
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and
Localization Based on HaloNet
Emilie Mathian
1,4 a
, Huidong Liu
2 b
, Lynnette Fernandez-Cuesta
1 c
, Dimitris Samaras
3 d
,
Matthieu Foll
1 e
and Liming Chen
4 f
1
International Agency for Research on Cancer (IARC-WHO), Lyon, France
2
Amazon, WA, U.S.A.
3
Stony Brook University, New York, U.S.A.
4
Ecole Centrale de Lyon, Ecully, France
Keywords:
Anomaly Detection, HaloNet, Transformer, Auto-Encoder.
Abstract:
Unsupervised anomaly detection and localization is a crucial task in many applications, e.g., defect detection
in industry, cancer localization in medicine, and requires both local and global information as enabled by the
self-attention in Transformer. However, brute force adaptation of Transformer, e.g., ViT, suffers from two
issues: 1) the high computation complexity, making it hard to deal with high-resolution images; and 2) patch-
based tokens, which are inappropriate for pixel-level dense prediction tasks, e.g., anomaly localization,and
ignores intra-patch interactions. We present HaloAE, the first auto-encoder based on a local 2D version of
Transformer with HaloNet allowing intra-patch correlation computation with a receptive field covering 25%
of the input image. HaloAE combines convolution and local 2D block-wise self-attention layers and performs
anomaly detection and segmentation through a single model. Moreover, because the loss function is generally
a weighted sum of several losses, we also introduce a novel dynamic weighting scheme to better optimize the
learning of the model. The competitive results on the MVTec dataset suggest that vision models incorporating
Transformer could benefit from a local computation of the self-attention operation, and its very low computa-
tional cost and pave the way for applications on very large images
a
a
The code is available at: https://github.com/IARCbioinfo/HaloAE.
1 INTRODUCTION
Anomaly detection (AD) aims to determine whether a
given image contains an abnormal pattern, given a set
of normal or abnormal images, while its localization
or segmentation need further to determine the subre-
gions containing the anomalies (see Figure 1). Listing
all anomalies is a difficult task because of their low
probability density. Therefore, the problem is usu-
ally addressed via unsupervised learning approaches.
The models use only the defect-free samples during
the learning phase and attempt to identify and local-
a
https://orcid.org/0000-0001-7175-4318
b
https://orcid.org/0000-0003-3833-9475
c
https://orcid.org/0000-0002-0724-6703
d
https://orcid.org/0000–0002-1373-0294
e
https://orcid.org/0000-0001-9006-8436
f
https://orcid.org/0000-0002-7782-9824
ize anomalies at the time of inference.
State of the art has featured two main ap-
proaches on AD: distribution or reconstruction-based.
Distribution-based approaches generally make use of
Deep Convolutional Neural Networks (Deep CNN)
to extract representations of normal images and learn
a parametric distribution of these features (Defard
et al., 2021), (Cohen and Hoshen, 2020a), (Gudovskiy
et al., 2022), (Rudolph et al., 2021), (Roth et al.,
2022). They typically require to learn two models,
one for anomaly detection and another for anomaly
segmentation. Reconstruction-based approaches in-
volve training a convolutional auto-encoder (CAE)
(Bergmann et al., 2019), (Bergmann et al., 2018), (Za-
vrtanik et al., 2021), to reconstruct the normal im-
ages and assume that the model should fail to recon-
struct abnormal images. The advantage of such ap-
proaches is that a single model can be used for both
anomaly detection and segmentation. However, most
Mathian, E., Liu, H., Fernandez-Cuesta, L., Samaras, D., Foll, M. and Chen, L.
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and Localization Based on HaloNet.
DOI: 10.5220/0011865900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
325-337
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
325
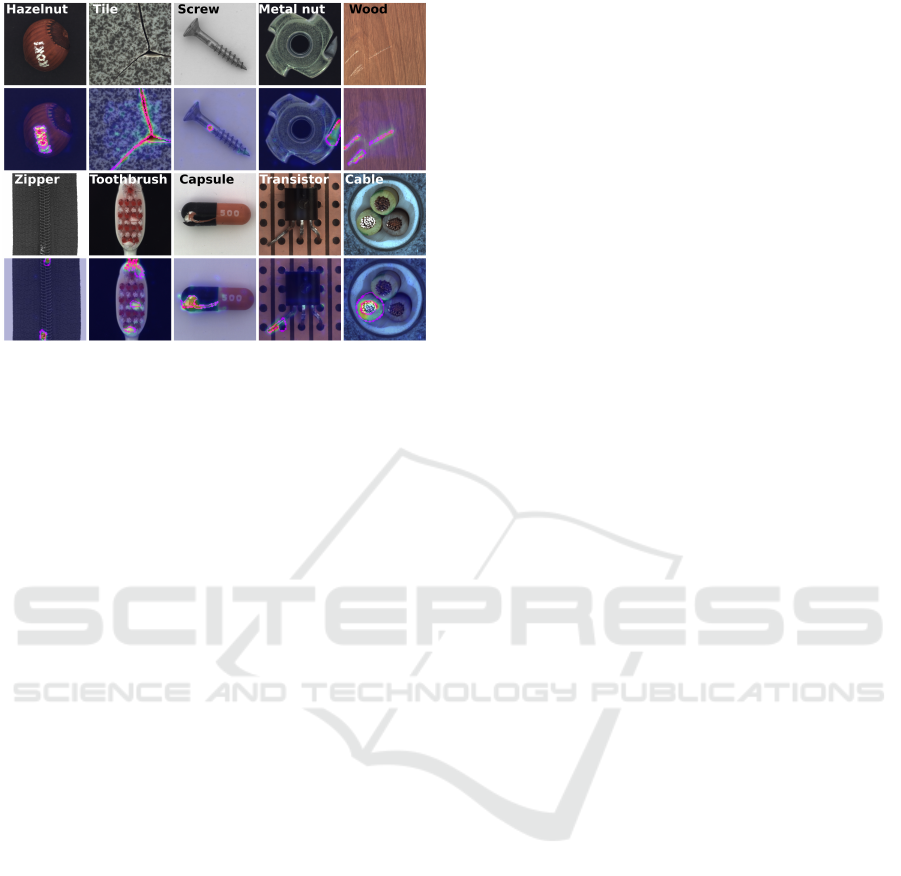
Figure 1: Anomaly localization results from the MVTec AD
dataset. The first and third rows show the input images, the
second and fourth rows show the anomaly maps generated
by HaloAE, the ground truth localization is circled with a
pink line.
of them (Bergmann et al., 2019), (Bergmann et al.,
2018), (Akcay et al., 2018) do not perform well as
they generalize strongly and can reconstruct anoma-
lies.
Because spotting anomalous patterns in images
usually requires the combination of local and global
information, promising models have been proposed
either using a full CNN (Zhang et al., 2020), or incor-
porating Transformer’s self-attention (Vaswani et al.,
2017). While CNNs easily capture local translation-
invariant patterns at multiple scales, they are not able
to model long-range content interactions as enabled
by the Transformer through its self-attention. How-
ever, straightforward adaptation of Transformer, e.g.
ViT (Dosovitskiy et al., 2020), for anomaly detec-
tion with an AE (Mishra et al., 2021), (Pirnay and
Chai, 2021), (Yang, 2021), suffers from three issues
of the original design: 1) computational complex-
ity which grows quadratically in image size, prevent-
ing its use for large scale images; 2) tokenization of
image patches which ignores intra-patch correlations
and makes it inappropriate for pixel-wise dense pre-
diction vision tasks as anormaly localization; and 3)
the ViT’s columnar architecture does not enable inter-
actions of multiple scale features.
To overcome the aforementioned deficiencies, we
propose in this paper a hybrid AE for anomaly
detection and localization, namely HaloAE, which
combines convolutional layers and a block-based
transformer with local self-attention (i.e., HaloNet
(Vaswani et al., 2021)) to achieve the best of both
worlds (Guo et al., 2022), (Pan et al., 2022). Specifi-
cally, our HaloAE starts by a CNN-based feature ex-
tractor, and integrates a HaloNet as encoder and a
specifically designed transposed version of HaloNet
as decoder. The CNN-based feature extractor gives
HaloAE access to multi-scale features of an input im-
age as in (Shi et al., 2021), (Yang, 2021), (Mishra
et al., 2021). Thanks to the integrated HaloNet
with its local block-based self attention, HaloAE fur-
ther enables intra-patch correlations and multi-scale
feature interactions. Moreover, the local nature of
the block-based self attention drastically decreases
both memory and computation complexity, making
it possible to achieve a large receptive field for self-
attention that covers 25% of the input images. How-
ever, while HaloAE is able to learn to reconstruct
multi-scale feature maps generated by a pre-trained
CNN, it also can strongly generalize and recover
anomaly regions (Mishra et al., 2021). To mitigate the
generalization problem of the proposed HaloAE, we
further incorporate a self-supervised learning (SSL),
and make use of the Cut&Paste framework (Li et al.,
2021), which defines a proxy classification task be-
tween normal and artificially damaged images. The
combination of classification and reconstruction tasks
derives a multi-objective problem (Groenendijk et al.,
2021). As a result, we further propose a novel evolv-
ing weighting scheme that optimizes the learning of
the model in mimicking the human learning strategy
while increasing the importance of complex tasks dur-
ing learning. Finally, unlike most existing methods,
our model does not use image patches for anomaly lo-
calization, which allows for high inference speed, and
thus its use on large histopathological images (70k x
70k pixels resolution) while maintaining pixel-level
localization. The performance of HaloAE was eval-
uated on the challenging MvTec dataset (Bergmann
et al., 2019), an industrial dataset with 15 objects (see
Figure 1).
Our contributions are as follows: we have devel-
oped a new hybrid AE model called HaloAE, which
combines a CNN-based multi-scale feature extractor
with local block-based self-attention to provide a sin-
gle model for both anomaly detection and localiza-
tion. We have introduced a new evolving weighting
scheme (EWS) to optimize the learning process for
dealing with our multi-task loss function. We have
shown that the proposed HaloAE achieves competi-
tive results on the MVTec benchmark, and that local
block-based self-attention outperforms a fully convo-
lutional model. Finally, we have demonstrated the
computational efficiency of HaloAE, and shown that
it can be applied to very large histological images.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
326

2 RELATED WORK
2.1 Anomaly Detection and
Localization Models
2.1.1 Reconstruction Based Methods
They are the most commonly used methods for AD
and localization (Bergmann et al., 2019), (Bergmann
et al., 2018), (Zavrtanik et al., 2021). They are usually
based on CAE, trained to reconstruct defect-free im-
ages. At the inference time, the trained models are ex-
pected to fail to reconstruct abnormal regions, as they
differ from the observed training data. Segmentation
maps of abnormal regions are obtained by per-pixel
comparison between input and output images based
on L
2
deviations (Bergmann et al., 2019), (Zavrtanik
et al., 2021), or SSIM values (Bergmann et al., 2019).
While simple and elegant in design, CAEs suffer from
memory and generalize abnormal regions quite well
(Zavrtanik et al., 2021), (Baur et al., 2018). In order
to regularize the generalization capacity of the AE,
DFR (Shi et al., 2021) shows that the integration of
local and global information is a key point to improve
existing AD methods. They train an AE to recon-
struct multi-scale feature maps, which are themselves
generated by concatenating different layers of a pre-
trained CNN. Our proposed method follows this line
of architecture design.
2.1.2 Distribution Based Methods
An important trend is to use large networks on exter-
nal training datasets such as ImageNet (Deng et al.,
2009) to model the distribution of normal features.
These methods assume that the normal data fits into a
predefined kernel space (Cohen and Hoshen, 2020a),
(Defard et al., 2021), (Cohen and Hoshen, 2020b),
(Roth et al., 2022), (Bergmann et al., 2020). They
then have to define the distances between the normal
data and the abnormal data, which are assumed to be
located outside this space. While some models use
clustering techniques (Cohen and Hoshen, 2020b),
(Roth et al., 2022), (Bergmann et al., 2019) to de-
tect samples outside the normal distribution of the
data, others model this distribution by Gaussian mod-
els (Defard et al., 2021), (Gudovskiy et al., 2022),
(Bergmann et al., 2020). These models working on
image patches are more powerful than the methods
based on reconstruction, (Defard et al., 2021), (Cohen
and Hoshen, 2020a), (Cohen and Hoshen, 2020b),
(Roth et al., 2022), (Bergmann et al., 2020), but this
leads to a great complexity at the time of the infer-
ence.
2.1.3 Self-Supervised Learning Based Methods
It is now widely accepted that data augmentation
strategies help to regularize CNN. To this end, various
inpainting reconstruction methods have been devel-
oped in the context of AD , (Pirnay and Chai, 2021),
(Zavrtanik et al., 2021). However at the inference
time these methods suffer from high complexity since
an anomaly map is generated via a set of in-painted
versions of an input image. Many SSL-based meth-
ods have shown that the data augmentation strategy
plays a critical role in defining an effective predic-
tive task. Based on this claim, Cut&Paste (Li et al.,
2021) created a data augmentation strategy in which
a patch in an image is copied to another location after
being randomly modified. This data-driven strategy
outperforms the state of the art in terms of image-level
classification. Nevertheless, this method must use im-
age patches to accurately locate anomalies, which re-
sults in high complexity at the time of inference. Our
HaloAE also leverages this data augmentation strat-
egy to regularize the proposed HaloNet-based AE.
2.2 Visual Transformer
Visual Transformer (ViT) is the first adaptation of
Transformer to images (Dosovitskiy et al., 2020).
This simple implementation requires a very large
dataset for training, and is very computationally ex-
pensive. In addition, ViT and its adaptations (Touvron
et al., 2021), (Chen et al., 2021) have two other major
limitations for their application to pixel-level tasks:
correlations within patches are not calculated, and the
output feature maps are single scale and low resolu-
tion, due to their columnar architecture (Liu et al.,
2021), (Wang et al., 2021).
To mitigate these drawbacks, two multi-scale ver-
sions of Transformer have recently been proposed.
Pyramidal Vision Transformer (PVT) implemented a
multi-scale transformer, using a strategy of progres-
sive shrinkage to compute attention over increasingly
larger windows, in a way similar to CNNs (Wang
et al., 2021). Swin Transformer (Liu et al., 2021) not
only offers multi-scale patches but also the calculation
of correlations between non-overlapping neighboring
windows, using a strategy of shifted windows.
Another possibility to adapt Transformer to local
tasks is to calculate the self-attention operation locally
within patches (Ramachandran et al., 2019), (Vaswani
et al., 2021). Exactly at the same time as PVT and
Swin, Vaswani et al. proposed HaloNet, where a
block-based local self-attention enable to achieve the
best speed/accuracy trade-off for image classification
tasks for both CNN and Transformer based architec-
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and Localization Based on HaloNet
327

tures (Vaswani et al., 2021). Assuming that neighbor-
ing pixels share most of their neighborhood, HaloNet
extracts a local neighborhood for a block of pixels in
a single run. This block-based strategy allows par-
allelizing the self-attention operation (Vaswani et al.,
2021). Halonet efficiency makes the model more
practical and hinting at its adaptation to larger widths,
e.g., very large scale medical images. Finally, un-
like Swin and PVT, Halonet computes self-attention
on 2D matrices, which facilitates its adaptation as a
hybrid model, in order to connect the boundaries of
self-attention blocks with convolutional operations.
The current methods that use the benefits of self-
attention for unsupervised AD have all incorporated
ViT into their models (Zhang et al., 2020), (Mishra
et al., 2021), (Yang, 2021), (Pirnay and Chai, 2021).
Thus, SAAE (Yang, 2021) and Intra (Pirnay and
Chai, 2021) proposed an AE based entirely on ViTs.
SAAE showed no significant improvement over an
all-convolutional layer-based architecture (Bergmann
et al., 2020). Intra added an inpainting scheme to the
SAAE architecture, which can be used to hide abnor-
mal regions to further restrict the model’s ability to
reconstruct them (Pirnay and Chai, 2021). However,
this technique is very complex at inference time, as a
set of painted versions of the input is required to lo-
cate the anomaly. In addition, all these models suffer
from inherent limitations in ViT: (1) For example, AD
resolution depends upon the patch size; 2) intra-patch
correlations are not considered, i.e., local informa-
tion; and 3) the feature map from ViT is single-scale,
which is not suitable for the localization task. In this
work, we propose to exploit a block-based local at-
tention, i.e., HaloNet, to define our AE and achieve a
single model for anomaly detection and segmentation
(Vaswani et al., 2021).
2.3 Multi-Task Learning
Multi-task learning is a paradigm in which different
tasks are learned jointly. This assumes that these tasks
are somehow related to each other and thus that the
parameters used to learn one task can help learn the
others. Usually, the final objective function is writ-
ten as a linear combination of the ones of different
tasks, and it is well-known that the weighting can
strongly affect the results (Groenendijk et al., 2021),
(Dosovitskiy and Djolonga, 2019). In general, the
weights are adjusted using an extensive grid search
and stay static during training (Groenendijk et al.,
2021). By mimicking the human learning process,
Li et al. proposed a mechanism to order the tasks
from the easiest one to the hardest one (Li et al.,
2017). They showed that their regularization on tasks
and instances reduces classification errors compared
to static weighting methods. Similarly, Galama et
al. showed that gradually increasing the complex-
ity of the input data during learning improves the re-
sults (Galama and Mensink, 2019). Inspired by these
works, we propose a new evolving weighting scheme
(EWS) that gradually increases the importance of the
most difficult tasks while equally weighting the in-
stances, which is an important consideration in unsu-
pervised AD.
3 METHOD
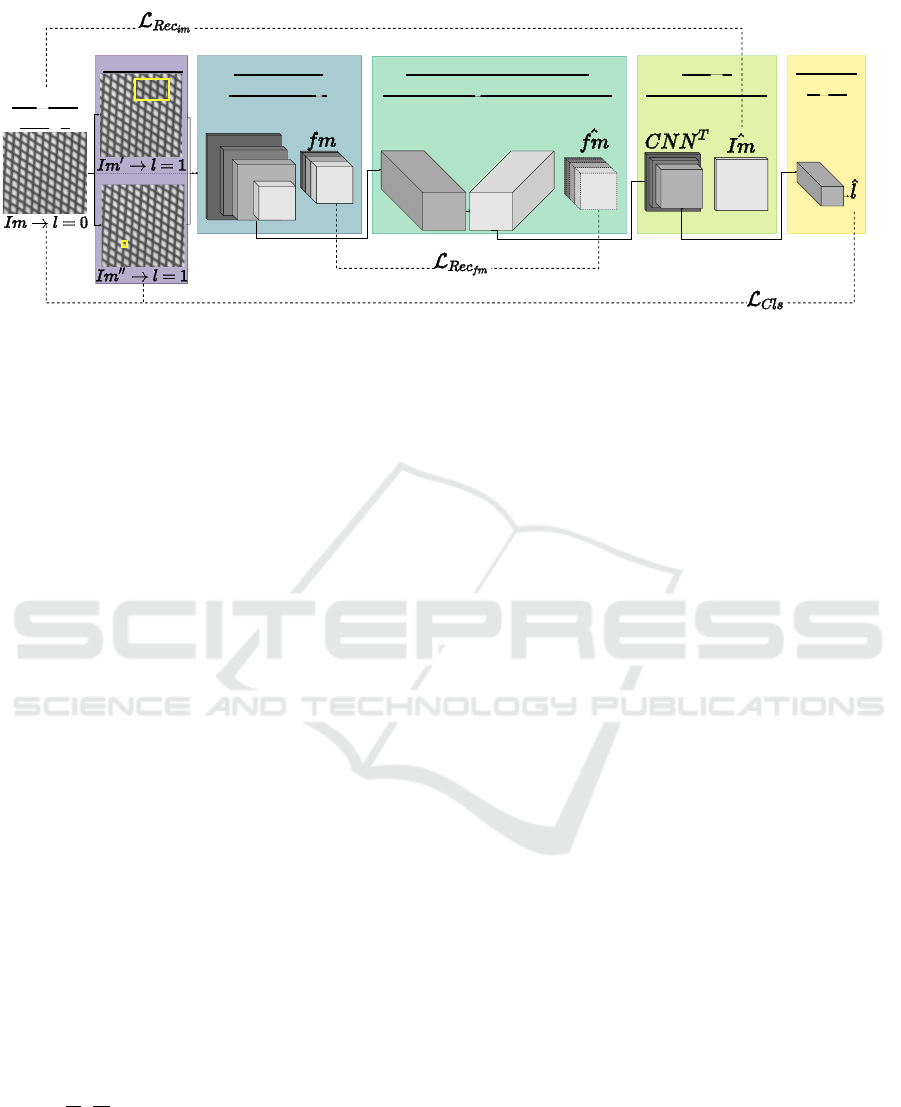
Figure 2 depicts the overall architecture of the pro-
posed HaloAE for AD. It includes 5 blocks: A) data
augmentation for self-supervised learning; B) VGG-
based multi-sacle feature extractor; C) HaloNet-based
autoencoder; D) CNN-based image reconstructor;
and E) the classifier layer. They are explained in the
subsequent subsections.
3.1 Self-Supervised Learning Block
To mimic industrial anomalies on the MVTec dataset
(Bergmann et al., 2019) we make use of the strategy
set up by Cut&Paste. This involves cutting out a piece
of varying shape, size and aspect ratio from an input
image and pasting it back in at a random location, af-
ter undergoing random transformations such as rota-
tions or color variations (Figure 2 - block A). This
framework allows to define a proxy classification task
between normal and artificially damaged images. Let
IM be the set of training images of size N such that
IM = {im
0
,...,im
N
}, where each im
i
is in R
w×h×c
,
with w, h and c the input width, height and number
of channels. We define a classification loss function
such as:
L
cls
=
1
N
N
∑
i=0
CE(g(
ˆ
im
i
),l = 0)
+ CE(g(CP(
ˆ
im
i
)),l = 1), (1)
where the function CE(.) refers to the binary cross
entropy function, CP(.) to the Cut&Paste data aug-
mentation strategy, and g(.) to the binary classifiers,
shown in Figure 2 - block E. This terminal linear layer
takes as input a reconstructed image
ˆ
im
i
associated
with its label l , which is equal to 1 if the image has
been augmented by CP(.) and 0 otherwise.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
328
Original
image
CutPaste
Fixed VGG
Halonet autoencoder:
Feature map reconstruction
Halonet
encoder
Image
reconstruction
Classif.
layer
Linear
layer
B C D E
Halonet
decoder
Multi-scale
feature map
A
Figure 2: Overview of HaloAE for AD. A) Cut&Paste data augmentation strategy for the SSL module (Li et al., 2021). B)
Multi-scaled feature map extraction via a pretrained VGG19 network (Simonyan and Zisserman, 2014) on ImageNet (Deng
et al., 2009). C) Halonet AE for feature map reconstruction. D) Reconstruction of images via transposed VGG blocks.
E) Linear layer to determine the classification loss. Im and
ˆ
Im, refer to the original image and the reconstructed image
respectively, similarly f m and
ˆ
f m refer to the feature map and its reconstruction. l and
ˆ
l refer to the label and its prediction,
0 is associated to the original picture, and 1 to its augmented versions. L
⌋↕∫
, L
Rec
f m
and L
Rec
im
refer to the classification loss
and reconstruction quality of feature maps and images respectively.
3.1.1 Multi-Scale Image Feature Extraction
Following the DFR (Shi et al., 2021) method, we use
a VGG19 (Simonyan and Zisserman, 2014) network
trained on ImageNet (Deng et al., 2009) to extract a
multi-scale feature map of an image. To this end, we
aggregate lower layer feature maps, coding for low-
level patterns, such as texture, and deep layer fea-
ture maps that code for higher-level information, such
as objectness. As reported by PathCore (Roth et al.,
2022), we exclude features from very deep layers to
avoid using overly generic features that are heavily
biased towards ImageNet classification. The resulting
multi-scale feature map is denoted f m ∈ R
w
1
×h
1
×c
1
,
here w
1
and h
1
equal to 64 and c
1
to 704, (see Figure
2 - block B).
3.2 Reconstruction Based on Halonet
The self-attention operation captures distant relation-
ships between pixels and generates spatially vary-
ing filters unlike convolutional layers (Ramachandran
et al., 2019), (Vaswani et al., 2021). We make use
of the block-based local self-attention introduced by
HaloNet to create a reconstruction of f m denoted
ˆ
f m.
f m is divided into a grid of non overlapping blocks
of size
h
1
b
,
w
1
b
. Every block behaves like a group of
query pixels. The haloing operation combines bands
of hl pixels around each block to obtain the shared
neighborhood from which the keys and values are cal-
culated. In this way, the local self-attention per block
multiplies each pixel in a shared neighborhood,after
they have been transformed by the same linear trans-
formation, by a probability considering both content-
content and content-geometry interactions, resulting
in spatially varying weights ((Vaswani et al., 2021)
eq. 2 and eq. 3). In this work, we set the block size
b to 12 and hl to 2, instead of using the original val-
ues which are 8 and 3 respectively, in order to capture
more contextual information by taking advantage of
the reduced size of the input since h
1
= h/4.
Halonet proposed architecture (Vaswani et al.,
2021) is modified while keeping its ResNets-like
structure (He et al., 2016). Specifically, we have mod-
ified: (a) the head layer, substituting the 7x7 convo-
lution with a stride of 2 by a 5x5 convolutional layer
with a stride of 1, so as not to reduce the spatial di-
mension of the input map again; (b) the number of
blocks per stage is set to 1 instead of 3 or 4 in the
original architecture, in order to create a lighter mem-
ory model with only 18 million of parameters; (c) in
each block the second 1 × 1 convolution is replaced
by a convolution layer with a filter of size 3 × 3 for
the first two stages and 5 × 5 for the last two. This
last modification allows both extracting local infor-
mation with the 2D convolution layer and connecting
the edges of the self-attention blocks. All these mod-
ifications are summarized in the supplementary Table
S1.
HaloNet encoder learns a compressed version of
the feature map f m by reducing its channels count.
From these encoded features f m
enc
in R
60×60×58
, f m
is reconstructed by decoder combining both convo-
lutional layers and local block self-attention layers.
The decoder follows a similar architecture as the en-
coder, but all convolutional layers have been replaced
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and Localization Based on HaloNet
329

by transposed convolutional layers, so as to obtain the
first transposed Halonet version (Figure 2 - block C
and supplementary Table S1).
The quality of the reconstructed feature maps is
evaluated by a per-pixel loss L
2
and by a percep-
tual loss called the structure similarity index SSIM
(Bergmann et al., 2018). Therefore, the loss associ-
ated with feature map reconstruction is given by:
L
Rec
f m
=
h
1
∑
i=1
w
1
∑
j=1
|| f m
i, j
−
ˆ
f m
i, j
||
2
+ (1 − SSIM( f m,
ˆ
f m))
(i, j)
, (2)
where the SSIM is calculted between patches centered
at (i, j).
To obtain a refined anomaly map at the image
scale, we also implement a small transposed convolu-
tional neural network, which is trained to reconstruct
the input image im from
ˆ
f m . It consists of five 2D
convolution layers with filters of size 3 × 3, followed
by a ReLU activation function (Figure 2 - block D and
supplementary Table S1).
3.3 Loss Function and Evolving
Weighting Scheme
By combining the losses described by eq. 1 and eq.
2 together with the loss associated with image recon-
struction, we define a multi-objective problem. In-
spired by the fact that humans often learn from an
easy concept to a more difficult one, as pointed out by
Li et al. (Li et al., 2017) and Galama et al. (Galama
and Mensink, 2019), we propose an evolving weight-
ing scheme (EWS) of the total loss function during
learning. This technique can take advantage of the
fact that some losses may conflict, such as in our case
the classification loss and the reconstruction losses,
while others may benefit from each other, such as
the L
2
term and the SSIM term in our reconstruction
equations eq. 2 and its adaptation for images. There-
fore, the weighting of different L
T
terms changes over
the number of epochs t such that:
L
T
(t) = α
1
(t)L
cls
+ α
2
(t)L
Rec
f m
+ α
3
(t)L
Rec
im
. (3)
We assume that the classification task is easier
compared to the two reconstruction tasks, since it is
a global decision at the image level while the quality
of the reconstructions is evaluated at the pixel level.
Moreover, since the quality
ˆ
im depends on the qual-
ity of
ˆ
f m, we assume that L
Rec
f m
must be optimized
before L
Rec
im
. To this end, as illustrated in Figure 3,
0.00
0.25
0.50
0.75
1.00
0 50 100 150 200 250
Epoch
α
α
1
: a = 1e+ 1, b = 0.4, c = 80
α
2
: a = 1e− 8, b = 1.2, c = 150
α
3
: a = 1e− 8, b = 2, c = 300
Figure 3: Evolution of α
α
α along with the number of
epochs. Each curve is modeled according to the follow-
ing equation, whose parameters are indicated in the legend:
(a−b)
1+exp(x−
c
2
)
0.05
+b. The α
α
α values are then normalized so that
they sum to 1.
we model the evolution of α
1
by a decreasing logis-
tic function, and α
2
and α
3
by two increasing logistic
functions lagged by the number of epochs.
4 EXPERIMENTS
4.1 Experimental Set-up
We evaluated our model on the recent challenging
MVTec AD dataset (Bergmann et al., 2019). The
MVTec images have been resized to 256 × 256 pix-
els. We applied data augmentation by randomly mod-
ulating the color. As explained above, each image is
associated with two artificially damaged images using
the Cut&Paste approach (Li et al., 2021).
All models have the same training hyperparame-
ters: 250 training epochs, an Adam type optimizer
with a learning rate of 1e
−4
and a weight decay of
1e
−5
, the batch size is 12.
To assess the performance of our method, we cal-
culated the anomaly maps by comparing f m and its
reconstruction
ˆ
f m via the L
2
distance such that:
A
f m
=
h
1
∑
i=1
w
1
∑
j=1
|| f m
i, j
−
ˆ
f m
i, j
||
2
. (4)
To obtain an anomaly map from f m at the scale of
im, we upsampled them by linear interpolation. Em-
pirically, we observed that A
f m
gives the best results
in terms of both classification and localization tasks.
The classification scores according to the values of
L
cls
and the segmentation scores obtained with A
im
,
(i.e. the anomaly maps resulting from the image re-
constructions), are given in supplementary Table S2.
The anomaly maps were post-processed to im-
prove results as explained in the supplementary Fig-
ure S1. They are first normalized by the average
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
330
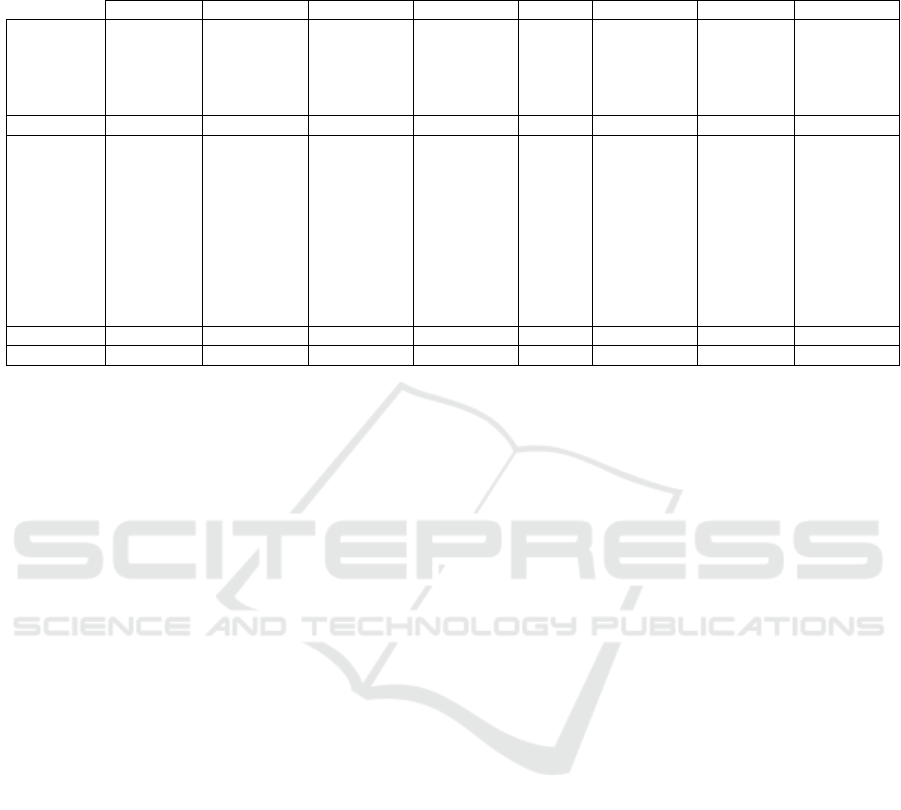
Table 1: Anomaly detection and localization performance on the MVTec dataset. The first score in the pair refers to the
image-level AD ROC-AUC score in percent, and the second to the pixel-wise ROC-AUC score in percent. The best score for
each object is highlighted in bold.
AE-l2 P-SVDD DFR Cut&Paste SAAE InTra PatchCore HaloAE
Carpet (-, 59.0) (92.9, 92.6) (95.6, 98.5) (100.0, 98.3) (-, 97.9) (98.8, 99.2) (98.7, 99.1) (69.7, 89.4)
Grid (-, 90.0) (94.4, 96.2) (95.0, 97.4) (96.2, 97.5) (-, 97.9) (100.0, 98.8) (97.9, 98.7) (95.1, 83.1)
Leather (-, 75.0) (90.9, 97.4) (99.4, 99.3) (95.4, 99.5) (-, 99.6) (100.0, 99.5) (100, 99.3) (97.8, 98.5)
Tile (-, 51.0) (97.8, 91.4) (93.1, 90.9) (100.0, 90.5) (-, 97.3) (98.2, 94.4) (98.9, 95.9) (95.7, 78.5 )
Wood (-, 73.0) (96.5, 90.8) (98.9, 95.4) (99.1, 95.5) (-, 97.6) (97.5, 88.7) (99.0, 95.1) (100.0, 91.1)
Mean Text. (-, 69.6) (94.5, 93.8) (96.4, 96.3) (98.1, 96.3) (-, 98.1) (98.9, 96.1) (98.9, 97.6) (91.7, 88.1)
Bottle (-, 86.0) (98.6, 98.1) (99.8, 95.8) (99.9, 97.6) (-, 97.9) (100.0, 97.1) (100, 98.6) (100.0, 91.9)
Cable (-, 86.0) (90.3, 96.8) (78.9, 91.4) (100.0, 90.0) (-, 96.8) (70.3, 91.0) (99.4, 98.5) (84.6, 87.6)
Capsule (-, 88.0) (76.7, 95.8) (96.2, 98.5) (98.6, 97.4) (-, 98.2) (86.5, 97.7) (97.8, 99.1) (88.4, 97.8)
HazelNut (-, 95.0) (92.0, 97.5) (97.0, 92.0) (93.3, 97.3) (-, 98.5) (95.7, 98.3) (100, 98.7) (99.8, 97.8)
MeatalNut (-, 86.0) (94.0, 98.0) (93.1, 93.3) (86.6, 93.1) (-, 97.6) (96.9, 93.3) (100, 98.4) (88.4, 85.2)
Pill (-, 85.0) (86.1, 95.1) (91.9, 96.8) (99.8, 95.7) (-, 98.1) (90.2, 98.3) (96.0, 97.6) (90.1, 91.5)
Screw (-, 96.0) (81.3, 95.7) (94.3,99.0) (90.7, 96.7) (-, 98.9) (95.7, 99.5) (97.0, 99.4) (89.6, 99.0)
Toothbrush (-, 93.0) (100.0, 98.1) (100.0, 98.5) (97.5, 98.1) (-, 98.1) (100.0, 98.9) (99.7, 98.7) (97.2, 92.9)
Transistor (-, 86.0) (91.5, 97.0) (80.6, 79.1) (99.8, 93.0) (-, 96.0) (95.8, 96.1) (100, 96.4) (84.4, 87.5)
Zipper (-, 77.0) (97.9, 95.1) (89.9, 96.9) (99.9, 99.3) (-, 96.9) (99.4, 99.2) (99.5, 98.9) (99.7, 96.0)
Mean Obj. (-, 87.8) (90.8, 96.7) (92.2, 94.1) (96.6, 95.8) (-, 97.7) (93.0, 96.9) (98.9, 98.4) (92.2, 92.7)
Mean (71.0, 81.7) (92.1, 95.7) (93.6, 94.9) (97.1, 96.0) (-, 97.8) (95.0, 96.7) (99.0, 98.1) (92.0, 91.2)
anomaly map of the training data, denoted A
f m
N
.
To do so, all the N anomaly maps from the train-
ing set are concatenated before being averaged along
the channel axis of dimension. This operation re-
duces potential noise (supplementary Figure S1). Fi-
nally, the anomaly maps are filtered using a Gaussian
kernel of size 3 × 3, which smoothes the boundaries
of the anomalous regions (supplementary Figure S1).
Image-level AD is reported by the threshold-agnostic
ROC-AUC metric. For the localization we reported
the pixel-wise ROC-AUC.
4.2 Quantitative Results
We compared our method with the methods discussed
in Section 2, ranging from AE L
2
(Bergmann et al.,
2019), which can be considered the simplest model,
to PatchCore (Roth et al., 2022), which is the best
model according to the state of the art. We have
also included Cut&Paste (Li et al., 2021) and DFR
(Shi et al., 2021) since we have reused parts of their
method. Note that we recomputed the DFR results to
have both the image-level AD ROC-AUC metric and
the per-pixel segmentation ROC-AUC scores that are
not available in the original paper. We also included
P-SVDD (Cohen and Hoshen, 2020a) to refer to an
embedding-similarity based method, as well as SAAE
(Yang, 2021) and InTra (Pirnay and Chai, 2021) to re-
fer to two other techniques using Transformer. The
results are summarized in Table 1.
We can observe that HaloAE obtains satisfactory
results for the detection of anomalies at the image
level with an average ROC-AUC score of 92.0%.
This result is strongly influenced by the poor perfor-
mance obtained specifically on the carpet object. As
illustrated in Figure S2, the network seems to be able
to reconstruct the anomalies for this object, so the dis-
tribution of A
f m
means is similar between normal and
abnormal objects. For the pixel-wise segmentation re-
sults, HaloAE obtains an average ROC-AUC score of
91.2%. It is important to note that our model is an all-
in-one model that does not require image patches for
the localization task, unlike P-SVDD, Cut&Paste, In-
Tra or PatchCore, which implies a trade-off between
excellent accuracy and speed, as described in the next
section.
4.3 Inference Time
The inference time is a key criterion to use our
anomaly detection model on very large scale im-
ages. The results in Table 2 have been ob-
tained with the following hardware configuration fol-
lowing hardware configuration: Intel(R) Xeon(R)
Silver 4216 CPU @ 2.10GHz and an NVIDIA
Quadro RTX 5000. We used the official ones
of the models when available, while the code
posted on https://github.com/LilitYolyan/CutPaste,
and https://github.com/jhy12/inpainting-transformer
have been used respectively for Cut&Paste (Li et al.,
2021) and InTra (Pirnay and Chai, 2021). For Patch-
Core, we used a WideResNet50 (Zagoruyko and Ko-
modakis, 2016) with a subsampling of the memory
bank at 10%. For the other models we used the
parameters described in the papers. The speed of
HaloAE can be explained by the fact that our model
does not use patches for the localization task, which
is directly computed on the reconstructed
ˆ
f m. The
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and Localization Based on HaloNet
331
efficiency of HaloAE compared to DFR, which take
as input images of the same size and have a similar
number of parameters, i.e. ∼ 18M, can be explained
by the depth of the multi-scale feature maps to be re-
constructed of 704 versus 3456 for DFR, and the use
of a Halonet-based architecture.
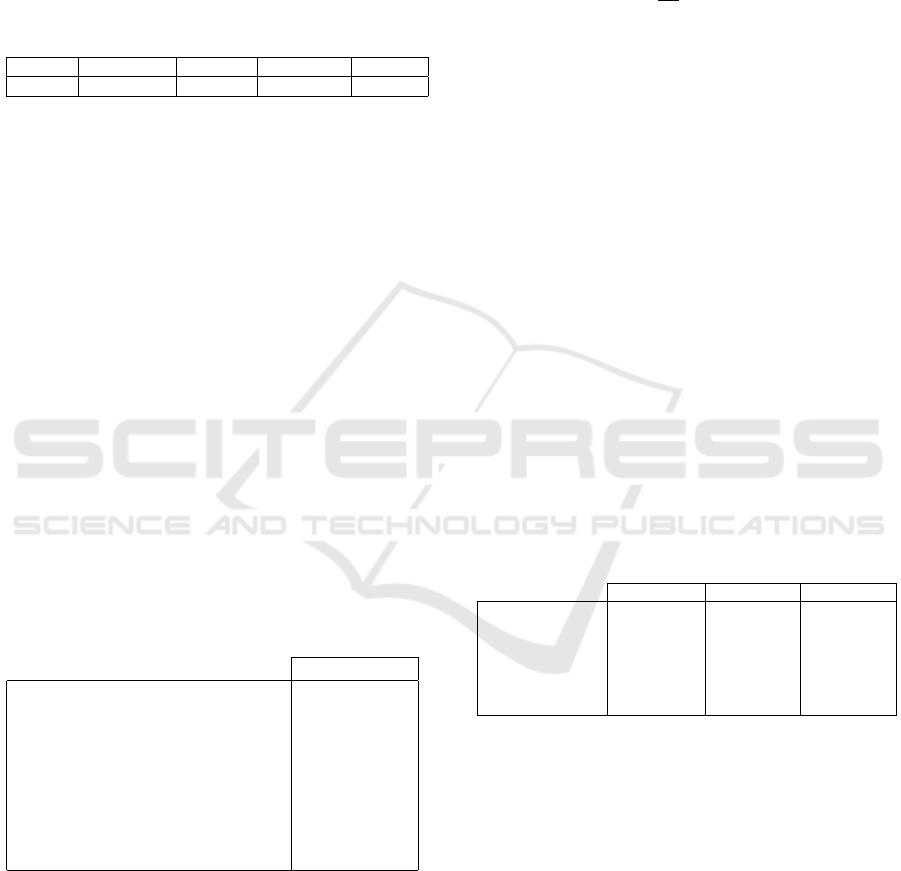
Table 2: Number of frames per second (FPS) inferred by
the different models and, in parentheses, the speedup ratio
compared to our model.
DFR Cut&Paste InTra PatchCore HaloAE
5.4 (x4) 2.2 (x10) 0.3 (x73) 2.7 (x8) 22.0
4.4 Qualitative Results
We visualize some results of the anomaly localization
in Figure 1. The first and third rows show the in-
put images while the second and last rows show the
post-processed anomaly maps. These representations
highlight that HaloAE is capable of locating tiny de-
fects, as illustrated by the screw, capsule or zipper,
and large defects, as illustrated by the hazelnut or the
tile. In addition, HaloAE detects both structural de-
fects, as shown by the wood and the tile, and color
defects, as in the cable example, where the cable in
the lower left corner is supposed to be red.
4.5 Ablation Study
Table 3: Ablation study on loss function. The first row
shows the final scores of our model, while the other rows
highlight the effects of different L
T
modifications. In each
pair, the first element refers to the image-level AD ROC-
AUC score in percent and the second to the pixel-wise
ROC-AUC score in percent. The best score is highlighted
in bold.
Mean
L
T
(t) equal to eq. 3 (92.0, 91.2)
L
T
= L
cls
+ L
Rec
f m
+ L
Rec
im
(79.0, 86.3)
L
T
(t) equal to eq. 5 (88.2, 85.9)
L
T
(t) = α
1
(t)L
cls
+ α
2
(t)L
Rec
f m
(71.43, 79.1)
L
T
(t) = α
1
(t)L
cls
+ α
2
(t)L
Rec
im
(72.5, 82.2)
L
T
(t) = L
Rec
f m
+ L
Rec
im
(76.8, 87.8)
L
T
(t) = L
cls
(82.9, 70.6)
L
T
(t) = L
Rec
f m
(79.6, 90.3)
To study the efficiency of our workflow, we per-
formed different ablation experiments exploring our
loss function (eq.3) and the different blocks of the
network (Figure 2). To study the loss function, we
first explored the effect of the EWS. We found that
equal weighting of L
T
terms has a negative impact on
the performance of the classification and segmenta-
tion tasks, with an average loss of 12.0 and 4.9 points
respectively (2
nd
row of table 3). To compare our
EWS with other evolving weighting strategies, we im-
plemented the method of Kendall et al. (Kendall et al.,
2018) which takes into account the homoscedastic un-
certainty of each task, with the loss function rewritten
as:
L
T
=
3
∑
i=1
L
i
σ
2
i
+
3
∑
i=1
log(σ
2
i
) (5)
where each loss term is denoted by L
i
and σ
i
being the
uncertainty parameter of each task. The results show
that our weighting scheme is better for each of the
two scores, emphasizing the importance of learning
difficult tasks after easy ones (3
rd
row of Table 3).
Then we studied, the importance of image recon-
struction loss (Figure 2 - block D). Removing either
the transposed CNN associated with image recon-
struction (4
th
row of Table 3, or the loss term asso-
ciated with feature map (5
th
row of Table 3) had a
significant impact on both the classification and seg-
mentation scores. Removing the classification loss
term to evaluate the effect of the SSL module (Fig-
ure 2 - block A) resulted in a decrease of 14.6 points
in classification score and 3.4 points in segmentation
score. However, training the model only on classifi-
cation loss did not yield any improvement in classifi-
cation scores (7
th
row of Table 3).
Table 4: Ablation study on the architecture. The first row
shows the final scores of our model. In each pair, the first
element refers to the image-level AD ROC-AUC score in
percent and the second to the pixel-wise ROC-AUC score in
percent. The best score per column is highlighted in bold.
Mean Text. Mean Obj. Mean
HaloAE (final) (91.7, 88.1) (92.2, 92.7) (91.4, 91.2)
AE-l2 (70.0, 69.2) (88.0, 88.9) (82.0, 82.5)
AE-SSIM (78.0, 78.2) (91.0, 91.2) (87, 86.9)
Block C only (75.6, 67.4) (78.2, 78.8) (77.3, 75.0)
Block C as CNN (89.5, 94.1) (82.7, 90.4) (85.0, 90.4)
Block C as Swin (90.3, 85.8) (82.2, 88.0) (84.9, 86.5)
To evaluate our network architecture, we first
compared the performance of HaloNet as a simple AE
dedicated to image reconstruction, retaining only the
C block in Figure 2. HaloNet as an AE does not per-
form as well as CAEs, suggesting that our model is
able to reconstruct abnormal regions through greater
generalization (4
th
row of Table 4). This justifies
the need for the feature extractor module (Figure 2
- block B). Next, we replaced the HaloNet AE mod-
ule with the CAE from DFR (Shi et al., 2021). In
our architecture, the use of local block self-attention
improves the results with an increase of 6.4 and 0.8
points for classification and segmentation respectively
(5
th
row of Table 4). This important experiment high-
lights that our hybrid model captures more informa-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
332
tion than a fully convolutional model, emphasizing
that the long-range information extracted by the self-
attentive blocks, covering up to 25% of the feature
map, improves the detection of abnormal regions. Fi-
nally, to compare the attention operations proposed
by Swin Transformer (Liu et al., 2021) and HaloNet,
we designed a Swin AE according to the architecture
proposed by (Lin et al., 2022) and we included it in
block C - Figure 2. Swin AE has a similar number of
parameters to HaloAE, namely 18 million. Our hy-
brid module compared to the model including Swin
Transformer improves the results with an increase of
6.5 and 4.7 points (6
th
row of Table 4). This sug-
gests that the convolutional operation captures addi-
tional information in comparison to a model including
self-attention only.
4.6 Complementary Experiment
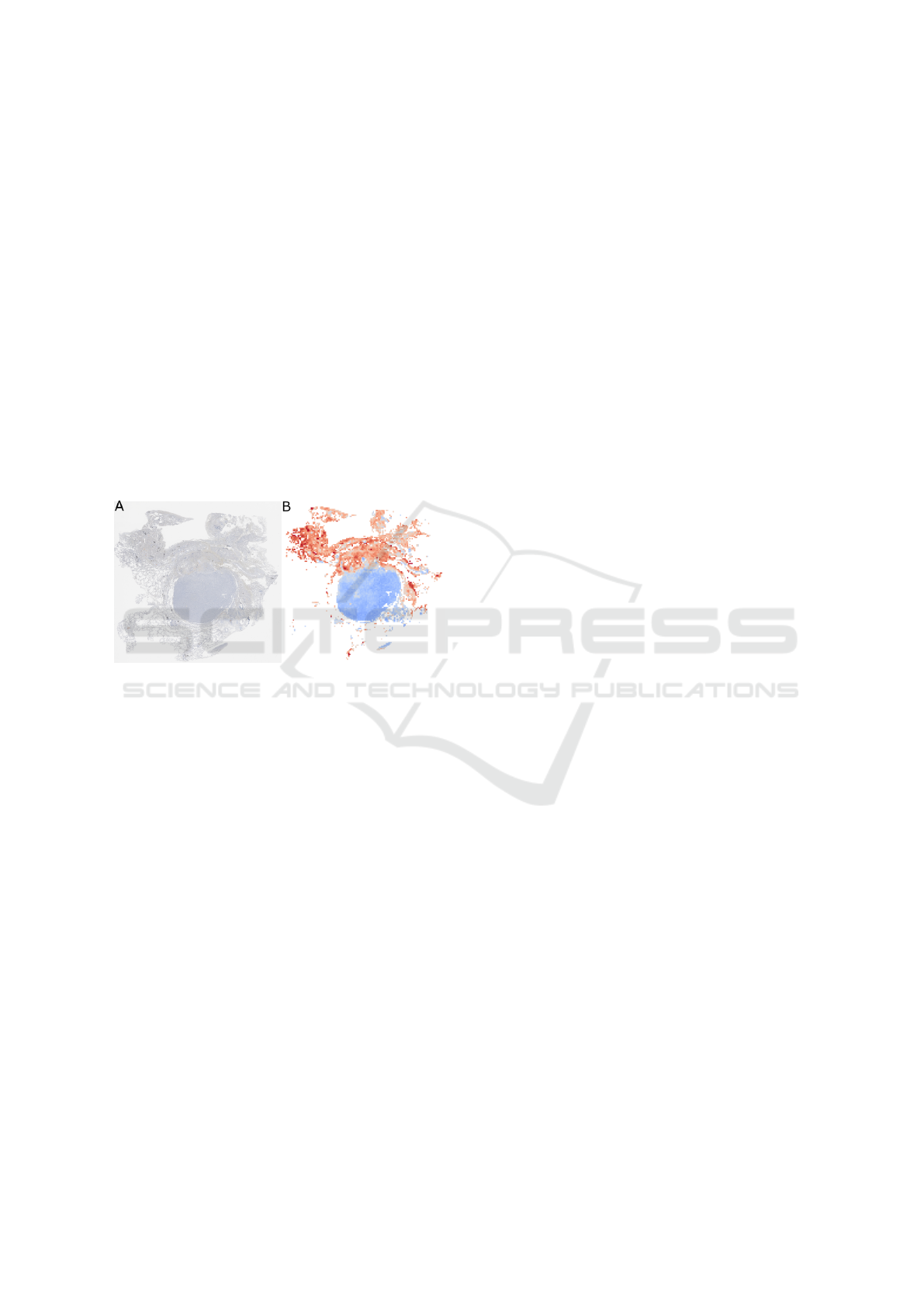
Figure 4: Tumor segmentation experiment. A) Histopatho-
logical image of a lung tumor with KI67 immunostaining.
B) Heatmap of the averages of anomaly scores per tile, the
bluer the tile the more tumorous it is and vice versa for red-
dish tiles.
The use of unsupervised learning techniques is still
little explored in histology (Quiros et al., 2022),
(Cheerla and Gevaert, 2019), even though, contrary
to supervised techniques, they could reveal unknown
morphological characteristics. The efficiency and
performance of HaloAE make it a relevant candidate
for very large scale image analysis. Thus, HaloAE
was applied to segment lung tumors from histopatho-
logical images of 70k × 70k pixels. The model was
trained on a set of 7000 tumor patches of 256 × 256
pixels, extracted from 50 patients treated in 11 hospi-
tals. The very promising results presented in Figure
4, highlight the ability of the model to learn what is
supposed to be non-discriminative based on a highly
variable training set, compared to MVTec (see supple-
mentary Figure S3). Indeed, the training set includes
many biases such as hospital of origin, or slide prepa-
ration. This unsupervised approach is innovative for
histopathological image analysis. It can be extended
to many medical problems, such as comparison be-
tween two diseases, since it provides pixel-level inter-
pretation without assumptions or the need to annotate
subregions.
5 DISCUSSION AND
CONCLUSION
To the best of our knowledge, HaloAE is the first
model to incorporate a local version of Transformer,
along with HaloNet (Vaswani et al., 2021), to han-
dle an AD problem. Computing intra-patch correla-
tions via the local block self-attention operation im-
proves both detection and localization. The module
optimizing the oversampling of reconstructed feature
maps allows us to obtain an all-in-one model, which
does not require an expansive patch-based process for
anomaly segmentation. We also show that the inte-
gration of an SSL approach leads to a better regu-
larization of the AE, ultimately improving the detec-
tion score at the image level. Finally, the score im-
provement provided by our new evolving loss func-
tion weighting scheme suggests that learning multiple
tasks simultaneously would be facilitated by giving
increasing importance to the most difficult tasks.
Overall, HaloAE performs competitively on the
MVTec dataset (Bergmann et al., 2019). Our hy-
brid AE between CNN and local Transformer outper-
forms both a fully convolutional model and a fully
attentional model implemented according to the Swin
Transformer (Liu et al., 2021) architecture, highlight-
ing the importance of integrating global and local
information at each step of the process, while sug-
gesting the existence of a synergy of both operations
(Zhao et al., 2021), (Fang et al., 2022).
The low memory and computational complexity
of the 2D block-wise self-attention, as proposed by
HaloNet, allows the model to be applied to very large
images, while enabling the calculation of very dis-
tant correlations. This is particularly interesting for
medical applications, where unsupervised models of
anomaly detection are still little explored, although
very promising because they do not require any prior
knowledge of the biological elements that discrimi-
nate different diseases or states. In addition, this ap-
proach offers a pixel-level interpretation, and thus al-
lows the identification of the most discriminating bi-
ological elements with respect to the training set.
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and Localization Based on HaloNet
333

ACKNOWLEDGMENTS
This work for Liming Chen was in part supported
by the 4D Vision project funded by the Partner Uni-
versity Fund (PUF), a FACE program, as well as
the French Research Agency, l’Agence Nationale
de Recherche (ANR), through the projects Learn
Real (ANR-18-CHR3-0002-01), Chiron (ANR-20-
IADJ-0001- 01), Aristotle (ANR-21-FAI1-0009-01),
and the joint support of the French national pro-
gram of investment of the futur and the the regions
through the PSPC FAIR Waste project. This work
has been funded by the Neuroendocrine Tumor Re-
search Foundation (NETRF 2022 investigator award
to Matthieu Foll). This work was granted access to the
HPC resources of IDRIS under the allocation 2022-
[AD011012172R1] made by GENCI.
DISCLAIMER
Where authors are identified as personnel of the In-
ternational Agency for Research on Cancer/World
Health Organization, the authors alone are responsi-
ble for the views expressed in this article and they
do not necessarily represent the decisions, policy or
views of the International Agency for Research on
Cancer /World Health Organization.
REFERENCES
Akcay, S., Atapour-Abarghouei, A., and Breckon, T. P.
(2018). Ganomaly: Semi-supervised anomaly detec-
tion via adversarial training. In Asian conference on
computer vision, pages 622–637. Springer.
Baur, C., Wiestler, B., Albarqouni, S., and Navab, N.
(2018). Deep autoencoding models for unsupervised
anomaly segmentation in brain mr images. In Inter-
national MICCAI Brainlesion Workshop, pages 161–
169. Springer.
Bergmann, P., Fauser, M., Sattlegger, D., and Steger, C.
(2019). Mvtec ad–a comprehensive real-world dataset
for unsupervised anomaly detection. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 9592–9600.
Bergmann, P., Fauser, M., Sattlegger, D., and Steger,
C. (2020). Uninformed students: Student-teacher
anomaly detection with discriminative latent embed-
dings. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
4183–4192.
Bergmann, P., L
¨
owe, S., Fauser, M., Sattlegger, D., and Ste-
ger, C. (2018). Improving unsupervised defect seg-
mentation by applying structural similarity to autoen-
coders. arXiv preprint arXiv:1807.02011.
Cheerla, A. and Gevaert, O. (2019). Deep learning with
multimodal representation for pancancer prognosis
prediction. Bioinformatics, 35(14):i446–i454.
Chen, C.-F., Fan, Q., and Panda, R. (2021). Crossvit:
Cross-attention multi-scale vision transformer for im-
age classification. arXiv preprint arXiv:2103.14899.
Cohen, N. and Hoshen, Y. (2020a). Sub-image anomaly
detection with deep pyramid correspondences. arXiv
preprint arXiv:2005.02357.
Cohen, N. and Hoshen, Y. (2020b). Sub-image anomaly
detection with deep pyramid correspondences. arXiv
preprint arXiv:2005.02357.
Defard, T., Setkov, A., Loesch, A., and Audigier, R. (2021).
Padim: a patch distribution modeling framework for
anomaly detection and localization. In International
Conference on Pattern Recognition, pages 475–489.
Springer.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Dosovitskiy, A. and Djolonga, J. (2019). You only train
once: Loss-conditional training of deep networks. In
International conference on learning representations.
Fang, J., Lin, H., Chen, X., and Zeng, K. (2022). A hybrid
network of cnn and transformer for lightweight im-
age super-resolution. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 1103–1112.
Galama, Y. and Mensink, T. (2019). Itergans: Iterative gans
to learn and control 3d object transformation. Com-
puter Vision and Image Understanding, 189:102803.
Groenendijk, R., Karaoglu, S., Gevers, T., and Mensink, T.
(2021). Multi-loss weighting with coefficient of vari-
ations. In Proceedings of the IEEE/CVF Winter Con-
ference on Applications of Computer Vision, pages
1469–1478.
Gudovskiy, D., Ishizaka, S., and Kozuka, K. (2022). Cflow-
ad: Real-time unsupervised anomaly detection with
localization via conditional normalizing flows. In Pro-
ceedings of the IEEE/CVF Winter Conference on Ap-
plications of Computer Vision, pages 98–107.
Guo, J., Han, K., Wu, H., Tang, Y., Chen, X., Wang, Y.,
and Xu, C. (2022). Cmt: Convolutional neural net-
works meet vision transformers. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 12175–12185.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Kendall, A., Gal, Y., and Cipolla, R. (2018). Multi-task
learning using uncertainty to weigh losses for scene
geometry and semantics. In Proceedings of the IEEE
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
334

conference on computer vision and pattern recogni-
tion, pages 7482–7491.
Li, C., Yan, J., Wei, F., Dong, W., Liu, Q., and Zha, H.
(2017). Self-paced multi-task learning. In Thirty-First
AAAI Conference on Artificial Intelligence.
Li, C.-L., Sohn, K., Yoon, J., and Pfister, T. (2021). Cut-
paste: Self-supervised learning for anomaly detection
and localization. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition, pages 9664–9674.
Lin, A., Chen, B., Xu, J., Zhang, Z., Lu, G., and Zhang,
D. (2022). Ds-transunet: Dual swin transformer u-net
for medical image segmentation. IEEE Transactions
on Instrumentation and Measurement.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. arXiv
preprint arXiv:2103.14030.
Mishra, P., Verk, R., Fornasier, D., Piciarelli, C., and
Foresti, G. L. (2021). Vt-adl: A vision transformer
network for image anomaly detection and localization.
arXiv preprint arXiv:2104.10036.
Pan, X., Ge, C., Lu, R., Song, S., Chen, G., Huang, Z., and
Huang, G. (2022). On the integration of self-attention
and convolution. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition, pages 815–825.
Pirnay, J. and Chai, K. (2021). Inpainting transformer for
anomaly detection. arXiv preprint arXiv:2104.13897.
Quiros, A. C., Coudray, N., Yeaton, A., Yang, X., Chiri-
boga, L., Karimkhan, A., Narula, N., Pass, H., Mor-
eira, A. L., Quesne, J. L., Tsirigos, A., and Yuan,
K. (2022). Self-supervised learning in non-small cell
lung cancer discovers novel morphological clusters
linked to patient outcome and molecular phenotypes.
Ramachandran, P., Parmar, N., Vaswani, A., Bello, I.,
Levskaya, A., and Shlens, J. (2019). Stand-alone
self-attention in vision models. arXiv preprint
arXiv:1906.05909.
Roth, K., Pemula, L., Zepeda, J., Sch
¨
olkopf, B., Brox,
T., and Gehler, P. (2022). Towards total recall in
industrial anomaly detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 14318–14328.
Rudolph, M., Wandt, B., and Rosenhahn, B. (2021). Same
same but differnet: Semi-supervised defect detec-
tion with normalizing flows. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision, pages 1907–1916.
Shi, Y., Yang, J., and Qi, Z. (2021). Unsupervised anomaly
segmentation via deep feature reconstruction. Neuro-
computing, 424:9–22.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and J
´
egou, H. (2021). Training data-efficient
image transformers & distillation through attention.
In International Conference on Machine Learning,
pages 10347–10357. PMLR.
Vaswani, A., Ramachandran, P., Srinivas, A., Parmar, N.,
Hechtman, B., and Shlens, J. (2021). Scaling lo-
cal self-attention for parameter efficient visual back-
bones. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
12894–12904.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
neural information processing systems, pages 5998–
6008.
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang, D.,
Lu, T., Luo, P., and Shao, L. (2021). Pyramid vi-
sion transformer: A versatile backbone for dense pre-
diction without convolutions. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 568–578.
Yang, Y. (2021). Self-attention autoencoder for anomaly
segmentation.
Zagoruyko, S. and Komodakis, N. (2016). Wide residual
networks. arXiv preprint arXiv:1605.07146.
Zavrtanik, V., Kristan, M., and Sko caj, D. (2021). Recon-
struction by inpainting for visual anomaly detection.
Pattern Recognition, 112:107706.
Zhang, Y., Gong, Y., Zhu, H., Bai, X., and Tang, W. (2020).
Multi-head enhanced self-attention network for nov-
elty detection. Pattern Recognition, 107:107486.
Zhao, Y., Wang, G., Tang, C., Luo, C., Zeng, W., and Zha,
Z.-J. (2021). A battle of network structures: An empir-
ical study of cnn, transformer, and mlp. arXiv preprint
arXiv:2108.13002.
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and Localization Based on HaloNet
335

APPENDIX
Figure S1: Post processing workflow. A) Input image.
B) Anomaly map (see eq.4 in main text). C) Normalized
anomaly map. D) Normalized anomaly map smoothed with
a Gaussian filter.
Figure S2: Results of the carpet classification. A) Distribu-
tion of the means of the post-processed anomaly maps com-
puted on the feature maps, for defect-free and anomalous
objects. B) Distribution of anomaly scores by defect cate-
gory. Defect-free objects and anomalous objects have simi-
lar distributions. C) Carpet images and their corresponding
anomaly map, 1
st
and 2
nd
columns defect-free objects, 3
rd
and 4
th
anomalous objects.
Figure S3: Example of the dataset used for lung tumor seg-
mentation: each 256 × 256 tile is extracted from a KI67-
stained histopathology image of approximately 70k × 70k
pixels. The first row shows non-tumor images and the sec-
ond row tumor tiles respectively.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
336
Table S1: Summary of the HaloNet AE architecture: Each brace encloses a block, the number of blocks per stage is indicated
in front of it. The batch normalization operation is denoted by BN, the convolution layers and the transposed convolution
layers are denoted by conv and conv
T
respectively. Finally, the number of channels at the end of each stage is indicated in the
right-hand column for the encoder and decoder.
Halonet encoder Halonet decoder
5 × 5 conv, BN, relu d
f m
= 704 3 ×
1 × 1 conv
T
, BN
Attention(b,h),relu
3 × 3 conv
T
, BN
d
dec
s1
= 29
d
dec
s2
= 55
d
dec
s3
= 118
2 ×
1 × 1 conv, BN
Attention(b,h),relu
3 × 3 conv, BN
d
enc
s1
= 234
d
enc
s2
= 117
1 ×
1 × 1 conv
T
, BN
Attention(b,h),relu
5 × 5 conv
T
, BN
d
dec
s4
= 237
2 ×
1 × 1 conv, BN
Attention(b,h),relu
5 × 5 conv, BN
d
enc
s3
= 58
d
enc
s4
= 29
1 ×
1 × 1 conv
T
, BN
Attention(b,h),relu
1 × 1 conv
T
, BN
d
dec
s5
= 704
Table S2: Exploring the outputs of HaloAE and the post-processing procedure. The first pair score corresponds to the image-
level AD ROC-AUC score in percent, and the second to the pixel-level ROC-AUC score in percent. The best score for each
object is highlighted in bold. A represents the anomaly maps, denoted A
im
or A
f m
if they are computed on the images or from
the feature maps. A
{im, f m}
N
represents the normalized anomaly maps. Finnaly, N
f ilter
refers to the Gaussian filter applied to
the normalized anomaly map.
L
cls
A
im
N
+ N
f ilter
A
f m
A
f m
N
A
f m
N
+ N
f ilter
Carpet (56.9, -) (74.4, 60.7) (54.3, 88.1) (60.7, 88.5) (69.7, 89.4)
Grid (100.0, -) (82.1, 53.4) (94.5, 82.7) (95.2, 83.0) (95.1, 83.1)
Leather (71.0, -) (60.2, 78.3) (97.2, 98.0) (97.8, 98.1) (97.8, 98.5)
Tile (51.5, -) (92.6, 66.1) (93.3, 75.9) (95.2, 76.1) (95.7, 78.5 )
Wood (93.2, -) (99.0, 77.4) (99.7, 90.7) (99.9, 90.3) (100.0, 91.1)
Mean Text. (74.5, -) (81.66, 67.2) (87.8, 87.1) (89.8, 87.2) (89.7, 88.1)
Bottle (98.4, -) (99.9, 86.7) (99.9, 90.0) (100.0, 91.7) (100.0, 91.9)
Cable (100.0, -) (62.8, 76.3) (79.2, 77/9) (84.6, 86.1) (84.6, 87.6)
Capsule (96.8, -) (54.5, 63.6) (83.2, 97.3) (88.4, 97.4) (88.4, 97.8)
HazelNut (99.4, -) (86.3, 76.0) (98.9, 97.9) (99.6, 97.7) (99.8, 97.8)
MeatalNut (98.0, -) (65.2, 69.2) (85.6, 86.3) (88.4, 84.5) (88.4, 85.2)
Pill (100.0, -) (50.8, 77.2) (86.4, 92.8) (90.6, 89.9) (90.1, 91.5)
Screw (100.0, -) (54.6, 78.5) (88.6, 98.8) (89.6, 98.6) (89.6, 99.0)
Toothbrush (58.1. -) (89.7, 81.0) (94.7, 93.0) (97.2, 92.6) (97.2, 92.9)
Transistor (92.3, -) (81.5, 79.9) (80.0, 84.8) (84.4, 85.6) (84.4, 87.5)
Zipper (51.4, -) (99.7, 86.8) (99.7, 95.4) (99.7, 95.3) (99.7, 96.0)
Mean Obj. (89.4, -) (74.5, 77.5) (89.6, 91.6) (92.3, 91.9) (92.2, 92.7)
Mean (84.4, -) (76.9, 74.1) (89.0, 90.0) (91.4, 90.4) (91.4, 91.2)
HaloAE: A Local Transformer Auto-Encoder for Anomaly Detection and Localization Based on HaloNet
337
