Human Motion Prediction on the IKEA-ASM Dataset
Mattias Billast
1 a
, Kevin Mets
2 b
, Tom De Schepper
1 c
, Jos
´
e Oramas
1 d
and Steven Latr
´
e
1 e
1
University of Antwerp - imec, IDLab, Department of Computer Science, Sint-Pietersvliet 7, 2000 Antwerp, Belgium
2
University of Antwerp - imec, IDLab, Faculty of Applied Engineering, Sint-Pietersvliet 7, 2000 Antwerp, Belgium
Keywords:
Motion Prediction, Graph Neural Network, IKEA-ASM.
Abstract:
Motion prediction of the human pose estimates future poses based on the preceding poses. It is a stepping
stone toward industrial applications, like human-robot interactions and ergonomy indicators. The goal is to
minimize the error in predicted joint positions on the IKEA-ASM dataset which resembles assembly use cases
with a high diversity of execution and background of the same action class. In this paper, we use the STS-
GCN model to tackle 2D motion prediction and make various alterations to improve the performance of the
model. First, we pre-processed the training dataset through filtering to remove outliers and inconsistencies
to boost performance by 31%. Secondly, we added object gaze information to give more context to the body
motion of the subject, which lowers the error (MPJPE) to 10.1618 compared to 18.3462 without object gaze
information. The increased performance indicates that there is a correlation between the object gaze and body
motion. Lastly, the over-smoothing of the Graph Convolutional Network embeddings is decreased by limiting
the number of layers, providing richer joint embeddings.
1 INTRODUCTION
Motion prediction of the human pose estimates future
poses based on the preceding poses. Prediction in the
spatial and temporal dimensions is a challenging task
that has multiple purposes. The overall goal is to im-
prove human-robot interactions, determine ergonomy
indicators and increase safety. A possible use case is
that users get an alert in a VR/AR setup when they are
getting too close to a safety zone or when their pos-
ture is not ergonomic for long assembly tasks. The
human pose is represented by a graph connecting 17
body joints. Typically, the time and space domains
are modeled separately in human pose motion predic-
tion. The time domain can be modeled with Recurrent
Neural Networks (RNN), Long Short-Term Memory
networks (LSTM), Gated Recurrent Unit (GRU), and
recently with Transformers. The joint coordinates and
their interactions are rather modeled with Graph Con-
volutional Networks (GCN). We opted for the STS-
GCN model (Sofianos et al., 2021) as it models the
space and time dimensions together as both dimen-
a
https://orcid.org/0000-0002-1080-6847
b
https://orcid.org/0000-0002-4812-4841
c
https://orcid.org/0000-0002-2969-3133
d
https://orcid.org/0000-0002-8607-5067
e
https://orcid.org/0000-0003-0351-1714
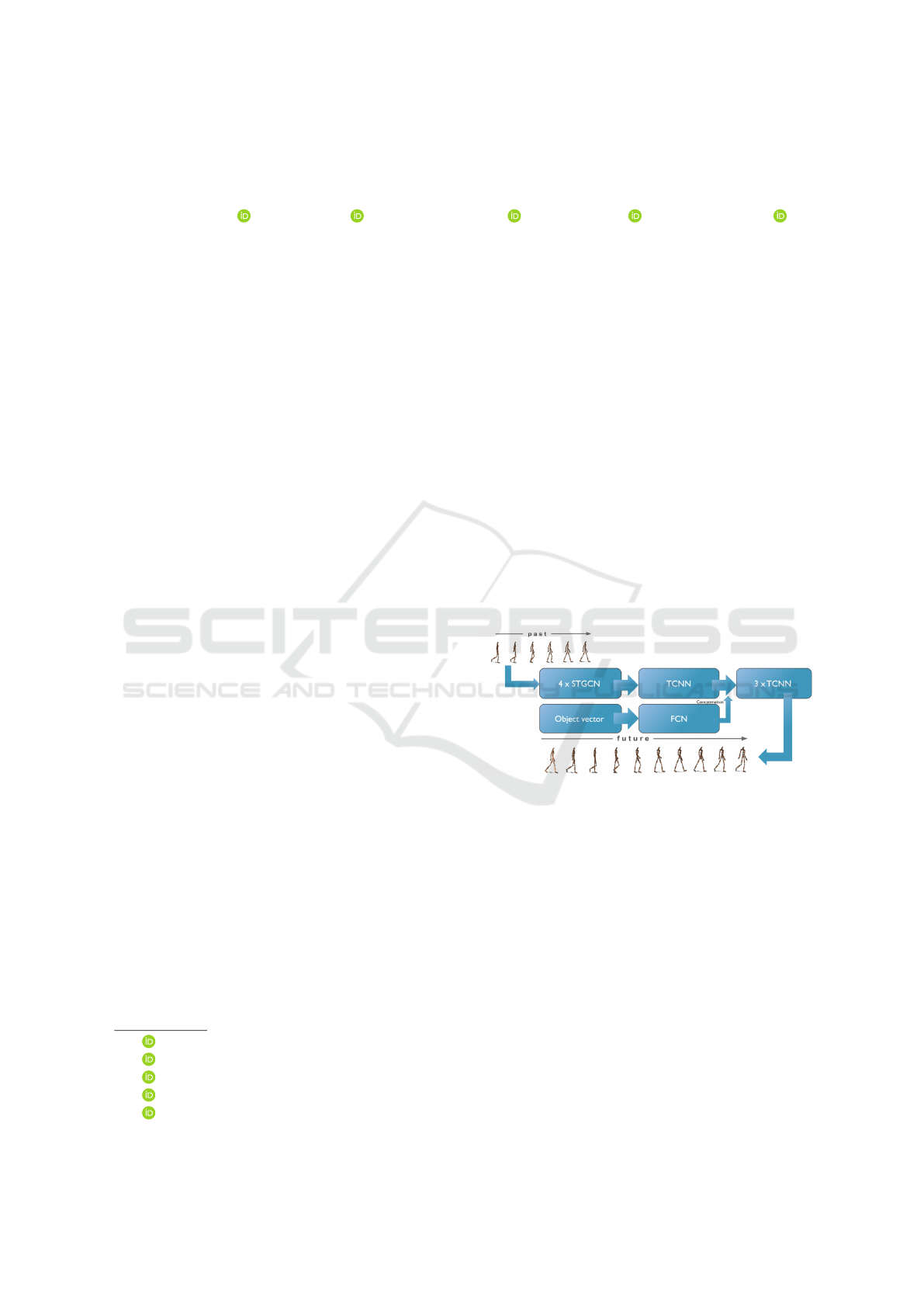
Figure 1: The STS-GCN-2D model architecture with added
object information.
sions are correlated while limiting cross-talk between
the two. Both factors limit the number of parameters
of the model, which enables fast real-time applica-
tions and the scalability of the model. The STS-GCN
model is meant for 3D pose motion prediction but we
repurposed it for 2D human pose motion prediction
on the IKEA-ASM dataset (Ben-Shabat et al., 2020)
for the first time. The goal is to upscale again in fu-
ture work but the 2D case is a good subject to analyze
alterations we made to the original dataset and model.
2D pose estimation models on RGB videos (He et al.,
2017) are also more accurate than their 3D pose coun-
terparts, as the depth dimension is difficult to estimate
with only an RGB camera. All the models are trained
on 2D pose estimations without manual annotations.
Our contributions are three-fold: first, we smooth the
906
Billast, M., Mets, K., De Schepper, T., Oramas, J. and Latré, S.
Human Motion Prediction on the IKEA-ASM Dataset.
DOI: 10.5220/0011902300003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
906-914
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

training dataset with simple filtering methods, to re-
move jumps and noise in the joint coordinates. Sec-
ondly, we add gaze context of the subject by includ-
ing the object they are looking at or interacting with
(shown in Figure 1 as object vector). Adding infor-
mation about which object the subject is looking at,
is also relevant in VR/AR use cases where there is
egocentric data that can be added to the model and
there is already work showing correlations between
the active object and motion prediction (Zheng et al.,
2022). Thirdly, we alter the number of GCN layers
to minimize the over-smoothing effect on representa-
tions (Chen et al., 2020). Over-smoothing in a GCN
occurs when there are too many layers and the nodes
become indistinguishable from each other. This hap-
pens because, at each layer, a node is updated with an
aggregate of neighboring nodes’ feature vectors.
2 RELATED WORK
All recent human pose motion prediction uses deep
learning models to leverage the motion patterns in the
data.
Temporal Encoding. (Butepage et al., 2017) use
Fully Connected Layers to temporally encode the in-
puts and decode them to look like the future outputs.
Another temporal representation technique is RNN
(Zhang et al., 2020) LSTM (Hu et al., 2019; Chiu
et al., 2019), GRU (Yuan and Kitani, 2020; Adeli
et al., 2020). These RNN models perform well but
are difficult to train due to the vanishing/exploding
gradient problem, and have millions of parameters
(Gopalakrishnan et al., 2019) which require more data
to train appropriately. The amount of parameters is
also related to the number of computations, training
time, and inference speed. Similar to an RNN, mod-
eling the time domain with Transformers (Mart
´
ınez-
Gonz
´
alez et al., 2021; Vendrow et al., 2022) reports
good results but also requires a lot of data. We opted
for the Temporal Convolutional Layers (TCN) (Luo
et al., 2018) as it is the state of the art with a relatively
low amount of parameters.
Spatial Encoding. Regarding the spatial aspect,
a Graph Convolutional Network (GCN) (Mohamed
et al., 2021; Sofianos et al., 2021; Li et al., 2021; Liu
et al., 2021) can represent the spatial interactions be-
tween joints in a natural way. The adjacency matrices
can be handcrafted in the shape(Li et al., 2021) of the
human pose or they can be trained iteratively by al-
lowing connections between all nodes(Sofianos et al.,
2021).
IKEA-ASM. To the best of our knowledge, mo-
tion prediction on the IKEA-ASM (Ben-Shabat et al.,
2020) dataset has not been done. Most of the work
on this dataset considers action recognition (Zhao
et al., 2022), action segmentation (Ghoddoosian et al.,
2022), and video alignment (Haresh et al., 2021;
Kwon et al., 2022). The most recent work on this
dataset (Diller et al., 2022) tackles action recognition
and shows that characteristic poses of actions and the
action labels are strongly correlated, which supports
the use of context information when predicting poses.
3 METHODOLOGY
3.1 Problem Formulation
Motion prediction estimates the 2D coordinates of V
joints for K frames given the previous T frames with
V joints’ coordinates as input. The goal is to min-
imize the Mean Per Joint Positional Error (MPJPE)
of the estimated joint coordinates and their ground
truths. The following equation gives the MPJPE:
MPJPE =
1
V K
K
∑
k=1
V
∑
v=1
k ˆx
vk
− x
vk
k
2
(1)
where ˆx
vk
and x
vk
are respectively the predicted coor-
dinates and the ground truth coordinates of joint v at
time k.
3.2 STS-GCN
For all the experiments, the STS-GCN model (Sofi-
anos et al., 2021) is used. It consists of Spatio-
Temporal Graph Convolutional layers (STGCN) fol-
lowed by Temporal convolutional layers (TCNN), see
Figure 1. The STGCN layers allow full space-space
and time-time connectivity but limit space-time con-
nectivity by replacing a full adjacency matrix with the
multiplication of space and time adjacency matrices.
The obtained feature embedding of the graph layers is
decoded by four TCN layers which produce the fore-
casted human pose trajectories.
The motion trajectories in a typical GCN model are
encoded into a graph structure with VT nodes for
all body joints at each observed frame in time. The
edges of the graph are defined by the adjacency ma-
trix A
st
∈ R
V T ×V T
in the spatial and temporal dimen-
sions. The information is propagated through the net-
work with the following equation:
H
(l+1)
= σ(A
st−(l)
H
(l)
W
(l)
) (2)
where H
(l)
∈ R
C
(l)
×V ×T
is the input to GCN layer l
with C
(l)
the size of the hidden dimension which is
Human Motion Prediction on the IKEA-ASM Dataset
907

2 for the first layer, W
(l)
∈ R
C
(l)
×C
(l+1)
are the train-
able graph convolutional weights of layer l, σ the ac-
tivation function and A
st−(l)
is the adjacency matrix at
layer l.
The STS-GCN model alters the GCN model by re-
placing the adjacency matrix with the multiplication
of T distinct spatial and V distinct temporal adjacency
matrices.
H
(l+1)
= σ(A
s−(l)
A
t−(l)
H
(l)
W
(l)
) (3)
where A
s−(l)
∈ R
V ×V
describes the joint-joint rela-
tions for each of T timesteps and A
t−(l)
∈ R
T ×T
de-
scribes the time-time relations for each of V joints.
This version limits the space-time connections and
reports good performance (Sofianos et al., 2021). It
lowers the number of parameters needed which is an
advantage for real-time applications as it decreases
inference speed. The trainable adjacency matrices
with full joint-joint and time-time connections have
attention properties as some nodes/timeframes will be
more important for the predicted motion. Signed and
directed graphs contain richer information to repre-
sent a larger variation of embeddings. In other words,
the adjacency matrix can be asymmetrical with pos-
itive and negative weights. These negative weights
have opposite semantic meaning, so a node can be af-
fected by another node in two opposite ways which
create greater variation.
3.3 Object Information
The idea to use gaze information is explored in Zheng
et al. (Zheng et al., 2022) and shows great poten-
tial. We can hypothesize that the objects the subject
is looking at and interacting with, are correlated with
the motion trajectories. We add the context informa-
tion into the model by concatenating an encoded ob-
ject vector v
oe
of the object that the subject is cur-
rently looking at with the feature embeddings after
one TCNN layer. The concatenation of object vec-
tor and TCNN feature embeddings is shown in Fig-
ure 1. The added input information is ”oracle” data
as we have the annotated action descriptions, which
contain the objects the subject is interacting with. All
(T+K) frames are sampled from the same action in all
experiments to have one action description per sam-
ple. The object vector v
o
∈ R
d×a
is unique depending
on the objects in the action class description of the
sample, with d the maximum number of active ob-
jects together in the scene and a the number of possi-
ble objects in the scene. The first dimension is 2 be-
cause there are a maximum of 2 objects in the action
description and the second dimension is 12 as there
are 12 distinct objects in the action descriptions. An
example of multiple active objects is the description
”align leg screw with table thread” which alludes that
the subject interacts with the leg and the table. The
object vector is fed through a fully connected neu-
ral network layer (FCN) with Relu activation function
and K ×V output nodes. The output is then reshaped
to v
oe
∈ R
K×2×V
to be concatenated with the GCN
embeddings. The weights of the FCN are trained to-
gether with the STS-GCN model and adapted based
on the MPJPE loss function. Figure 1 shows a simpli-
fied version of the architecture.
3.4 Oversmoothing in 2D Case
The original STS-GCN model has 4 layers in the
3D case but we hypothesize that this over-smoothens
the features of the graph network in the 2D case.
The features are a weighted average of the neighbor-
ing nodes’ features and in the 2D case, there is less
information to discriminate between nodes. Over-
smoothing in a GCN occurs when the maximum num-
ber of hops between two nodes on the graph is small.
If this number is smaller than the number of layers,
all nodes contain information about other nodes. At
each layer, the joint is updated with an aggregate of
neighboring joints’ features. The over-smoothing can
be measured with the Mean Average Distance metric
(MAD) (Chen et al., 2020), which is the average co-
sine distance between the hidden representations of
node pairs. By lowering the number of layers, the
MAD value increases and the over-smoothing effect
reduces.
3.5 Using Fewer Joints
The joints that are not occluded generate better pose
estimates compared to occluded joints. The lower
body joints are occluded behind a table in 50% of
the videos (Ben-Shabat et al., 2020). We analyze the
cases where only 2 (hands) and 13 (upper body) joints
are used, to remove noisy data from the data. Figure
2 shows the different graph structures that are used as
input, the kinematic tree with 2 joints (hands) is not
visualized as it is just 2 nodes. The hands’ case is also
a first step towards VR/AR use cases with an egocen-
tric view when the only visible joints are the hands.
4 IMPLEMENTATION DETAILS
All models use 4 TCN layers, but we vary between
2 and 4 STGCN layers. During training, a range of
learning rates was tested and the range of 2 × 10
−3
−
8 × 10
−3
gave the best results. The batch size is 256
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
908
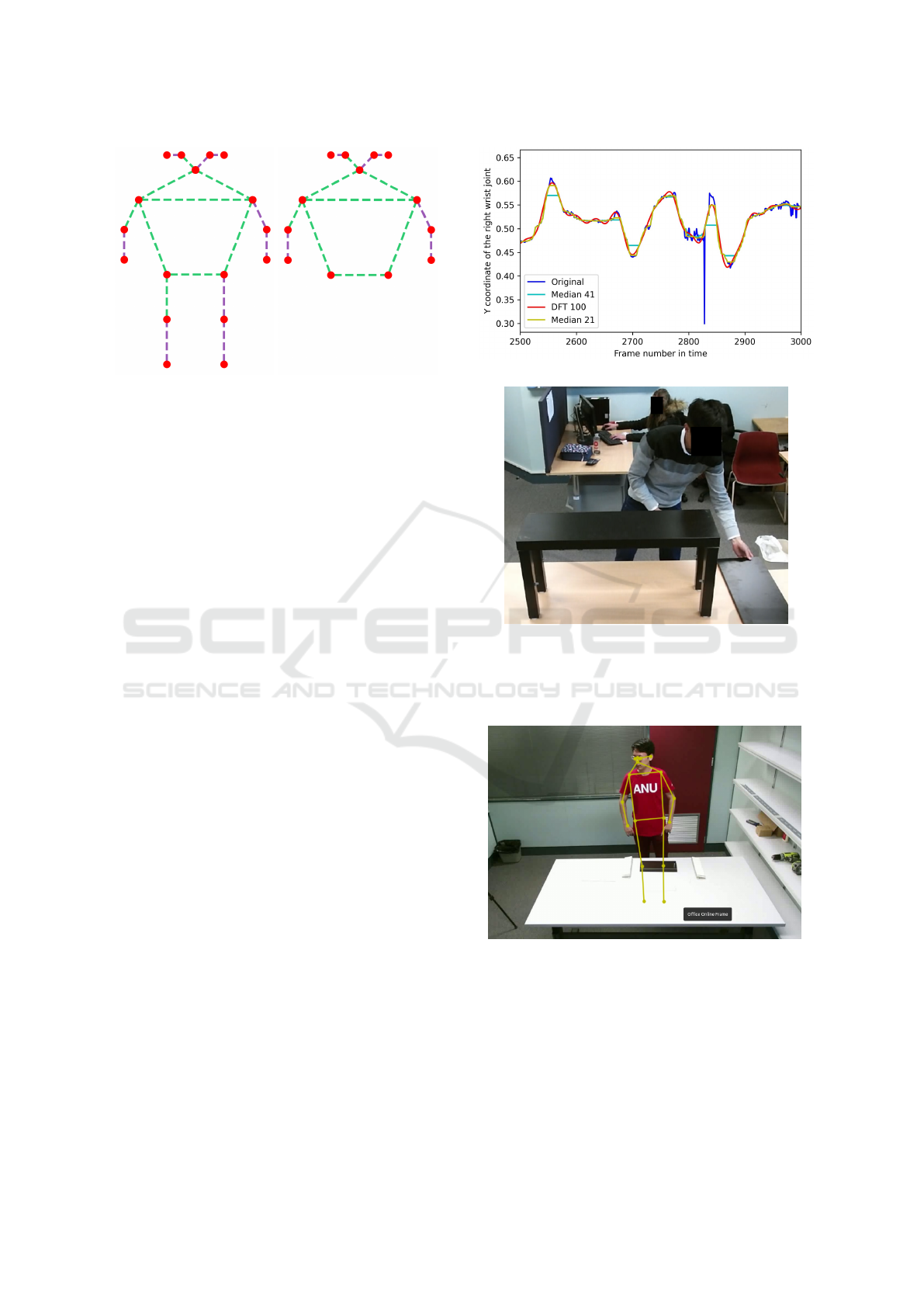
(a)
(b)
Figure 2: Kinematic tree with (a) 17 and (b) 13 body joints.
for all experiments. To update the weights, an Adam
optimizer is used with β
1
= 0.9, β
2
= −.999, and
weight decay parameter λ = 1 × 10
−5
. The numbers
of channels for the STGCN layers are respectively 3,
64, 32, and 64, and the number of channels for all four
TCN layers is 25, equal to the output time frame. All
models are trained for 50 epochs with a learning step
scheduler which lowers the learning rate by a factor
γ = 0.1 at epochs 15, 25, 35, and 40.
5 DATA
The dataset we used is the IKEA-ASM dataset which
consists of 371 assembly videos with 48 unique sub-
jects performing 33 action classes. There are in total
around 3 million frames. Figure 5 shows the num-
ber of samples per action class in a logarithmic scale.
The samples’ distribution has a large influence on the
results and generated outputs of the models. For ex-
ample, the action ”spin leg” is a predominant action in
the dataset but only requires little motion to complete
the action, i.e. turning of the wrist. Thus, models
with a more static forecast are dominant. We chose
the IKEA-ASM dataset because it is directly related
to assembly use cases of motion prediction and has a
high diversity of the same action class as the same fur-
niture is assembled in a variety of ways with different
backgrounds.
5.1 Data Filtering
All frames are annotated by a keypoint-rcnn model
(He et al., 2017). This works most of the time, as can
be seen in a qualitative example in Figure 4, but there
are still jumps in the data when joints are occluded.
Figure 3a shows some examples of the jumps in co-
ordinates in the data for a single joint. To alleviate
(a)
(b)
Figure 3: Data sample example: (a) the right wrist coordi-
nates as a time series with various filters and (b) a snapshot
at the frame when the jump in the time series occurs as the
right wrist is occluded.
Figure 4: Qualitative example of human pose estimator to
annotate data.
the problem of the high-frequency noisy data, multi-
ple smoothing pre-processing methods are tested, i.e.
a median filter (Justusson, 1981), and a discrete Fast
Fourier Transform (DFT) lowpass filter (Nussbaumer,
1981). The DFT filter transforms the coordinate of
the time series to the discrete frequency domain and
only the first 100 frequencies (DFT 100) are used to
Human Motion Prediction on the IKEA-ASM Dataset
909

Figure 5: Distribution of actions in the IKEA-ASM dataset.
reconstruct the time series, thus removing the high-
frequency oscillations. The median filter slides a win-
dow of size x over the time series and returns the
median value within that window. Window sizes 21
(Median 21) and 41 (Median 41) are considered in
the experiments. Figure 3a shows an example of each
smoothing method and Figure 3b shows a frame when
a jump in the right wrist coordinates’ time series oc-
curs.
6 RESULTS
In Tables 1, 2, 3, and 4, the MPJPE is listed for the
various experiments. All experiments are done with
10 input frames and 25 predicted frames correspond-
ing with a 1000ms prediction horizon. This setup is
also used in most motion prediction benchmarks, al-
lowing easy comparison with other methods. The re-
sults with the various modifications, i.e. data smooth-
ing, adding object context, only using a part of the
kinematic tree, and limiting the amount of STGCN
layers are reported.
6.1 Baseline Results
To start, we implemented simple baseline predictions
to have an indication of the relative performance. A
first baseline is a static pose prediction where the last
observed pose is the predicted pose throughout the
prediction horizon. As many static actions exist in the
dataset, the fixed position baseline works relatively
well, as shown in Table 1. Other simple baselines like
predicting the position of joints based on the average
velocity, acceleration, and direction of the joints in the
last 10 observed frames do not improve on the result
of the fixed position baseline on the original dataset.
This is mainly due to the outliers and inconsisten-
cies in the data without pre-processing. These incon-
sistencies are mainly due to the differences in body
joints’ estimation of subsequent frames. The predic-
tion based on the average velocity and acceleration is
given by the following equation:
P
i
= P
input
+ k
v
× v
input
× i +
k
a
× a
input
× i
2
2
(4)
where P
i
is the predicted pose at frame i, ranging from
1 to 25, P
input
is the last pose of the input, k
v
and k
a
are
the damping parameters, v
input
is the average velocity
of the input, and a
input
is the average acceleration of
the input.
6.2 Pre-Processing
We tested three different pre-processing filters, i.e.
DFT 100, Median 21, and Median 41. The DFT 100
filter did smooth away outliers but introduced a si-
nusoidal wave pattern when the original joint coor-
dinates remained constant. Other frequency cutoffs
were considered but they either smoothed too much
or too little. The median filter with a window of 41
(Median 41) smoothed away too much of the origi-
nal data, while the median filter with a window of 21
(Median 21) performed best as it filtered outliers but
still remained true to the original data when there is
little noise.
6.2.1 Baselines
The baseline prediction, where a fixed velocity of the
body joints is considered instead of a fixed position
based on the input frames works better when validated
on the smoothed dataset. Also including the average
joints’ acceleration in the observed frames, see Equa-
tion 4, improves the prediction even further on the
smoothed dataset. An important note is that the aver-
age velocity and acceleration are damped with a factor
k
v
and k
a
of 0.2 and 0.05 respectively as the predic-
tions otherwise overshoot the actual movements for a
horizon of 1000ms.
6.2.2 STS-GCN
In Table 1 the three data filters are examined together
with the STS-GCN-2D model, i.e. DFT 100, Median
21, and Median 41. As shown in Table 1 the Me-
dian 41 filter worked best when the validation data
was also smoothed but this could mean that the data is
over-smoothed which is easier for a model to predict
and does not give a fair comparison. Hence, all the
validation data in subsequent experiments is the orig-
inal un-processed data. When testing on the original
data, using the Median 21 filter for training general-
izes slightly better, so this filter is used for the next
experiments. The sinusoidal wave the DFT 100 filter
introduces, results in a jerky and periodic motion pre-
diction of the joints and thus poor testing performance
on the original data.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
910
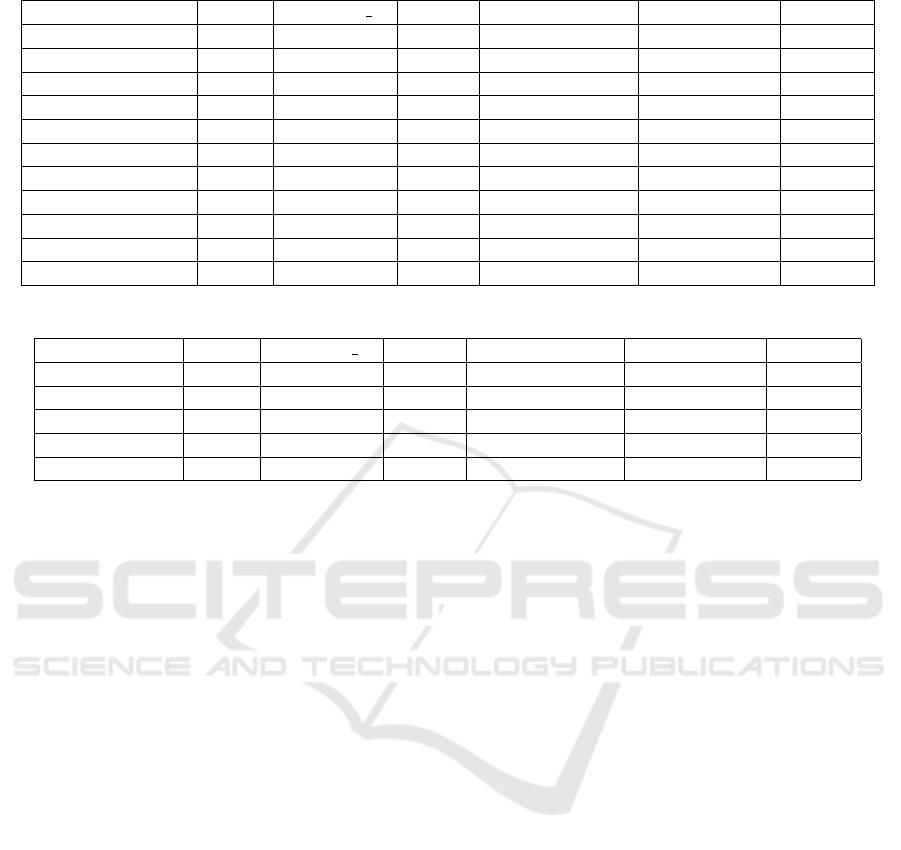
Table 1: MPJPE results of the baselines and adding various dataset smoothing methods.
Model Nodes #STGCN L Object Data train filter Data val filter MPJPE
Fixed position 17 - 7 - Original 13.94
Fixed position 17 - 7 - Median 21 11.37
Fixed velocity 17 - 7 - Median 21 10.02
Fixed acceleration 17 - 7 - Median 21 9.7624
STS-GCN-2D 17 4 7 Median 41 Median 41 8.1938
STS-GCN-2D 17 4 7 Median 21 Median 21 9.9145
STS-GCN-2D 17 4 7 DFT 100 DFT 100 9.7385
STS-GCN-2D 17 4 7 Median 41 Original 12.8814
STS-GCN-2D 17 4 7 Median 21 Original 12.6363
STS-GCN-2D 17 4 7 DFT 100 Original 26.5258
STS-GCN-2D 17 4 7 Original Original 18.3462
Table 2: MPJPE results of the isolated improvements on the STS-GCN-2D model.
Model Nodes #STGCN L Object Data train filter Data val filter MPJPE
Fixed position 17 - 7 - Original 13.94
STS-GCN-2D 17 4 7 Original Original 18.3462
STS-GCN-2D 17 4 3 Original Original 10.1618
STS-GCN-2D 17 2 7 Original Original 16.7893
STS-GCN-2D 13 4 7 Original Original 11.8570
6.3 Architecture Changes
Table 2 shows the results where various changes are
applied to the STS-GCN-2D model.
6.3.1 Active Object Information
Adding object information does perform better than
the model without object information, confirming the
hypothesis that there is a correlation between the ob-
ject the subject is interacting with and the joints’ mo-
tion trajectories. Adding object context has the best
overall MPJPE as there is a lot of added input infor-
mation that is derived from the manually annotated
action labels. In the future, an oracle can be replaced
by an active object estimator which makes it more re-
alistic.
6.3.2 Skeleton Configuration
Limiting the number of joints to 13 (upper body) to
remove unnecessary or error-prone movement regard-
ing the action task at hand improves the results com-
pared to the model with 17 joints. The upper body
has fewer occlusions than the lower body which is oc-
cluded behind a table for 50% of the videos. Follow-
ing this reasoning, the joints’ coordinates of the upper
body are overall more accurate.
6.3.3 Minimizing Over-Smoothing GCN
Using two STGCN layers instead of four provides a
small improvement for the simple 2D model on all
joints. By only using 2 layers, the MAD value in-
creased from 0.58 to 0.60. This is a marginal gain but
it did translate to a small increase in performance on
the testing data, as we compare row 2 and 4 in Table
2. A minimal increase in MAD value by lowering the
number of layers to two indicates that there is less
over-smoothing of the graph representation than with
four layers.
6.3.4 Combining of Improvments
Table 3 shows the performance achieved by various
combinations of the previously explained changes.
Active Object + Smoothing. The table shows that
combining object context and training on smoothed
dataset does not necessarily improve the results on
the original dataset. A possible explanation might
be that high-frequencies present in the original (non-
smoothed) dataset give an indication of what motion
is going to occur and combining with object context
gives a good prediction.
Custom Skeleton Configuration + Smoothing.
Limiting the number of joints to 13 (upper body) or 2
(hands) to remove unnecessary or error-prone move-
ment regarding the action task at hand has different
results. The case with 13 joints improves the results
Human Motion Prediction on the IKEA-ASM Dataset
911
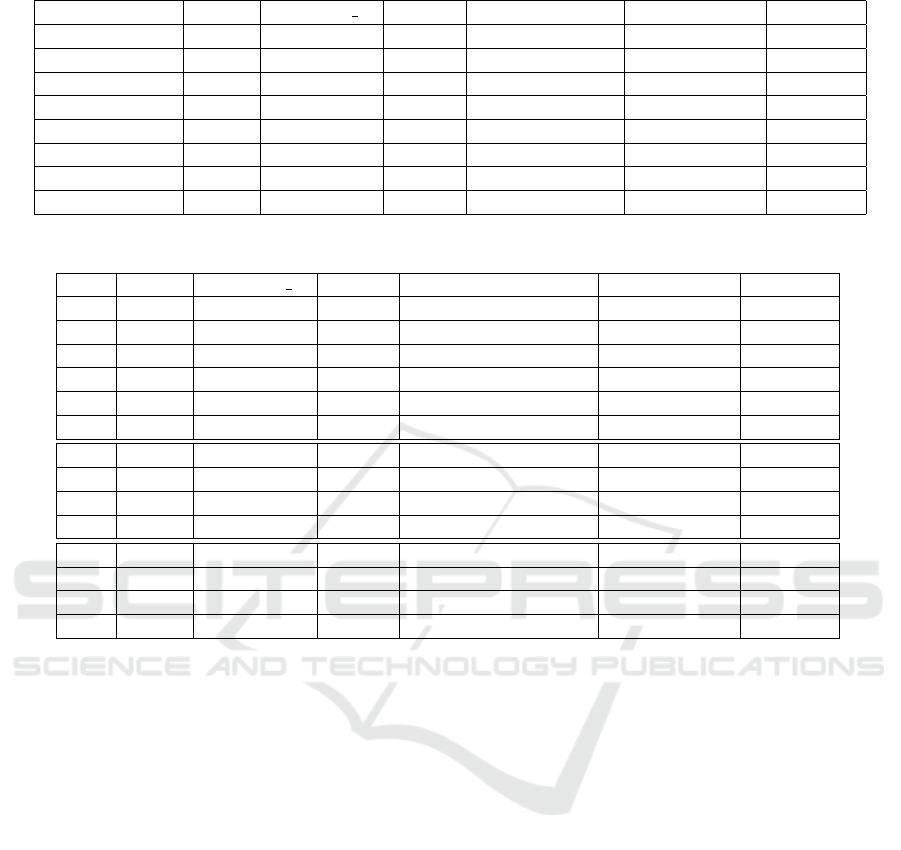
Table 3: MPJPE results of the combinations of improvements on STS-GCN-2D model, while also including some baselines.
Model Nodes #STGCN L Object Data train filter Data val filter MPJPE
Fixed position 17 - 7 - Original 13.94
STS-GCN-2D 17 4 7 Original Original 18.3462
STS-GCN-2D 17 4 3 Original Original 10.1618
STS-GCN-2D 17 4 3 Median 21 Original 12.6789
STS-GCN-2D 13 4 3 Median 21 Original 12.2306
STS-GCN-2D 13 2 3 Median 21 Original 12.8616
STS-GCN-2D 2 4 3 Median 21 Original 16.9668
STS-GCN-2D 2 2 3 Median 21 Original 16.8866
Table 4: MPJPE results of various combinations of STS-GCN-2D model trained on the floor and table dataset splits.
Nodes #STGCN L Object Data train filter Data val filter MPJPE
1 17 4 3 Full split Full split 10.1618
2 17 4 3 Full split Table split 10.1224
3 17 4 3 Full split Floor split 10.1845
4 13 4 3 Full split Full split 11.2891
5 13 4 3 Full split Table split 11.6197
6 13 4 3 Full split Floor split 11.0983
7 17 4 3 Table split Full split 17.5242
8 17 4 3 Floor split Full split 12.6189
9 13 4 3 Table split Full split 15.1431
10 13 4 3 Floor split Full split 12.8331
11 17 4 3 Median21 Table split Full split 15.5269
12 17 4 3 Median21 Floor split Full split 12.9247
13 13 4 3 Median21 Table split Full split 15.2879
14 13 4 3 Median21 Floor split Full split 12.9681
compared to the model with 17 joints. In the hands’
case (2 joints), the results did not improve as there is
too little information on the whole kinematic tree to
make a correct motion prediction of only the hands.
Custom Skeleton Configuration + Smoothing +
2 STGCN Layers. On the other hand, using two
STGCN layers has a factor when only considering
the hands. The reasoning here would be that these
2 joints are over-smoothed as each layer outputs a
weighted average of the neighboring joints. With 4
layers all the information of a specific node is van-
ished due to this smoothing effect. The MAD value
increased from 0.484 with four layers to 0.729 with
two layers which backs the hypothesis that there is
significantly more over-smoothing with four layers.
The hands’ case with improvements still performed
better than the original model with 17 joints and no
improvements, which is a first indicator that VR/AR
industrial use cases with motion prediction are fea-
sible. This is a good result as the MPJPE gives a
”per joint” error but when we only evaluate the hands’
joints which are the joints with the most movement in
an assembly task, it is difficult to compare the differ-
ent settings. Following this reasoning, the hands’ case
is the most difficult setting to perform well.
Figures 6 and 7 show qualitative results of the pre-
dicted sequences of different actions by the STS-GCN
model with object context, 2 STGCN layers, and
trained on the smoothed dataset.
6.4 Occlusions
To examine the effect of occlusions, the dataset is split
into two parts, one with a table in front of the subject
and one without a table. Table 4 shows the results
when only using these splits of the dataset, i.e. splits
where there is respectively a table (Table split) or not
(Floor split) in the assembly scene which can occlude
the lower part of the body and increase the noise in
the dataset. The models trained on the full data per-
formed similarly on the original, table, and floor val-
idation datasets. We can reason that the model is
robust to the occluded data samples. On the other
hand, the models trained on the floor dataset gener-
alize much better to the full dataset than the mod-
els trained on the table dataset with occlusions. The
largest improvement, when trained on the table split,
is observed when 13 nodes instead of 17 are used and
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
912
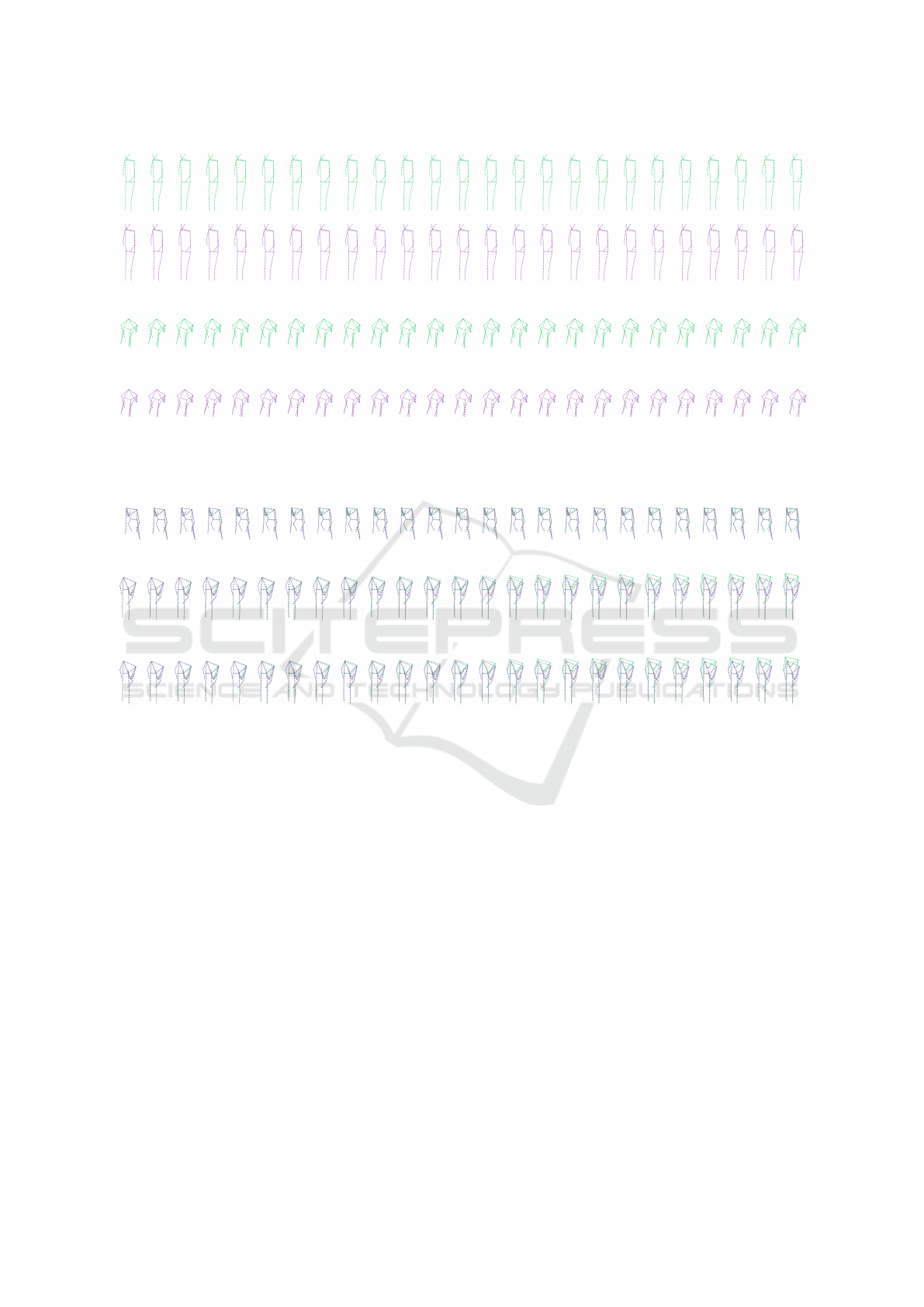
(a)
(b)
Figure 6: Separated prediction (purple) and ground truth (green) motion sequences of the action (a) ”spin leg’ and (b) ”attach
drawer side panel” by the STS-GCN-2D model with object context, trained on the smoothed IKEA-ASM dataset.
(a)
(b)
(c)
Figure 7: Prediction (purple) and ground truth (green) motion sequences of the action (a) ”spin leg’, (b) ”attach drawer
side panel”, and (c) ”attach drawer side panel” by the STS-GCN-2D model with object context, trained on the smoothed
IKEA-ASM dataset.
tested on the full dataset, which can be seen by com-
paring rows 7 and 9 in Table 4. Removing lower body
joints from the training samples boosts the data qual-
ity. This improvement is diminished when the train-
ing set is filtered with a Median 21 filter because then
the occluded lower body joint estimations are more
accurate and actually add information to the model.
With filtering, it is not opportune to remove the lower
body joints as input.
7 CONCLUSION AND FUTURE
WORK
We summarize our work on 2D motion prediction on
the IKEA-ASM dataset by the following modifica-
tions to the dataset and model. Pre-processing the
dataset to remove outliers and inconsistencies boosts
performance. We added object gaze information to
give more context to the body motion of the subject.
Over-smoothing of the GCN embeddings is decreased
by limiting the number of layers. Lastly, only using
the upper body joints improves the results as the lower
body pose estimations are error-prone.
Future work includes adding baselines mentioned in
the related work section to have stronger compar-
isons. The object gaze information is currently added
as an oracle but in certain use cases it is more realis-
tic to predict the active object given the raw video in-
puts, this problem is tackled in one of the MECCANO
dataset challenges (Ragusa et al., 2022). Adding an
active object detector is one of the possible future di-
rections that can be explored. With 3D human poses,
it is also possible to constrain the possible joint trajec-
tories with the physical constraints of the kinematic
Human Motion Prediction on the IKEA-ASM Dataset
913

tree as there are accurate angles and distances be-
tween nodes in 3D.
ACKNOWLEDGEMENTS
This research received funding from the Flemish Gov-
ernment (AI Research Program).
REFERENCES
Adeli, V., Adeli, E., Reid, I., Niebles, J. C., and Rezatofighi,
H. (2020). Socially and contextually aware human
motion and pose forecasting. IEEE Robotics and Au-
tomation Letters, 5(4):6033–6040.
Ben-Shabat, Y., Yu, X., Saleh, F., Campbell, D., Rodriguez-
Opazo, C., Li, H., and Gould, S. (2020). The ikea
asm dataset: Understanding people assembling furni-
ture through actions, objects and pose.
Butepage, J., Black, M. J., Kragic, D., and Kjellstrom, H.
(2017). Deep representation learning for human mo-
tion prediction and classification. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 6158–6166.
Chen, D., Lin, Y., Li, W., Li, P., Zhou, J., and Sun, X.
(2020). Measuring and relieving the over-smoothing
problem for graph neural networks from the topolog-
ical view. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 34, pages 3438–3445.
Chiu, H.-k., Adeli, E., Wang, B., Huang, D.-A., and
Niebles, J. C. (2019). Action-agnostic human pose
forecasting. In 2019 IEEE Winter Conference on Ap-
plications of Computer Vision (WACV), pages 1423–
1432. IEEE.
Diller, C., Funkhouser, T., and Dai, A. (2022). Forecast-
ing actions and characteristic 3d poses. arXiv preprint
arXiv:2211.14309.
Ghoddoosian, R., Dwivedi, I., Agarwal, N., Choi, C., and
Dariush, B. (2022). Weakly-supervised online action
segmentation in multi-view instructional videos. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 13780–
13790.
Gopalakrishnan, A., Mali, A., Kifer, D., Giles, L., and Oror-
bia, A. G. (2019). A neural temporal model for human
motion prediction. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Haresh, S., Kumar, S., Coskun, H., Syed, S. N., Konin, A.,
Zia, Z., and Tran, Q.-H. (2021). Learning by aligning
videos in time. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 5548–5558.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE International
Conference on Computer Vision (ICCV).
Hu, J., Fan, Z., Liao, J., and Liu, L. (2019). Predict-
ing long-term skeletal motions by a spatio-temporal
hierarchical recurrent network. arXiv preprint
arXiv:1911.02404.
Justusson, B. (1981). Median filtering: Statistical proper-
ties. Two-Dimensional Digital Signal Prcessing II,
pages 161–196.
Kwon, T., Tekin, B., Tang, S., and Pollefeys, M. (2022).
Context-aware sequence alignment using 4d skeletal
augmentation. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 8172–8182.
Li, Q., Chalvatzaki, G., Peters, J., and Wang, Y. (2021). Di-
rected acyclic graph neural network for human motion
prediction. In 2021 IEEE International Conference on
Robotics and Automation (ICRA), pages 3197–3204.
IEEE.
Liu, Z., Su, P., Wu, S., Shen, X., Chen, H., Hao, Y., and
Wang, M. (2021). Motion prediction using trajectory
cues. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 13299–13308.
Luo, W., Yang, B., and Urtasun, R. (2018). Fast and furi-
ous: Real time end-to-end 3d detection, tracking and
motion forecasting with a single convolutional net. In
Proceedings of the IEEE conference on Computer Vi-
sion and Pattern Recognition, pages 3569–3577.
Mart
´
ınez-Gonz
´
alez, A., Villamizar, M., and Odobez, J.-M.
(2021). Pose transformers (potr): Human motion pre-
diction with non-autoregressive transformers. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 2276–2284.
Mohamed, A., Chen, H., Wang, Z., and Claudel, C.
(2021). Skeleton-graph: Long-term 3d motion predic-
tion from 2d observations using deep spatio-temporal
graph cnns. arXiv preprint arXiv:2109.10257.
Nussbaumer, H. J. (1981). The fast fourier transform. In
Fast Fourier Transform and Convolution Algorithms,
pages 80–111. Springer.
Ragusa, F., Furnari, A., and Farinella, G. M. (2022). Mec-
cano: A multimodal egocentric dataset for humans be-
havior understanding in the industrial-like domain.
Sofianos, T., Sampieri, A., Franco, L., and Galasso, F.
(2021). Space-time-separable graph convolutional
network for pose forecasting. CoRR, abs/2110.04573.
Vendrow, E., Kumar, S., Adeli, E., and Rezatofighi, H.
(2022). Somoformer: Multi-person pose forecasting
with transformers. arXiv preprint arXiv:2208.14023.
Yuan, Y. and Kitani, K. (2020). Dlow: Diversifying latent
flows for diverse human motion prediction. In Euro-
pean Conference on Computer Vision, pages 346–364.
Springer.
Zhang, J., Liu, H., Chang, Q., Wang, L., and Gao, R. X.
(2020). Recurrent neural network for motion trajec-
tory prediction in human-robot collaborative assem-
bly. CIRP annals, 69(1):9–12.
Zhao, Z., Liu, Y., and Ma, L. (2022). Compositional action
recognition with multi-view feature fusion. Plos one,
17(4):e0266259.
Zheng, Y., Yang, Y., Mo, K., Li, J., Yu, T., Liu, Y.,
Liu, C. K., and Guibas, L. J. (2022). Gimo: Gaze-
informed human motion prediction in context. In Eu-
ropean Conference on Computer Vision, pages 676–
694. Springer.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
914
