, 22(19):7324.
Braganc¸a, H., Colonna, J. G., Oliveira, H. A., and Souto,
E. (2022). How validation methodology influences
human activity recognition mobile systems. Sensors,
22(6):2360.
Folgado, D., Fernandes, Barandas, M., Antunes, M., Nunes,
M. L., Liu, H., Hartmann, Y., Schultz, T., and Gam-
boa, H. (2022). TSSEARCH: Time series subse-
quence search library. SoftwareX, 18:101049.
Greenberger, M. (1965). Programming real-time computer
systems.
Ha, S. and Choi, S. (2016). Convolutional neural networks
for human activity recognition using multiple ac-
celerometer and gyroscope sensors. In 2016 interna-
tional joint conference on neural networks (IJCNN),
pages 381–388. IEEE.
Hartmann, Y., Liu, H., Lahrberg, S., and Schultz, T.
(2022a). Interpretable high-level features for human
WHC 2023 - Special Session on Wearable HealthCare
718

activity recognition. In Proceedings of the 15th Inter-
national Joint Conference on Biomedical Engineering
Systems and Technologies - Volume 4: BIOSIGNALS,
pages 40–49.
Hartmann, Y., Liu, H., and Schultz, T. (2020). Feature space
reduction for multimodal human activity recognition.
In Proceedings of the 13th International Joint Confer-
ence on Biomedical Engineering Systems and Tech-
nologies - Volume 4: BIOSIGNALS, pages 135–140.
INSTICC, SciTePress.
Hartmann, Y., Liu, H., and Schultz, T. (2021). Feature
space reduction for human activity recognition based
on multi-channel biosignals. In Proceedings of the
14th International Joint Conference on Biomedical
Engineering Systems and Technologies, pages 215–
222. INSTICC, SciTePress.
Hartmann, Y., Liu, H., and Schultz, T. (2022b). Interactive
and interpretable online human activity recognition.
In 2022 IEEE International Conference on Perva-
sive Computing and Communications Workshops and
other Affiliated Events (PerCom Workshops), pages
109–111. IEEE.
Hu, B., Rouse, E., and Hargrove, L. (2018). Benchmark
datasets for bilateral lower-limb neuromechanical sig-
nals from wearable sensors during unassisted locomo-
tion in able-bodied individuals. Frontiers in Robotics
and AI, 5:14.
Kuo, S. M., Lee, B. H., and Tian, W. (2013). Real-time digi-
tal signal processing: fundamentals, implementations
and applications. John Wiley & Sons.
Lara, O. D. and Labrador, M. A. (2012). A survey
on human activity recognition using wearable sen-
sors. IEEE communications surveys & tutorials,
15(3):1192–1209.
Liu, H. (2021). Biosignal Processing and Activity Model-
ing for Multimodal Human Activity Recognition. PhD
thesis, Universit
¨
at Bremen.
Liu, H., Gamboa, H., and Schultz, T. (2023). Sensor-
based human activity and behavior research: Where
advanced sensing and recognition technologies meet.
Sensors, 23(1):125.
Liu, H., Hartmann, Y., and Schultz, T. (2021a). CSL-
SHARE: A multimodal wearable sensor-based human
activity dataset. Frontiers in Computer Science, 3:90.
Liu, H., Hartmann, Y., and Schultz, T. (2021b). Mo-
tion Units: Generalized sequence modeling of hu-
man activities for sensor-based activity recognition. In
EUSIPCO 2021 — 29th European Signal Processing
Conference, pages 1506–1510. IEEE.
Liu, H., Hartmann, Y., and Schultz, T. (2022a). A practi-
cal wearable sensor-based human activity recognition
research pipeline. In Proceedings of the 15th Inter-
national Joint Conference on Biomedical Engineering
Systems and Technologies - Volume 5: HEALTHINF,
pages 847–856.
Liu, H., Jiang, K., Gamboa, H., Xue, T., and Schultz, T.
(2022b). Bell shape embodying zhongyong: The pitch
histogram of traditional chinese anhemitonic penta-
tonic folk songs. Applied Sciences, 12(16):8343.
Liu, H. and Schultz, T. (2018). ASK: A framework for data
acquisition and activity recognition. In Proceedings of
the 11th International Joint Conference on Biomedi-
cal Engineering Systems and Technologies - Volume 3:
BIOSIGNALS, pages 262–268. INSTICC, SciTePress.
Liu, H. and Schultz, T. (2019). A wearable real-time hu-
man activity recognition system using biosensors in-
tegrated into a knee bandage. In Proceedings of the
12th International Joint Conference on Biomedical
Engineering Systems and Technologies - Volume 1:
BIODEVICES, pages 47–55. INSTICC, SciTePress.
Liu, H. and Schultz, T. (2022). How long are various types
of daily activities? statistical analysis of a multimodal
wearable sensor-based human activity dataset. In Pro-
ceedings of the 15th International Joint Conference on
Biomedical Engineering Systems and Technologies -
Volume 5: HEALTHINF, pages 680–688.
Liu, H., Xue, T., and Schultz, T. (2022c). Merged pitch his-
tograms and pitch-duration histograms. In Proceed-
ings of the 19th International Conference on Signal
Processing and Multimedia Applications - SIGMAP,
pages 32–39. INSTICC, SciTePress.
Lukowicz, P., Ward, J. A., Junker, H., St
¨
ager, M., Tr
¨
oster,
G., Atrash, A., and Starner, T. (2004). Recognizing
workshop activity using body worn microphones and
accelerometers. In In Pervasive Computing, pages 18–
32.
Mekruksavanich, S., Jantawong, P., and Jitpattanakul, A.
(2022). A deep learning-based model for human ac-
tivity recognition using biosensors embedded into a
smart knee bandage. Procedia Computer Science,
214:621–627.
Micucci, D., Mobilio, M., and Napoletano, P. (2017).
UniMiB SHAR: A dataset for human activity recog-
nition using acceleration data from smartphones. Ap-
plied Sciences, 7(10):1101.
Naseeb, C. and Saeedi, B. A. (2020). Activity recogni-
tion for locomotion and transportation dataset using
deep learning. In Adjunct Proceedings of the 2020
ACM International Joint Conference on Pervasive and
Ubiquitous Computing and Proceedings of the 2020
ACM International Symposium on Wearable Comput-
ers, pages 329–334.
Palyaf
´
ari, R. (2015). Continuous activity recognition for an
intelligent knee orthosis; an out-of-lab study. Master’s
thesis, Karlsruher Institut f
¨
ur Technologie.
Rebelo, D., Amma, C., Gamboa, H., and Schultz, T. (2013).
Human activity recognition for an intelligent knee or-
thosis. In BIOSIGNALS 2013 - 6th International Con-
ference on Bio-inspired Systems and Signal Process-
ing, pages 368–371.
Rodrigues, J., Liu, H., Folgado, D., Belo, D., Schultz,
T., and Gamboa, H. (2022). Feature-based informa-
tion retrieval of multimodal biosignals with a self-
similarity matrix: Focus on automatic segmentation.
Biosensors, 12(12):1182.
Telaar, D., Wand, M., Gehrig, D., Putze, F., Amma, C.,
Heger, D., Vu, N. T., Erhardt, M., Schlippe, T.,
Janke, M., et al. (2014). Biokit—real-time decoder for
biosignal processing. In Fifteenth Annual Conference
of the International Speech Communication Associa-
tion.
Weiner, J., Diener, L., Stelter, S., Externest, E., K
¨
uhl, S.,
Herff, C., Putze, F., Schulze, T., Salous, M., Liu,
On a Real Real-Time Wearable Human Activity Recognition System
719

H., et al. (2017). Bremen big data challenge 2017:
Predicting university cafeteria load. In Joint Ger-
man/Austrian Conference on Artificial Intelligence
(K
¨
unstliche Intelligenz), pages 380–386. Springer.
Xue, T. and Liu, H. (2022). Hidden markov model and its
application in human activity recognition and fall de-
tection: A review. In Communications, Signal Pro-
cessing, and Systems, pages 863–869. Springer Sin-
gapore.
WHC 2023 - Special Session on Wearable HealthCare
720
