
Generalized Torsion-Curvature Scale Space Descriptor for
3-Dimensional Curves
Lynda Ayachi, Majdi Jribi and Faouzi Ghorbel
CRISTAL Laboratory, GRIFT Research Group, Ecole Nationale des Sciences de l’Informatique (ENSI),
La Manouba University, 2010, La Manouba, Tunisia
Keywords:
3D Curve Description, Invariant 3D Descriptor, Space Curves.
Abstract:
In this paper, we propose a new method for representing 3D curves called the Generalized Torsion Curvature
Scale Space (GTCSS) descriptor. This method is based on the calculation of curvature and torsion measures
at different scales, and it is invariant under rigid transformations. To address the challenges associated with
estimating these measures, we employ a multi-scale technique in our approach. We evaluate the effectiveness
of our method through experiments, where we extract space curves from 3D objects and apply our method to
pose estimation tasks. Our results demonstrate the effectiveness of the GTCSS descriptor for representing 3D
curves and its potential for use in a variety of computer vision applications.
1 INTRODUCTION
In the field of computer vision, the ability to accu-
rately describe curves is essential for numerous ap-
plications, including object recognition, image seg-
mentation, motion estimation, and tracking. In two-
dimensional images, contours can be represented as
two-dimensional curves. Over the years, a variety of
methods and techniques have been developed for de-
scribing these curves in a concise and effective man-
ner. These curve descriptors are essential for many
computer vision tasks, as they enable the extraction
of useful information from images and enable algo-
rithms to better understand the shape and structure of
objects within an image. Two categories of methods
have been proposed in the literature: global and local.
These terms refer to the scope of the features that are
extracted from contours. Global methods typically
focus on extracting high-level, overall characteristics
of the contour, such as its length or overall shape.
Local methods, on the other hand, focus on extract-
ing more detailed, fine-grained features that capture
the local structure of the contour, such as the angles
between adjacent points or the curvature at different
points along the contour. These two types of methods
have different strengths and weaknesses, and they are
often used in combination to achieve the best perfor-
mance in contour description and analysis tasks. In
the global set of algorithms, there are several meth-
ods that have been applied to the task of contour de-
scription. One such method is the Fourier descrip-
tor, which has been used in a number of works, in-
cluding (Persoon and Fu, 1977) and (Ghorbel, 1998).
These methods focus on extracting global features
of contours, but other methods have been developed
that focus on local features instead. For example, the
method proposed in (Hoffman and Richards, 1984)
partitions the curve into segments at points of neg-
ative curvature, which improves the performance of
object recognition. In a more recent work, (Yang and
Yu, 2018) introduces a multiscale Fourier descriptor
that is based on triangular features. This method com-
bines global and local features, addressing the limita-
tions of existing Fourier descriptors in terms of lo-
cal shape representation. Triangle area representation
(TAR) is a multi-scale descriptor that was introduced
in (Alajlan et al., 2007). It is based on the signed ar-
eas of triangles formed by boundary points at differ-
ent scales. Another multiscale approach is the Angle
Scale Descriptor, which was proposed in (Fotopoulou
and Economou, 2011) and is based on computing
the angles between points of the contour at different
scales. In (Sebastian et al., 2003), a method called
Curve Edit was proposed that characterizes the con-
tour using two intrinsic properties: its length and the
variations in its curvature. This method has been used
for contour registration and matching. Another no-
table method is the Shape Context algorithm, which
was introduced in (Belongie et al., 2002). (Pedrosa
et al., 2013) introduced the Shape Saliences Descrip-
tor (SSD), which is based on the identification of
points of high curvature on the contour. These points,
known as salience points, are represented using the
relative angular position and the curvature values at
Ayachi, L., Jribi, M. and Ghorbel, F.
Generalized Torsion-Curvature Scale Space Descriptor for 3-Dimensional Curves.
DOI: 10.5220/0011895500003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 185-190
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
185

multiple scales. Another well-known local descriptor
is the Curvature Scale Space (CSS), which was intro-
duced in (Mokhtarian et al., 1997). This descriptor is
obtained by extracting the zero-crossing points of the
smoothed contour parameterizations using a series of
Gaussian functions at different scales. In , a simi-
lar approach is used, but the extrema of the Gaussian
functions are extracted instead of the zero-crossing
points. This type of descriptor has been widely used
in tasks such as shape retrieval, classification, and
analysis, due to its good performance, robustness, and
compactness. In (BenKhlifa and Ghorbel, 2019), this
descriptor is extended to the three-dimensional case,
and the GCSS (Generalized Curvature Scale Space)
descriptor is introduced, which considers an invariant
feature on curve points with a given level of curvature.
This type of descriptor has been shown to be effective
for representing also for 3D curves. Another notable
approach for representing 3D curves is the Torsion
Scale Space representation, which was introduced by
(Yuen et al., 2000). This descriptor is based on the
torsion information of the curve, which is a local mea-
sure of its non-planarity. Geometrically, space curves
that lie on the surface of 3D objects contain valuable
information about the shape and structure of those
surfaces. (Burdin et al., 1992) proposed a method for
extracting 3D primitives, such as long bones, using
a set of 2D Fourier descriptors. This set of descrip-
tors is shown to be stable, complete, and endowed
with geometrical invariance properties. In a recent
work, (Jribi et al., 2021) introduced a novel invariant
3D face description that is invariant under the SE(3)
group. This description is based on the construction
of level curves of the three-polar geodesic represen-
tation, followed by geometric arc-length reparameter-
ization of each level curve. The principal curvature
fields are then computed on the sampled points of this
three-polar parameterization.
In this paper, we introduce a new descriptor for
3D curves called the Generalized Torsion Curvature
Scale Space (GTCSS). This descriptor is based on
the calculation of curvature and torsion measures at
different scales. According to the second fundamen-
tal theorem of geometry (Friedrich, 2002), this pair
of measures is invariant under rigid transformations.
This means that two different space curves that have
the same values of curvature and torsion should have
the same shape. In the next section, we present the
mathematical formulation of the GTCSS descriptor,
and we demonstrate its effectiveness through empiri-
cal results.
2 GENERALIZED CURVATURE
TORSION SCALE SPACE
Let Γ(u) be a parameterization of the space curve Γ.
It is a function of a continuous parameter u defined
by:
Γ : [0,1] → R
3
u 7→ [x(u),y(u),z(u)]
T
(1)
Where [x(u),y(u),z(u)] are the geometric coordinates
of the curve points. It is important to note that the
parameterization of the curve is not unique because
it depends upon the starting point and the speed we
go over the curve. To get rid of this problem, the arc
length reparameterization is generally chosen as a so-
lution since it is invariant under Euclidean transfor-
mations. For a curve Γ, the arc length parameteriza-
tion is formulated as follows:
Γ
∗
(s) =
x
ϕ
−1
(s)
,y
ϕ
−1
(s)
,z
ϕ
−1
(s)
T
(2)
Where ϕ
−1
(s) represents the inverse of the arc length
function defined as:
ϕ(u) = s(u) −s(0) =
Z
u
0
d (Γ(u))
du
du (3)
Let denote by Γ
σ
the smoothed curve for a fixed
scale σ and κ(s, σ) and τ(s,σ) its curvature and tor-
sion :
κ(s,σ) =
√
(¨z
σ
˙y
σ
−¨y
σ
˙z
σ
)
2
+( ¨x
σ
˙z
σ
−¨z
σ
˙x
σ
)
2
+( ¨y
σ
˙x
σ
−¨x
σ
˙z
σ
)
2
(
˙x
2
σ
+ ˙y
2
σ
+˙z
2
σ
)
3
2
(4)
τ(s,σ) =
˙x
σ
( ¨y
σ
˘z
σ
−¨z
σ
˘y
σ
)−˙y
σ
( ¨x
σ
˘z
σ
−¨z
σ
˘x
σ
)+˙z
σ
( ¨x
σ
ˇy
σ
−¨y
σ
¨x
σ
)
( ˙y
σ
¨z
σ
−˙z
σ
¨y
σ
)
2
+(˙z
σ
¨x
σ
−˙x
σ
¨z
σ
)
2
+( ˙x
σ
¨y
σ
−˙y
σ
¨x
σ
)
2
(5)
Let a be a substitution of x,y and z. The notation
˙a
σ
, ¨a
σ
and ˘a
σ
stands for respectively the first, second
and third derivative of a in scale σ, expressed in equa-
tion(6):
˙a
σ
(s) = a(s) ⊗ ˙g(s,σ),
¨a
σ
(s) = a(s) ⊗ ¨g(s,σ),
˘a
σ
(s) = a(s) ⊗ ˘g(s,σ)
(6)
Where g is a gaussian function.
Once the curvature and torsion functions of the
smoothed curve are obtained, the next step corre-
sponds to the extrema extraction and the thresholding.
Extrema, that have significant curvature and torsion
variations in the sense of shape information, are ex-
tracted. The number of extrema decreases after each
gaussian convolution and the space curve becomes
smoother as illustrated in Figure 1.
Therefore, a thresholding is performed in order to
eliminate local extrema that have low absolute curva-
ture and torsion variations. Curvature extrema that are
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
186
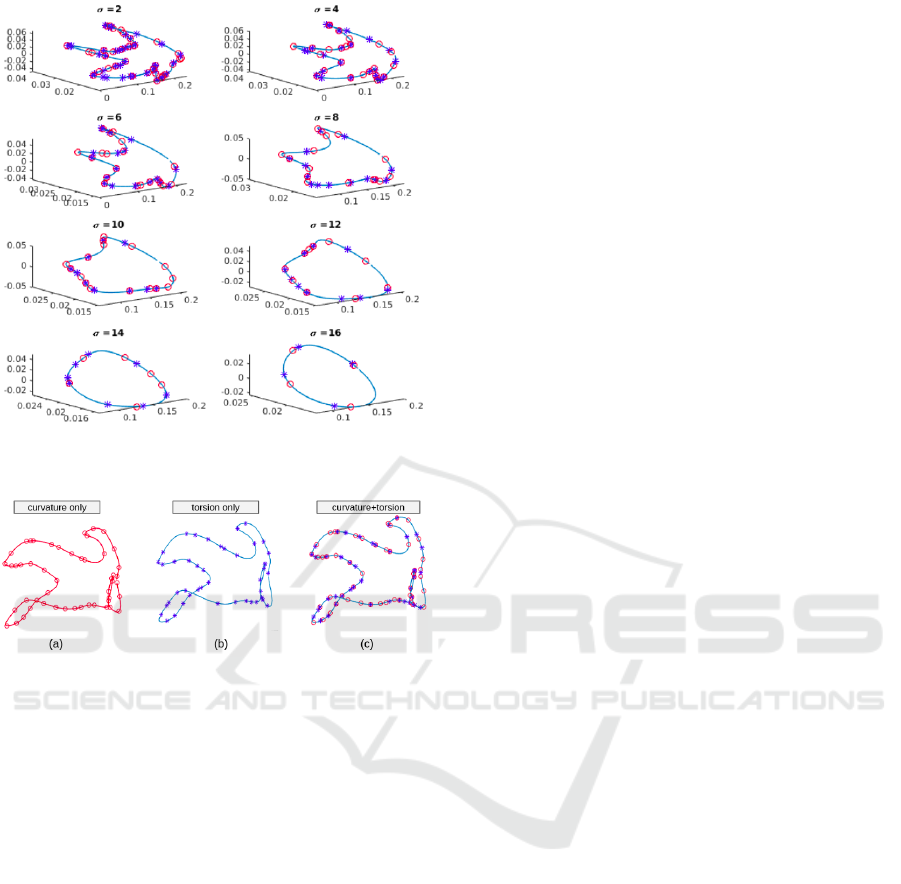
Figure 1: An example of a space curve in different levels of
smoothing, from σ = 2 to σ = 16.
Figure 2: (a) The curvature keypoints (b) The torsion key-
points (c) The curvature and torsion keypoints.
higher than the threshold ε
κ
are kept in the set Ω
σ
(ε
κ
)
which can be formulated as follows:
Ω
σ
(ε
κ
) =
{
κ ∈ Ω
σ
;|κ| > ε
κ
}
(7)
The torsion extrema that are higher than the threshold
ε
τ
are kept in θ
σ
(ε
τ
)
θ
σ
(ε
τ
) =
{
τ ∈ θ
σ
;|τ| > ε
τ
}
(8)
The next step is the generalization part. It con-
sists on seeking points of the curve having the same
curvature values as the set Ω
σ
and the same torsion
values as the set θ
σ
. The objective of this step is the
enrichment of the point set. It allows reaching areas
that are not selected in the previous steps but having
the same level of interest (same curvature and torsion)
as the extracted points of interest. Reciprocal images
are described as follows:
κ
−1
σ
(Ω
σ
(ε
κ
)) =
{
s ∈ [0,1] /κ
σ
(s) ∈ Ω
σ
(τ)
}
(9)
τ
−1
σ
(θ
σ
(ε
τ
)) =
{
s ∈ [0,1] /τ
σ
(s) ∈ θ
σ
(τ)
}
(10)
The previous steps are repeated a number of times
chosen empirically. The selected points at each scale
σ are stored, respectively, in F
κ
(σ) and F
τ
(σ). They
can be described as follows:
F
κ
(σ) =
Γ(s,σ) /s ∈ κ
−1
σ
{
Ω
σ
(ε
κ
)
}
(11)
F
τ
(σ) =
Γ(s,σ) /s ∈ τ
−1
σ
{
θ
σ
(ε
θ
)
}
(12)
3 EXPERIMENTATIONS AND
RESULTS
In this section, we evaluate the performance of our
proposed method on 3D object datasets. As there are
currently no datasets available for space curves, we
generate them from widely used 3D object datasets in
order to validate our approach. The method we use for
extracting space curves from 3D objects allows us to
evaluate the performance of the GTCSS descriptor in
terms of pose retrieval. We demonstrate the effective-
ness of our method on simple pose estimation tasks,
and compare its performance to existing state-of-the-
art methods.
3.1 Dataset
The experiments in this paper were conducted on the
3DBodyTex dataset (Saint et al., 2018), which con-
tains 400 high-resolution 3D scans of 200 different
subjects. The subjects are captured in at least two
poses: the ”U” pose and another random pose belong-
ing to a fixed set of 35 poses. The dataset provides
a useful benchmark for evaluating the performance of
our proposed method on human pose estimation tasks.
(Saint et al., 2018). The Figure 3 illustrates some ex-
amples of the dataset.
3.1.1 Space Curves Extraction
Our idea involves generating space curves from three-
dimensional objects, on which we then apply our
GTCSS descriptor. In this work, we focus on acquisi-
tions of the human body. To create a space curve for
a given object, we take the following steps:
• Identify a set of landmarks on the object, located
on the head, shoulders, elbow, wrist, hips, knees,
and ankles.
• Connect each pair of successive landmarks with a
geodesic line, as shown in Figure 5.
• Concatenate all of the geodesic lines to create the
final space curve for the object.
The obtained 3D curve accurately represents the
shape of M and captures its global morphological
variations. As a result, it can be used for pose recog-
nition, as it lies on mobile areas of the body.
Generalized Torsion-Curvature Scale Space Descriptor for 3-Dimensional Curves
187
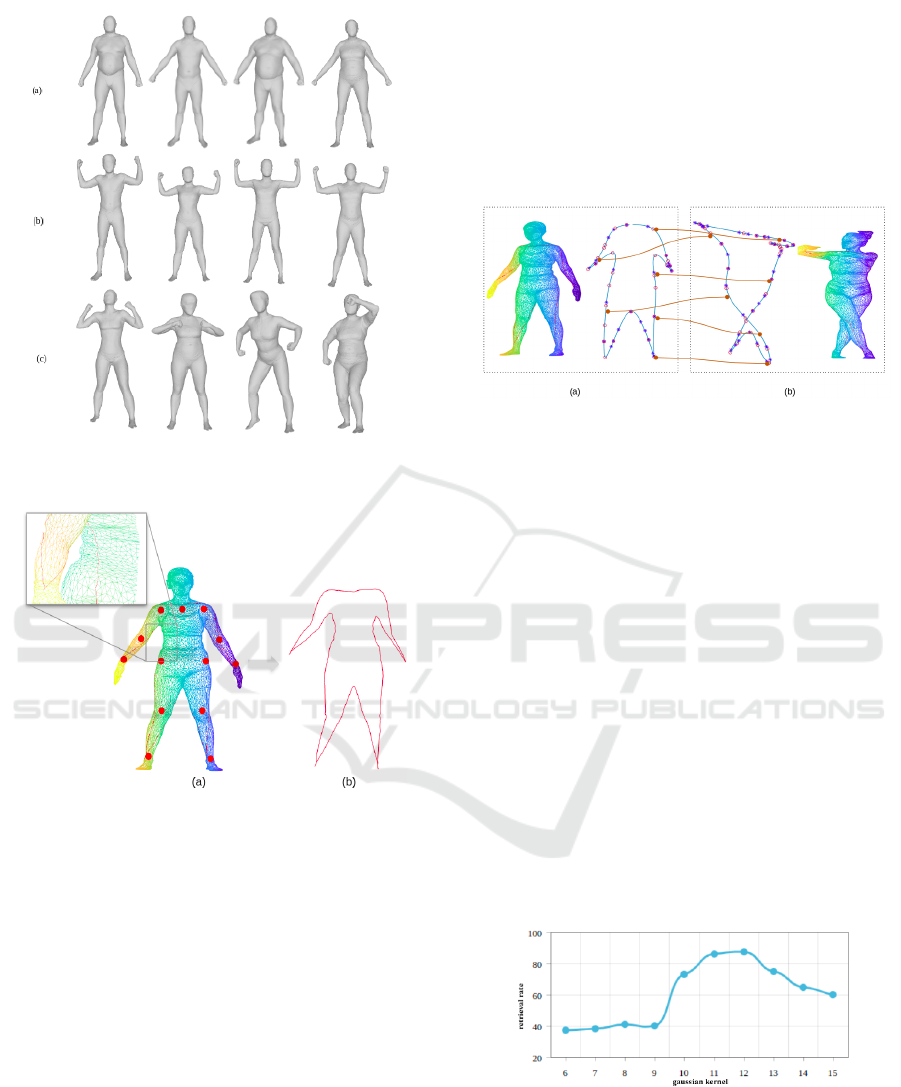
Figure 3: Samples from the 3DBodyTex dataset: (a) ”A”
pose, (b) ”U” pose, (c) random pose.
Figure 4: (a) Spots in red, the chosen landmarks (b) Space
curve generation.
3.2 Similarity Metric
Let π(σ) be the set of points, represented by their ar-
clength parametrization, and obtained by concatenat-
ing F
κ
(σ) and F
κ
(σ), as illustrated in Figure 2 and
expressed in the following equation:
π(σ) = F
κ
(σ) ∪F
τ
(σ) (13)
As a similarity metric, we employ the Dynamic
Time Warping (DTW) distance developed by Sankoff
aat al. (Sankoff and Kruskal, 1983) to compare 3D
curve descriptors as illustrated in Figure 5. As stated
in (Ratanamahatana and Keogh, 2004), the proposed
representation generates a pseudo time series, and
the DTW guarantees an invariance relatively to the
initial point. Let A and B be two space curves of
length N
A
and N
B
respectively, and represented by
two signatures S(A) =
{
S (a
1
),S(a
2
)...S (a
N
A
)
}
and
S(B) =
{
S (b
1
),S(b
2
)...S (b
N
B
)
}
. The path that min-
imizes the cumulative distance between these two se-
ries represents the distance between them and denoted
by D(S (a
i
),S(b
i
)) :
D(S(a
i
),S (b
j
)) = min
D(S(a
i
),S (b
j−1
))
D(S(a
i−1
),S (b
j
))
D(S(a
l−1
),S (b
j−1
))
+ D (S (a
i
),S (b
j
))
(14)
Figure 5: The comparaison process between two models
with different poses.
3.3 Results
We apply our method to each model in the dataset,
using the GTCSS description of each object. To de-
termine the optimal scale, we perform a study to
compute the retrieval rate using a gaussian kernel,
as shown in Figure 6. We experimentally set the
thresholds for the curvature and torsion measures to
be ε
κ
= 10
−2
and ε
τ
= 10
−3
, respectively, in order to
eliminate points with very low curvature and torsion.
The curvature and torsion of the obtained curves vary
significantly. For example, a human body in a running
pose will have varying curvature and torsion values in
the arms and legs, and almost zero values elsewhere.
In contrast, a human body in a standing position (or A
pose) will have mostly monotonous or zero curvature
and torsion values. Figure 7 demonstrates the utility
of the combination of curvature and torsion measures
for pose estimation.
Figure 6: Dependency of the retrieval rates and the gaussian
kernel.
Our approach is evaluated in terms of pose re-
trieval. We use the k-nearest neighbor (kNN) algo-
rithm with k=1 to obtain the scores of the pairwise
shape matching. For each model, we compute the dy-
namic time warping (DTW) distance using a super-
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
188
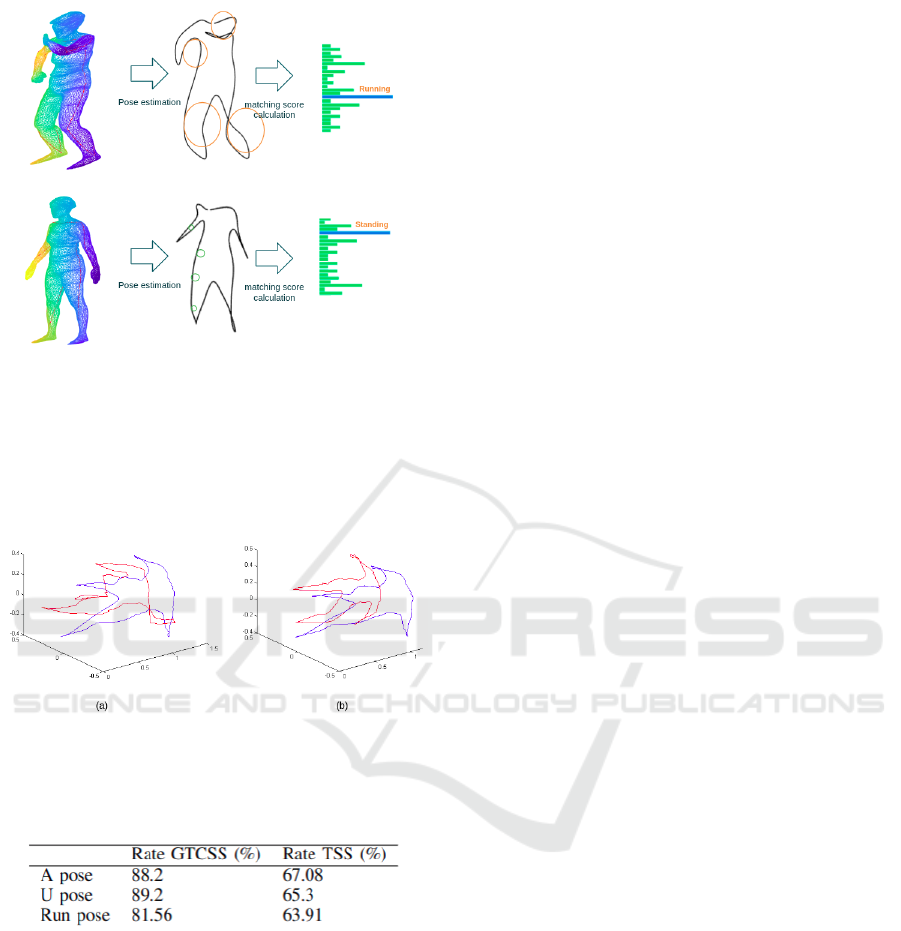
Figure 7: The decision process based on the descrimina-
tive measures of curvature and torsion in two space curves
representing two different poses. In red, zones with high
variations. In green, zones with low variations.
vised list of poses consisting of 36 descriptors: one
model descriptor for each pose. An example of a good
and bad matching is illustrated in Figure 8.
Figure 8: (a) An example of bad matching (b) An example
of a good matching.
Table 1: The obtained retrieval rate for different category of
poses.
Our proposed descriptor GTCSS is compared to
TSS (Yuen et al., 2000) with σ ranges from 0.5 to 12
with the step =0.2. Table.1 shows the retrieval results
of the GTCSS on 3DBodyTex dataset using KNN al-
gorithm, k=1 for some poses: A pose, U pose and Run
pose.
4 CONCLUSION
The problem of 3D curve description remains a sig-
nificant challenge in the field of computer vision, with
the need for robust and efficient methods that can ac-
curately represent the shape of 3D curves in a man-
ner that is invariant to various transformations. In this
paper, we introduce a new descriptor for 3D curves
called the Generalized Torsion Curvature Scale Space
(GTCSS) that is based on the calculation of curvature
and torsion measures at different scales. This descrip-
tor is invariant under rigid transformations, making it
well-suited for representing the shape of 3D curves.
To address the challenges associated with estimating
these measures, we employ a multi-scale technique
in our approach. By estimating torsion and curvature
at multiple scales, we are able to mitigate the cumula-
tive errors that can arise from the computation of mul-
tiple derivatives in the torsion equation. We demon-
strate the effectiveness of our approach through exper-
iments, where we extract space curves from 3D ob-
jects and apply our method to pose estimation tasks.
In future research, we plan to refine our method and
conduct further studies on the GTCSS parameters to
evaluate their effectiveness for 3D object recognition.
REFERENCES
Alajlan, N., El Rube, I., Kamel, M. S., and Freeman, G.
(2007). Shape retrieval using triangle-area representa-
tion and dynamic space warping. Pattern Recognition,
40(7):1911–1920.
Belongie, S., Malik, J., and Puzicha, J. (2002). Shape
matching and object recognition using shape contexts.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 24(4):509–522.
BenKhlifa, A. and Ghorbel, F. (2019). An almost complete
curvature scale space representation: Euclidean case.
Signal Processing: Image Communication, 75:32–43.
Burdin, V., Ghorbel, F., Tocnaye, J.-L., and Roux, C.
(1992). A three-dimensional primitive extraction of
long bones obtained from fourier descriptors. Pattern
Recognition Letters, 13:213–217.
Fotopoulou, F. and Economou, G. (2011). Multivariate an-
gle scale descriptor of shape retrieval. Proceedings of
SPAMEC, 2011.
Friedrich, T. (2002). Global Analysis: Differential Forms in
Analysis, Geometry, and Physics, volume 52. Ameri-
can Mathematical Soc.
Ghorbel, F. (1998). Towards a unitary formulation for
invariant image description: Application to image
coding. Annales des Telecommunications/Annals of
Telecommunications, 53:242–260.
Hoffman, D. and Richards, W. (1984). Parts of recognition.
Cognition, 18(1):65–96.
Jribi, M., Mathlouthi, S., and Ghorbel, F. (2021). A
geodesic multipolar parameterization-based represen-
tation for 3d face recognition. Signal Processing: Im-
age Communication, 99:116464.
Mokhtarian, F., Abbasi, S., and Kittler, J. (1997). Efficient
and robust retrieval by shape content through curva-
Generalized Torsion-Curvature Scale Space Descriptor for 3-Dimensional Curves
189

ture scale space. In Image Databases and Multi-Media
Search, pages 51–58.
Pedrosa, G. V., Batista, M. A., and Barcelos, C. A. (2013).
Image feature descriptor based on shape salience
points. Neurocomputing, 120:156–163. Image Fea-
ture Detection and Description.
Persoon, E. and Fu, K.-S. (1977). Shape discrimination us-
ing fourier descriptors. IEEE Transactions on Pattern
Analysis and Machine Intelligence, PAMI-8:388–397.
Ratanamahatana, C. A. and Keogh, E. (2004). Everything
you know about dynamic time warping is wrong. In
Third Workshop on Mining Temporal and Sequential
Data, pages 22–25.
Saint, A., Ahmed, E., Cherenkova, K., Gusev, G., Aouada,
D., and Ottersten, B. (2018). 3dbodytex: Textured 3d
body dataset. In 2018 International Conference on 3D
Vision (3DV), pages 495–504. IEEE.
Sankoff, D. and Kruskal, J. B. (1983). Time warps, string
edits, and macromolecules: The theory and practice
of sequence comparison. In Sankoff, D. and Kruskal,
J. B., editors, Time Warps, String Edits, and Macro-
molecules: The Theory and Practice of Sequence
Comparison. Addison-Wesley Publication.
Sebastian, T., Klein, P., and Kimia, B. (2003). On aligning
curves. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 25:116–125.
Yang, C. and Yu, Q. (2018). Multiscale fourier descriptor
based on triangular features for shape retrieval. Signal
Processing: Image Communication, 71.
Yuen, P., Mokhtarian, F., Khalili, N., and Illingworth,
J. (2000). Curvature and torsion feature extraction
from free-form 3-d meshes at multiple scales. IEE
Proceedings-Vision, Image and Signal Processing,
147(5):454–462.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
190
