
Hard Spatial Attention Framework for Driver Action Recognition at
Nighttime
Karam Abdullah
1,2 a
, Imen Jegham
3,4 b
, Mohamed Ali Mahjoub
3c
and Anouar Ben Khalifa
3,5 d
1
Université de Sousse, ISITCom, LATIS-Laboratory of Advanced Technology and Intelligent Systems,
4011, Sousse, Tunisia
2
University of Mosul, Collage of Education for Pure Science, Computer Science Department, Mosul, Iraq
3
Université de Sousse, Ecole Nationale d’Ingénieurs de Sousse, LATIS- Laboratory of Advanced Technology and
Intelligent Systems, 4023, Sousse, Tunisia
4
Horizon School of Digital Technologies, 4023, Sousse, Tunisia
5
Université de Jendouba, Institut National des Technologies et des Sciences du Kef, 7100, Le Kef, Tunisia
Keywords: Driver Action Recognition, Driving at Nighttime, Deep Learning, Hard Attention, Spatial Attention.
Abstract: Driver monitoring has become a key challenge in both computer vision and intelligent transportation system
research fields due to its high potential to save pedestrians, drivers, and passengers' lives. In fact, a variety of
issues related to driver action classification in real-world driving settings are present and make classification
a challenging task. Recently, driver in-vehicle action relying on deep neural networks has made significant
progress. Though promising classification results have been achieved in the daytime, the performance in the
nighttime remains far from satisfactory. In addition, deep learning techniques treat the whole input data with
the same importance which is confusing. In this work, a nighttime driver action classification network called
hard spatial attention is proposed. Our approach effectively captures the relevant dynamic spatial information
of the cluttered driving scenes under low illumination for an efficient driver action classification. Experiments
are performed on the unique public realistic driver action dataset recorded at nighttime 3MDAD dataset. Our
approach outperforms state-of-the-art methods' classification accuracies on both side and front views.
1 INTRODUCTION
The World Health Organization (WHO) estimates
that over 1.3 million people lose their lives in road
accidents yearly, and between 20 and 50 million
people are injured as a result (WHO,2022). The main
goal of safe system approaches to traffic safety is to
make sure that the transportation system is safe for
everyone who uses the roads; to make the safety
systems more efficient in preserving the lives of
drivers, passengers, and pedestrians, one of the
important things is analysing the actions of drivers in
realistic driving scenarios.
The main goal of Driver Actions Recognition
(DAR) is to categorize the driver's normal actions and
the various abnormal actions of the driver. There have
a
https://orcid.org/0000-0003-2517-873X
b
https://orcid.org/0000-0003-1531-438X
c
https://orcid.org/0000-0002-8181-4684
d
https://orcid.org/0000-0002-9946-0829
been many state-of-art studies in this field, where
some of them have worked on images (Hu, 2019)
(Koesdwiady, 2016) (Xing, 2019), and others treated
the video (Hu, 2018). Distracted driving coupled with
low illumination increase the accident probability,
whereas, according to a survey conducted by the
National Sleep Foundation (NSF), 60% of
respondents have admitted they drive when fatigued,
and 37% have admitted they doze off behind the
wheel. 13% of those people claim that they nod off
behind the wheel at least once a month, and 4% report
that they have been responsible for an accident
because of dozing off behind the wheel (NSC, 2022).
The problem of being distracted when driving at
nighttime is the primary subject of this research.
Taking care of these issues will make it easier to
964
Abdullah, K., Jegham, I., Mahjoub, M. and Ben Khalifa, A.
Hard Spatial Attention Framework for Driver Action Recognition at Nighttime.
DOI: 10.5220/0011846100003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 964-971
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

implement various applications, such as automatic
driving at nighttime, safety driving systems in cars,
and robotics in the near future.
Attention is a human cognitive process that is
capable of promoting a selection of a few motives
from a huge amount of information that reaches us
constantly (da Silva Simões, 2016). Attention can be
thought of as an essential component of both
perceptual and cognitive processes. In light of the fact
that our capacity to process information from multiple
sources is limited, attention mechanisms select,
modulate, and concentrate on the data that are most
pertinent to behaviour (Correia, 2021). Attentional
mechanisms consider making networks more
powerful and simpler, reduce information bottlenecks
caused by long spatial and temporal dependencies,
and facilitate multimodality [10]. Thus, we can give a
comprehensive definition of attention as a process of
preferring a specific part of the data over other parts
and whether they are image data.
Attention mechanisms can be broadly classified
as belonging to one of the following groups: hard
attention which determines whether part of the input
will appear in the output or not, soft attention which
determines whether a portion of the input appears in
re-weighted form in the output, self- attention which
is a technique that allows the input parts to interact
with each other and determine which ones will be of
the highest interest in the output by measuring the
interconnection between the parts. There are also
secondary categories as: global attention which is an
approach that takes the traditional soft attention and
makes it easier to implement within encoder-decoder
frameworks, local attention which is a balance
between soft attention and hard attention, co-attention
which shifts the focus both from the context to the
target and back to the context from the target, and
hierarchical attention which provides mechanisms
that have been adapted to engage with hierarchical
levels at various levels of granularity (Santana, 2021).
Visual attention can be clustered into two main
categorized types of attention: spatial attention that
focus on where concentration should be, and temporal
attention which determines when paying attention
should be (Guo, 2022). To improve overall
performance, there is a hybrid method called spatial-
temporal attention which was also proposed in (Du,
2017).
In this paper, we put forward a novel hard spatial
attention mechanism to explain the behaviours of
nighttime driving. This mechanism is based on the
ability of humans to interpret visual sequences with
high efficiency by focusing their attention exclusively
on the most significant driver action information. We
develop a mechanism that uses image processing
techniques to separate the driver's human body from
the rest of the in-vehicle environment at nighttime.
This is accomplished by creating a mask through
which the driver's movements are extracted. This
enables the model to focus on the most prominent
parts of the driver's human body feature maps for
spatial attention in the system. On the other hand, we
use a hybrid network for classification and for getting
the final decision.
Our main contributions can be listed as follows:
• We design a novel hard spatial attention model
that captures the dynamic spatial dependency by
focusing attention on related information present on
infrared images.
• We develop a mechanism to separate the driver's
body from the background by a piece-wise linear
transformation function and morphological processes
and the foreground shape dropped onto the original
infrared image to obtain unique objects
independently, without losing any pertinent
information or any smallest visual details.
• Experiments on 3MDAD at nighttime
benchmark datasets prove that the suggested method
is efficient compared with state-of-the-art
approaches.
2 RELATED WORKS
Several research are currently conducted on deep
learning to recognize driver action systems (Jegham,
2020) (Hu, 2020) (Abdullah, 2022) (Hu, 2021). This
is because deep learning can extract a large number
of features quickly, with high accuracy, and in record
time, compared to traditional methods (Kong, 2022)
(Wang, 2019).There are many algorithms that use
deep learning techniques by merging the depth shape
with RGB visuals. Jegham et al. (Jegham, 2020)
proposed a driver action detection system using a soft
spatial attention network that was based on depth
information. They suggested a depth-based spatial
attention network to direct attention on person
silhouettes, which would allow it to accurately
identify the movements of the driver. Alotaibi et al.
(Alotaibi, 2020), offered a strategy that improved the
performance of detecting a distracted driver's
behaviour by combining three of the most
sophisticated models in deep learning. These models
included the residual network, the inception module
and the hierarchical recurrent neural network. In
(Tran, 2018) Tran et al. proposed a system for the
detection of distractions based on various deep
learning architectures. They gathered a dataset that
Hard Spatial Attention Framework for Driver Action Recognition at Nighttime
965
included images of drivers in both their typical
driving postures and in postures indicating that they
were preoccupied. An embedded graphics processing
unit platform was used to develop and test four deep
convolutional neural networks, including VGG-16,
AlexNet, GoogleNet, and the residual network.
Kopuklu et al. (Kopuklu, 2021) suggested a
contrastive learning strategy for acquiring a measure
to distinguish between typical and unusual driving by
using deep learning techniques. They employed
ResNet-18 as the base encoder to determine the
baseline results based on spatial attention. Previous
work mainly dealt with driving distraction during
daytime. This was due to the difficulty of obtaining a
nighttime database. It was also difficult to interpret
the very dark nighttime images because of lack of
lighting and the type of noise that accompanied the
nighttime image. Abdullah et al. (Abdullah, 2022)
was the first to work on DAR at nighttime. They
proposed multi-convolutional streams for a hybrid
network that would effectively fuse multimodal data
to efficiently categories drivers' activities in low
visibility and a crowded driving scenario. We propose
a novel hard spatial attention framework to separate
the driver’s body from the surrounding environment
at nighttime by creating a mask through which the
driver’s actions are extracted. Then a hybrid network
is used for classification and to getting the final
decision.
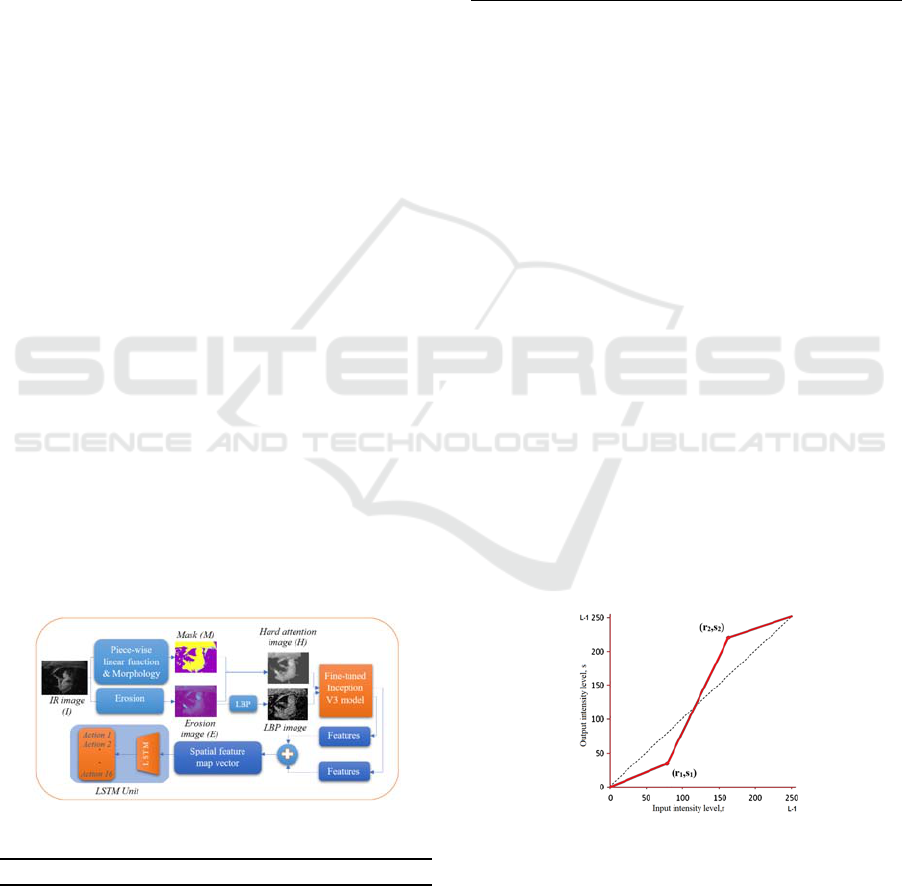
3 PROPOSED APPROACH
In this work, we develop a novel Hard Spatial
Attention (HSA) architecture, which can recognize
driver activities during the nighttime inside a vehicle.
This framework is shown in Figure 1 and Algorithm 1.
Figure 1: Proposed architecture of HSA.
Algorithm 1: Hard Spatial Attention Framework.
Require: IR test sequence: {I
i
, r
1
, s
1
, r
2
, s
2
}
Ensure: Classification result label: y
1:for i ←0…..t do
2: C
←
Piecewise_liner_transformation (I
,𝑟
,𝑠
,𝑟
,𝑠
);
3: M
← Morphological_operation(Dilation&Closing) (C
);
4: E
← Morphological_operation(Erosion) (r
);
5: H
← M
× E
;
6: L
← LBP (E
);
7: Features_L
← CNN (L
);
8: Features_H
← CNN (H
);
9: Spatial_Features_Map
← (Features_L
+ Features_H
);
10: end for
11: y
← LSTM_Classification (Spatial_Features_Map);
12: return y
3.1 Hard Spatial Attention
Each image is driven through two series of image
processors to produce a hard-attention image and a
Local Binary Pattern (LBP)-image simultaneously.
The two results of images pass through the fine-tuned
Inception V3 model. The main idea behind the hard
attention image is to create a mask and then drop it on
the original image to focus on a most informative
specific region, which is a main step in the spatial
attention mechanism.
The mask is obtained by two steps: the first step is
the center of interest because we work at nighttime,
so the images suffer from low illumination, which
causes low contrast images. Therefore, to get contrast
stretching we use the piece-wise linear transformation
function, which is not completely linear in its
behaviour. On the other hand, although it is linear
between specific intervals, contrast stretching is one
of the most often utilized transformation functions. It
effectively lowers the intensity of dark pixels while
raising it for the light pixels, resulting in a stretching
of the intensity levels. This step is illustrated by
Figure 2 (GeeksforGeeks, 2019)(Gonzalez RC,
2017), where (r1, s1) and (r2, s2) are the two points.
Figure 2: Piece-wise linear transformation function
(Gonzalez RC, 2017).
This function makes the intensity values of the
dark portion darker and the light portion lighter. It
expands the range of the intensity in the image.
Summing the number of segment lengths of discrete
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
966
linear functions can be expressed by Equation (1)
(Gonzalez RC, 2017).
𝑌=
1+
Δ𝑟
Δ𝑠
Δ𝑠
(1)
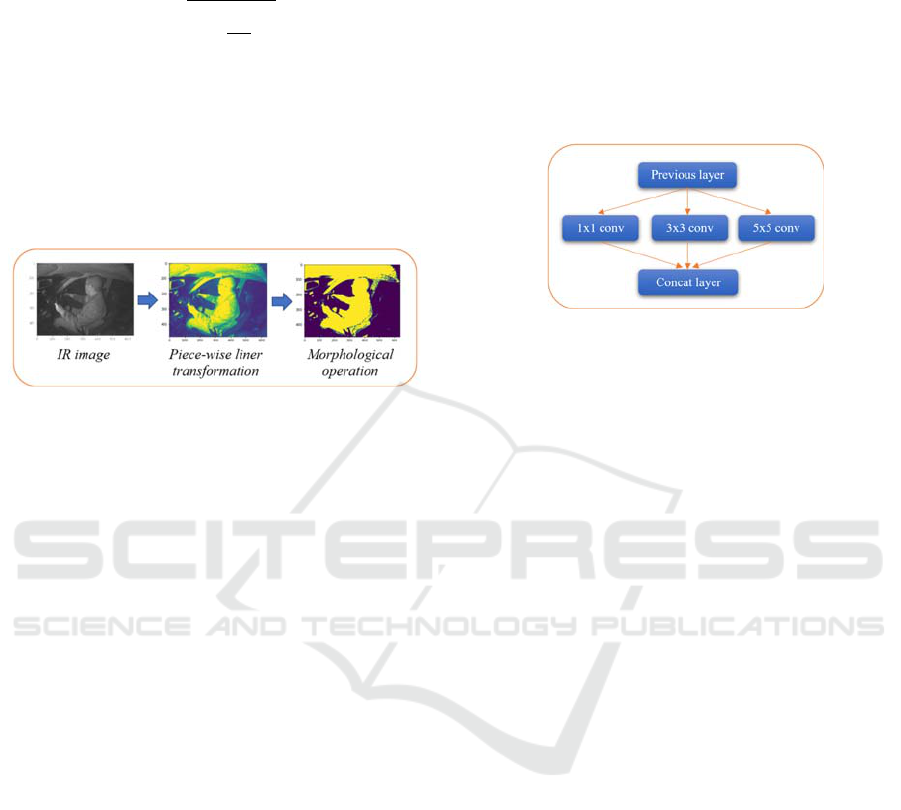
The second step is done by using the
morphological operation by applying dilation to
expand the image pixels and fill the hole in the image.
then a close operation to remove or close smallest
objects. Figure 3 illustrates the steps of creating a
mask.
Figure 3: Example of creating mask steps.
After creating the mask, we drop it on the erosion
image to get a hard attention image. Thereby, H
i
can
be expressed by applying Equation (2), where M
i
is
the mask image and E
i
is erosion image.
𝐻
=𝑀
×𝐸
(2)
3.2 Feature Extraction & Classification
LBP-images are obtained from the descriptor (LBP)
to get hand craft features that will add more visual
features to the recognition system. LBP is a form of a
visual descriptor used in computer vision to classify
objects. It can effectively summarize the local
information of images, by labelling the pixels of an
image with thresholding the pixels in the vicinity of
each pixel and treating the result as a binary number
(Huang,2011).
All images obtained from the hard attention and
the LBP descriptor are simultaneously entered into a
pre-trained Inception V3 network to extract 2048
features per frame from the hard attention line and
2048 features per frame from the LBP descriptor, and
then combine them together to produce a spatial
feature map vector, giving a clear understanding of
the image content, Thus, it clearly describes the
driver's actions inside the car cabin while driving at
nighttime. It is known that most safety systems and
modern human-action monitoring systems depend on
deep learning in interpreting events and actions
because of their high accuracy. One of the best
algorithms used in deep learning is the Inception V3
algorithm, which consists of 48 convolutional layers.
It is based on the principle of the inception layer, with
the basic concept of a sparse connected architecture.
The inception layer contains (1×1), (3×3) and (5×5)
convolution layers and group together their result
filter banks into a unique output vector that becomes
the feed of the following stage (Szegedy, 2016), as
shown in Figure 4.
Figure 4: The sparsely connected layer of general inception
architecture (Szegedy, 2016).
The presence of different sizes of filters in a
particular layer trained within a model helps to find
different sized parts within the image. For example,
the parts of the image of the driver’s actions inside the
cockpit have different sizes. The next network layer
will be trained on the overall object in an image,
which allows the internal layers to select the right
filter size to pick up the suitable information in the
image. It is possible that the size of the human head
in the first image is large, so we must use a large filter,
while in the second image it is small, so we will use a
smaller filter.
Figure 5 illustrates the inception module
architecture that uses dimensionality reduction by 1×1
convolution processes to reduce the cost of computing
before more expensive 3×3 and 5×5 convolutions
(Szegedy, 2015). It is possible to construct an
Inception V3 network by stacking together the
modules that are similar to the ones illustrated above,
with the addition of some max pooling layers with
stride “2” to reduce the resolution of the grid by half.
This architecture has the advantage of allowing for
considerable increment in the number of units for each
step without causing an uncontrolled explosion in
computational costs at later levels, which is an
important feature. This is achieved by the ubiquitous
use of dimensionality reduction prior to expensive
convolutions with larger patch sizes.
The loss function in Equation (3) is utilized in
multi-class classification endeavors, known as a
categorical cross entropy. Calculating the loss of an
example is done via the categorical cross entropy loss
function, which does so by computing the following
expression (Knowledge Center, 2022).
Hard Spatial Attention Framework for Driver Action Recognition at Nighttime
967

Figure 5: Inception module dimension reduction (Szegedy,
2015).
𝐿𝑜𝑠𝑠=−𝑦
.log ŷ
(3)
where s is the number of scalar values that are
generated by the model, ŷ
is the scalar value in the
model output and 𝑦
is the value that corresponds to
the target. Because of the minus sign, the loss will be
reduced when the distributions are brought into closer
proximity with one another.
The Long-Short Time Memory (LSTM)
(Hochreiter, 1997) network and Gated Recurrent
Units (GRU) (Chung, 2014) are a special type of
Recurrent Neural Networks (RNN). They are a robust
and effective sort of neural networks, and they are
among the most interesting algorithms now in use due
to the fact that they are the only ones that have an
internal storage. Both models have a forget gate, but
the GRU lacks an output gate, so it has fewer
parameters. It is used for certain tasks, and it performs
better on small datasets and less frequent data
(Gruber, 2020). LSTM can learn long-range
information and has been very successful and has
been widely used. LSTM is relied upon to conduct the
process of classifying the driver action, due to the fact
that past events are used to infer subsequent events.
This network includes the time factor, which is very
necessary to understand the actions during a certain
period of time. The network consists of four gates,
which are dependent on the network in their
operation, and which assist the network in
remembering the most critical information, resulting
in a significant improvement in the output quality.
The LSTM formula can be expressed by Equations
(4-9) (Ullah, 2017), where I is the input gate, W is the
weight matrices, L is the incoming vector, b is the bias
vector, F is the forgetting gate, O is the output gate, g
is input node, C is the cell state, H is the short term
memory and ⊛ is dot product operation.
𝐼
= 𝜎𝑊
𝐻
,𝐿
+ 𝑏
(4)
𝐹
= 𝜎𝑊
𝐻
,𝐿
+ 𝑏
(5)
𝑂
= 𝜎
(
𝑊
𝐻
,𝐿
+ 𝑏
)
(6)
𝑔
=𝑡𝑎𝑛ℎ(𝑊
𝐻
+ 𝐿
+ 𝑏
)
(7)
𝐶
=𝐶
⊛𝐹
+𝑔
⊛𝐼
(8)
𝐻
=tanh(𝐶
)⊛𝑂
(9)
For driver action recognition tasks, the performance
metric is the classification accuracy as in the Equation
(10):
𝑨𝒄𝒄𝒖𝒓𝒂𝒄𝒚=
𝐓𝐏 + 𝐓𝐍
𝐓𝐨𝐭𝐚𝐥 𝐩𝐫𝐞𝐝𝐢𝐜𝐭𝐢𝐨𝐧𝐬
(10)
where TP are true positives, TN is true negatives and
total number of predictions is the total number of
predictions made by the model (TP + TN + False
Positives + False Negatives).
4 EXPERIMENTS AND RESULTS
To highlight the utility of our proposed HSA, we
evaluate our approach on different views of realistic
sequences collected at nighttime.
4.1 Dataset
The new distraction dataset called the Multiview,
Multimodal, and Multispectral Driver Action Dataset
3MDAD (at nighttime) (Jegham, 2020) is used for the
evaluation of HSA performance. To the best of our
knowledge, this dataset is the first real-world dataset
gathered from environments at nighttime in addition
to daytime. The data are recorded from the side and
front views at nighttime. It displays 19 drivers who
are given instructions to carry out 16 actions. The first
action is: “safe driving”, and 15 other distracting
secondary actions are: “doing hair and makeup”,
“adjusting radio”, “GPS operating”, “writing a
message using the right hand”, “writing a message
using left hand”, “talking phone using right hand”,
“talking phone using left hand”, “having picture”,
“talking to the passenger”, “singing or dancing”,
“fatigue and somnolence”, “drinking using right
hand”, “drinking using left hand”, “reaching behind”
and “smoking”. These actions are respectively
referred to as A1- A16. A total of 130,028 frames are
included in this dataset.
4.2 Experimental Setup
The experiments are performed using an ASUS
laptop model TUF F15 equipped with a core i7-
11370H Intel processor, 40 GB of DDR4 RAM, and
a clock speed of 3200 MHz. Windows 10 serves as a
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
968
primary operating system. We rely on libraries such
as TensorFlow 2.6.0 and Keras 2.6.0, to run the code
developed in Python 3.7 using the Spyder IDE 4.2.5.
In order to complete the code, a massive Nvidia RTX
3070 graphics card equipped with 8 GB DDR6 is
utilized. Through the use of the Adam optimizer. The
3MDAD dataset is divided into three parts, the
training data make up 70% of the whole dataset, while
the validation data are 10% and the test data are 20%.
4.3 Evaluation of HSA network
Many practical experiments are conducted to make an
outstanding evaluation of our HSA network.
4.3.1 Quantitative Results
Our comparison is conducted, on the one hand, using
hybrid network-based methods called LRCN
(Jegham, 2021) without any attention mechanism and
using different pre-trained CNN architectures
including Inception v3, VGG19 and VGG16. Our
previous proposed spatial attention-based method
MCSH (Abdullah, 2022) is used, on the other hand.
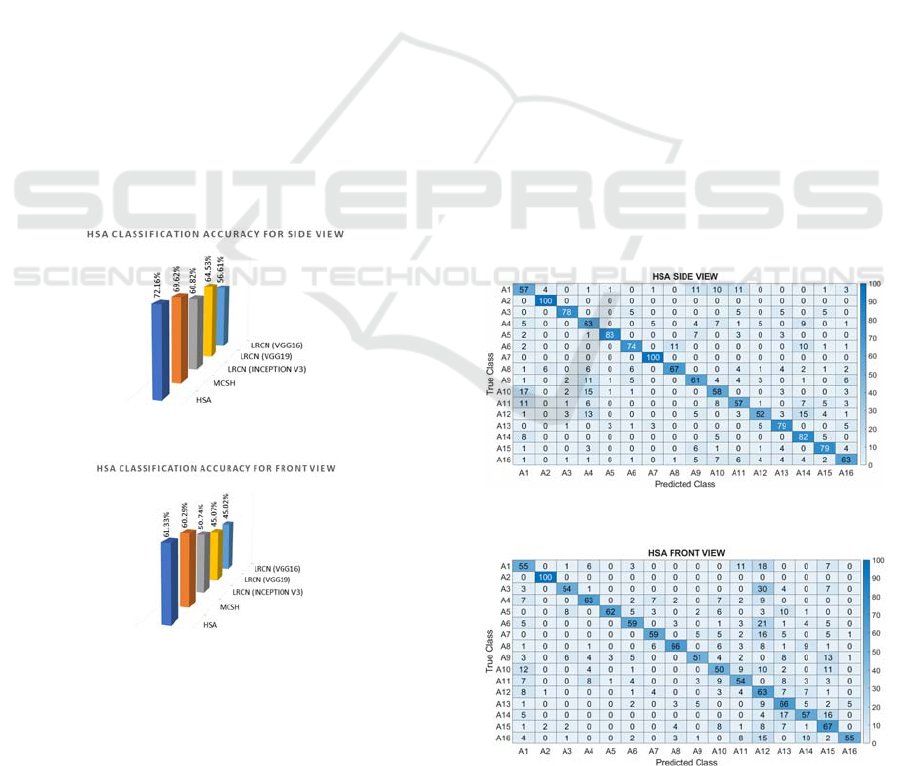
The obtained results are depicted in Figure 6 for side
view and in Figure 7 for front view. We notice that
our proposed HSA outperforms the-state-of-the-art
methods for the two views in terms of accuracy.
Figure 6: Classification accuracy for side view.
Figure 7: Classification accuracy for front view.
When compared to its rival, the HSA classification
accuracy statistics demonstrate a significant
improvement. In point of fact, compared to other
methods, the accuracy of the HSA recognition system
has increased by 3% to 25% in side view and by 1%
to 15% in front view. It is important to note that the
side view is always more accurate than the front view.
This is because of the occlusion present in the front
view. The accuracy has reached more than 72 % in
the side view and more than 61 % in the front view.
These are very significant percentages in driver action
classification at night.
4.3.2 Qualitative Results
When comparing our proposed HSA to other deep
learning techniques, it achieves very promising
results. This is due to its reliance on highly sensitive
spatial attention for night images. It is noticeable that
the proposed algorithm provides remarkable results
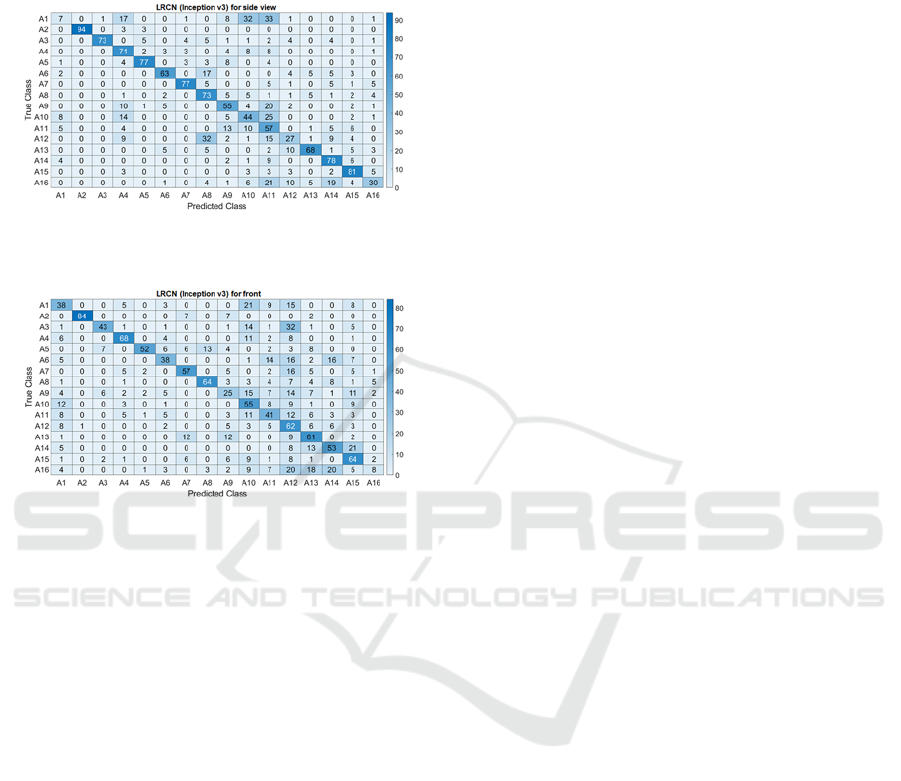
through the confusion matrices. Figure 8 and Figure
9 illustrate the confusion matrices of our proposed
HSA, whereas Figure 10 and Figure 11 depict the
confusion matrices of the best deep learning method
without attention block LRCN (Inception V3).
According to Figure 8 and Figure 9, general
improvement is noticed. Some actions achieve a
100% discrimination, for example A2 and A7 in side
view and A2 in front view. In addition, for the side
view, the A5 and A14 have more than 80%
classification accuracy and the rest of actions range
between 52% and 79%. For the front view no action
recorded less than 51% accuracy despite the wide
range of naturalistic driving issues, principally the
high interclass similarity and interclass variability
present. Finally, as it is clear, there was a significant
Figure 8: Confusion matrix of HSA for side view.
Figure 9: Confusion matrix of HSA for front view.
Hard Spatial Attention Framework for Driver Action Recognition at Nighttime
969
improvement in most of the action in the side view
like A1, A12 and A16, as well as in the frontal view
also; there was a significant improvement in the A1,
A9 and A16.
Figure 10: Confusion matrix of LRCN (Inception V3)
network for side view.
Figure 11: Confusion matrix of LRCN (Inception V3)
network for front view.
5 DISCUSSIONS
Our proposed algorithm provides high performance
and outstanding accuracy results due to the correct
interpretation of nighttime images by adopting spatial
attention and using a hybrid deep learning algorithm.
Because of low illumination, image quality is bad.
Thus, we must use a function that is not completely
linear in its behaviour as a piece-wise linear
transformation function with a morphological
operation to expand image pixels and fill the hole in
the image and then remove or close the smallest
objects to create a mask that will be used to perform
a hard cut mechanism. Thus, we obtain rich, focused
information that can be useful in issuing the decision
and shortening a significant amount of useless data as
a black area, thus shortening the time, which
significantly speeds up the implementation process.
We perform the HSA on a multiview dataset (side and
front views). In order to ensure the best accuracy and
reliability of our proposed method, we obtained more
than 72% accuracy, which is the highest percentage
that has been achieved so far in the literature in this
field in a realistic and uncontrolled environment.
6 CONCLUSIONS
In this paper, we propose a novel hard spatial
attention network for driver action recognition at
nighttime by performing a projection of the mask
performed by a series of advanced image processors
and using an LBP descriptor to reach a high level of
accuracy. In fact, the described process adds a
cognitive mechanism to a hybrid network based on
Inception V3 to mainly focus on relevant information
in the driving scene. The proposed approach achieved
our contribution that was mentioned in the
introduction by improving classification accuracy on
the 3MDAD dataset by up to 72% in the side view
and 61% in the front view.
REFERENCES
Abdullah, K., Jegham, I., Khalifa, A. B., & Mahjoub, M. A.
(2022, May). A Multi-Convolutional Stream for Hybrid
network for Driver Action Recognition at Nighttime. In
2022 8th International Conference on Control, Decision
and Information Technologies (CoDIT) (Vol. 1, pp.
337-342). IEEE. DOI: 10.1109/CoDIT55151.2022.
9804013.
Alotaibi, M., & Alotaibi, B. (2020). Distracted driver
classification using deep learning. Signal, Image and
Video Processing, 14(3), 617-624. https://doi.
org/10.1007/s11760-019-01589-z
Chung, J., Gulcehre, C., Cho, K., & Bengio, Y. (2014).
Empirical evaluation of gated recurrent neural networks
on sequence modeling. arXiv preprint
arXiv:1412.3555. https://doi.org/10.48550/arXiv.1412.
3555
Correia, A. D. S., & Colombini, E. L. (2021). Attention,
please! a survey of neural attention models in deep
learning. arXiv preprint arXiv:2103.16775. https://
doi.org/10.48550/arXiv.2103.16775
da Silva Simões, A., Colombini, E. L., & Ribeiro, C. H. C.
(2016). CONAIM: A conscious attention-based
integrated model for human-like robots. IEEE Systems
Journal, 11(3), 1296-1307. DOI: 10.1109/JSYST.
2015.2498542
Du, W., Wang, Y., & Qiao, Y. (2017). Recurrent spatial-
temporal attention network for action recognition in
videos. IEEE Transactions on Image Processing, 27(3),
1347-1360. DOI: 10.1109/TIP.2017.2778563
GeeksforGeeks, “Piecewise-Linear Transformation
Functions,” 2019, last accessed 1/08/2022. [Online].
Available: https://www.geeksforgeeks.org
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
970

Gonzalez RC, Woods RE. Digital Image Processing. 4th
edition. New York, NY: Pearson; 2017. http://14.
139.186.253/2354/1/67747.pdf
Gruber, N., & Jockisch, A. (2020). Are GRU cells more
specific and LSTM cells more sensitive in motive
classification of text?. Frontiers in artificial
intelligence, 3, 40. https://doi.org/10.3389/frai.2020.
00040
Guo, M. H., Xu, T. X., Liu, J. J., Liu, Z. N., Jiang, P. T.,
Mu, T. J., ... & Hu, S. M. (2022). Attention mechanisms
in computer vision: A survey. Computational Visual
Media, 1-38. https://doi.org/10.1007/s41095-022-
0271-y
Hochreiter, S., & Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8), 1735-1780. DOI:
10.1162/neco.1997.9.8.1735
Hu, Y., Lu, M., & Lu, X. (2018, November). Spatial-
temporal fusion convolutional neural network for
simulated driving behavior recognition. In 2018 15th
International Conference on Control, Automation,
Robotics and Vision (ICARCV) (pp. 1271-1277).
IEEE. DOI: 10.1109/ICARCV.2018.8581201
Hu, Y., Lu, M., & Lu, X. (2019). Driving behaviour
recognition from still images by using multi-stream
fusion CNN. Machine Vision and Applications, 30(5),
851-865. https://doi.org/10.1007/s00138-018-0994-z
Hu, Y., Lu, M., & Lu, X. (2020). Feature refinement for
image-based driver action recognition via multi-scale
attention convolutional neural network. Signal
Processing: Image Communication, 81, 115697.
https://doi.org/10.1016/j.image.2019.115697
Hu, Y., Lu, M., Xie, C., & Lu, X. (2021). Video-based
driver action recognition via hybrid spatial–temporal
deep learning framework. Multimedia Systems, 27(3),
483-501. https://doi.org/10.1007/s00530-020-00724-y
Huang, D., Shan, C., Ardabilian, M., Wang, Y., & Chen, L.
(2011). Local binary patterns and its application to
facial image analysis: a survey. IEEE Transactions on
Systems, Man, and Cybernetics, Part C (Applications
and Reviews), 41(6), 765-781. DOI:
10.1109/TSMCC.2011.2118750
Jegham, I., Khalifa, A. B., Alouani, I., & Mahjoub, M. A.
(2020). Soft spatial attention-based multimodal driver
action recognition using deep learning. IEEE Sensors
Journal, 21(2), 1918-1925. doi: 10.1109/JSEN.
2020.3019258.
Jegham, I., Khalifa, A. B., Alouani, I., & Mahjoub, M. A.
(2020). A novel public dataset for multimodal
multiview and multispectral driver distraction analysis:
3MDAD. Signal Processing: Image Communication,
88, 115960. doi: 10.1016/j.image.2020.115960.
Knowledge Center, “Categorical crossentropy” 2022, last
accessed 1/08/2022. [Online]. Available: https://
peltarion.com/knowledge-center/documentation/mode
ling-view/build-an-ai-model/loss-functions/categorical
-crossentropy
Koesdwiady, A., Soua, R., Karray, F., & Kamel, M. S.
(2016). Recent trends in driver safety monitoring
systems: State of the art and challenges. IEEE
transactions on vehicular technology, 66(6), 4550-
4563. DOI: 10.1109/TVT.2016.2631604
Kong, Y., & Fu, Y. (2022). Human action recognition and
prediction: A survey. International Journal of Computer
Vision, 130(5), 1366-1401. DOI https://doi.org/10.
1007/s11263-022-01594-9
Kopuklu, O., Zheng, J., Xu, H., & Rigoll, G. (2021). Driver
anomaly detection: A dataset and contrastive learning
approach. In Proceedings of the IEEE/CVF Winter
Conference on Applications of Computer Vision (pp.
91-100). https://doi.org/10.48550/arXiv.2009.14660
NSC, “The Most Dangerous Time to Drive”, 2022, last
accessed 26/08/2022 [Online]. Available: https://
www.nsc.org/road/safety-topics/driving-at-night.
Santana, A., & Colombini, E. (2021). Neural Attention
Models in Deep Learning: Survey and Taxonomy.
arXiv preprint arXiv:2112.05909. https://doi.org/
10.48550/arXiv.2112.05909
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., ... & Rabinovich, A. (2015). Going
deeper with convolutions. In Proceedings of the IEEE
conference on computer vision and pattern recognition
(pp. 1-9). foundation.org/openaccess/content_cvpr_
2015/papers/Szegedy_Going_Deeper_With_2015_CV
PR_paper.pdf
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., & Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. In Proceedings of the IEEE
conference on computer vision and pattern recognition
(pp. 2818-2826).
Tran, D., Manh Do, H., Sheng, W., Bai, H., & Chowdhary,
G. (2018). Real‐time detection of distracted driving
based on deep learning. IET Intelligent Transport
Systems, 12(10), 1210-1219. https://doi.org/10.1049/
iet-its.2018.5172
Ullah, A., Ahmad, J., Muhammad, K., Sajjad, M., & Baik,
S. W. (2017). Action recognition in video sequences
using deep bi-directional LSTM with CNN features.
IEEE access, 6, 1155-1166. DOI: 10.1109/
ACCESS.2017.2778011
Wang, K., Chen, X., & Gao, R. (2019, December).
Dangerous driving behavior detection with attention
mechanism. In Proceedings of the 3rd International
Conference on Video and Image Processing (pp. 57-
62). https://doi.org/10.1145/3376067.3376101
WHO, “Road traffic injuries,” 2022, last accessed
1/08/2022 [Online]. Available: https://www.who.int/
news-room/fact-sheets/detail/road-traffic-injuries.
Xing, Y., Lv, C., Wang, H., Cao, D., Velenis, E., & Wang,
F. Y. (2019). Driver activity recognition for intelligent
vehicles: A deep learning approach. IEEE transactions
on Vehicular Technology, 68(6), 5379-5390. DOI:
10.1109/TVT.2019.2908425
Hard Spatial Attention Framework for Driver Action Recognition at Nighttime
971
