
End-to-End Gaze Grounding of a Person Pictured from Behind
Hayato Yumiya
1
, Daisuke Deguchi
1
, Yasutomo Kawanishi
2
and Hiroshi Murase
1
1
Institute of Intelligent System, Nagoya University, Japan
2
RIKEN GRP, Japan
Keywords:
3D Human Posture, Gaze Grounding, Metric Learning, Person-to-Person Differences.
Abstract:
In this study, we address a novel problem with end-to-end gaze grounding, which estimates the area of an
object at which a person in an image is gazing, especially focusing on images of people seen from behind.
Existing methods usually estimate facial information such as eye gaze and face orientation first, and then
estimate the area at which the target person is gazing; they do not work when a person is pictured from behind.
In this study, we focus on individual’s posture, which is a feature that can be obtained even from behind.
Posture changes depending on where a person is looking, although this varies from person to person. In this
study, we proposes an end-to-end model designed to estimate the area at which a person is gazing from their
3D posture. To minimize differences between individuals, we also introduce the Posture Embedding Encoder
Module as a metric learning module. To evaluate the proposed method, we constructed an experimental
environment in which a person gazed at a certain object on a shelf. We constructed a dataset consisting of
pairs of 3D skeletons and gazes. In an evaluation on this dataset,HEREHEREHEREwe confirmed that the
proposed method can estimate the area at which a person is gazing from behind.
1 INTRODUCTION
Understanding the objects to which a person directs
their gaze plays an important role in understanding
human actions and intentions. The more a person is
attracted to an object, the more they may tend to fo-
cus their gazed on it. This information is important
in various applications, such as analyzing degrees of
interest in commercial products. For example, sup-
pose a customer is gazing at a certain product for an
extended period. We can therefore predict that the
customer may be interested in the product and may
be likely to do so. In this research, we refer to the
task of associating the area at which a person appears
to be gazing with an actual object in the real world as
gaze grounding. Many methods have been proposed
to estimate the area at which a person in an image is
gazing (Jha and Busso, 2018; Fridman et al., 2016).
Fridman et al. proposed a method to accurately es-
timate the area of a person’s attention by extracting
face orientations from images. However, these meth-
ods are typically ineffective in practice because cam-
eras may have a viewpoint situated behind the target
person. Also, in realistic situations such as in retail
stores, installing cameras to capture a person from a
view may be awkward or impractical. Therefore, peo-
ple in such camera images often stand with their backs
to the camera. In these cases, because their face can-
not be extracted from the image, the area at which
they are gazing cannot be estimated by existing meth-
ods. Additionally, most existing methods estimate a
heat map of the gaze area in the image, which does
not directly correspond to the actual object.
In this study, we address the problem of gaze
grounding, which estimates the gaze object area of
a person in an image, especially the person pictured
from behind. Humans can estimate where the person
is looking from the posture, even from behind. This
is the case because we know that posture changes de-
pending on where a person is looking. For example,
Figs. 1 (a) and (b) show examples of a person stand-
ing with their back to the camera. They show that
the posture changes depending on where the person
directs their gaze, with their head turning in different
directions or bending forward to observe lower ob-
jects. This inspired us to estimate the gaze area by
focusing on differences in postures. However, by an-
alyzing the postures more deeply, we found that con-
siderable differences between individuals in postures
even when looking at the same object from the same
location, as shown in Figs. 1 (b) and (c). This in-
dicates that these differences need to be compensated
898
Yumiya, H., Deguchi, D., Kawanishi, Y. and Murase, H.
End-to-End Gaze Grounding of a Person Pictured from Behind.
DOI: 10.5220/0011899900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
898-905
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Gaze Area
(a) Upper left (Person A).
Gaze Area
(b) Lower left (Person A).
Gaze Area
(c) Lower left (Person B).
Figure 1: Looking at one of the objects on a shelf.
for to estimate the area of the object at which a person
is gazing from their posture.
In this study, we propose an end-to-end method to
estimate the area of the object at which a person is
gazing from their posture while differences between
individuals. Here, human posture is defined as a set of
3D locations of body joints calculated by 3D pose es-
timation. In the proposed method, a posture is embed-
ded into a posture feature space. The feature space is
trained by deep metric learning to differentiate poses
if the gazed objects different while bringing even dif-
ferent persons close together in the feature space if
the objects of their gaze are the same. This empha-
sizes posture differences depending on the gaze tar-
get while minimizing person-to-person differences.
Then, a likelihood map associated with the scene is
generated from the embedded posture feature. By re-
ferring to the object location in the scene, the method
aggregates likelihoods within each target object re-
gion. Finally, the region with the highest likelihood
is selected as the region of the object of the person’s
gaze.
The contributions of this paper are as follows.
• We define the problem of gaze grounding for a
person pictured from behind.
• We propose a method to estimate the area of an
object at which a person is gazing from a camera
viewpoint located behind them. The method gen-
erates a likelihood map from posture information
and associates the map with regions of objects.
• We propose a deep feature embedding method
that can compensate for differences between in-
dividuals. This makes the distances between pos-
ture pairs of different persons looking at the same
target object close together.
• We provide a method to aggregate likelihood by
referring to object locations. This enables us to es-
timate gazed objects with good robustness to ob-
ject locations.
• We also propose an end-to-end training method
that jointly trains the deep feature embedding and
the likelihood-map generation model.
2 RELATED WORK
2.1 Gaze Estimation
Kellnhofer et al. (Kellnhofer et al., 2019) have pro-
posed a method of gaze estimation with a model
trained on images captured under various situations
and camera viewing directions. They constructed a
dataset called Gaze360 comprising indoor and out-
door videos captured by an omnidirectional camera
and annotated with 3D gaze directions. Because this
dataset contains a large number of individual persons,
it can be widely used to evaluate 3D gaze estimation
methods. The estimation accuracy was also improved
using multiple consecutive frames as input to a long
short-term memory (LSTM). However, this method
cannot be applied to estimate the gaze area of a per-
son with their back to the camera.
Nonaka et al. (Nonaka et al., 2022) focused on
the cooperativeness between gaze, head, and body,
and proposed a gaze estimation method using tem-
poral information of head position and posture. They
constructed a dataset with 3D annotations of gaze di-
rection on videos of multiple situations captured by
surveillance cameras, and modeled the gaze direction
likelihood distribution representing the relationships
between head and body postures. Here, a neural net-
work was used to represent the conditional distribu-
tion of gaze direction. This shows that 3D gaze can
be estimated even for scenes with considerable occlu-
sion. However, this method cannot estimate the 3D
gaze direction from a single frame because it requires
temporal information.
End-to-End Gaze Grounding of a Person Pictured from Behind
899

2.2 Gaze Estimation from the Behind a
Person
Bermejo et al. (Bermejo et al., 2020) proposed a
method to estimate gaze direction from the back of a
person’s head. Their method estimates the gaze direc-
tion using the head region detected by YOLO (Red-
mon and Farhadi, 2018) from a single frame captured
by a third-person view camera. In addition, they cre-
ated 3D models of various people and virtually gen-
erated images of a person pictured from behind in
various environments (varting elements such as light
source location, angle, camera distance, and so forth).
By using these images for training, they reduced the
estimation error caused by camera placement, angle,
lighting conditions, resolution, and so forth. Finally,
they achieved an estimation error of about 23 degrees
in the horizontal direction and 26 degrees in the ver-
tical direction, which is relatively accurate for esti-
mating gaze direction from behind. In contrast, it is
difficult to estimate the gaze area because the target
object cannot be accurately determined only by the
gaze direction.
2.3 Gaze Area Estimation from Posture
Information
Kawanishi et al. (Kawanishi et al., 2018) proposed
a method for estimating a gaze target using the pos-
ture of a person in an image. Based on the idea that
posture can vary relative to the gaze target, they esti-
mated the target at which a person was looking as a
classification problem into four areas on a book page
based on the person’s posture. Their results suggested
that the human posture can be used to estimate gaze
area. However, because this is a pre-defined classifi-
cation problem, all the target locations should be fixed
beforehand, and the system cannot estimate other tar-
gets.
2.4 Metric Learning
Metric learning is a method for constructing a fea-
ture space embedding that maps semantically identi-
cal data to nearby locations and semantically different
data to distant locations. A typical approach is to learn
a feature space embedding using anchor data, positive
data of the same class, and negative data of a differ-
ent class. Then, the model is trained so that the dis-
tance between the anchor data and the positive data is
smaller than the distance between the anchor data and
the negative data (Chopra et al., 2005; Wang et al.,
2017). In this study, by using this framework, we ob-
tain the embeddings that transform postures gazing at
the same area into close features in a feature space.
3 ESTIMATING GAZE OBJECT
AREA FROM BEHIND
To associate the gaze area with an actual object in
the real world, we propose an end-to-end method that
generates a likelihood map of the gaze area for a given
posture and aggregates likelihoods within each object
region to obtain object-wise likelihoods.
The method estimates the gazed object area from
behind a person using their posture. As may be ob-
served from seen in Fig. 1 (a), humans can easily esti-
mate that Person A is looking at the object located at
the upper left of the shelf. In addition, from the pos-
ture looking at the different areas (Figs. 1(a) and (b)),
we can observe that they have different characteristics
in terms of head orientation, bending of the hips and
legs, and so forth. These indicate that we usually take
a similar posture when looking at the same place and
vice versa. From this characteristic, we consider esti-
mating the gaze object area by focusing on differences
in posture, even from behind.
When we analyze the postures more deeply, as
shown in Figs. 1 (b) and (c), we can note some dif-
ferences between individuals. In the figure, a differ-
ent person is looking at an object placed at the lower
left; they are in different postures even though they
are looking at the same area. To compensate for these
differences, we introduce a deep metric learning tech-
nique into the Posture Embedding Encoder module.
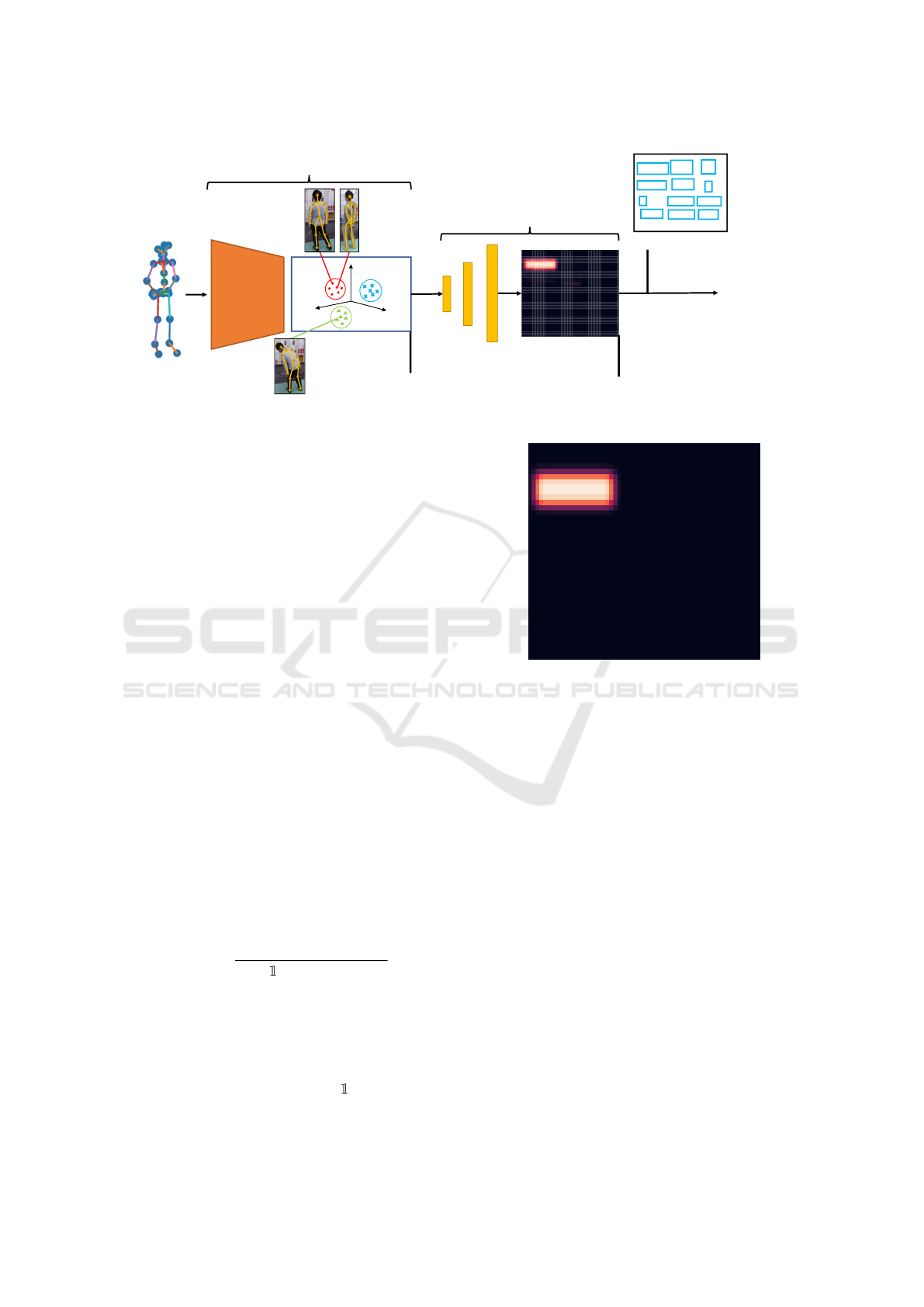
Fig. 2 shows an overview of the proposed method.
The neural network model consists primarily of two
parts, including a Posture Embedding Encoder mod-
ule and a Likelihood Map Generator module, fol-
lowed by a Likelihood Aggregation process. The neu-
ral network model is a combination of the Posture
Embedding Encoder module and the Likelihood Map
Generator module. The Posture Embedding Encoder
module is trained to compensate for the person-to-
person differences, while the Likelihood Map Gen-
erator module is trained to generate a likelihood map
from a posture. It is trained in an end-to-end man-
ner, which minimizes the sum L of the losses from the
Posture Embedding Encoder module L
e
and the Like-
lihood Map Generator module L
d
as given below.
L = L
e
+ L
d
. (1)
The Likelihood Aggregation process calculates the
object-wise gazed likelihood from the likelihood map
in reference to object locations.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
900
Encoder
3D posture
Lower
Left
Upper
Right
Upper
Left
embeddings
…
…
DeConv
Likelihood map
NTXentLoss(L
e
)
MSELoss(L
d
)
1
4
7
10
2
3
6
5
8
11
9
12
Object Region
reference
Obj.1 : 0.94
Obj.2 : 0.03
Obj.3 : 0.01
…
Posture Embedding Encoder Module
Likelihood Map Generator Module
Figure 2: The architecture of the proposed model.
3.1 Posture Embedding Encoder
Module
Based on the deep metric learning framework, we use
posture and gazed object area labels to learn the Pos-
ture Embedding Encoder h(·) that embeds a i-th pos-
ture p
i
into a posture feature space that can absorb the
person-to-person differences.
The ground truth labels of the gaze object area
are provided in the training data. Here, the labels are
IDs of the gaze target object regions. The encoder is
trained so that the distance between two posture fea-
tures is close if the labels are the same and farther
away if the labels are different. This enables us to
project postures into the embedding space that con-
trols for differences between individuals in the pos-
ture feature. The input of the encoder is 21 three-
dimensional coordinates of human joints that is, it is a
63-dimensional vector p
i
∈ R
63
. A posture is embed-
ded into a posture feature f
i
= h(p
i
) by the encoder.
Here, h(·) is implemented as multiple fully-connected
layers. In the scene, there are several objects that peo-
ple might be expected to gaze at. We assign object
IDs for each object and use them for the metric learn-
ing. Here, we use NTXentLoss, (Chen et al., 2020)
which can consider the multiple labels simultaneously
for L
e
. NTXextLoss for i-th sample is defined as
L
e
= − log
exp(f
i
· f
+
/τ)
∑
N
k=1
[i̸=k]
exp(f
i
· f
k
)/τ)
,
(2)
where f
i
, f
+
, and f
k
are vectors in feature embedding
space calculated from the input posture vectors by the
encoder. Here, f
+
is a vector of the same class as
f
i
in the mini-batch, and f
k
is a vector in the mini-
batch. This mini-batch is selected by Easy Positive
Triplet Mining. (Xuan et al., 2020)
[i̸=k]
∈ {0, 1} is
a function that outputs 1 if i ̸= k and 0 otherwise. The
Figure 3: An example of a ground-truth likelihood map
used in the training.
variable τ is a hyperparameter, and we use τ = 0.07 in
the experiment.
3.2 Likelihood Map Generator Module
This section describes the details of the likelihood
map generator corresponding to the gaze area likeli-
hood based on the embedded feature space.
The generator g(·) also consists of a neural net-
work comprising, fully connected layers followed by
inverse-convolutional (Deconvolution) layers. The in-
put of the generator is an embedded feature f
i
com-
puted by the encoder described in the previous sec-
tion, and the generator is trained to output a likelihood
map m
i
= g(f
i
) representing the gaze area likelihood
over the target space.
The ground truth likelihood map for the training
is prepared as follows. First, an image of the target
scene in 40 × 60 pixels, named object area map, is
prepared. Here, we assume that the target space is
a shelf containing multiple objects in a store. In an
object area map, pixels corresponding to a gazed ob-
ject in the space are filled with 1, and the remainder
End-to-End Gaze Grounding of a Person Pictured from Behind
901

Figure 4: Example of dataset acquisition setting.
of the pixels are filled with 0. To make the output of
the inverse-convolution (Deconvolution) network be a
square size (equal height and width), the object area
map is extended to 64 × 64 pixels with zero padding.
A Gaussian filter (σ = 3) is then applied to the object
area map to get smooth contours. Figure 3 shows an
example of the heat map created as the target.
For the training, the loss L
d
is a mean squared er-
ror (MSE) between an estimated map and a ground-
truth map. The loss for i-th sample is calculated as
L
d
= MSE(m
i
,
b
m
i
) (3)
=
1
K
2
K
2
∑
j=1
(y
i j
− ˆy
i j
)
2
y
i j
∈ m
i
,
b
y
i j
∈
b
m
i
,
where
b
m
i
is the ground-truth map corresponding to
the i-th input. Here, the size of a likelihood map was
K × K, and K = 64 is used in the experiment.
3.3 Likelihood Aggregation Process
In this section, we describe the details of the likeli-
hood aggregation process from the estimated likeli-
hood map.
The gaze target object region is determined from
the likelihood map generated by Likelihood Map
Generator Module described above, by referring to
the object area map. For each object region, the av-
erage likelihood within the object region is computed
from the likelihood map. Then, the area having the
highest average likelihood is selected as the gazed ob-
ject area.
Figure 5: Example of object placement on the shelf.
4 EXPERIMENTS
We evaluated the performance of the proposed
method. To do so, we constructed a new dataset as
described below.
4.1 Dataset
The purpose of this study was to estimate the gaze
area at which a person is gazing from behind using the
3D coordinates representing a human posture. How-
ever, no datasets are publicly available for this task.
Therefore, we constructed a new dataset consisting of
3D human postures and their corresponding gaze area
annotations.
First, we describe the details of data acquisition
setting. In the dataset acquisition process, we simu-
lated a situation in which a surveillance camera cap-
tures a person looking at one of the objects on a shelf
in a convenience store. Figure 4 shows the data acqui-
sition environment that we prepared for capturing a
person looking at one of the objects on the shelf from
a specified position. The size of the shelf is 120 cm
height × 180 cm width, and it is divided into 12 areas
where each size is 30 cm height × 60 cm width.
We put several types of target objects on the shelf
such as plastic bottles, cans, books, and paper cartons.
There are several kinds of cans and bottles; one type
of object is placed in each area. Fig. 5 shows the shelf
that we used in the dataset acquisition. We added
annotations of the object area as follows. First, the
objects are grouped into 12 groups. The 12 regions
corresponding to 12 groups of objects, on the shelf
were annotated as segmented regions. Even for the
multiple objects of the same type is in each segment,
we consider these segments as object areas. These 12
object areas were used as the ground truth(GT) corre-
sponding to the postures of the training data.
The subjects were standing 0.5 m away from the
shelf to see each object. The data were collected from
seven participants in the experiment (one female and
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
902

Table 1: Results of correct answer rate and estimation error.
Correct answer rate
Method
Top-1 (%) ↑ Top-2 (%) ↑ Top-3 (%) ↑
Estimation Error (m) ↓
Proposed 34.26 55.02 66.13 0.33
six males). Here, we used Azure Kinect to capture
images, and their resolutions were 1, 280 × 720 pix-
els and the frame rate was 15 fps. The 3D posture in
Azure Kinect is originally composed of 32 3D skele-
tal coordinates. When the target person image is taken
from behind, the nose, eyes, thumbs, and ears are dif-
ficult to estimate accurately by occlusion, so these
joints were not used. In this dataset, 3d postures were
composed of 21 3D skeletal coordinates.
Through this data acquisition process, a total of
15,228 frames were collected as a dataset.
4.2 Experimental Settings
A summary of the proposed method is proposed as
follows.
Propose Method
First, the proposed encoder module is applied to
posture (3D coordinates of human joints) to obtain
posture features in the feature space. Then, de-
convolutional neural network is applied to the em-
bedded features to reconstruct a likelihood map
corresponding to the subject’s gaze area. Finally,
object-wise likelihoods are aggregated for every
object region referring to object locations.
Here, we used five fully-connected layers for the
encoder, which output a 4-dimensional vector f ∈ R
4
from a 63-dimensional vector p. As a metric learning
framework, Easy Positive Triplet Mining (Xuan et al.,
2020) was used for sampling triples from the training
data.
For the Likelihood Map Generator, we used 6
fully connected layers and 3 convolutional transpose
layers, and the sigmoid activation function was ap-
plied to the output layer to restrict the output values
within the range [0, 1].
For training the entire network, we used the
AdamW (Loshchilov and Hutter, 2017) optimizer
with the loss L defined in equation (1).
Experiments were conducted in a cross-validation
scheme and the dataset was split with six of the seven
participants as training data and one as testing data.
An evaluation was performed using the following two
evaluation metrics. The first was the correct answer
rate corresponding to how much the method was able
to correctly estimate the gazed object from the 12 ar-
eas on the shelf. In the proposed method, the aver-
age likelihood for each object was calculated, and the
highest one is selected. We evaluated whether the ob-
ject with the highest value was the same as the GT,
which we refer to as the Top-1 correct answer rate.
Also, we evaluated whether the correct answer can be
achieved within the 2nd highest and 3rd highest ar-
eas, referred to as Top-2 and Top-3 rates of correct
answers, respectively.
The second evaluation metric is an estimation er-
ror that is the average of Euclidean distances between
a center point of the area with the highest value and
the GT area.
4.3 Results and Discussions
Fig. 6 (c), Fig. 7 (c) show the likelihood map gener-
ated by the proposed method from postures captured
by Azure Kinect. Table 1 shows the average correct
answer rate evaluated via cross-validation by the pro-
posed method. From the Table 1, Top-1 correct an-
swer rate was 34.26%. This is a better result than 8%
chance rate of considering this problem as a 12-class
classification problem. In addition, the estimation er-
ror was 0.33 m, and it may be considered that even
when the estimation failed, it is often estimated in the
neighborhood of the correct answer. From these re-
sults, it may be considered say that it is possible to
end-to-end method was able to estimate the gaze area
from the posture.
4.4 Ablation Study
To investigate the effectiveness of the Posture Em-
bedding Encoder module, an ablation study was con-
ducted with a model designed to estimate the likeli-
hood map from the posture without the Encoder.
A summary of the model’s characteristics is pro-
vided below.
Ablated Model
A deconvolutional neural network was directly
applied to the posture feature (3D coordinates of
human joints) to reconstruct a likelihood map cor-
responding to the subject’s gaze area. The number
of parameters in this model was adjusted as in the
proposed model.
Table 2 shows the estimation results between the
proposed method and the ablated model. We observed
End-to-End Gaze Grounding of a Person Pictured from Behind
903
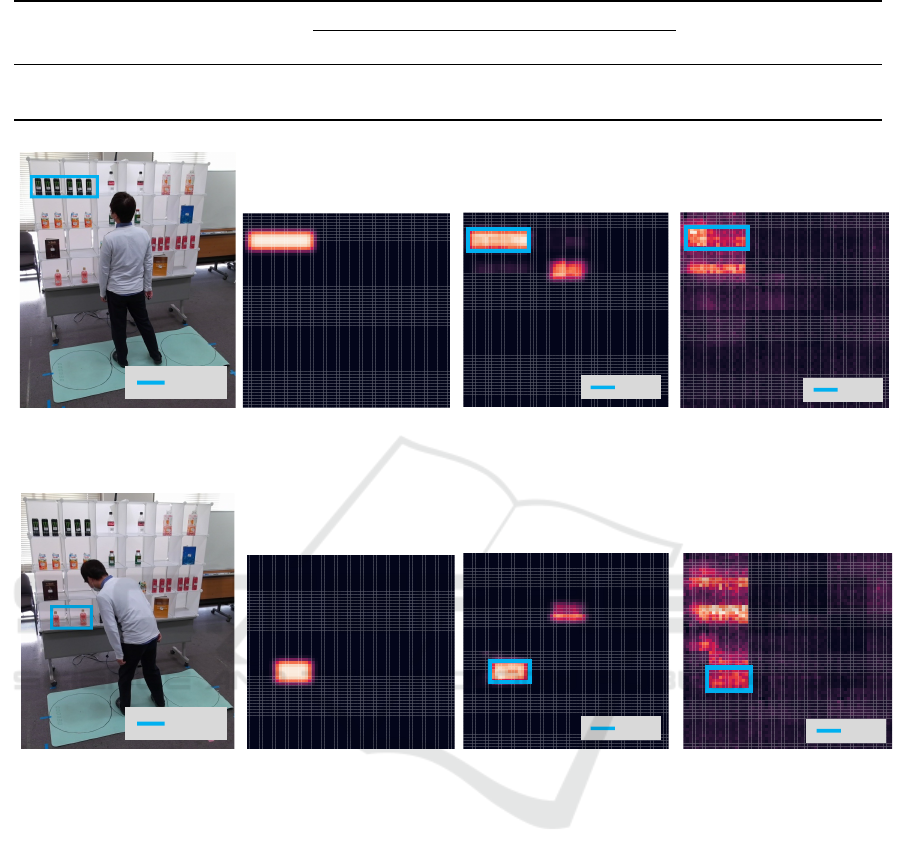
Table 2: Results of correct answer rate and estimation error.
Correct answer rate
Model Encoder Module
Top-1 (%) ↑ Top-2 (%) ↑ Top-3 (%) ↑
Estimation Error (m) ↓
Ablated model - 20.94 39.02 52.38 0.47
Full model ✓ 34.26 55.02 66.13 0.33
Trut h
(a) looking upper-left (b) Ground Truth
Tru t h
(c) Full model
Tru t h
(d) Ablated model
Figure 6: Result of a likelihood map estimated for person A looking at upper-left.
Trut h
(a) looking lower-left (b) Ground Truth
Tru t h
(c) Full model
Tru t h
(d) Ablated model
Figure 7: Result of a likelihood map estimated for person A looking at lower-left.
that the ablated model that estimated the likelihood
map without posture embedding showed a reduced
Top-1 correct answer rate by 13.32 points and estima-
tion error by 0.14 meters compared to the proposed
method, and Top-2 and Top-3 correct answer rates
were also greatly decreased. This indicates that the
area with the highest average likelihood selected by
the ablated model was located far from the GT area.
In addition, as shown in the generated likelihood
maps of Figs. 6 (c) and 6 (d), it may be observed that
the distribution in the generated likelihood map by the
full model was smaller than that of the ablated model.
Fig. 8 show t-SNE visualization of the feature
space embedding by the proposed encoder module.
As shown in the figure, each class was clearly sepa-
rated and embedded in the feature space.
These results suggest that the ablated model was
strongly affected by the ambiguity of the gaze area
caused by individual differences in posture. On the
other hand, the proposed method can reduce this am-
biguity by estimating a likelihood map using a fea-
ture embedding space constructed to compensate for
differences between people, the proposed method can
stably generate a likelihood map and improve the es-
timation accuracy by controlling for these variations.
5 CONCLUSIONS
In this study, we have addressed a problem of end-
to-end gaze grounding, especially targeting a person
pictured from behind. We have proposed an end-to-
end method to estimate the gaze object from a posture
of the person by referring to the object locations.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
904

Figure 8: Visualization of embedded feature space by t-
SNE. Each color corresponds to each gaze area.
In the proposed method, the 3D coordinates of
body joints are first projected into a constructed fea-
ture embedding space to compensate for differences
between individuals. The gaze area likelihood map is
generated from the embedded features using a decon-
volutional neural network. The likelihood is averaged
within each object area by referring to the object lo-
cations, and object-wise likelihoods are calculated.
To confirm the effectiveness of the proposed
method, we constructed a new dataset consisting of
3D coordinates of body joints and a target area to
which a person directed their gaze, and experiments
were conducted using this dataset. The experimental
results showed that the proposed approach was able
to estimate the gaze area from the posture, and the
encoder module serves an important function in the
performance role of the proposed model.
REFERENCES
Bermejo, C., Chatzopoulos, D., and Hui, P. (2020). Eye-
shopper: Estimating shoppers’ gaze using cctv cam-
eras. In Proceedings of the 28th ACM International
Conference on Multimedia, pages 2765–2774.
Chen, T., Kornblith, S., Norouzi, M., and Hinton, G. (2020).
A simple framework for contrastive learning of visual
representations. In Proceedings of the 37th Interna-
tional conference on machine learning, pages 1597–
1607. ICML.
Chopra, S., Hadsell, R., and LeCun, Y. (2005). Learn-
ing a similarity metric discriminatively, with applica-
tion to face verification. In Proceedings of the 2005
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition (CVPR’05), volume 1,
pages 539–546. IEEE.
Fridman, L., Langhans, P., Lee, J., and Reimer, B. (2016).
Driver gaze region estimation without use of eye
movement. IEEE Intelligent Systems, 31(3):49–56.
Jha, S. and Busso, C. (2018). Probabilistic estimation of the
gaze region of the driver using dense classification. In
Proceedings of the 21st International Conference on
Intelligent Transportation Systems (ITSC), pages 697–
702. IEEE.
Kawanishi, Y., Murase, H., Xu, J., Tasaka, K., and Yanagi-
hara, H. (2018). Which content in a booklet is he/she
reading? reading content estimation using an indoor
surveillance camera. In 2018 24th International Con-
ference on Pattern Recognition (ICPR), pages 1731–
1736. IEEE.
Kellnhofer, P., Recasens, A., Stent, S., Matusik, W., and
Torralba, A. (2019). Gaze360: Physically uncon-
strained gaze estimation in the wild. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 6912–6921.
Loshchilov, I. and Hutter, F. (2017). Decoupled weight de-
cay regularization. arXiv preprint arXiv:1711.05101.
Nonaka, S., Nobuhara, S., and Nishino, K. (2022). Dynamic
3D gaze from afar: Deep gaze estimation from tempo-
ral eye-head-body coordination. In Proceedings of the
2022 IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 2192–2201.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Wang, J., Zhou, F., Wen, S., Liu, X., and Lin, Y. (2017).
Deep metric learning with angular loss. In Proceed-
ings of the 16th IEEE International Conference on
Computer Vision, pages 2593–2601.
Xuan, H., Stylianou, A., and Pless, R. (2020). Improved
embeddings with easy positive triplet mining. In Pro-
ceedings of the 2020 IEEE/CVF Winter Conference on
Applications of Computer Vision, pages 2474–2482.
End-to-End Gaze Grounding of a Person Pictured from Behind
905
