
Latent Code Disentanglement Using Orthogonal Latent Codes and
Inter-Domain Signal Transformation
Babak Solhjoo
a
and Emanuele Rodol
`
a
b
Department of Computer Science, Sapienza University of Rome, Via Salaria 113, Rome, Italy
Keywords:
Variational Auto Encoders, Artificial Intelligence, Orthogonal Latent Code, Disentanglement, Hybrid,
Inter-Domain Signal Transfer, Image, Voice.
Abstract:
Auto Encoders are specific types of Deep Neural Networks that extract latent codes in a lower dimensional
space for the inputs that are expressed in the higher dimensions. These latent codes are extracted by forcing
the network to generate similar outputs to the inputs while limiting the data that can flow through the network
in the latent space by choosing a lower dimensional space (Bank et al., 2020). Variational Auto Encoders
realize a similar objective by generating a distribution of the latent codes instead of deterministic latent codes
(Cosmo et al., 2020). This work focuses on generating semi-orthogonal variational latent codes for the inputs
from different source types such as voice, image, and text for the same objects. The novelty of this work
is on aiming to obtain unified variational latent codes for different manifestations of the same objects in the
physical world using orthogonal latent codes. In order to achieve this objective, a specific Loss Function has
been introduced to generate semi-orthogonal and variational latent codes for different objects. Then these
orthogonal codes have also been exploited to map different manifestations of the same objects to each other.
This work also uses these codes to convert the manifestations from one domain to another one.
1 INTRODUCTION
The VAEs are able to generate latent codes for the
data where these latent codes can be later used to gen-
erate new samples or used for other purposes such as
noise removal. However, in the original version of the
VAEs, there is no way to place the latent codes in the
desired places in the latent space. These codes are
generated through the training process automatically
and the trainer has almost no control over their loca-
tion. This can be problematic in certain cases when
there is an interest in obtaining a certain code in the
latent domain. Moreover, the generated code for the
same objects with different manifestations will be dif-
ferent. For instance, if there is an image of an ”Ap-
ple”, and the recorded voice of the word ”Apple”, the
generated latent code will be different for them since
the data domain is different. However, having a com-
mon code for the same features would be useful. This
is very similar to the human brain which is able to
comprehend a feature or an object such as an apple de-
spite the fact that the incoming data might have differ-
ent data domains. Most of the research on the VAE is
a
https://orcid.org/0000-0003-3771-1255
b
https://orcid.org/0000-0003-0091-7241
concentrated over a single domain of the data. There
is limited research on a network with the capability of
handling data coming from different domains of the
data.
This work aims to propose a method using which
it is possible to generate similar codes for the same
features coming from different data domains. The
method uses orthogonal codes in the latent domain
for each unique feature. Then these codes are used
to transfer the data from one domain to another one.
More specifically this work shows the possibility of
transferring voice signals to the image domain. The
applications of such a system are countless ranging
from search engines to creating an AI technology with
the capability of processing information from multi-
ple channels and combining them. In addition, having
unique codes provide the possibility to develop spe-
cialized networks independently over separate data
domains and integrate them later.
2 RELATED WORKS
Artificial Neural Networks (ANN) are a set of net-
works inspired by biological neural networks. These
Solhjoo, B. and Rodolà, E.
Latent Code Disentanglement Using Orthogonal Latent Codes and Inter-Domain Signal Transformation.
DOI: 10.5220/0011860200003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 427-436
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
427

networks are constructed from a set of neurons that
simply sum up the inputs from other neurons or in-
puts with a specific weight and then apply an activa-
tion function over the results. Each neuron might be
interconnected with many other neurons. Assuming
the use of non-linear activation functions in these net-
works, these complex networks can be used to solve
and address complex problems(Hopfield, 1985)(Guo
et al., 2022).
In (Hopfield, 1985), the authors use ANN net-
works to show the possibility of using these net-
works for optimizing different problems. The authors
specifically apply these networks to Traveling Sales-
man Problem which is known as a complex optimiza-
tion problem and represent its power over solving this
problem.
In the literature different ANN architectures are
proposed to address different sets of problems. Dis-
crete Hopfield Neural Networks (DHNN), is a spe-
cific type of ANN network that is designed to address
the combinatorial problem. These networks divided
the neurons into the input and output neurons and neu-
rons are either in bipolar (-1,1) or binary (0,1) states.
The lack of a symbolic rule to represent the connectiv-
ity of the neurons is one of the problems in the DHNN
networks. In (Guo et al., 2022), authors propose a
novel logical rule that is capable of mixing system-
atic logical rules with non-systematic logical rules by
exploiting a random clause generator.
The Variational Auto Encoders are another type
of ANN network that can be used in different fields
such as compressing, de-noising, and generating data.
These networks are constructed from two main parts
known as Encoder and Decoder. Encoders and De-
coders are constructed using multi-layers of neural
networks. The network has a bottleneck in the middle
with a low capacity to pass the information from the
Encoder network to the Decoder side of the network
forcing the system to generate a lower dimensional
representation of each signal known as latent codes.
In (Cosmo et al., 2020) VAE is used to generate de-
formable 3D shapes with higher accuracy. This sys-
tem uses a disentanglement technique by dividing the
latent space into two sub-spaces, one part dedicated
to intrinsic features of the 3D shapes and the other to
extrinsic features of the shape. By this method, each
sub-space of the latent code stores a specific type of
data related to the object. This algorithm uses three
Loss Functions for training which are Reconstruc-
tion, Interpolation, and Disentanglement. The Dis-
entanglement Loss term itself is also obtained from a
combination of two terms that are disentanglement-
int, and disentanglement-ext.
In (Pu et al., 2016), a specific configuration of
VAE is used to predict the labels and captions for the
images. In this system, a Convolutional Neural Net-
work (CNN) is used as an encoder and a Deep Gen-
erative Deconvolutional Network (DGDN) as a de-
coder. The mentioned latent codes are also fed into a
Bayesian Support Vector Machine (BSVM) to gener-
ate labels. It is also connected to a Recurrent Neural
Network (RNN) to generate captions for the images
using their latent code. In this work, the latent space is
shared between the DGDN network which is respon-
sible for decoding and reconstruction of the images,
and the BSVM or RNN network. The training of the
network has been done by minimizing the variational
lower bound of the Cost Function.
In (Venkataramani et al., 2019), a VAE is used for
source separation. To realize this objective this sys-
tem learns a shared latent code space between mixed
and clear voice signals. This work considers source
separation as a style transfer problem in VAEs. It as-
sumes the mixture data is actually a clean voice mixed
up with some noises and hence the objective of the
network is to transfer the style of input and represent
it as the output which is a clean form of the signal.
In (Sadeghi and Alameda-Pineda, 2020) and
(Sadeghi et al., 2020), VAEs have been used to en-
hance voice quality using audio-visual information.
This model exploits the visual data of lips movements
in addition to the audio data. The main idea is that
although the voice might be recorded improperly or
degraded by the noise, the visual data of lip move-
ments are mostly untouched and extractable. In this
work, the Short Time Fourier Transform (STFT) of
the voice is extracted in the first step which provides
the frequency representation of the voice signals in
each time frame. The VAE is trained using these bins
and learns the latent domain distribution for the voice
signals. The lower bound of the Likelihood Function
ELBO is maximized to estimate the parameters of the
network. In addition to this Audio VAE (AVAE) net-
work, this method introduces two networks to fetch
the speech data from the visual inputs which are re-
ferred to as Base Visual VAE (BVVAE) and Aug-
mented Visual VAE (AVVAE). The inputs of these
networks are actually lips images that are captured
and centered using computer vision methods. The
BVVAE is a two-layered fully connected network.
Finally, in order to obtain a combined audio-visual
model, the Conditional VAE (CVAE) framework has
been exploited. For training the combined model, the
network is provided with the data as well as the re-
lated class labels in order to estimate the data distri-
bution.
In (Palash et al., 2019), the authors use a VAE
in processing the textual data in order to transfer the
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
428
style of the text. More specifically, a VAE is used to
convert positive texts to negative ones and vice versa.
To do so, an encoder network is implemented fol-
lowed by two different decoders. One of the decoders
is responsible for generating positive styles and the
other is responsible to generate negative styles. The
sentences are given associated with some tags. These
tags are converted to numerical values ranging from
-2 to 2 which represent ”Surely Negative”, ”Slightly
Negative”, ”Neutral”, ”Slightly Positive” and ”Surely
Positive” and evaluation is done by the resultant nu-
merical values.
In (Wang et al., 2018), the authors reviewed the
use of the KL Divergence Function. In the normal
VAEs, KL divergence is used to compare the similar-
ity of two distributions. However, there are two main
problems with KL divergence measure. First, the KL
divergence does not satisfy the trigonometric distance
Equation. It means that there is no clear relation be-
tween D
KL
(P||Q) + D
KL
(Q||L) and D
KL
(P||L). The
other problem is related to the fact that the divergence
increases as the overlap between two distributions de-
creases which means that if two distributions do not
have any overlap the divergence will increase to in-
finity and consequently the gradient will be lost. To
solve these problems, in this method, Hellinger dis-
tance is exploited along with CVAE to produce music.
The Hellinger distance is non-negative, symmetric,
and trigonometric. The generated music results with
Helinger distance provide a better subjective feeling
and also need lower latent space dimensions to gen-
erate the same music in comparison to the original
model.
In (Wang et al., 2019), a Gated Recurrent Unit
(GRU) is exploited to build a Variational Recurrent
Auto-Encoders (VRAE) to model music generation in
the symbolic domain. In this system, there are three
GRU encoders that are responsible to encode the note
features dT
t
, T
t
, and P
t
. Another GRU in the encoder
is responsible to capture the context vector from the
other three encoders. The note unrolling is realized
by a decoder network which is composed of 7 GRUs.
Three of these GRUs are responsible for modeling
attribute-specific context. One is modeling the con-
textual unit and three are for constructing the note el-
ements. The hierarchical decoder proceeds with note
generation in three steps. First, it produces the dT
t
based on note
t−1
. Then using this information and
again using note
t−1
the T
t
is extracted. In the final
step using all previous information, the pitch is gen-
erated.
As mentioned although these works apply the
VAEs to different domains of the data, they are con-
centrated only on one specific domain. Also, there
Table 1: Hardware used for training and testing the Voice
VAE.
Minimum hardware requirements for Voice VAE
Device Specifications
CPU Intel(R) Core(TM) i7-8750H @2.20
2.21 GHz
GPU NVIDIA GeForce RTX 2070 with
Max-Q Design
Disk 512GB SSD + 1TB HDD
RAM 32.0 GB
Type 64bit
is almost no control over the placement of the la-
tent codes in the latent domain. In the next section,
we propose a method for constructing a model using
which a specific code can be generated in the latent
domain for the object signals coming from the differ-
ent signal domains.
3 PROPOSED MODEL
In this work, we propose a system that is able to gen-
erate similar orthogonal codes for the same features
of the objects coming from different data domains.
The method described in this section is tested over the
voice, image, and text domains, however, the method
can be generalized to any other domains. The details
of the hardware used to train and test the models are
listed in Table 1.
3.1 Voice Model
The first model is designed to generate unique orthog-
onal codes for the voice signals. The dataset used for
this purpose is the MNIST-Voice dataset. The model
is constructed using a 10-layer encoder and 10-layer
decoder network. The encoder and decoder networks
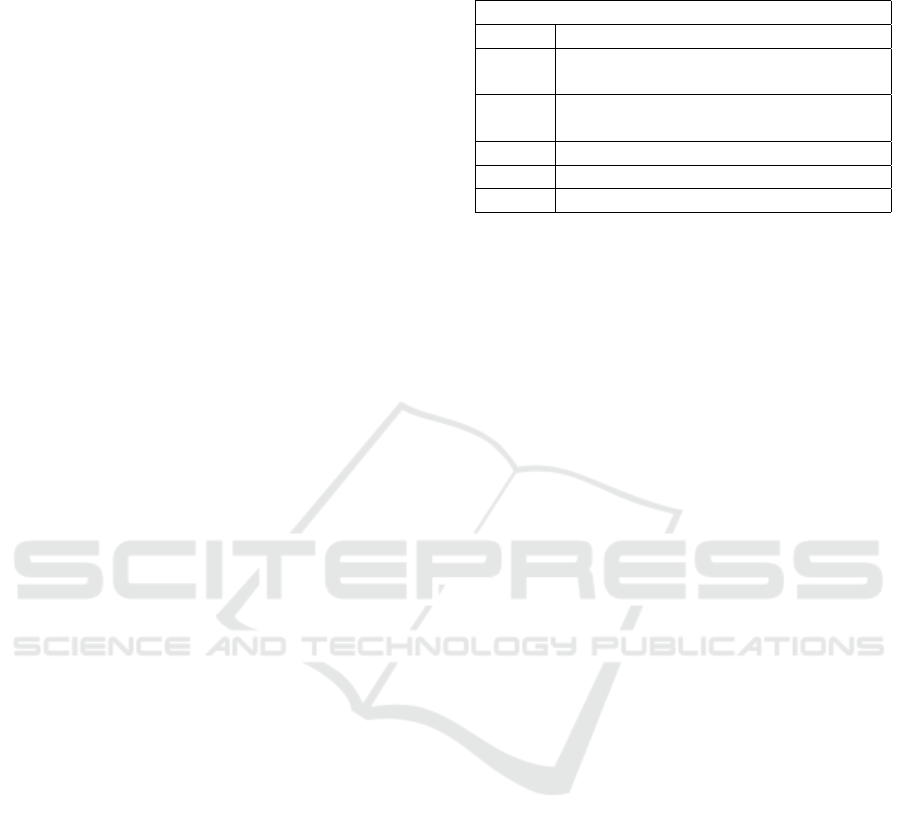
are chosen to be symmetric. Figure 1 represents the
model structure.
The first and last layers of the encoder and decoder
networks are normalization layers. In this layer, a new
normalization method is implemented and we call it
Max M% normalization. This method sorts the sig-
nals from the maximum value to the minimum. Then
the M value with the maximum amplitude is selected
and their average is calculated. The signal is nor-
malized using this value. This normalization method
gives better results in comparison to simple max nor-
malization or STD normalization.
Table 2 lists the details of the layers in this net-
work. The Activation Functions of each layer is se-
lected to be Relu in order to add non-linearity to the
model while avoiding the problems caused vanishing
Latent Code Disentanglement Using Orthogonal Latent Codes and Inter-Domain Signal Transformation
429
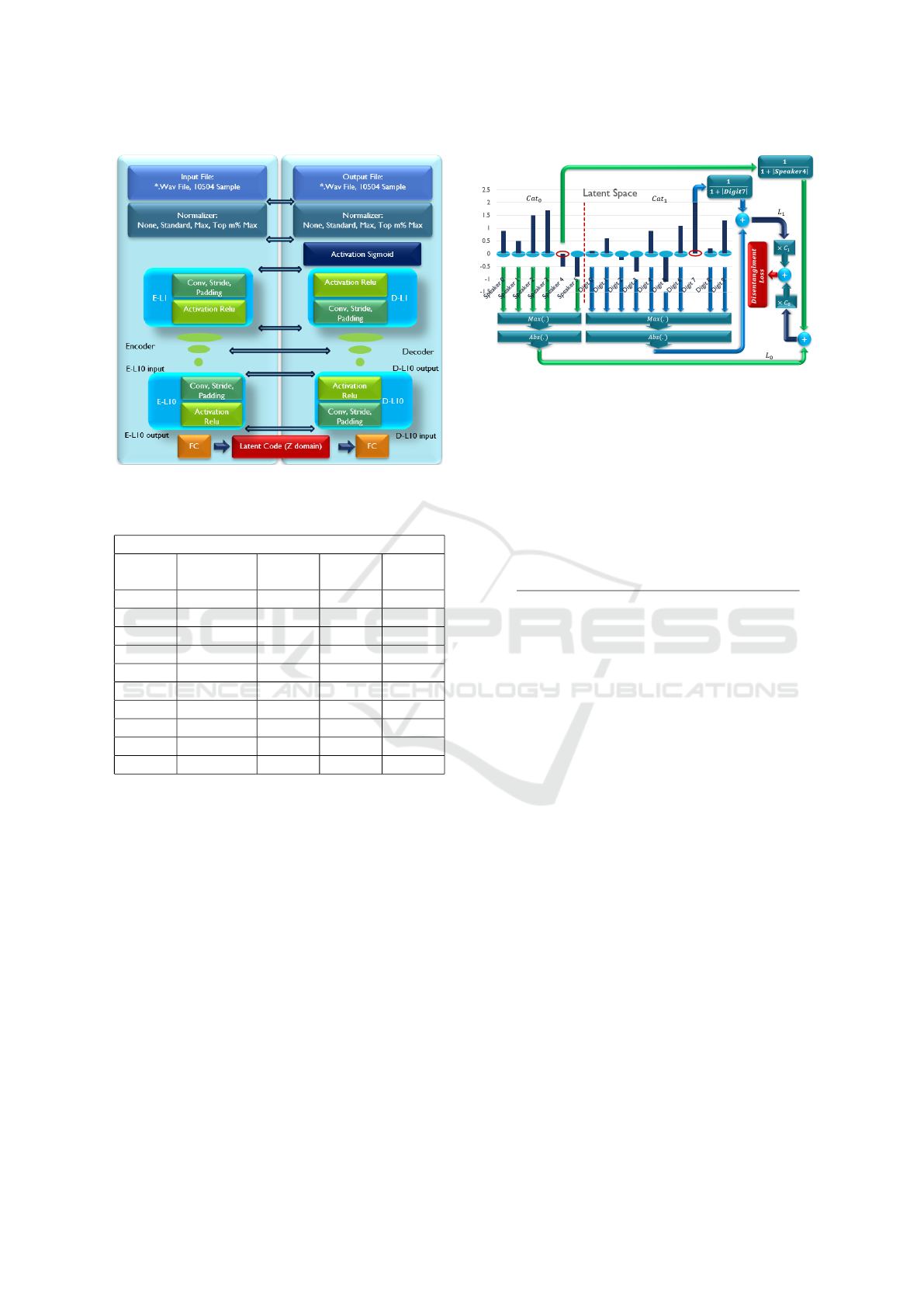
Figure 1: Proposed Voice VAE architecture.
Table 2: Convolutional layer details for Voice VAE.
Details of each convolutional layer for Voice-VAE
Layer
Index
Output
Channels
Kernels
Size
Stride Padding
L1 1026 64 16 1
L2 285 32 8 1
L3 79 16 2 1
L4 76 8 1 1
L5 73 7 1 1
L6 70 6 1 1
L7 67 5 1 1
L8 64 4 1 1
L9 62 4 1 1
L10 60 3 1 1
gradient. Only in the last layer, in the decoder side
there is also a Sigmoid Activation Function in order to
smooth the generated signal, suppress the spike values
and normalize it between 0 and 1.
After the convolutional layers, there is a fully
connected layer and its output is flattened. The la-
tent domain is logically divided into categories. The
codes obtained from the fully connected layer are nor-
malized using the related category vector amplitude.
Then the sampling is done using a Gaussian distribu-
tion and the result is fed into the decoder. The sam-
pling distribution’s mean value is obtained by the en-
coder. The standard deviation of the distribution is
proportional to the mean value plus a constant value
as stated in the (1).
σ
Sampling
= µ.l + σ
min
(1)
In Equation (1), l stands for the normalized la-
Figure 2: Disentanglement Loss calculation procedure.
tent code. Also, µ and σ
min
are the hyperparameters.
The latent domain is selected to be 16-dimensional
for the Voice model since there are 6 speakers and
10 digits. The orthogonal code generation is real-
ized by introducing a specific Disentanglement Loss
Function. The proposed Loss Function contains Re-
construction, Sparsity, Interpolation, and Disentan-
glement Loss that are expressed in Equation (2).
L =
B
0
M
r
I
r
L
r
+ B
1
M
s
I
s
L
s
+ B
2
M
i
I
i
L
i
+ B
3
M
d
I
d
L
d
B
0
M
r
I
r
+ B
1
M
s
I
s
+ B
2
M
i
I
i
+ B
3
M
d
I
d
(2)
In Equation (2), L
r
represents the Reconstruction
Loss which is obtained by the L2 norm distance be-
tween the original signal and the reconstructed signal.
L
s
represents the Sparsity Loss which is the L1 norm
distance between the original signals and the recon-
structed signals. L
i
is the Interpolation Loss. In or-
der to obtain the Interpolation Loss, two signals such
as S
1
and S
2
are selected and combined using a ran-
dom value linearly. This original combined signal is
denoted as S
co
. The original signals are fed into the
encoder network and their corresponding latent codes
are obtained. These latent codes are denoted as L
1
and
L
2
. The combination of these latent codes with the
same random value is calculated and fed into the de-
coder. The resultant signal is denoted as S
cd
. The L2
norm distance between the S
cd
and S
co
is considered
as Interpolation Loss. Equation (3) and (4), describe
the calculation of the Interpolation Loss.
L
i
= |S
co
− S
cd
|
2
(3)
L
i
= |αS
1
+ (1 − α)S
2
− Dec(αl
1
+ (1 − α)l
2
)|
2
(4)
L
d
is the Disentanglement Loss. Figure (2) de-
scribes the procedure of the Disentanglement Loss
calculation.
In the training of the voice model, the MNIST-
Voice dataset has been used. This dataset contains the
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
430
Table 3: Importance Factors in the Loss Function.
Loss Function Importance Factors for Voice VAE
Parameter Value
Reconstruction Importance 1
Sparsity Importance 0.3
Interpolation Importance 0.02
Disentanglement Importance of Speakers 0.25
Disentanglement Importance of Digits 0.25
voice of 6 speakers who have recorded the digits 0 to
9. Hence, to train this model we have assumed that
the latent space is 16 dimensional where the first 6 di-
mensions store the data for each speaker, and the later
10 dimensions store the data for the digits. The speak-
ers are considered as cat0 and digits are considered as
cat1. For a more sophisticated dataset, we might have
more categories. For each category, the Disentangle-
ment Loss is calculated as Equation (5).
L
d, j
= Max(cat
j
)|
f
k
6=i
+
1
1 + | f
i
|
(5)
Where in Equation (5), Max(cat
j
)|
f
k
6=i
calculates
the maximum latent value for the unrelated latent di-
mensions and
1
1+| f
i
|
calculates the Loss for the related
latent dimension. Hence, if unrelated latent dimen-
sions have a high value the first term will increase.
The second term on the other hand will decrease if
the related latent dimension has a high value. Hence,
minimizing this term will result in suppressed values
in unrelated dimensions while reinforcing the values
in the related dimensions in the latent space. This
Loss is calculated for each category (in this case for
the Speakers and Digits category) and the results are
summed up using a coefficient.
In (2), the I
r
, I
s
, I
i
and I
d
represents the importance
coefficients of the Loss terms. Notice that I
d
and L
d
are denoted symbolically as one Loss term here but in
fact, it contains the Loss terms for two categories and
there are two importance coefficients, one for each
category. Table 3 represents the importance coeffi-
cients used in the network training.
The network is trained in the beginning using only
the Reconstruction Loss and then in the later itera-
tions, other Loss terms are introduced. This is done to
make the system more stable and force it to converge
to an area that is proper from a reconstruction point of
view. The injection of new Loss term causes a spike in
the overall Loss. Because the network is not adopted
in accordance with the new Loss term. Hence, M
r
,
M
s
, M
i
, and M
d
multipliers are considered to smooth
the spikes in Loss Function as the iteration index in-
crease. These multipliers are equal to zero until a cer-
tain iteration that are denoted as Start Iterations and
they increase to 1 linearly according to Equation (6)
Table 4: Training iterations for Voice VAE.
Training Start/Stop Iterations for Voice VAE
Iteration of Loss Term Iteration Index
Reconstruction Start 1
Sparsity Start 6000
Sparsity Stop 6100
Interpolation Start 6500
Interpolation Start 6600
Disentanglement Start 6800
Disentanglement Start 7300
Overall Training Stop 10000
as the number of iterations increases and new Loss
terms are added. These multipliers stay steady at 1
once they reach a certain iteration and are denoted as
Stop Iteration. Table 4 represents the Start and Stop
Iterations for multipliers.
M
EachLossTerm
=
Interation
Current
− Iteration
Start
I ter ation
Stop
− Iteration
Start
(6)
The last coefficients in the (2) are B
0
to B
3
. During
the training, it can be seen that for some Importance
coefficient values in the Loss Function some of the
Loss terms increase in favor of other terms that de-
crease. It causes a divergence for some Loss terms
during the training. Although it results in the mini-
mization of the overall Loss Function, we are more
interested in the scenario in which all Loss terms de-
crease or are near to each other even though the over-
all decrease in Loss Function is lesser than the case
in which one Loss term increases considerably and
others decrease. Hence, once the Loss terms are cal-
culated after applying Importance coefficients and in-
jection Multipliers, the obtained Loss terms are sorted
from max to min. Then for the maximum term, a co-
efficient with a high value is applied, while for the
smaller Loss terms, a smaller coefficient is applied.
This results in a schema in which the Loss term with
the highest value will have the highest importance to
decrease. However, once it is reduced enough such
that it becomes the second biggest Loss term, its im-
portance will be reduced for the optimizer, and hence
the optimizer does not continue to decrease this Loss
term with the cost of keeping other Loss terms in
higher values. Table 5 represents the coefficients ap-
plied to lose terms according to their amplitude during
the training. Figure 3 represents the effect of applying
the B
i
coefficient.
The reconstructed signal sample is depicted in
Figure 4. The audio signals are available on the
GitHub page of the paper (Solhjoo, b), (Solhjoo, a),
(Solhjoo, c).
Figure 5 and 6 represent the average value of the
Latent Code Disentanglement Using Orthogonal Latent Codes and Inter-Domain Signal Transformation
431
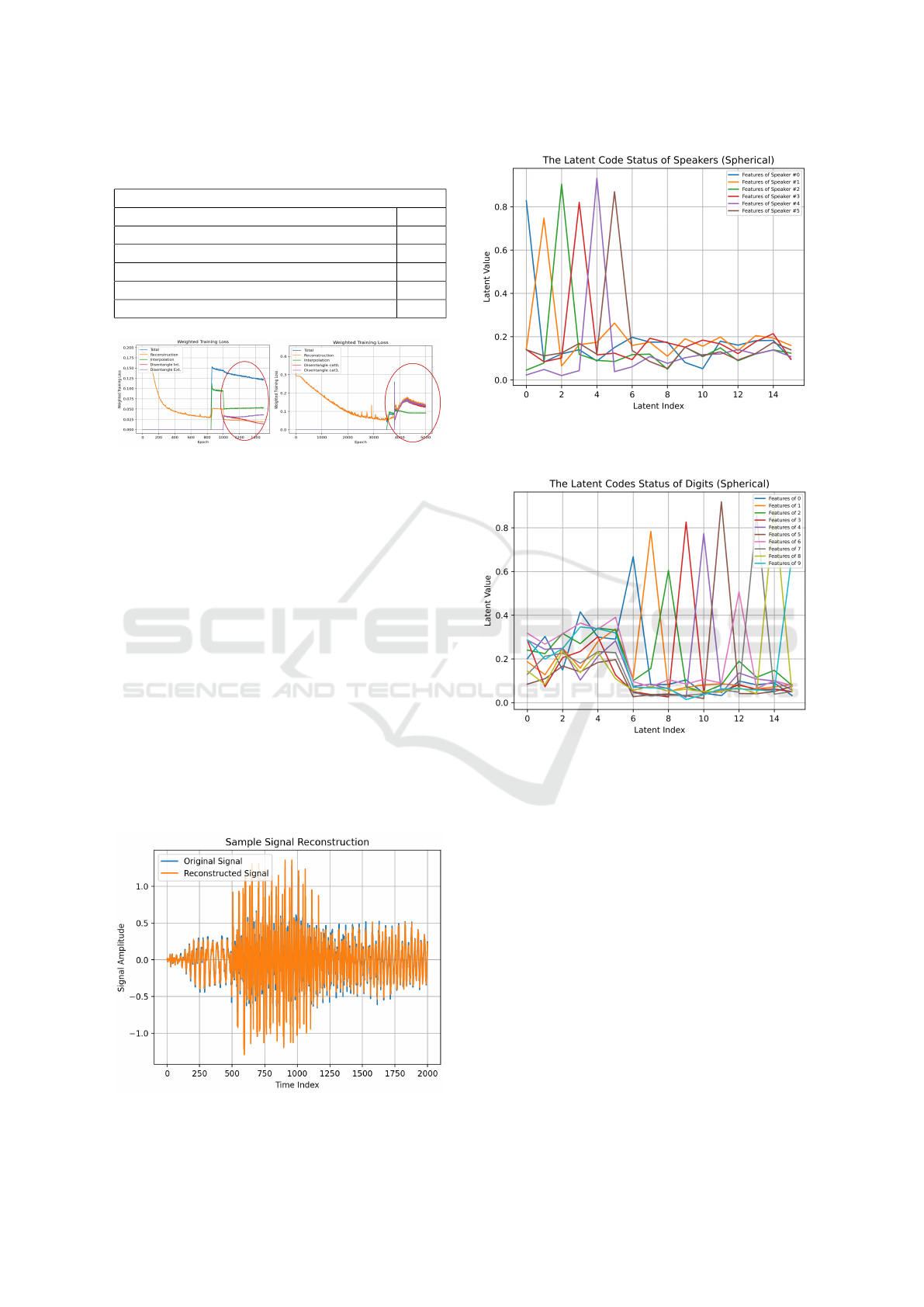
Table 5: Loss term Balancing Factors with respect to their
amplitude.
Loss Terms Balancing Coefficients for Voice VAE
Maximum Loss Terms (Descending Order) Value
Max0 1
Max1 0.5
Max2 0.4
Max3 0.3
Max4 0.2
Figure 3: Left: Loss terms divergence without B
i
Factors;
Right: Loss terms convergence with B
i
Factors.
generated latent codes for different speakers and dig-
its respectively. To obtain these figures the latent
codes are normalized using the latent code amplitude.
Hence the dimension with the highest amplitude for
a feature implicitly means that most of the data are
encoded in that dimension. The figures represent the
proper disentanglement between the latent for differ-
ent features. Although the generated codes are not
exactly orthogonal they resemble this feature to a no-
ticeable extent.
3.2 Image Model
We also trained a model for digit images using the
MNIST-Image dataset. The methodology for train-
ing the image VAE is very similar to the one applied
in the Voice VAE. The only difference is in the fact
Figure 4: Sample voice signal reconstruction.
Figure 5: Average value of the latent codes for speakers in
Voice VAE.
Figure 6: Average value of the latent codes for the digits in
Voice VAE.
that the convolutional layers for the Voice VAE are 1-
dimensional while for Image VAE are 2-dimensional.
Table 6 represents the details of the convolutional lay-
ers for the Image VAE. In this network, each layer is
followed by a Relu Activation Function. In the last
layer of the decoder network, there is also a Sigmoid
Activation Function for the same reasons explained in
the voice model.
Table 7 represents the important Factors used in
Image VAE training. The MNIST-Image dataset
contains different digits with different hand-writings.
However, there is no detail about different writers.
Hence here it has been assumed that all digits are writ-
ten by a single writer. Accordingly, the latent space
for the Image-VAE is selected to be 11 dimensional
where 1 dimension is dedicated to the writer and 10
dimensions for the digits. Since there is only one
writer, it is already known that all writings belong to
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
432
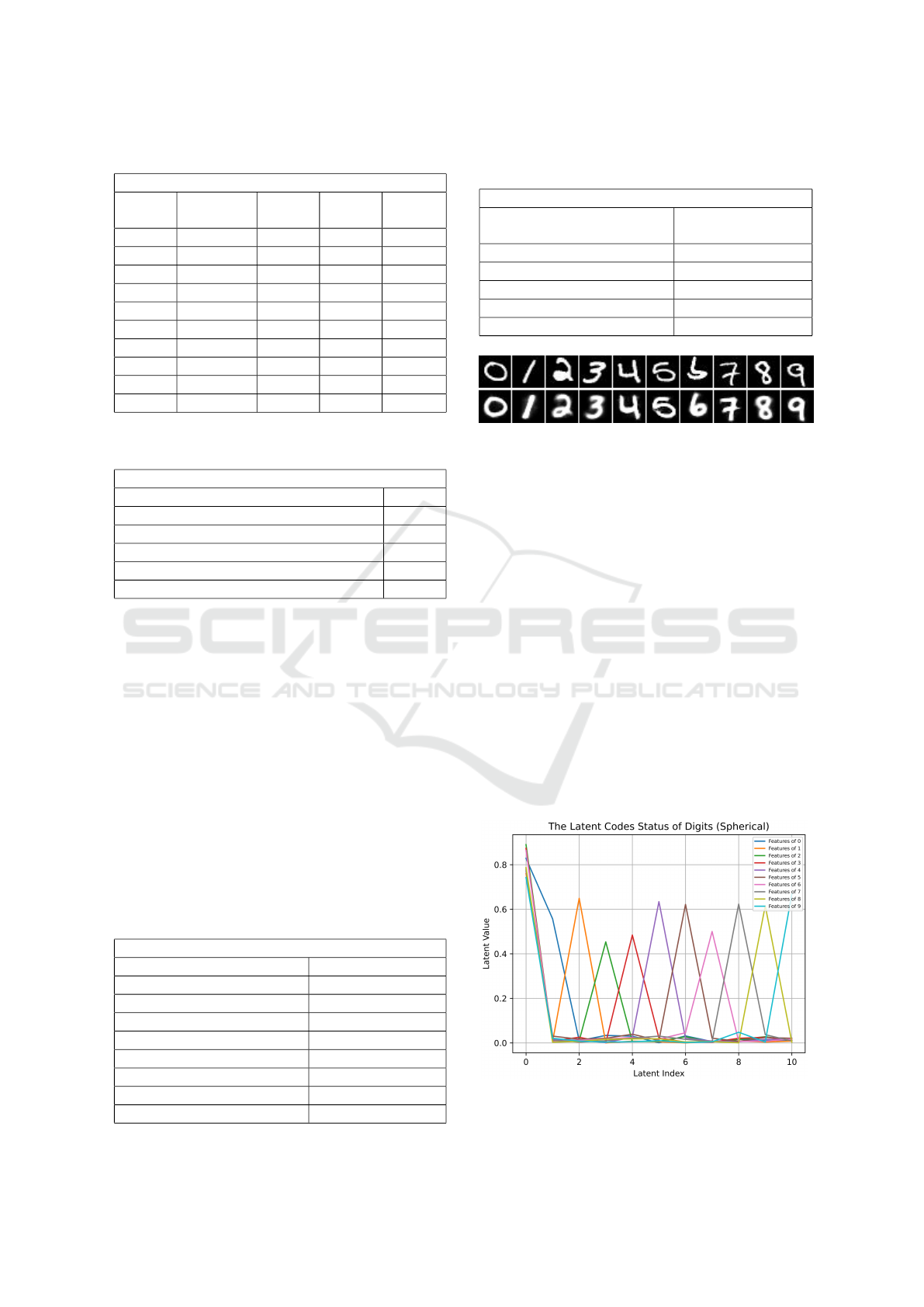
Table 6: Convolutional layer details for Image VAE.
Details of each convolutional layer for Image VAE
Layer
Index
Output
Channels
Kernels
Size
Stride Padding
L1 1012 7 2 1
L2 405 5 1 1
L3 162 3 1 1
L4 115 3 1 1
L5 82 3 1 1
L6 59 3 1 1
L7 42 3 1 1
L8 30 3 1 1
L9 21 3 1 1
L10 15 3 1 1
Table 7: Importance Factors in the Loss Function for Image
VAE.
Loss Function Importance Factors for Image VAE
Parameter Value
Reconstruction Importance 1
Sparsity Importance 0.3
Interpolation Importance 0.02
Disentanglement Importance of Writers 0
Disentanglement Importance of Digits 0.4
a specific writer and hence the Disentanglement Im-
portance Factor for the writer is selected to be zero.
The Image-VAE is trained for 800 iterations. The
Start and Stop Iterations for Loss terms in the Image-
VAE training are listed in Table 8.
The Loss terms Balancing Factors for Image VAE
are similar to Voice VAE and it is listed in Table 9.
The trained model performance for reconstructing
images is depicted for some samples in Figure 7.
The latent codes generated for different digits are
averaged and depicted in Figure 8. As depicted in the
figure the latent codes for digits are almost orthogonal
and separated. The latent code in the first dimension
always has a high value as it represents the writer and
it was assumed that there is only one writer for all
digits.
Table 8: Training iterations for Image VAE.
Training Start/Stop Iterations for Image VAE
Iteration of Loss Term Iteration Index
Reconstruction Start 1
Sparsity Start 400
Sparsity Stop 410
Interpolation Start 450
Interpolation Start 460
Disentanglement Start 480
Disentanglement Start 530
Overall Training Stop 800
Table 9: Loss term Balancing Factors with respect to their
amplitude.
Loss Terms Balancing Coefficients for Image VAE
Maximum Loss Terms By
Descending Order
Coefficient
Value
Max0 1
Max1 0.5
Max2 0.4
Max3 0.3
Max4 0.2
Figure 7: Reconstructed images using the Image VAE.
Up row are the original images; below row are the recon-
structed images.
At this point, we have two networks that are able
to generate similar codes for the same features (for
instance digit 5) despite the fact that their data do-
mains are very different. Now if, for instance, the
character ”5” is associated with a code such as ”1-
0000010000” then this image can be generated in-
stantly. Hence, it can be observed that this method
provides an immediate possibility to generate the tex-
tual characters using latent codes and vice versa. Fig-
ure 9 represents the generated digits that are obtained
from the hand-crafted orthogonal codes such as ”1-
0000010000”. This should be noticed that the gener-
ated codes in the latent domains are not exactly 0 in
unrelated dimensions hence some imperfections can
be seen in these images specifically in digit 4. The
decoded images for hand-crafted codes presented in
Figure 9 aim to demonstrate that even an approxima-
Figure 8: Average value of the latent codes for the digits in
Image VAE.
Latent Code Disentanglement Using Orthogonal Latent Codes and Inter-Domain Signal Transformation
433
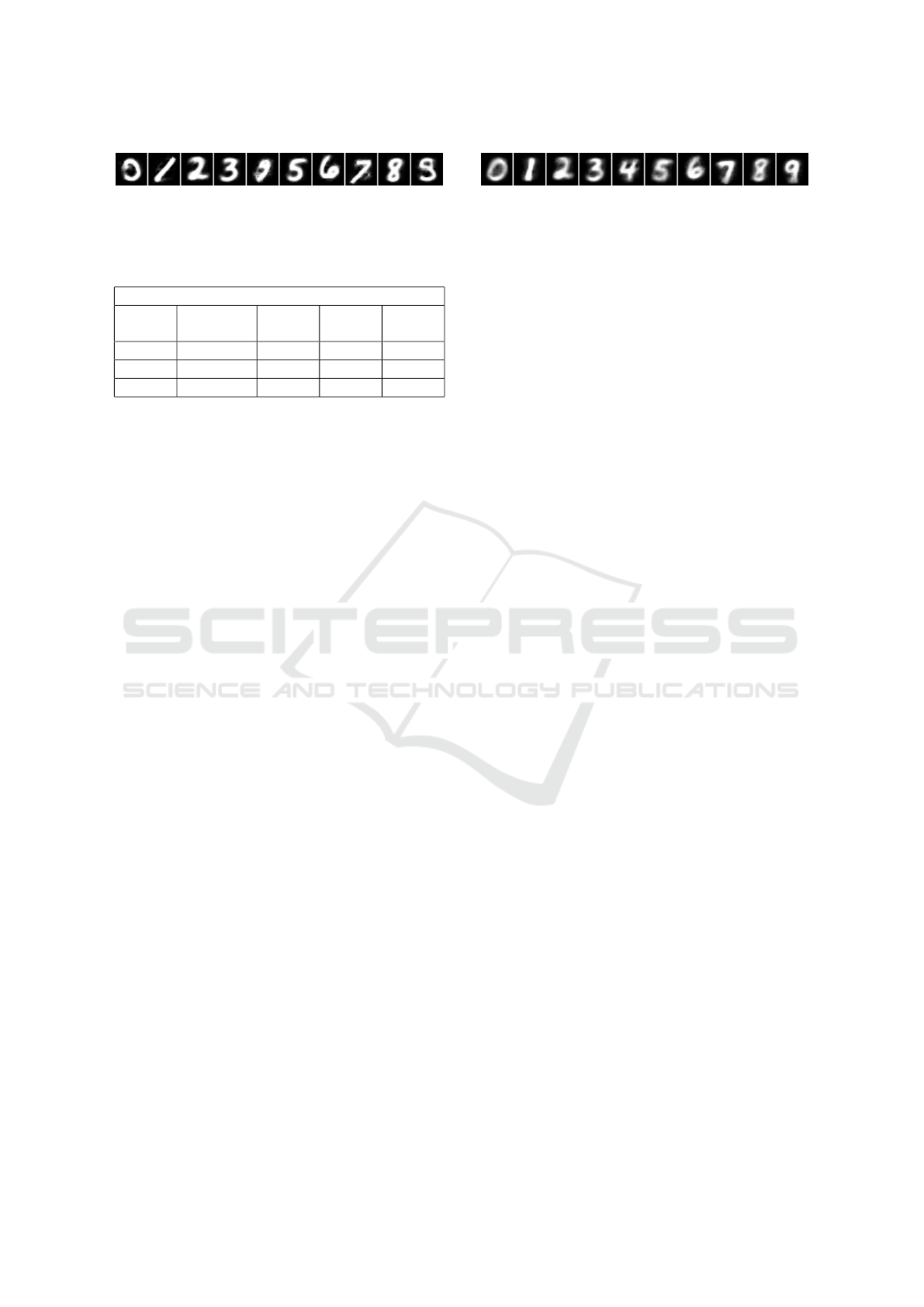
Figure 9: Image generation using handcrafted orthogonal
codes.
Table 10: Convolutional layer details for the bridge net-
work.
Details of each convolutional layer for Bridge Net
Layer
Index
Output
Channels
Kernels
Size
Stride Padding
L1 64 3 1 1
L2 64 3 1 1
L3 64 3 1 1
tion over the latent codes can generate acceptable out-
puts.
3.3 Inter-Domain Signal
Transformation: Voice to Image
Noting the fact that the latent codes obtained from dif-
ferent signal domains are very similar to each other
using the proposed method, we compose a hybrid
network in this section. This hybrid network takes
the encoder network of the Voice VAE and the de-
coder network of the Image VAE. The objective is to
generate an image using the related voice. The only
problem here is that the latent space for the Image
VAE is 11-dimensional while for Voice VAE is 16-
dimensional. Hence, we also create a thin bridge net-
work to map 16-dimensional space to 11 dimensions.
An alternative for this method is to simply remove the
speaker category section of the latent codes obtained
from the Voice VAE and only feed the digits part to
the image decoder. If this alternative approach is se-
lected, a high value (' 1) should be inserted in the
first dimension of the crafted latent code in the writer
position since there is only one writer position in the
latent space.
The details of the bridge network designed for
mapping the voice latent to image latent are listed in
Table 10.
The bridge network is trained lightly using the
voice signals as the input of the Voice VAE encoder
and corresponding images in the output of the Image
VAE decoder. For training the bridge network, only
the Reconstruction Loss is considered. Figure 10 rep-
resents the sample results obtained from the conver-
sion of the voice signals to the images and it reflects
the fact that the conversion of the signal domain using
orthogonal encoding in the latent domain is possible
and provides acceptable results.
The hyper-parameters mentioned in Table 2 to Ta-
Figure 10: Images constructed from voice signals.
ble 10 are obtained empirically by training different
models and observing the results. To do so more than
100 models are trained for the Voice VAE. A similar
approach has been taken for Image and Bridge Net-
works. The enlisted parameters seem to provide bet-
ter audio-visual results.
4 CONCLUSIONS
In this work, we presented a method that is capable to
generate unique and orthogonal codes for the features
coming from different signal domains. This method
provides the possibility to train specialized networks
for different domains of data separately and then com-
bine their results in the latent domain. It is also rep-
resented that it is possible to create hybrid systems
using which the data can be transferred from one do-
main to another one. In this paper, we used voice,
image, and textual data domains to show the power of
this method and obtained acceptable results.
REFERENCES
Bank, D., Koenigstein, N., and Giryes, R. (2020). Autoen-
coders. arXiv preprint arXiv:2003.05991.
Cosmo, L., Norelli, A., Halimi, O., Kimmel, R., and
Rodol
`
a, E. (2020). LIMP: Learning latent shape rep-
resentations with metric preservation priors. In Com-
puter Vision – ECCV 2020, pages 19–35. Springer In-
ternational Publishing.
Guo, Y., Kasihmuddin, M. S. M., Gao, Y., Mansor, M. A.,
Wahab, H. A., Zamri, N. E., and Chen, J. (2022).
Yran2sat: A novel flexible random satisfiability logi-
cal rule in discrete hopfield neural network. Advances
in Engineering Software, 171:103169.
Hopfield, J.J., T. D. (1985). “neural” computation of deci-
sions in optimization problems. Biological Cybernet-
ics, 52:141–152.
Palash, M. H., Das, P. P., and Haque, S. (2019). Sentimental
style transfer in text with multigenerative variational
auto-encoder. In 2019 International Conference on
Bangla Speech and Language Processing (ICBSLP),
pages 1–4.
Pu, Y., Gan, Z., Henao, R., Yuan, X., Li, C., Stevens, A.,
and Carin, L. (2016). Variational autoencoder for deep
learning of images, labels and captions. In Lee, D.,
Sugiyama, M., Luxburg, U., Guyon, I., and Garnett,
R., editors, Advances in Neural Information Process-
ing Systems, volume 29, pages 2352–2360. Curran
Associates, Inc.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
434

Sadeghi, M. and Alameda-Pineda, X. (2020). Robust un-
supervised audio-visual speech enhancement using a
mixture of variational autoencoders. In ICASSP 2020
- 2020 IEEE International Conference on Acoustics,
Speech and Signal Processing (ICASSP), pages 7534–
7538.
Sadeghi, M., Leglaive, S., Alameda-Pineda, X., Girin, L.,
and Horaud, R. (2020). Audio-visual speech enhance-
ment using conditional variational auto-encoders.
IEEE/ACM Transactions on Audio, Speech, and Lan-
guage Processing, 28:1788–1800.
Solhjoo, R. https://github.com/babak-solhjoo/image-vae-
results.
Solhjoo, R. https://github.com/babak-solhjoo/voice-vae-
results.
Solhjoo, R. https://github.com/babak-
solhjoo/voice2imagevae.
Venkataramani, S., Tzinis, E., and Smaragdis, P. (2019). A
style transfer approach to source separation. In 2019
IEEE Workshop on Applications of Signal Processing
to Audio and Acoustics (WASPAA), pages 170–174.
Wang, Y., Hu, T., Wang, Z., Cai, J., and Du, H. (2018).
Hellinger distance based conditional variational auto-
encoder and its application in raw audio generation.
In 2018 IEEE 18th International Conference on Com-
munication Technology (ICCT), pages 75–79.
Wang, Y.-A., Huang, Y.-K., Lin, T.-C., Su, S.-Y., and Chen,
Y.-N. (2019). Modeling melodic feature dependency
with modularized variational auto-encoder. In ICASSP
2019 - 2019 IEEE International Conference on Acous-
tics, Speech and Signal Processing (ICASSP), pages
191–195.
APPENDIX
A pseudo-code for training a VAE with orthogonal la-
tent codes is presented below:
//Initializing M_i values
M_Reconstruction=1
M_Sparity=0
M_Interp=0
M_Disent=0
//Training over iterations
for Iteration in range(0,MaxIter):
//Signal normalization
Signal[l]=SignalBatchSampler()
SortedSig[l]=Sort(Signal)
NormFactor[l]=Average(SortedSig[l,0:M])
NormalizedSig[l]=Signal[l]/NormFactor[l]
//Encoding signal
PrimaryLatent[l]=Encoder(NormalizedSig[l])
//Normalize each category in latent code
for all categories in PrimaryLatent[l]:
{
NormCat[l,i]=L2Norm(Cat[l,i])
LatentCode[l]=
Concatination[Cat[l,i]/NormCat[l,i]]
}
//Resampling
SampStd[l]=LatentCode[l]*L+Std_min
LatentRe[l]=
Gaussian(SampStd[l], Latent[l])
//Decoding the signal
RecSignal[l]=Decoder(LatentRe[l])
//Output signal normalization
SortedRecSig[l]=Sort(RecSignal[l])
NormFactorRec[l]=Average(SortedSig[l,0:M])
NormRecSig[l]=RecSignal[l]/NormFactorRec[l]
//Calculating Reconstruction Loss
RecLoss[l]=
L2Norm(NormRecSig[l]-NormalizedSig[l])
//Calculating Sparsity Loss
SparsityLoss[l]=
L1Norm(NormRecSig[l]-NormalizedSig[l])
//Calculating Interpolation Loss
//Sampling and normalizing another signal
Signal[k]=SignalBatchSampler()
SortedSig[k]=Sort(Signal)
NormFactor[k]=Average(SortedSig[k,0:M])
NormalizedSig[k]=Signal[k]/NormFactor[k]
//Calculating latent code for the 2nd signal
PrimaryLatent[k]=Encoder(NormalizedSig[k])
//Normalize each category in latent code
for all categories in PrimaryLatent[k]:
{
NormCat[k,i]=L2Norm(Cat[k,i])
LatentCode[k]=
Concatination[Cat[k,i]/NormCat[k,i]]
}
//Sample a value with uniform distribution
Rand=UniformRandom()
//Combine signals in the time domain
MixedOrigSig[l]=
Rand*NormalizedSig[l]+
(1-Rand)*NormalizedSig[k]
//Combine latent codes of original signals
MixedLatent[l]=
Rand*LatentCode[l]+(1-Rand)*LatentCode[k]
//Resampling
SampStd[l]=MixedLatent[l]*L+Std_min
MixedLatentRe[l]=
Gaussian(SampStd[l], MixedLatent[l])
//Reconstructed signal from mixed latent
LatentMixedRecSig[l]=Decoder(MixedLatentRe[l])
Latent Code Disentanglement Using Orthogonal Latent Codes and Inter-Domain Signal Transformation
435

SortedMixRecSig[l]=Sort(LatentMixedRecSig[l])
NormFactorMixRec[l]=
Average(SortedMixRecSig[l,0:M])
NormMixRecSig[l]=
MixedRecSignal[l]/NormFactorMixRec[l]
//Calculating Interpolation Loss
InterpolLoss[l]=
L2Norm(MixedOrigSig[l]-NormMixRecSig[k])
//Calculating Disentanglement Loss
DisentangleLoss = 0
for all Cat in PrimaryLatent[l,n]:
{
UnrelatedDims=
Exclude(Related dimension in Cat)
PartialUnrelateLoss=Max(UnrelatedDims)
PartialRelatedLoss=1/(1+PrimaryLatent[l,n])
DisentangleLoss=
DisentangleLoss+PartialUnrelateLoss+
PartialRelatedLoss
}
//Calculating Mi multipliers
if(Iteration>SparsityStartIter and
Iteration<sparsityStopIter)
{
M_Sparity=(Iteration-SparsityStartIter)/
(SparsityStopIter-SparsityStartIter)
}
if(Iteration>=SparsityStopIter) M_Sparity=1
if(Iteration>InterpStartIter and
Iteration<InterpStopIter)
{
M_Interp=(Iteration-InterpStartIter)/
(InterpStopIter-InterpStartIter)
}
if(Iteration>=InterpStopIter) M_Interp=1
if(Iteration>DisentStartIter and
Iteration<DisentStopIter)
{
M_Disent=(Iteration-DisentStartIter)/
(DisentStopIter-DisentStartIter)
}
if(Iteration>=DisentStopIter) M_Disent=1
//Applying Mi to prioritize loss terms
LossTerms=Sort(RecLoss[l],SparsityLoss[l],
InterpolLoss[l],DisentangleLoss[l])
TotalLoss=WeightedSum(Bi*Mi*Ii*LossTerms)
Minimize TotalLoss by the backpropagating
gradient.
\section*{APPENDIX}
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
436
