
Simulation Based Performance Evaluation of FIWARE IoT Platform for
Smart Agriculture
Kari Kolehmainen
1
, Marco Pirazzi
1
, Juha-Pekka Soininen
1
and Juha Backman
2
1
VTT, Technical Research Centre of Finland, Finland
2
LUKE Natural Resources Institute of Finland, Hyvink
¨
a
¨
a, Finland
Keywords:
IoT, Robotics, Performance, Smart Agriculture.
Abstract:
In the domain of smart agriculture there is a growing demand for the development and implementation of
robotics and Internt of Things (IoT) solutions. Using robots and autonomous vehicles such as Unmanned
Aerial Vehicles (UAVs) for increasingly complex tasks requires coordinating robotic operations taking into
account other robots doing complementary tasks. Using IoT platforms for adding intelligence to cooperation
and coordination is a lucrative possibility. Performance constraints limit the tasks in which co-operation can
be used. Information latency is a key factor for moving autonomous robots in many cases. Using the FIWARE
IoT platform for information integration offers the flexibility of combining cloud-based AI analysis with robot
operations, however it comes with the cost of increased latency. The messaging frequency that is dependent
on the number of parallel robots, as well as their configuration, affects the overall latency of the IoT system.
We present the composition of latency in the FIWARE IoT system and its limit in a practical deployment
scenario.
1 INTRODUCTION
The need to increase the yield of agriculture per land
area as well as the cost of labor unit drive the de-
ployment of robotics in agriculture. As a result, au-
tonomous or semi-autonomous devices are increas-
ingly being utilized in modern agriculture (Grieve
et al., 2019) (Friha et al., 2021). This can encompass
Unmanned Aerial Vehicles (UAVs), robot tractors,
and other utility vehicles designed to reduce manual
labor, increase efficiency, or provide detailed data on
the fields and crops. Each robotic system still requires
its operator and support systems and as such coor-
dination becomes challenging. Coordinating multi-
ple robot operations on the field simultaneously often
lacks systematic approaches.
Internet of Robotic Things (IoRT) is a sub-theme
of IoT focusing on inter-operating robots and devices.
(Ray, 2016). IoRT started as a cloud robotics concept
where part of the computation was executed in the
cloud. Later it has included also approaches where
robots are considered as things and robot virtual mod-
els have been created into IoT systems. There have
been solutions where robots are modeled as virtual
entities, i.e. digital representations of physical things,
but also as digital twins for robots. Digital representa-
tion as IoT nodes gives possibilities to manage robots
in the same way as other things and to use techniques
developed in IoT solutions such as Artificial Intelli-
gence (AI), data analytics, and data fusion solutions
that are typical in IoT platforms. The Digital twin
approach gives tools for example predictive mainte-
nance and to a simulation of control options. In the
case of heterogeneous robot fleets, the IoT platform
can be used as a common framework for managing
fleet operations. Latency is identified as one of the
key factors affecting the use of IoRT (Vermesan et al.,
2020). Forming a realistic perception of latency in-
volved with robots sharing data affects the feasible
use cases of collaborative robots.
In this paper, we analyze the performance con-
straints of using a modern IoT platforms such as FI-
WARE for monitoring and operating a fleet of multi-
ple robots. Understanding bottlenecks on the latency
of overall multi robot control system is important for
assessing feasibility of the overall system. Robots en-
compass various types of autonomous devices oper-
ating in different roles in the same field. Collecting
data from different sources enables safer operation
and building a system that is capable of integrating
data from many sources as needed. The complexity
of managing the operations for a robot fleet can be re-
duced by integrating non-robot specific middleware.
Using open interfaces for robot fleet management has
provided encouraging results in Smart Manufacturing
use cases. (Quadrini et al., 2020)
Kolehmainen, K., Pirazzi, M., Soininen, J. and Backman, J.
Simulation Based Performance Evaluation of FIWARE IoT Platform for Smart Agriculture.
DOI: 10.5220/0011918700003482
In Proceedings of the 8th International Conference on Internet of Things, Big Data and Security (IoTBDS 2023), pages 73-81
ISBN: 978-989-758-643-9; ISSN: 2184-4976
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
73
2 MOTIVATION
The motivation for increasing the complexity of
robotic operations by introducing collaboration of
robots is to leverage and benefit from the different
capabilities of robots. One use case for such collab-
oration is to improve situational awareness of robot
tractors in smart agriculture. An example use case
is silage harvesting where one or more tractors are
mowing and raking the hay while other tractors are
baling the hay. Tractors can benefit from Situational
awareness provided by UAVs coupled with AI-based
object recognition. The combination of these meth-
ods allow for collaboration and enables the farm to
use resources more efficiently and safely.
Another example use case is seeding where mul-
tiple work phases can be potentially automated with
an autonomous robot fleet. Leveraging cloud-based
AI analytic help overcome some of the challenges re-
lated to work distribution between robots.
AI analytic services subscribe to data provided by
UAV and analyse video stream provided by UAV to
detect objects from the field. Hazard detection al-
gorithms can then analyse the detected objects along
with their heading vectors to anticipate possible col-
lision events. Latency of the information is critical in
this scenario in order to determine wide enough safety
boundaries for the objects and robots.
The latency in this proposed multi-robot fleet
monitoring system can be divided into three cate-
gories. First, is latency coming from analyzing the
data provided by the robots. The second is latency
caused by data transfer in wired and wireless net-
works. The third is the overhead latency caused by
the IoT platform. This paper focuses on determin-
ing the IoT system latency and boundary conditions
which affect that.
The reason for this focus is that it is the source
of latency that can be affected by the deployment and
configuration of the system. Network latency is the
major source of latency but is not possible to affect
it. Latency from data analysis is relatively easy to
assess. Latency caused by the IoT system on the other
hand is easy to overlook and include in the network
proportion.
This system was deployed in the European Union
(EU) research project FlexiGroBots where it demon-
strates the use of a drone(s) with robot tractors to en-
hance overall situational awareness. This approach
can be also used to identify needs for analytics and
robot services, i.e. identifying weeds and pests from
the monitoring data as input for weeding robots, etc.
3 PROPOSED SYSTEM
Devices needed for implementing the system are first
of all robots and robot control systems that can com-
municate with the IoT system. The use of IoT systems
in smart agriculture use cases is well-documented
(Farooq et al., 2019) (Garc
´
ıa et al., 2020). FIWARE
is used as a baseline IoT system. FIWARE is a
context management system that implements Next
Generation Service Inteface (NGSI) data model for
internal data structure. The heart of the FIWARE sys-
tem is a context broker (i.e. Orion) that maintains en-
tities and their context information. Context broker
implements a publish/subscribe interface to inform
other components about entity changes.
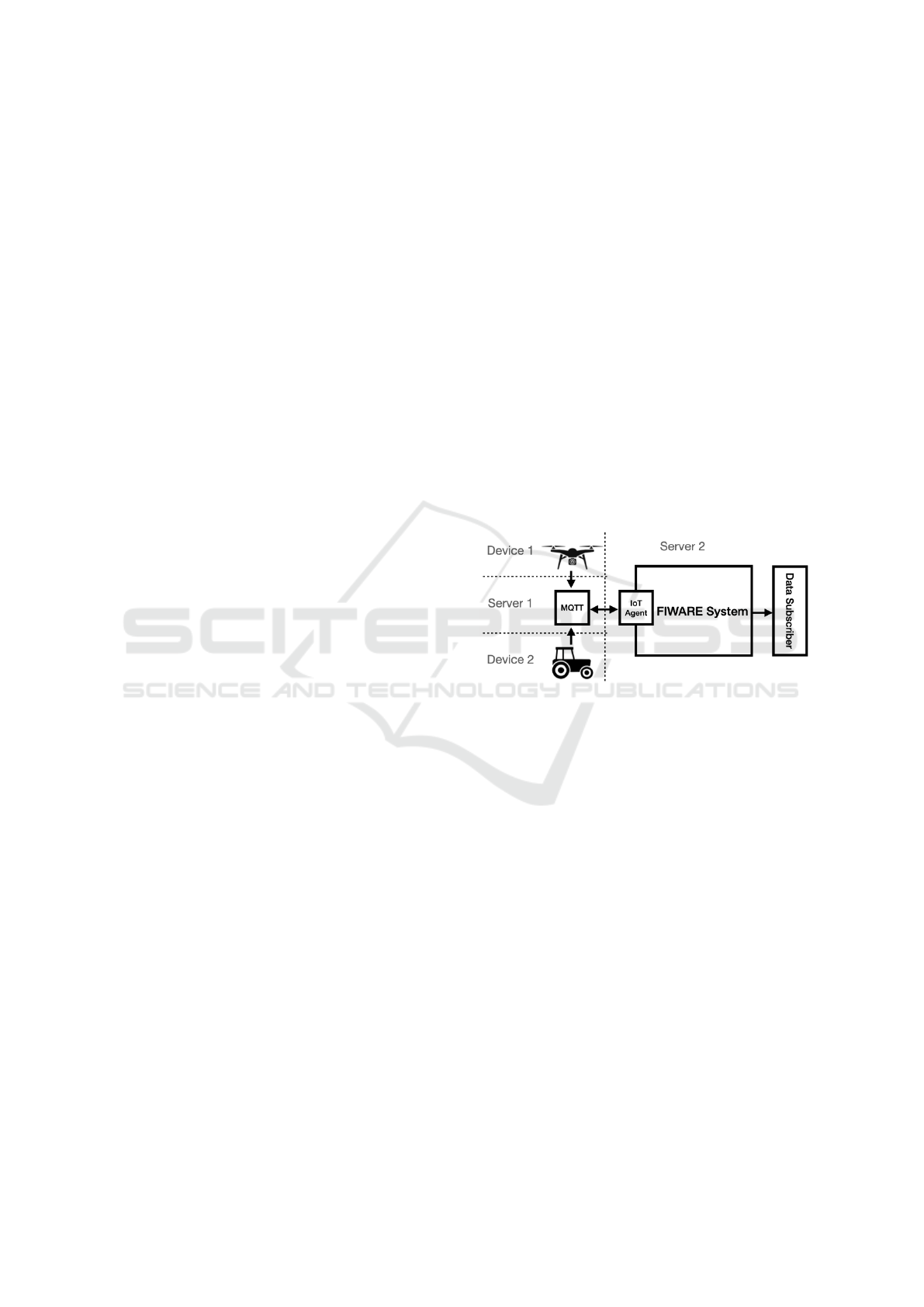
MQTT is an extra layer of abstraction in the sense
that it decouples the IoT platform from the robots.
While MQTT allows flexibility for the system setup it
induces extra latency (Pereira et al., 2018). Whether
that is an acceptable trade-off depends on system re-
quirements.
Figure 1: Deployment architecture of simulation and final
systems.
The motivation for using the MQTT broker is to
simplify the deployment of the system and to decou-
ple devices from underlying IoT platform implemen-
tation. Robot and robot control systems publish data
to the MQTT broker to which FIWARE IoT Agents
subscribe. IoT system handles data using NGSI but
none of the robot systems provide information in
NGSI format directly. IoT Agent is the FIWARE
component that is responsible for translating informa-
tion for the NGSI data model.
Existing research on FIWARE performance char-
acteristics has proven that the FIWARE platform de-
ployed in commercial cloud computing platforms can
scale up to a rate of 1000 requests per second before
becoming unstable. After that latency also starts to in-
crease significantly. Even then the platform imposes
a heavy load on the underlying system. (Araujo et al.,
2019)
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
74

4 MEASUREMENT SETUP
Performance measurements for this study were con-
ducted in two phases. Performance of IoT platform is
measured in isolated setup illustrated in figure 1 and
described in detail in table 1. Performance character-
istics are then validated with a simulator deployed in
a way that corresponds to real deployment as far as
possible.
The performance measurement system is com-
posed of IoT Platform, MQTT Broker, and Load Gen-
erator each running on separate virtual servers as per
in figure 2. IoT platform is a standard FIWARE plat-
form with key components and Orion Context bro-
ker as a centerpiece of FIWARE. MQTT Broker is a
separate publish/subscribe service used by devices for
communication as per figure 1. A load generator is a
component used for simulating traffic coming from
robots. Load generator generates robot position mes-
sages to MQTT broker. A load generator is used for
getting repeatable data for IoT platform stress testing.
Robot simulators (jMAVsim and ground robot
simulator) replace load generators in performance
validation tests. Simulators run on their separate sys-
tems as described in figure 1. FIWARE IoT platform
and MQTT Broker are deployed in validation mea-
surement the same way as with performance measure-
ments.
jMAVsim is a Java-based drone simulator running
on a Linux system. jMAVsim is a standard drone
simulator used for simulating Dronecode based UAVs
that use MAVlink communication protocol. A cus-
tom ground robot simulator is a robot simulator im-
plemented in Python to simulate robot tractor move-
ments on the field.
4.1 Environment Setup
MQTT broker and FIWARE components run on
the same computer hardware but in separate virtual
servers. FIWARE components are deployed as docker
containers in a virtual server.
The environment is installed on a Dell R740 server
running CentOS Linux. The virtualization environ-
ment is built on Linux Kernel-based Virtual Ma-
chine (KVM) and libvirt virtualization library. Dif-
ferent components are running on their dedicated vir-
tual servers that are running a Docker environment.
Docker is used for components as it is a common ser-
vice run on many cloud services.
For Measurement accuracy reasons the simulators
are run on the same physical hardware to eliminate the
effects of clock synchronization issues. The logical
structure of the setup is illustrated in the figure 2
Figure 2: Measurement system setup.
Cloud infrastructure is running on a virtual cloud
server that has four CPU cores (Intel Xeon Silver
4208), 16Gb RAM, and 120Gb hard drive space.
Timestamps are collected as EPOCH timestamps
in microsecond resolution. Hooks for timestamp col-
lection are added to the relevant components.
• MQTT Broker the hook is added to ”han-
dle publish” -function. Topic, as well as a times-
tamp, are printed to match timestamp with appro-
priate robot message
• IoT Agent that is used is implemented with
Node.js. The IoT agent has a handler for incoming
device updates called ”deviceUpdatingHandler”.
Node.js timestamp resolution is milliseconds
• Orion Context Broker is implemented with C++
and for NGSIv2. Orion prints log entries with mil-
lisecond precision on incoming updates.
For practical purposes, additional FIWARE Generic
Enablers like time-series data collection facilities are
left out of the measurements as they are not relevant
for context-based operations.
4.2 Clock Synchronization
Clock synchronization is a major challenge in collect-
ing performance metrics based on timestamps with
distributed systems. The main protocols for synchro-
nizing clocks of networked devices are NTP (Net-
work Time Protocol) and PTP (Precision Time Pro-
tocol). Errors in NTP-based systems are in the 10-
100ms range while sub-millisecond synchronization
is achievable with software-only PTP implementation
and sub-microsecond synchronization with hardware
PTP implementation.(Neagoe et al., 2006)
Another complication in the measurement envi-
ronment is that there are several layers of virtual-
ization involved which potentially can affect times-
tamp collection. Cloud services are running on a vir-
tual server on a Linux host machine and individual
services running on a virtual server are running as
Simulation Based Performance Evaluation of FIWARE IoT Platform for Smart Agriculture
75
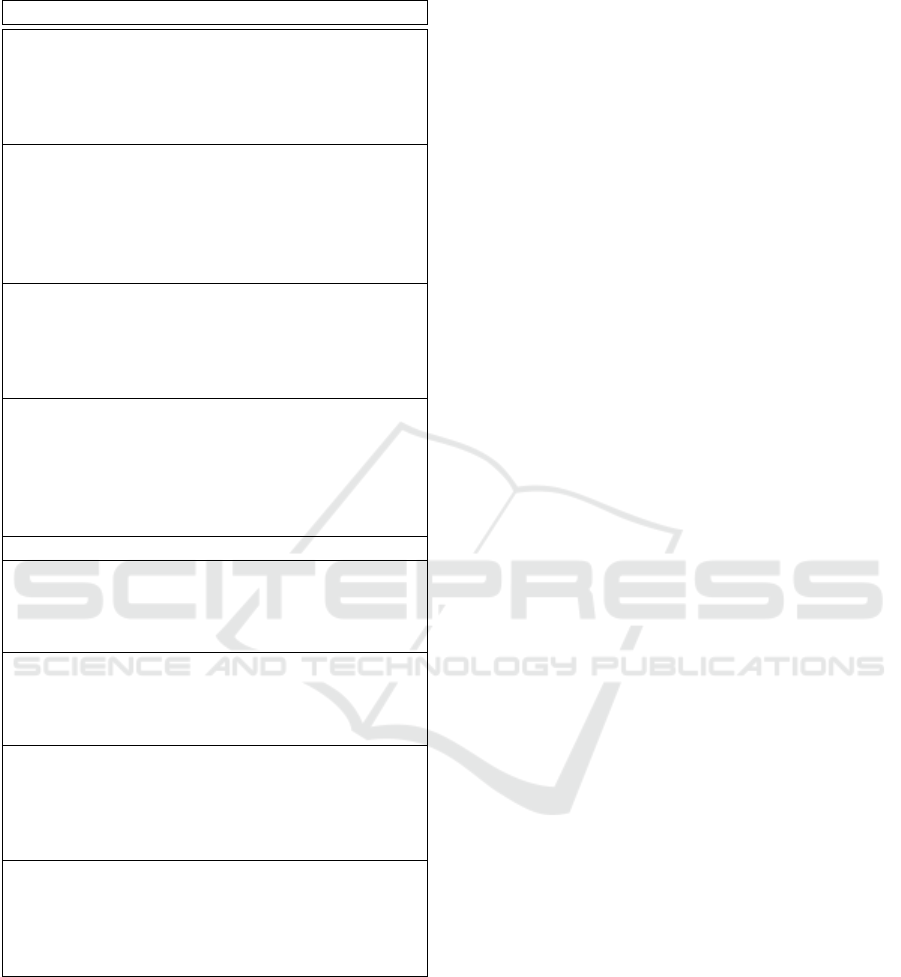
Table 1: System components.
Component Level Description
Host Machine HW CentOS 7.1 running
on Dell PowerEdge
740 with 32 core In-
tel Xeon Silver 4208
CPU @ 2.10GHz
Server1 KVM FIWARE Host virtual
server with Ubuntu
20LTS Linux with
4 CPU cores, 16GB
RAM, and 120GB
disk space
Server2 KVM MQTT virtual server
Ubuntu 20 LTS server
with 4 CPU cores,
16GB RAM and
120GB disk space
Server3 KVM MQTT Load gen-
erator virtual server
Ubuntu 20 LTS server
with 4 CPU cores,
16GB RAM, and
120GB disk space
Orion Docker Orion context broker
IoT Agent Docker Component that im-
plements data trans-
lation from robot to
NGSI format
Consumer Docker Mock AI measure-
ment component for
data coming from
FIWARE platform
MQTT Broker Docker Mosquitto MQTT
Broker modified to
log timestamps of
incoming context
updates
Load Gen Docker Python MQTT client
generating MQTT
messages for the
broker that simulate
Robot context updates
Docker containers. To ensure correct timestamp val-
ues, the virtual server is set to use the Constant Time
Stamp Counter (TSC) of the host machine processor
and PTP synchronization. Clock synchronization is
relatively accurate (within 1ms skew) with the virtual
server as long as the host system load is kept under
60%. (Ahuja et al., 2021)
Clock synchronization is implemented with
Chrony daemon set to take reference clock from
/dev/ptp0 that is mapped to the host system con-
stant timestamp counter (TSC). Data is collected as
recorded log files during simulation and then analyzed
after the data collection phase. This enables compo-
nents running on cloud service to have synchronized
clocks but leaves open the synchronization of clocks
of geographically distributed computers.
Network latency and clock skew are measured
from geographically distributed computers separately.
Depending on the computer as high as 200ms dif-
ferences in clock synchronization were observed.
Clock difference and latency are measured simple
timestamp echo client/server script that implements
a two-way method for clock synchronization (Levine,
2016). Script sends local EPOCH timestamp to other
system and receives remote timestamp in reply. This
allows us to calculate round trip delay and clock dif-
ference assuming symmetrical delays. Delay and
clock difference is characterized by taking 100 sam-
ples and averaging the values.
In a simulation environment using stable wired
networks, this method gives sufficiently accurate re-
sults. In a real-world implementation using mobile
networks, delays can not be assumed to be symmet-
ric, and more comprehensive methods should be used.
4.3 Measurement Points and Latency
Metrics
Times Stamps (TS) are collected from several points
for analysis of latency and throughput constraints.
Time stamps are collected in micro (or milli) second
resolution. The first timestamp (TS1) is from the mo-
ment when message is published to the MQTT broker.
The second step (TS2) is when the MQTT broker re-
ceives the published message. The third step (TS3)
is the moment when IoT Agent receives the message
from MQTT Broker. The fourth step (TS4) is when
Orion receives an NGSI format Entity update request
from IoT Agent. The fifth and final timestamp (TS5)
is the moment that the Orion Entity update message
is received at subscribing Mock AI service.
The latency that we measure is derived from col-
lected timestamps. Timestamps are taken at the be-
ginning of each step. For instance, TS3 is the times-
tamp of when a message is received at the IoT Agent
incoming port. Logging of the timestamp creates a
small overhead but it is determined to be irrelevant.
Lat1 and Lat 4 of these latency measurements
are mostly related to networking lantency as they are
measuring latency in and out from the FIWARE plat-
form. Lat2 and Lat3 are related to latency of the IoT
platform that consist of MQTT Broker as well FI-
WARE Platform. Lat2 and Lat3 are the points where
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
76
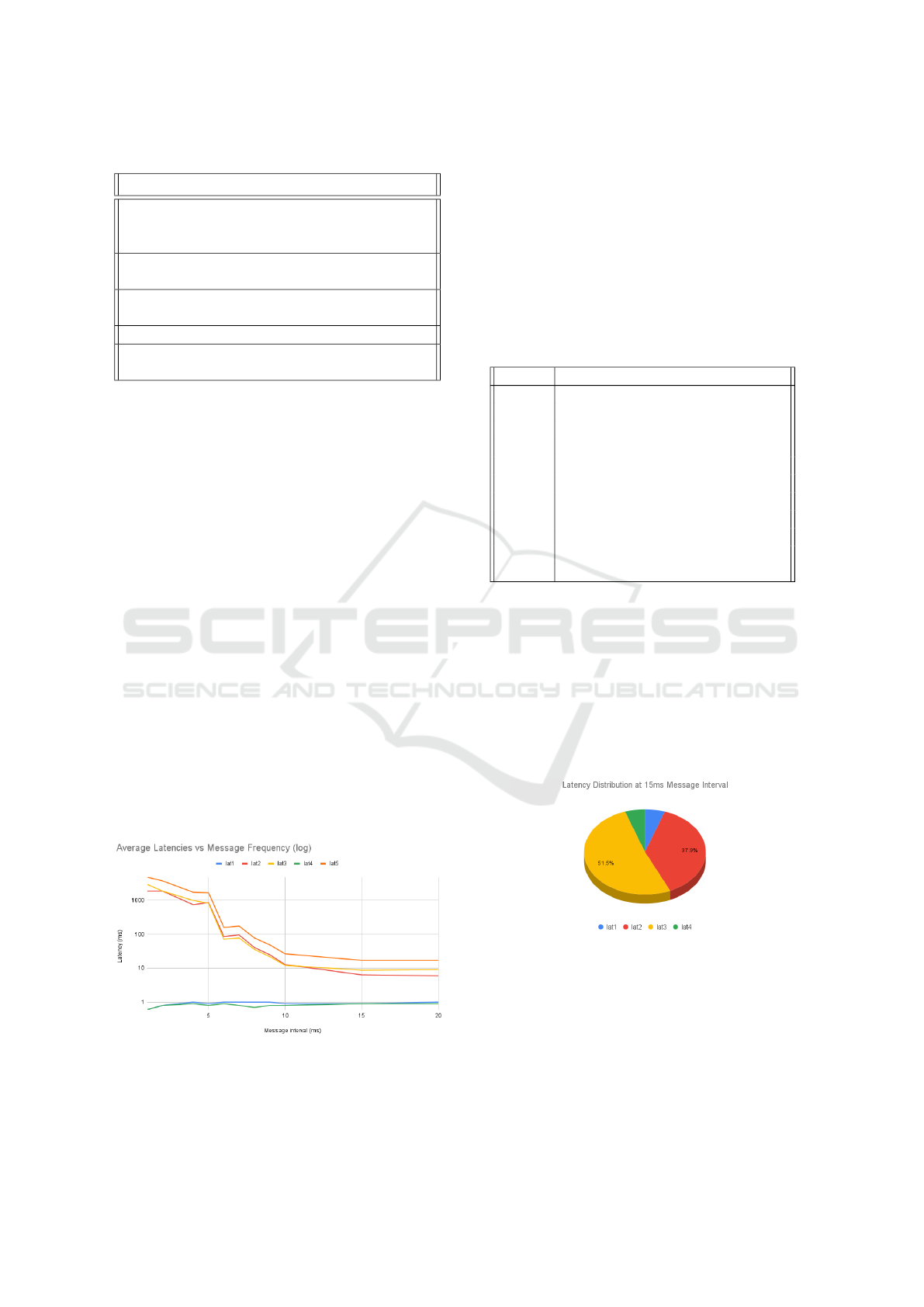
Table 2: Latency measurements.
Measure Calculation Description
Lat1 TS2-TS1 Network latency from
robot to MQTT Bro-
ker
Lat2 TS3-TS2 Latency from MQTT
Broker and IoT Agent
Lat3 TS4-TS3 Data conversion la-
tency in IoT Agent
Lat4 TS5-TS4 Orion publish latency
Lat5 TS5-TS1 Overall latency of the
whole system
data conversions and storage takes place.
5 SIMULATION RESULTS
5.1 IoT Platform Performance
Measurements
MQTT and FIWARE Latency were estimated first
with a load generator to determine the sequential mes-
sage processing capacity of the system. Measure-
ments are completed with 1ms steps from 1ms to
10ms where the rate of change in latency is signifi-
cant. Two measurements with longer 5ms intervals
are taken to verify that there is no unexpected behav-
ior with longer intervals. On each step, over 800 sam-
ples are generated to generate a statistically signifi-
cant number of samples. Sample mean difference of
Lat5 measurement settles to 0.1% difference in about
600 sample size so 800 samples gives some buffer to
achieve reliable arithmetic mean for latency. As ex-
pected relative difference in latency measurement is
highest on longer messaging interval cases.
Figure 3: Latency measurement results.
The load was generated with different intervals
starting from 1ms to 30ms. Data was published via
MQTT in UltraLight format that can be interpreted
by FIWARE IoT agent. IoT Agent then updated the
Orion context broker entity with new values. Orion
provided subscribed applications with new values via
REST API. Program providing REST API for Orion
updated resided in the same system as the FIWARE
platform.
Figure 3 illustrates the behavior of the system.
Latency drops dramatically with messaging intervals
from 1ms to 10ms and stabilizes after a 15ms message
interval.
Table 3: Measurement results (milliseconds).
Interval lat1 lat2 lat3 lat4 lat5
1 0.6 1863.9 2953.7 0.6 4818.6
2 0.8 1870.7 1876 0.8 3747.8
4 1 740.7 988.5 0.9 1727.1
5 0.9 854.1 820.9 0.8 1674.1
6 1 85.9 71.7 0.9 159.3
7 1 95.6 77.6 0.8 174.9
8 1 40.6 35.7 0.7 78
9 1 24.9 21.8 0.8 48.7
10 0.9 12.7 12.1 0.8 26.5
15 0.9 6.4 8.7 0.9 17
20 1 6 9 0.9 17
From this data represented in figure 3 and table 3 it
can be deduced that measurement latency is kept rea-
sonable when the system is loaded with a maximum
of 100 messages per second. Distribution of latency
indicated that MQTT Broker as well as Orion event
notifications cause minimal overhead. The majority
of latency is spent with IoT Agent and Orion Entity
update as shown in figure 4 even in a lightly loaded
case with a 15ms message interval.
Figure 4: Distribution of latency.
Another relevant metric is the system tolerance to
load spikes. From the generated load data we can
observe how latency behaves at the beginning of the
test at high message frequencies. The premise is that
buffering of messages enables the system to process
several samples at the beginning of the test at a higher
rate than later in the test when the system is working
at maximum capacity.
Simulation Based Performance Evaluation of FIWARE IoT Platform for Smart Agriculture
77
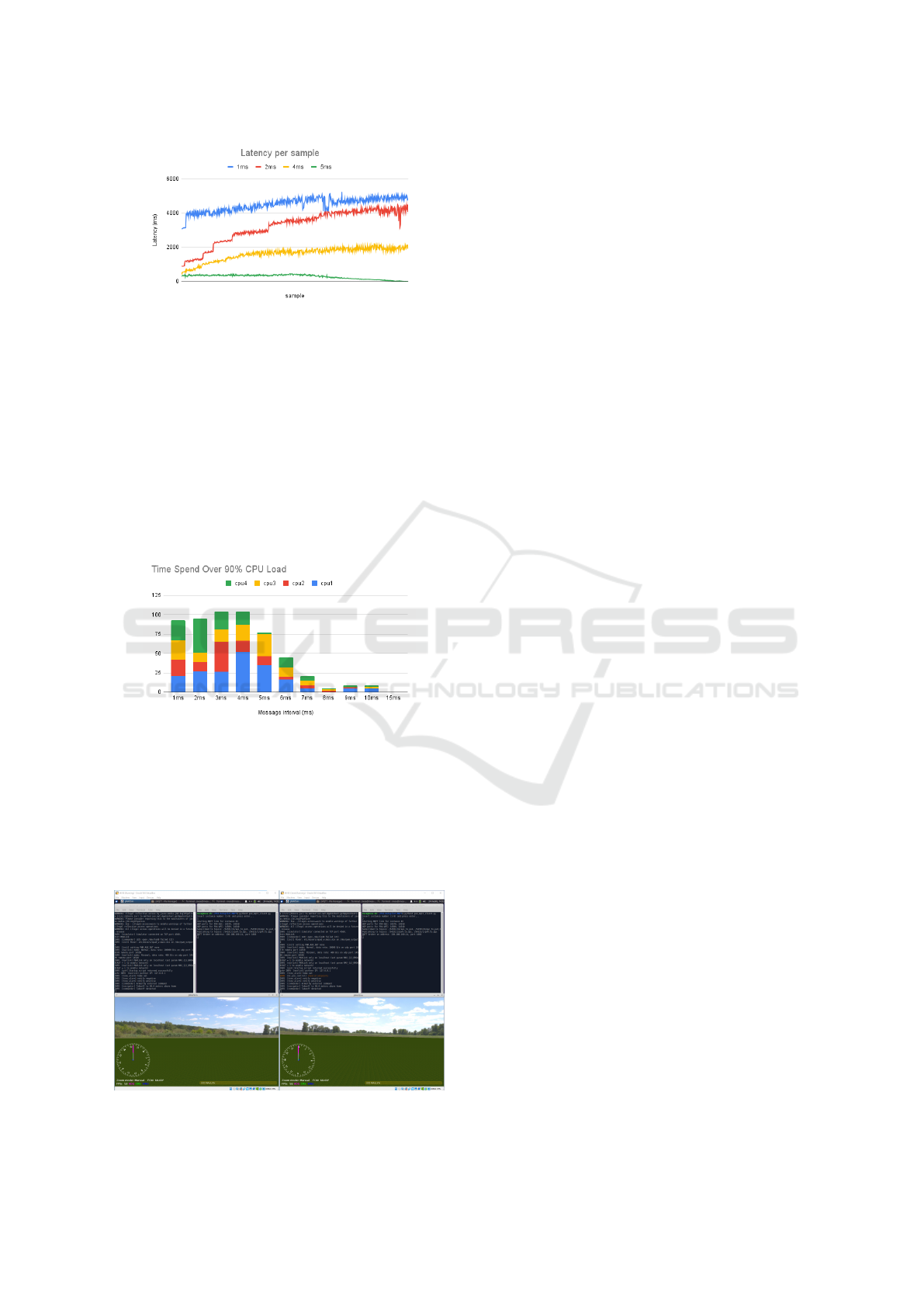
Figure 5: Sample Latency with different frequencies.
From figure 5 it can be observed that this phe-
nomenon is happening to a degree even though the
latency is high from the very first samples onward.
The filling of messaging buffers can be observed
with incremental steps with 1ms and 2ms sample in-
tervals. Latency increases in clear steps while with
longer message intervals increase of the latency is
more gradual. Interestingly latency decreases over the
test time with a 5ms sample interval. Between 4ms
and 5ms message intervals there seems to be a tipping
point where the system is capable of processing mes-
sages and cope with load over time.
Figure 6: FIWARE CPU load per messaging interval.
Figure 6 shows how the FIWARE system CPU
load behaves with different message intervals. This
further highlights the tipping point at the 4ms mes-
sage interval. Before the 4ms tipping point system
load is less meaning that latency is dictated by net-
work and Input/Output (I/O) throughput rather than
CPU processing capacity.
Figure 7: jMAVsim simulators running PX4 firmware.
5.2 Robot Simulator Performance
Measurements
The IoT platform was tested with simulated drones
and robots to validate platform performance as close
to the real use case as possible. Two parallel PX4-
based drones were deployed with simulated missions
with the same virtual farm plot as four simulated robot
tractors (figure 7).
jMAVsim simulators update their position fix
roughly 40 times per second. In practice, frequency is
slightly less than that around 30 to 35 updates per sec-
ond. Simulated robot tractors update their positions
once per second. In total maximum combined mes-
saging frequency is slightly less than 80 messages per
second as can be seen from the dotted line on figure 8
80 messages per second is an average message
interval of 12.5ms which is well within the perfor-
mance bracket of the FIWARE IoT platform running
on the test environment. On simulator measurements
test arrangement differ from platform performance
performance measurements in a way that instead of
load generator Drone simulators are used to gener-
ate realistic data. Two simulated drones are run on
their own virtual machines that are hosted on a sin-
gle HP Laptop. The laptop is connected to internet
via WiFi network and with measured network latency
of 17ms between the laptop and the MQTT broker.
Four simulated robot tractors were running on a dif-
ferent computer and different network that had 30ms
network latency to the MQTT broker. Simulation was
run on single long execution of mission where drones
and robot tractors execute collaborative tasks on smart
agricultural scenario. Latency and message transmis-
sion statistics collected from the simulatation run are
visualised in the figure 8. From data presented in fig-
ure 8 it can be seen that the latency of simulated trac-
tors and drones remains relatively constant when the
number of messages is kept within the performance
bracket of the FIWARE system determined by prior
performance analysis. This is emphasized by the in-
termediate pauses on the mission of Drone2 when
number of messages per second is nearly halved but
not affecting the latency of the other robots. This is
consistent behaviour with the stress testing results.
6 DISCUSSION
Based on the measurements it can be argued that FI-
WARE is capable to cope with messaging as long as
the message interval is kept longer than 5ms. Mes-
saging frequency used in simulations proved the as-
sessment from platform stress testing that at 12.5ms
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
78
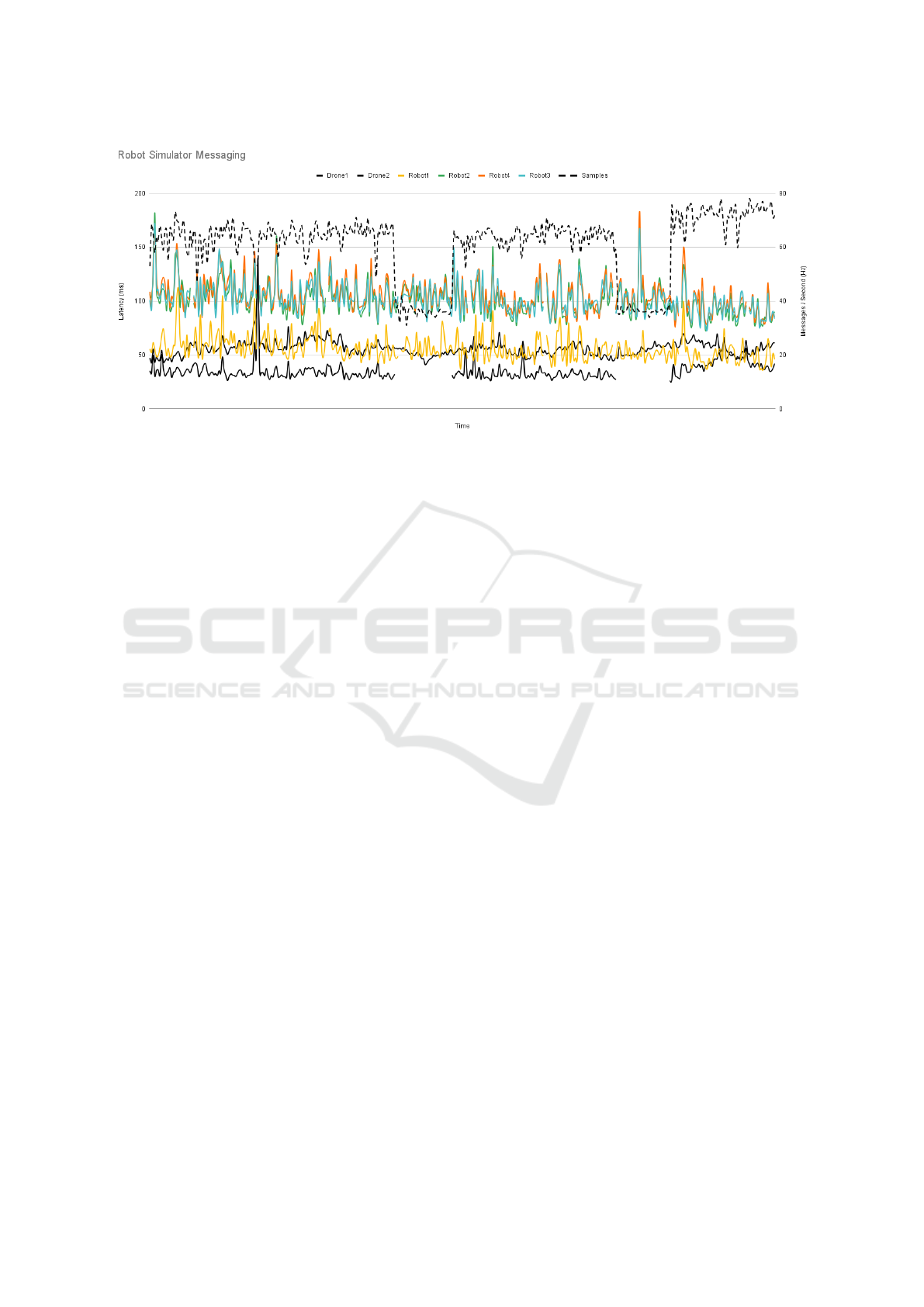
Figure 8: Simulator messages processed by IoT platform. Continuous lines present latency of robots and dotted line overall
messaging frequency.
messaging interval platform latency is not significant.
That can be seen from figure 8 where the gaps of one
simulator going offline do not change the latency of
other running simulators.
The effect of payload size with a combination of
messaging frequency was not measured in this study.
The payload of the Entity update on the MQTT mes-
sage was in the ultralight format. For example, posi-
tion update payload can be
lat|65.0001|lon|25.2728|ele|100.00|h|270.1|v|10.15
where lat, lon, ele, h, and v map to NGSI Entity
attributes. This short message is interpreted by IoT
Agent to match the Device specification which is in
turn mapped to a specific NGSI Entity in the Orion
context broker. NGSI is an ETSI standard for con-
text information model. Translating message payload
from ultralight format to more complex NGSI repre-
sentation requires data processing which is compu-
tationally heavier than simply passing data between
components. This mapping takes place in the IoT
Agent that is represented by the Lat3 in our simula-
tion measurements.
Our results of messaging latency of FIWARE dif-
fer from the study by Araujo et al. so that la-
tency starts to increase in the messaging frequency
of 200Hz whereas in the previous study the latency
started to spike at 1000Hz. In that previous study fo-
cus was more on throughput which is less relevant in
our case. The amount of the data is small in size and
latency is the more important factor. The system was
also set up in the Amazon Web Service (AWS) cloud
which explains part of the difference. Using Linux
sysbench tool CPU performance was given a score of
3950 while AWS cloud machines provide a score of
around 7500. (Araujo et al., 2019) Another difference
is that we are measuring latency until the update to the
subscriber of the context information, and not just the
database. This may have some effect on performance
as well. This leads to the conclusion that the per-
formance of the FIWARE IoT system can be scaled
up if necessary by either improving the CPU perfor-
mance of the host machine or by horizontally scal-
ing the database as proposed by Araujo et al. (Araujo
et al., 2019) (Zyrianoff et al., 2018)
6.1 Performance Requirements in
Smart Agriculture Case
The motivation of the analysis is the piloting of multi-
robot missions in a smart agriculture use case. Multi-
robot mission deploys autonomous harvesting robot
tractors on the field while drones provide situational
awareness for the tractors using AI components from
the IoT platform.
Having a realistic understanding of detection la-
tency objects and robot locations is essential in deter-
mining sufficient safety buffers. Object detection it-
self generates some latency. Popular object detection
frameworks such as You Only Look Once (YOLO)
are capable of detecting objects in video streams that
have a frame rate of 25fps in which case latency
would be 40ms. (Lee and Hwang, 2021)
Our data was collected on a simulator environ-
ment running on wired broadband internet. The typ-
ical latency was 30ms. On mobile 4G network la-
tency can be assumed to be around 100ms. In prac-
tice, the tractors operate on 3-4m/s speed and the total
round trip latency in a realistic system would be about
250ms. This would lead to uncertainty of one meter
of tractor location and safety margins should be set
Simulation Based Performance Evaluation of FIWARE IoT Platform for Smart Agriculture
79

accordingly.
When message interval is kept within the capabil-
ity bracket of the FIWARE platform it will cause only
a marginal overhead. With 10ms messaging interval
26.5ms latency was measured. If loaded beyond the
processing capacity, overhead very quickly increases
to a significant amount. Scaling up cloud computing
capability is necessary if the capacity of the FIWARE
system becomes a bottleneck.
As network latency is dominating factor in normal
use case some strategies to mitigate it is needed. Cop-
ing with network latency in this use case can be done
in one of four ways:
• Increase safety zone to take into account the la-
tency
• Decrease working speed of robots
• Move computation into Edge to mitigate network
latency
• Use low latency networks such as 5G
In a practical use case scenario safety perimeter and
working speed may be the easiest ways of coping with
latency, but adding the edge capabilities or faster net-
work would have less impact on actual work perfor-
mance.
7 CONCLUSIONS
Understanding the distribution of latency in IoT data
collection systems helps to pinpoint bottlenecks in the
data collection system. Suitability to different use
cases and their real-time requirements requires an un-
derstanding of system behavior.
The performance of the FIWARE system is de-
pendent on underlying computing resources and the
messaging load of the system. When going over the
threshold, the latency increases from 17ms to over
4800ms. Determining the system load in terms of
context updates per second is important to keep the
latency within an acceptable limit. The underlying
computing platform processing capability needs to be
sized according.
Based on the findings here capability of the IoT
platform can be determined with a test involving data
subscriber and publisher. In the FIWARE system ma-
jority of the latency is coming from the IoT agent and
Orion. Optimizing cloud service performance param-
eters for those two components provide the best re-
sults for overall performance gains. Additional la-
tency is introduced with actual analysis as well as
communicating messages back to the robot.
Based on the findings here it can be argued that it
is feasible to use FIWARE in the simulated use cases
where the number of simultaneously operating robots
is limited. The latency caused by the IoT platform is
reasonable. If the platform is serving several farms or
fields simultaneously computing resources may need
to be allocated consecutively to keep QoS acceptable.
ACKNOWLEDGMENT
This research was conducted by VTT and LUKE as
part of the European Union’s Horizon 2020 research
and innovation programme under grant agreement No
101017111.
REFERENCES
Ahuja, A., Jain, V., Saini, D., and Al-Turjman, F. (2021).
Measuring clock reliability in cloud virtual machines,
real-time intelligence for heterogeneous networks:
Applications, challenges, and scenarios in iot. In Het-
Nets, 2021, 87-98.
Araujo, V., Mitra, K., Saguna, S., and
˚
Ahlund, C. (2019).
Performance evaluation of fiware: A cloud-based iot
platform for smart cities. In Journal of Parallel and
Distributed Computing 132 (2019) 250–261.
Farooq, M. S., Riaz, S., Abid, A., Abid, K., and Naeem,
M. A. (2019). A survey on the role of iot in agri-
culture for the implementation of smart farming. In
IEEE Access, vol. 7, pp. 156237-156271, 2019, doi:
10.1109/ACCESS.2019.2949703.
Friha, O., Ferrag, M. A., Shu, L., Maglaras, L.,
and Wang, X. (2021). Internet of things for
the future of smart agriculture: A comprehen-
sive survey of emerging technologies. ieee/caa
journal of automatica sinica, 8(4), 718–752.
https://doi.org/10.1109/jas.2021.1003925.
Garc
´
ıa, L., Parra, L., Jimenez, J., Lloret, J., and Lorenz,
P. (2020). Iot-based smart irrigation systems: An
overview on the recent trends on sensors and iot sys-
tems for irrigation in precision agriculture. In Sensors
2020, 20, 1042. https://doi.org/10.3390/s20041042.
Grieve, B. D., Duckett, T., Collison, M., Boyd, L., West, J.,
Yin, H., Arvin, F., and Pearson, S. (2019). The chal-
lenges posed by global broadacre crops in delivering
smart agri-robotic solutions: A fundamental rethink is
required, global food security. In Volume 23, Pages
116-124, ISSN 2211-9124.
Lee, J. and Hwang, K. (2021). Yolo with adap-
tive frame control for real-time object detection
applications. In Multimed Tools Appl (2021).
https://doi.org/10.1007/s11042-021-11480-0.
Levine, J. (2016). An algorithm for synchronizing
a clock when the data are received over a net-
work with an unstable delay. In IEEE Trans
Ultrason Ferroelectr Freq Control. 63(4):561-570.
doi:10.1109/TUFFC.2015.2495014.
Neagoe, T., Cristea, V., and L., B. (2006). Ntp versus ptp in
com puter networks clock synchronization. In IEEE
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
80

International Symposium on Industrial Electronics,
2006, pp. 317-362.
Pereira, C., Cardoso, J., Aguiar, A., and R., M. (2018).
Benchmarking pub/sub iot middleware platforms for
smart services. In Journal of Reliable Intelligent En-
vironments (2018) 4:25–37.
Quadrini, W., Negri, E., and Fumagalli, L. (2020). Open
interfaces for connecting automated guided vehicles
to a fleet management system. In Procedia Manufac-
turing, Volume 42, 2020, Pages 406-413, ISSN 2351-
9789, https://doi.org/10.1016/j.promfg.2020.02.055.
Ray, P. (2016). Internet of robotic things: Concept, tech-
nologies, and challenges. In IEEE Access, 4, p. 9489-
9500, 2016, doi:10.1109/ACCESS.2017.2647747.
Vermesan, O., Bahr, R., Ottella, M., Serrano, M., Karlsen,
T., Wahlstrøm, T., Sand, H. E., Ashwathnarayan,
M., and Gamba, M. T. (2020). Internet of robotic
things intelligent connectivity and platforms. In
Frontiers in Robotics and AI, volume 7, 2020,
https://www.frontiersin.org/article/10.3389/frobt.2020.
00104.
Zyrianoff, I., Heideker, A., Silva, D., and Kamienski, C.
(2018). Scalability of an internet of things platform for
smart water management for agriculture. In Proceed-
ings of the 23rd Conference of Open Innovations As-
sociation FRUCT (FRUCT’23). FRUCT Oy, Helsinki,
Uusimaa, FIN, Article 58, 432–439.
Simulation Based Performance Evaluation of FIWARE IoT Platform for Smart Agriculture
81
