
Application of Particle Detection Methods to Solve Particle Overlapping
Problems
Wissam AlKendi
1 a
, Paresh Mahapatra
2 b
, Bassam Alkindy
3 c
, Christophe Guyeux
2 d
and Magali Barth
`
es
2 e
1
UTBM, CIAD, F-90010 Belfort, France
2
FEMTO-ST Institute, Univ. Franche-Comt
´
e, CNRS, 15 B Avenue des Montboucons, Besanc¸on, France
3
Department of Computer Science, College of Science, Mustansiriyah University, 10052 Baghdad, Iraq
Keywords:
Particle Detection, Particle Overlap, non-Local Means, Laplacian of Gaussian.
Abstract:
The study of fluid flows concerns many fields (e.g., biology, aeronautics, chemistry). To overcome the prob-
lems of flow disturbances caused by intrusive physical sensors, different methods of flow quantification, based
on optical visualization, are particularly interesting. Among them, PTV (Particle Tracking Velocimetry) which
allows the individualized tracking of tracers/particles, is of growing interest. Different numerical treatments
will enable us to identify and track the particles. However, detection algorithms (e.g., Sobel, Canny, Robert,
Gaussian, morphology) can be sensitive to noise and the phenomenon of overlapping particles in flow. In
this work, we have focused on the detection part with the objective of improving it as much as possible. To
quantify the performance of the different methods tested, synthetic images, with well-defined parameters have
been generated. We compared the performances of the Laplacian of Gaussian (LoG) and the Difference of
Gaussian (DoG) methods, with the traditional method of threshold binarization. In addition, we tested other
techniques based on non-local means (NLM) and overlapping detector to improve the detection of particles in
case of noisy images or overlapping particles. The results show that the LoG gives very good results in most
cases, with additional improvement when using the NLM and the overlap detector.
1 INTRODUCTION
The study of fluid flows concerns different fields, such
as aeronautics, automotive, biology, chemistry, food
processing, geology, etc. The flows coupled, for ex-
ample to chemical reactions, lead to various biologi-
cal and mechanical phenomena, such as the circula-
tion of blood in the human body, the distribution of
oxygen, heat, and pressure of the breathable air in the
lungs, the production of energy in various automotive
engines, and so on. It is therefore very important to be
able to know the velocity and/or the trajectory of the
fluid in order to study the above-mentioned phenom-
ena. Among the different methods of flow quantifi-
cation, optical visualization methods are particularly
a
https://orcid.org/0000-0003-4239-9964
b
https://orcid.org/0000-0001-5367-2124
c
https://orcid.org/0000-0002-0964-1184
d
https://orcid.org/0000-0003-0195-4378
e
https://orcid.org/0000-0001-6519-9995
effective and accurate, especially since they are low
or non-intrusive and therefore have low, to no, impact
on the flow being studied. The optical methods gen-
erally require the flow (the fluid) to be seeded with
tracers, i.e. particles / ”solid” objects, that can be
either artificial (e.g., hollow glass beads), or natural
(e.g. platelets, globules, and cells in biological flu-
ids) (Scharnowski and K
¨
ahler, 2020). Through image
processing, information such as position, size, con-
centration, displacement, velocity vector, etc. can be
obtained. Over the last few decades, various tech-
niques were developed for extracting, for instance,
velocity vector field from the image frames. Among
those methods, one can cite Particle Streak Velocime-
try (PSV), Particle Image Velocimetry (PIV), and Par-
ticle Tracking Velocimetry (PTV). In the last few
years, there has been quite a lot of improvements
in these above-mentioned techniques to analyze the
properties of objects at micro- and nano-scale (Baek
and Lee, 1996; Lima et al., 2012). To be able to in-
dividualize each particle/fluid element and to follow
84
AlKendi, W., Mahapatra, P., Alkindy, B., Guyeux, C. and Barthès, M.
Application of Particle Detection Methods to Solve Particle Overlapping Problems.
DOI: 10.5220/0011852500003497
In Proceedings of the 3rd International Conference on Image Processing and Vision Engineering (IMPROVE 2023), pages 84-91
ISBN: 978-989-758-642-2; ISSN: 2795-4943
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

its trajectory over time, PTV (Particle Tracking Ve-
locimetry) is used (Scharnowski and K
¨
ahler, 2020;
Ohmi and Li, 2000). Usually, a classical PTV al-
gorithm applied on pre-processed images consists of,
first, detecting the positions of each individual par-
ticle and then, matching and tracking these particles
across the image frames (Baek and Lee, 1996; Kim
and Lee, 2002). Over the years, different edge de-
tectors have been used to identify particles. Initially,
the particles were identified using single and dynamic
threshold binarization methods. Going forward, the
two-dimensional Gaussian regression technique was
applied to the particle intensity values to estimate the
sub-pixel particle centroid positions (Ohmi and Li,
2000; Heyman, 2019). However, with the increase in
the complexity in the images, when the intensity and
size of the particles varied, researchers went ahead
to apply different detectors based on noise, gradi-
ent, template, and morphology. These edge detectors
like Sobel, Canny, Robert, Prewitt, Gaussian, Over-
lap, and so on, are generally sensitive to the change
in pixel gray levels (Katiyar and Arun, 2014). Some
of these detectors output different results in terms of
their sensitivity towards noise and in detecting false
edges. Depending on the type of data input, differ-
ent applications of these detectors might work better.
Some will be good for larger and intense particles,
whereas others will have a better chance of catching
smaller and lighter ones (Janke et al., 2020). In or-
der to track particles across image frames acquired
over a time period, most of the algorithms are in-
fluenced by the probability relaxation algorithm tak-
ing into account the similar displacements exhibited
by the nearest neighboring particles (Baek and Lee,
1996; Ohmi and Li, 2000). The particle matching and
tracking were improved by using iterative matching
schemes and Deep Learning networks (Janke et al.,
2020; Heyman, 2019; Lee et al., 2019). However,
with these probabilistic methods, it is very difficult to
track multiple particles due to the occlusion/overlap
of two or more particles (Qian et al., 2021). In this
paper, we seek to improve the detection of particles
for PTV applications. For this purpose, different de-
tection methods are implemented, using Laplacian of
Gaussian (LOG) and Difference of Gaussian (DOG),
and compared to the traditional threshold binarization
method (Lefta et al., 2022). Noise minimization has
also been implemented, and finally, we also seek to
solve as much as possible the problem of overlapping
particles visualized during the detection and tracking
of the latter.
2 METHODOLOGY
In this paper, we have proposed an algorithm to de-
tect featureless micro or nanoparticles in a liquid flow,
where the main objectives are to maximize the num-
ber of detected particles and minimize the problems
related to overlapping. In order to evaluate and de-
termine the accuracy of the algorithms, synthetic im-
ages, of known content, have been created. They al-
low us to vary only one parameter at a time and com-
pare the results obtained at the end of the processing
with the known and imposed parameters used for the
generation of images.
2.1 Synthetic Images: Dataset
Three groups of synthetic two-dimensional (1024 ×
768 px) images have been created, where each group
consists of 40 images including 200 randomly dis-
tributed particles with different properties such as par-
ticle size, particle’s light intensity, and Gaussian noise
rate. Figure 1 shows samples of the synthetic dataset
images for which we varied one or more parameters
(e.g., size dispersion, background noise, illumination
dispersion).
2.1.1 Dataset Creation
In order to test the implementation and robustness of
our algorithm, we need to have images, especially
synthetic images that are modelled on the basis of
real-world experimental ones. These particle image
recordings are based on different characteristics like,
for instance, particle position, diameter, shape, dy-
namic intensity range, spatial density, image depth,
flow patterns, noise in the image, etc. These synthetic
images with well-defined particle locations also help
us in quantifying the quality of our algorithms by pro-
viding measurement error estimation (Ohmi and Li,
2000; Raffel et al., 2018; Mohr et al., 2019).
The synthetic images required to test our detec-
tion algorithm are generated based on the following
steps (Raffel et al., 2018; Thielicke, 2021):
• Size (height × width) and background
(black/white) of the images to be generated.
• Parameters like number N, diameter d
τ
, and flow
pattern of particles along with the type of noises
(e.g., Gaussian, Salt and Pepper, Poisson) to be
added in the images.
• Creation of particles based on their intensity, size
and centroid positions (X
0
,Y
0
,Z
0
) in the first im-
age.
Application of Particle Detection Methods to Solve Particle Overlapping Problems
85

(a) Noise rate = 0%, Z
0
= 0% , d
τ
=
10 px.
(b) Noise rate = 0%, Z
0
= 0 −20% ,
d
τ
= 10 - 20 px.
(c) Noise rate = 0%, Z
0
= 10 −40% ,
d
τ
= 10 - 20 px.
(d) Noise rate = 2%, Z
0
= 0% , d
τ
=
10 px.
(e) Noise rate = 2%, Z
0
= 0 −20% ,
d
τ
= 10 - 20 px.
(f) Noise rate = 2%, Z
0
= 10 −40% ,
d
τ
= 10 - 20 px.
Figure 1: Samples of the synthetic dataset.
• Size and centroid positions of each particle on the
first image are generated using a random number
generator.
• The peak intensity of each particle is based on the
Gaussian intensity profile as a function of particle
depth position (Z
0
), efficiency with which the par-
ticle scatters the incident light (q) and the depth of
view (∆Z). Thus, the peak intensity of each parti-
cle I
0
(Z
0
) is (Raffel et al., 2018):
I
0
(Z
0
) = qexp
−
Z
2
0
(1/8)∆Z
2
(1)
• Next, the intensity profile across an individual
particle’s size boundary (diffusion effect) is cal-
culated by a Gaussian intensity profile, which is
a function of particle peak intensity I
0
(Z
0
), par-
ticle image diameter d
τ
(e
−2
intensity value of
the Gaussian bell containing 95% of the scattered
light), and particle position X, Y (in pixels), given
by (Raffel et al., 2018):
I (X,Y ) = I
0
(Z
0
)e
−
(
X−X
0
)
2
−
(
Y −Y
0
)
2
(1/8)d
2
τ
(2)
• Finally, as per the flow pattern, a trajectory is gen-
erated for each particle in order to have their cor-
responding positions and intensities in subsequent
image frames across a time period.
2.1.2 Dataset Properties
The following properties have been taken into con-
sideration to validate the accuracy of the system in
different scenarios which may occur in the future real
dataset.
• Size: particle size is designed as the diameter in
pixels, where some images contain fixed particle
sizes while others contain a range of sizes. In
this work, we present results for a fixed size of
10px, or for a range of sizes between 10px and
20px within the same image. This choice of parti-
cle size variation range is larger, on purpose than
the classical size variations of hollow glass beads
commonly used as tracers.
• Intensity: it is the intensity of the light directed
towards the particle which varies according to
Equations 1 and 2. To change the intensities, we
varied the value of the particle depth position Z
0
.
In this work, the variation of Z
0
is in a range of 0 -
40, i.e. corresponding to an intensity variation on
the shade of gray between 71 and 255.
• Noise: Gaussian noise has been applied to the
images. Results presented here are either for no
noise or for a variance of 2%.
• Shape: generally, all the particles are circular.
However, some of them may have a polygon
shape due to the high noise rate.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
86
• Displacement: in this example, we have fixed a
linear displacement of 2 pixels between 2 consec-
utive images. Other types of displacement (with
a gradient, with a rotation etc.) as well as other
displacement values have been tested, but are not
presented here.
Table 1 gathers the different parameters tested and
compared in this article, while Figure 1 shows exam-
ples of synthetic images obtained with parameters of
this table.
Table 1: Dataset properties: images of size 1024×768 px
each having 200 particles and a variation in particle inten-
sity, diameter, and noise. Particles are imposed with a linear
displacement of 2 px across subsequent image frames.
Z
0
variation
(%)
d
τ
(px)
Noise
variation
(%)
#
Images
0 %
10
0 10
2 10
10 to 20
0 10
2 10
0 - 20 %
10
0 10
2 10
10 to 20
0 10
2 10
10 - 40 %
10
0 10
2 10
10 to 20
0 10
2 10
2.2 Detection
The detection stage is one of the most important one
since all the upcoming stages depend on the accuracy
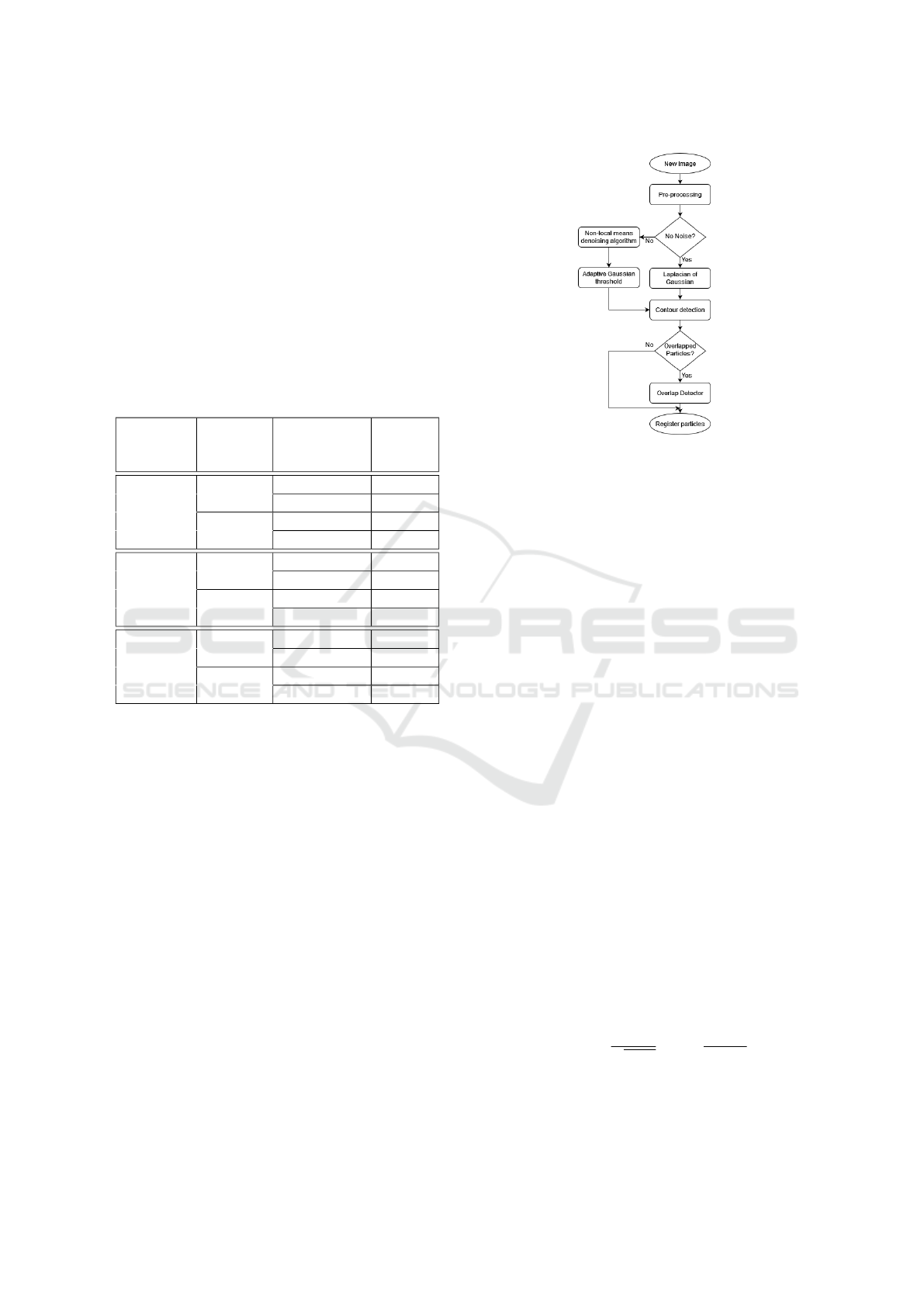
of detecting the particles. Figure 2 illustrates the gen-
eral diagram of the proposed detection stage. Image
binarization, filters, and non-local means denoising
algorithm have been applied to the dataset with auto-
matic configuration determination considering maxi-
mizing the number of detected particles while satisfy-
ing the proposed particle diameter sizes.
2.2.1 Simple Detection Methods
After loading the images as gray-scale ones, some
well-known methodologies have been tested for de-
tecting the particles according to the predetermined
diameter sizes. For instance, image threshold bina-
rization, Difference of Gaussian (DoG), and Lapla-
cian of Gaussian (LoG).
Over the years, the basic and standard method
for individual particle detection has been the Single
Threshold Binary method. The binary method is in
Figure 2: General diagram of the detection stage.
general related to the visual properties of the parti-
cles (Ohmi and Li, 2000). Once the input image has
been pre-processed and converted into a grayscale im-
age (intensity value of each pixel is between 0 and 1),
the user can set a threshold value of intensity which
indicates to ignore all the particles having an inten-
sity above the threshold value. A Gaussian sub-pixel
location estimation method can be used to precisely
estimate the location of the center of each particle
by using a normalized auto-correlation followed by
a Gaussian fitting in order to achieve sub-pixel accu-
racy. The integral coordinates of the centroid loca-
tion (X
0
,Y
0
) can be achieved from the maximum of
the auto-correlation peak (C). The exact coordinates
of each particle (X,Y) with sub-pixel accuracy can be
calculated (Raffel et al., 2018).
Difference of Gaussian (DoG) filter is a two-stage
edge detection process. In the first step, the DoG
performs edge detection by applying a Gaussian blur
(eq. (3)) on the input image for a specified value of
standard deviation (σ
1
). This results in a blurred ver-
sion of the input image. This image is subtracted from
the less blurry input image resulting from the appli-
cation of another Gaussian blur with a more sharper
value of standard deviation (σ
2
). This difference
helps in detecting the pixel values when they cross
zero (i.e. zero crossings) i.e. when negative becomes
positive and vice versa, thus, helping in focusing on
the edges or areas of pixels having some variation
around their neighbors.
G(x,y; σ) =
1
√
2πσ
2
exp
−
x
2
+ y
2
2σ
2
(3)
The LoG is an edge detection algorithm to locate
boundaries and extract features by identifying pixel
intensity variance within the image. Generally, it is
Application of Particle Detection Methods to Solve Particle Overlapping Problems
87
derivative from the Gaussian filter for noise removal
by smoothing the image and Laplacian operator. The
Laplacian operator helps in highlighting the regions/
areas of rapid intensity change in the image, i.e. when
the pixel values go from negative to positive or vice
versa (i.e.zero-crossings), therefore, is a very com-
mon method used for edge detection. Equation 4,
based on Marr and Hidreth work (Marr and Hildreth,
1980) shows the mathematical representation of the
2D LoG function, centered on zero:
LoG(x,y) = −
1
πσ
4
1 −
x
2
+ y
2
2σ
2
e
−
x
2
+y
2
2σ
2
(4)
It is worth mentioning that this method has been
used to detect particles within clear images. In other
words, images with no noise, and due to the presence
of different noise ratios in the rest of the images, more
advanced algorithms have been chosen to handle the
noise elimination process as explained in the next sec-
tion.
2.2.2 Non-Local Means Algorithm
With the different noise rates within the dataset, the
demand for a more efficient algorithm is required to
increase image quality without affecting the edges of
the particles, hence improving the accuracy of the par-
ticle detection process.
Non-local means (NLM) is an image processing
algorithm for image denoising. it is a more advanced
technique for removing Gaussian noise from scien-
tific images that arise from electronic components
(e.g., microscope and MRI) which affects the pro-
cess of extracting information from these images. The
NLM algorithm searches the image space to calculate
the mean within non-local regions. In other words,
it is not calculating the mean based on a local group
of similar pixels (e.g., 4x4 or 9x9) as proposed by
other researchers within the same field (Buades et al.,
2005). Instead, it is assigning the center weight CW
(the weight of the pixel to be denoised) according to
region similarity from all over the image, regardless
of their locations.
Finally, contour detection has been used to detect
the boundary of the particles and extract information
about their shape, which aims to identify the particle
center and diameter to be registered within the sys-
tem.
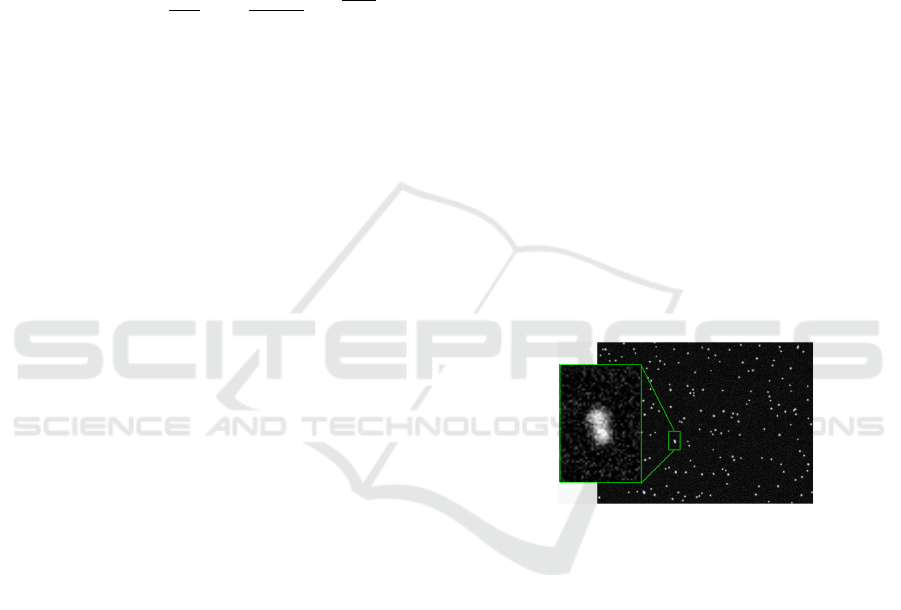
2.2.3 Overlapped Particles Detection
Since the particles are distributed randomly on im-
ages, this may occurring overlapping particles in
some areas. Figure 3 shows overlapped particles ex-
ample. To detect these overlapped particles, we used
template matching which is a high-level machine vi-
sion technique for determining the similarities of the
template image matrix within the source image ma-
trix (Brunelli, 2009). Prior to the use of the Template
Matching technique, we carried out two main prepro-
cessing steps. Firstly, automatically extract a good
shape template from the same source image depend-
ing on a predefined particle diameter size, or by calcu-
lating all particle diameter sizes within the image and
selecting the diameter size that occurs mostly. Sec-
ondly, extracting the particles’ overlapped segments
and estimating the number of the particles depending
on the detected segment diameter and the extracted
template diameter size. The following formula shows
the process of estimating the number of overlapped
particles within the segment.
z = x ÷y (5)
No. of particles =
2 if z ≤ 2
⌈
z
⌋
otherwise.
(6)
where x is the diameter size of the extracted segment
and y is the diameter size of the template.
Figure 3: Overlapped particles example.
3 DETECTION RESULTS
The algorithm has been programmed in Python, a
general-purpose programming language, which has
several powerful modules in this research field, which
will aid in the enhancement of the simplicity and scal-
ability in future research.
3.1 Detection
Several experiments and comparisons have been car-
ried out to determine the most beneficial methods for
handling the process of detecting the maximum num-
ber of particles in respect of practicability, efficiency,
and execution time. In the first part, we compare three
detection methods. In the second part, we improve the
results by treating the noise in the images. Finally, in
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
88
the third part, we refine the detection thanks to an al-
gorithm allowing to minimize the problems related to
the overlapping of the particles on the same image.
3.1.1 DoG, LoG, and Binarization
As illustrated in Section 2, three techniques: DoG,
LoG, and image binarization have been taken into
consideration in the process of experimenting with the
dataset from table 1.
In addition, automatic configurations determina-
tion has been developed to find the optimal configu-
ration in the range of 0-255 configurations that aim in
reaching the objectives. Table 2 gathers the results ob-
tained by processing the synthetic images with the 3
detection methods. We can see that the LOG method
gives the best results in the vast majority of cases.
However, the quality of the results decreases when
images are noisy. In order to minimize the noise and
to improve the detection, we used an algorithm, pre-
sented in the next section.
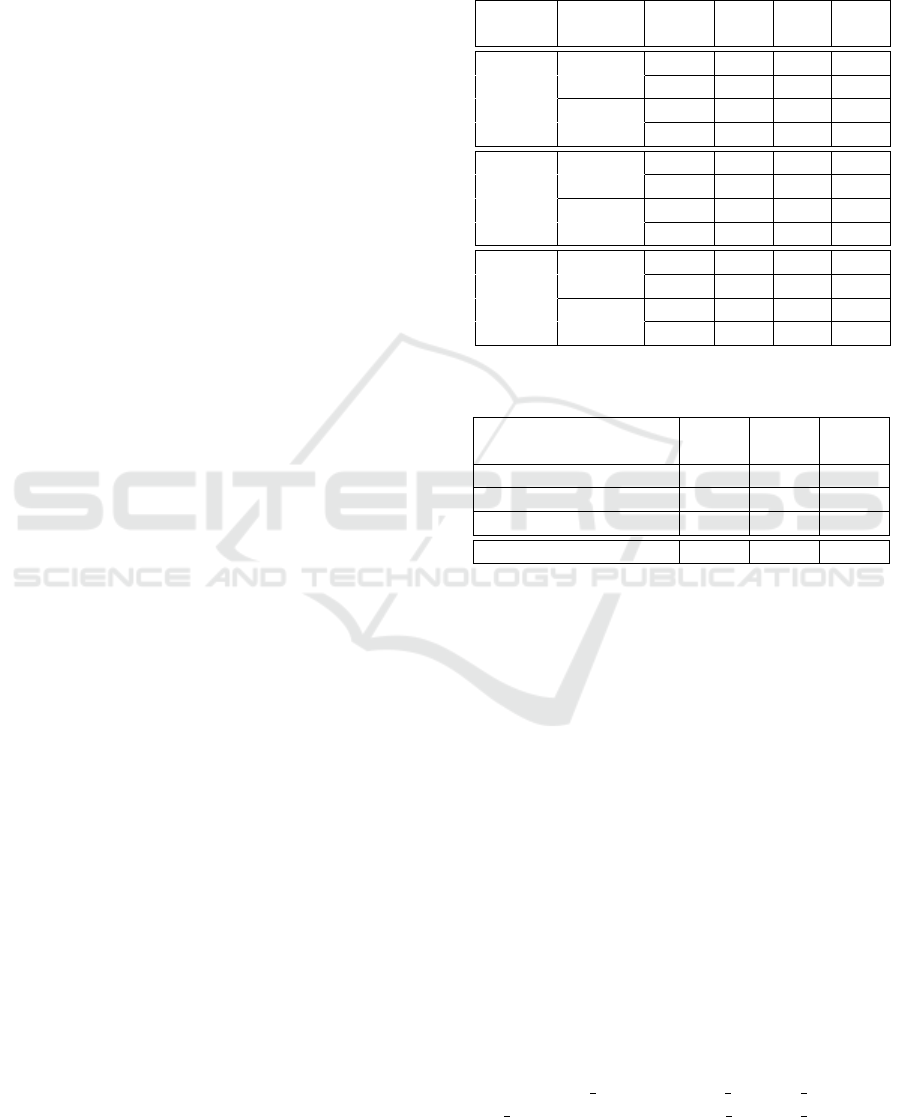
In addition, Figure 4 shows an example of the per-
formance comparison sample of the mentioned meth-
ods configurations on one of the test case images (Fig-
ure 4(a)) from table 2 (Z
0
= 10 −40, D = 10 - 20 px,
Noise = 2 %).As can be seen from Figure 4(e), Lapla-
cian of Gaussian (LoG) method was able to detect
more number of particles (N
p
: 176/200) as compared
to DoG method (Figure 4(b),(c)) . Although the clas-
sical Binary threshold method detects a huge number
of particles, it is clear from Figure 4(d), that in case of
a noisy image, the Binary method also detects noise as
particles. In this case, we note that another concern of
detection is related to the phenomenon of overlapping
of particles, particularly visible here when the value
of diameter detected is higher than the maximum di-
ameter generated on our synthetic images. This can
also be seen for example on Figure 5.
3.1.2 Non-Local Means Algorithm
To minimize the effect of noise on the particle detec-
tion part, non-Local Means Algorithm for gray im-
ages has been used in the proposed method with some
aiding approaches, for instance, Gaussian blur and
adaptive Gaussian thresholding, with variance algo-
rithm settings that fit dataset variations in terms of the
following algorithm configurations: h-parameter de-
ciding filter strength. A higher h value leads to better
noise removal but also removes particle edges. Tem-
plate Window size and Search Window size: should
be an odd value.
Tables 3 show different settings used in the noise
removal process when the noise variance is 2%.
It is worth mentioning that the detected number
Table 2: Comparison of the detection results obtained from
the synthetic images of table 1. Results in the last three
columns Bin. DoG and LoG are given as percentages of
detected particles using respectively classical binarization,
DoG and LoG method.
Z
0
(%) d
τ
(px)
Noise
(%)
Bin.
(%)
DoG
(%)
LoG
(%)
0
10
0 67.5 95 98
2 125 77.5 96
10 to 20
0 71 91 99.5
2 97.5 90 94
0 to 20
10
0 70 96.5 98
2 60 96.5 93
10 to 20
0 24 88 97.5
2 60 85 96.5
10 to 40
10
0 64 70.5 78.5
2 87.5 77 80.5
10 to 20
0 40.5 72.5 82
2 97.5 80 88
Table 3: Parameters values and results of using NLM on 2%
Gaussian noise image.
Parameters
Setting
1
Setting
2
Setting
3
h 15 35 45
Template Window size 7 7 7
Search Window size 21 51 71
Result (%) 243.5 94.5 93.5
of particles represents the total number when using
the system without the overlap detection tool. Hence,
some overlapped particles are detected and counted
as a single particle. Moreover, the satisfaction of the
predetermined particle diameter sizes have been taken
into consideration as a constraint when conducting the
experiments.
Experimental results show the efficiency of the al-
gorithm which improves the denoising performance
and enhances image quality without affecting parti-
cle edges. Hence, increasing the detection accuracy
within the noisy dataset. Figure 6 shows the perfor-
mance of the NLM algorithm.
3.1.3 Overlap Detector Tool
Experiments have been carried out with the usage
of the overlap detector tool to maximize the de-
tected number of particles and enhance the overall
performance of the system. Open-Source Computer
Vision Library (OpenCV) provides different Single
template matching comparison methods, for in-
stance, TM SQDIFF, TM SQDIFF NORMED,
TM CCORR, TM CCORR NORMED,
Application of Particle Detection Methods to Solve Particle Overlapping Problems
89
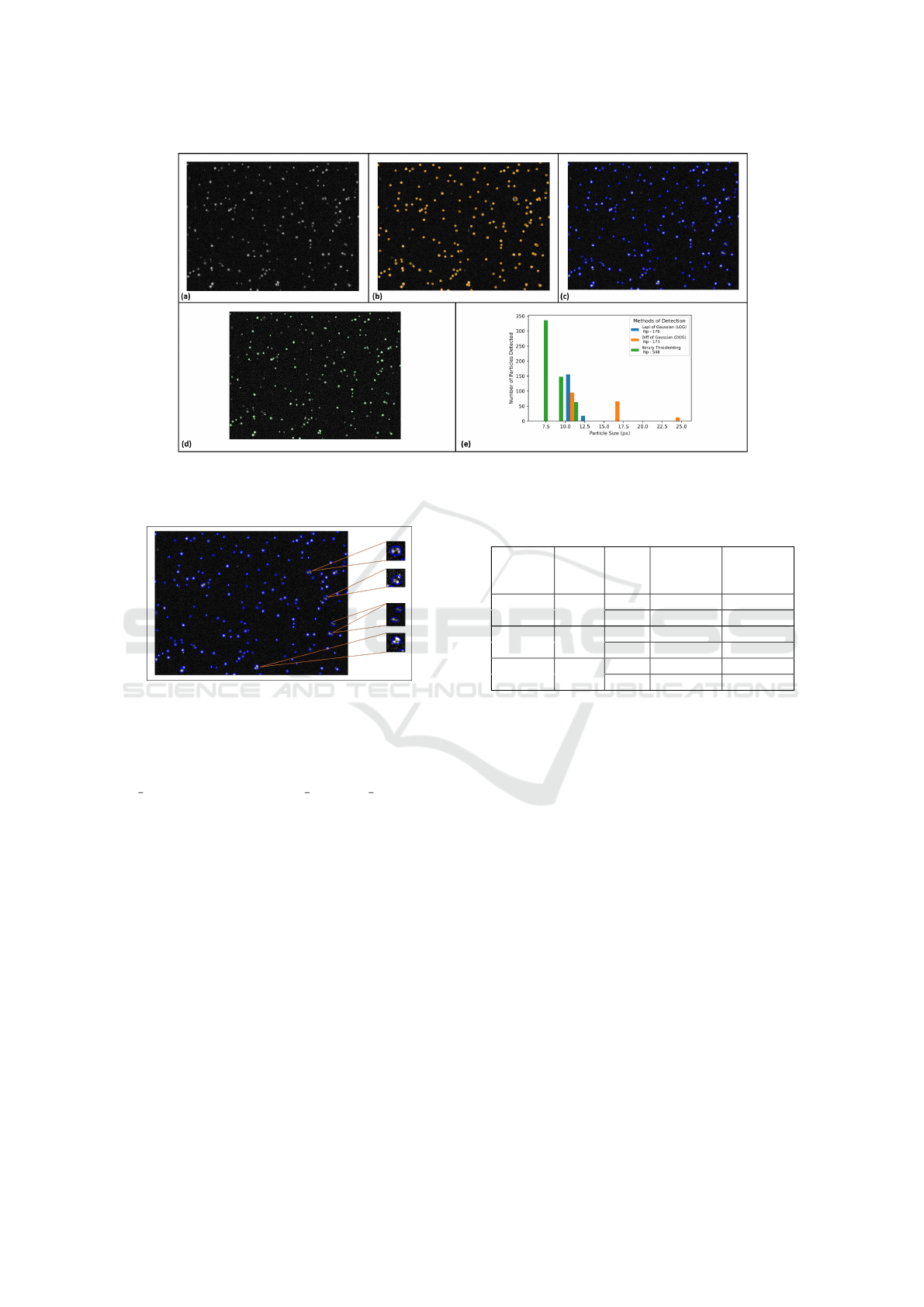
Figure 4: Performance comparison sample of DoG, LoG, and image binarization methods applied on a synthetic image with
200 particles (N), with a Diameter (d
τ
) and variation of particle depth position ∆Z
0
. intensity variation of 10px ±100% and
10 −40%, respectively.
Figure 5: Occurrence of particle overlapping leading to de-
tection of particle with diameter higher than the maximum
diameter. Smaller images on the right highlights detach-
ment circles that includes one or more particles overlapped
with each other detected as one single particle.
TM CCOEFF, and TM CCOEFF NORMED.
These methods have been experimented with to
decide the most applicable method in our situation.
Additionally, the function minMaxLoc has been used
to find the minimum and maximum result values
with their locations to extract the particles that fit the
template from the overlapped region and achieve the
objectives.
Table 4 shows the number of particles detected
when using the overlap detector tool. Final experi-
ments outcomes showed highly beneficial detection
rates achieved 99% within most of the datasets that
has no variation in the particle diameter size. How-
ever, some of the overlapped particles could not be
detected because of their coordinates lying on the bor-
ders within the images. Figure 7 shows a result exam-
ple of using the overlap detector tool and statistics.
Table 4: The result of using overlap detector tool.
∆Z
0
(%)
d
τ
(px)
Noise
(%)
Without
Overlap
tool (%)
With
Overlap
tool (%)
0 10
0 89 99
2 85 95
0 to 20 10
0 93 99
2 92.5 98.5
10 to 40 10
0 87 99.5
2 76 91
4 CONCLUSIONS
There can be no doubt that detecting the microscopic
featureless particles in liquids with various proper-
ties is challenging. Although different research con-
texts in this field, it was found that using Laplacian
of Gaussian and non-local means algorithms with au-
tomatic configuration determination is highly benefi-
cial in the detection stage and aims the precise de-
termination of the particle center and diameter. Fur-
thermore, the overlap detector tool enhanced the out-
comes and showed a highly beneficial estimation rate
yields maximizing the detected number of particles
for the current research synthetic dataset. However,
further research must be conducted to enhance the de-
tection rates of different noise ratio datasets, includ-
ing the usage of a multi-template matching technique
to handle the analysis process of different particle di-
ameter sizes within the same image.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
90

(a) Noise rate= 0%. (b) Noise rate= 2%. (c) NLM algorithm performance.
Figure 6: The performance of the NLM algorithm.
(a) When using overlap detector tool:
detection accuracy of 99%.
(b) Without using overlap detector
tool : detection accuracy of 89%.
(c) The statistics of using the overlap
detector tool.
Figure 7: The performance of the overlap detector tool.
REFERENCES
Baek, S. J. and Lee, S. J. (1996). A new two-frame particle
tracking algorithm using match probability. Experi-
ments in Fluids, 22(1):23–32.
Brunelli, R. (2009). Template matching techniques in com-
puter vision: theory and practice. John Wiley & Sons.
Buades, A., Coll, B., and Morel, J.-M. (2005). A non-local
algorithm for image denoising. In 2005 IEEE Com-
puter Society Conference on Computer Vision and
Pattern Recognition (CVPR’05), volume 2, pages 60–
65 vol. 2.
Heyman, J. (2019). TracTrac: A fast multi-object tracking
algorithm for motion estimation. Computers & Geo-
sciences, 128:11–18.
Janke, T., Schwarze, R., and Bauer, K. (2020). Part2track:
A matlab package for double frame and time resolved
particle tracking velocimetry. SoftwareX, 11:100413.
Katiyar, S. K. and Arun, P. V. (2014). Comparative analysis
of common edge detection techniques in context of
object extraction.
Kim, H.-B. and Lee, S.-J. (2002). Performance improve-
ment of two-frame particle tracking velocimetry using
a hybrid adaptive scheme. Measurement Science and
Technology, 13(4):573–582.
Lee, S., Yoon, G., and Go, T. (2019). Deep learning-based
accurate and rapid tracking of 3d positional informa-
tion of microparticles using digital holographic mi-
croscopy. Experiments in Fluids, 60.
Lefta, A. S., Daway, H. G., and Jouda, J. (2022). Red
blood cells detecting depending on binary conversion
at multi threshold values. Al-Mustansiriyah Journal
of Science, 33(1):69–76.
Lima, R., Ishikawa, T., Imai, Y., and Yamaguchi, T. (2012).
Confocal micro-piv/ptv measurements of the blood
flow in micro-channels. Micro and Nano Flow Sys-
tems for Bioanalysis, page 131–151.
Marr, D. and Hildreth, E. (1980). Theory of edge detection.
The Royal Society of London. Series B. Biological Sci-
ences, 207(1167):187–217.
Mohr, D. P., Knapek, C. A., Huber, P., and Zaehringer, E.
(2019). Algorithms for particle detection in complex
plasmas. Journal of Imaging, 5(2).
Ohmi, K. and Li, H.-Y. (2000). Particle-tracking velocime-
try with new algorithms. Measurement Science and
Technology, 11(6):603–616.
Qian, Y., Ji, R., Duan, Y., and Yang, R. (2021). Multiple
object tracking for occluded particles. IEEE Access,
9:1524–1532.
Raffel, M., Willert, C., Scarano, F., K
¨
ahler, C., Wereley, S.,
and Kompenhans, J. (2018). Particle Image Velocime-
try A Practical Guide. Springer.
Scharnowski, S. and K
¨
ahler, C. J. (2020). Particle im-
age velocimetry - classical operating rules from to-
day’s perspective. Optics and Lasers in Engineering,
135:106185.
Thielicke, W. (2021). Digital particle image velocimetry
tool for matlab.
Application of Particle Detection Methods to Solve Particle Overlapping Problems
91
