
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor
Performance in a Use Case of Highly Automated Driving Systems
Marzana Khatun
1 a
, Mark Liske
1
, Rolf Jung
1
and Michael Glaß
2 b
1
Institute for Advanced Driver Assistance Systems and Connected Mobility, Kempten University of Applied Sciences,
BahnhofstraSSe 61, Kempten (Allg
¨
au), Germany
2
Institute of Embedded Systems/Real-Time Systems, University of Ulm, Albert-Einstein-Allee 11, Ulm, Germany
Keywords:
HAD, SOTIF, FuSa, MATLAB, Radar Sensor.
Abstract:
The development of Highly Automated Driving (HAD) systems is necessary for automated vehicles in terms
of various complex functionalities. HAD systems consist of complex structures containing different types of
sensors. The functionality of HAD systems needs be tested to ensure the overall safety of automated vehicles.
Methods such as real-world testing require a large number of driving miles and are enormously expensive and
time-consuming. Therefore, simulation-based testing is widely accepted and applicable in the development of
HAD systems, including sensor performance improvement. In order to identify the functional insufficiency
of such sensors that affect the safety of HAD systems, it is critical to test these sensors extensively under a
variety of conditions such as, road types, environment and traffic situations. Based on this motivation, the main
contributions of this paper are as follows: First, a simulation-based test concept of radar sensors with methods
for the Safety Of the Intended Functionality (SOTIF) use case is presented. Second, a specific radar effect is
evaluated through simulation-based testing of two different radar models to support and realize the sensor’s
functional insufficiency. Finally, the development of a filter is proposed to improve the sensor performance
considering the radar specific multipath propagation effects.
1 INTRODUCTION
The development of Highly Automated Driving
(HAD) systems depends not only on the vehicle’s op-
erational functions, but also on the perception of situ-
ations obtained by the support of sensors used in au-
tomated vehicles. The reliability of the HAD systems
functionality depends on the perception of environ-
ment and driving situations (Berk et al., 2020). Ac-
cording to Society of Automotive Engineers (SAE),
automation levels are divided into six levels from
level 0 (no driving automation) to level 5 (full driving
automation) (SAEJ3016, 2021). In this paper, HAD
systems indicate the systems that are applicable to au-
tomation level 3 (conditional driving automation) to
level 5 vehicles.
A concern has been raised in HAD systems devel-
opment about incorrect situational awareness in terms
of sensor’s and algorithm’s functional insufficiency
(ISO21448, 2022; Becker et al., 2020). On the one
hand, Functional Safety (FuSa) has targeted the op-
a
https://orcid.org/0000-0002-3839-1575
b
https://orcid.org/0000-0002-8006-8843
erational functions of HAD systems such as lateral
and longitudinal vehicle control (ISO26262, 2018).
On the other hand, Safety Of The Intended Function-
ality (SOTIF) has focused on the functional insuffi-
ciency that can lead to a hazardous situation or harm
(ISO21448, 2022).
HAD systems consist of complex architectural
structure considering the hardware, software, algo-
rithms, interaction with human. The potential haz-
ardous situations caused by the performance insuffi-
ciency of sensors are addressed in SOTIF, focusing on
the triggering events that cause hazardous behaviors
for specific use cases. HAD systems rely on sensor
technology to predict the environment and situations.
Based on this prediction, the systems make diving de-
cisions (Khatun et al., 2020; Mazzega, 2019; Leither
et al., 2020). Thus, the sensor model has a signifi-
cant role in automated driving development, and fur-
ther research and simulation-based testing are in de-
mand (Khatun et al., 2021b; Khatun et al., 2021a). In
this paper, simulation-based process is described for
a radar sensor including the investigation of the per-
formance and possible improvement is proposed by
42
Khatun, M., Liske, M., Jung, R. and Glaß, M.
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor Performance in a Use Case of Highly Automated Driving Systems.
DOI: 10.5220/0011828700003399
In Proceedings of the 12th International Conference on Sensor Networks (SENSORNETS 2023), pages 42-53
ISBN: 978-989-758-635-4; ISSN: 2184-4380
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

developing a filter for a specific SOTIF related use
case.
The structure of this paper is as follows: a brief
description of HAD systems and sensor’s functional
insufficiency considering the available standards and
techniques are stated in section 2. The sensor related
activities and a specific use case are outlined in sec-
tion 3 together with the sensor model architectures.
Section 4 contains a description of the simulation-
based testing approach and the test methods with the
results. Finally, section 5 concluded the outcomes of
this study and provides an outlook on further research
aspects.
2 STATE-OF-THE-ART
Advanced driver assistance systems provide support
to reduce the number of road accidents and increase
human comfort. The automotive technologies are
rapidly evolving in each stages of road vehicle safety.
Now-a-days, new or adjusted methods and technolo-
gies have been applied in concept phase, develop-
ment, production, operational, deployment of HAD
systems (UL4600, 2022; IEC/TR63069, 2019; Valdez
Banda and Goerlandt, 2018). HAD systems include
several advanced driver assistance functions, such as
automated driving from point A to point B without
human intervention. In this work, for simplicity and
easier expression, the term HAD systems has been
used to define the vehicle systems used for the entire
dynamic driving task in automation level 3 to level 5
(SAEJ3016, 2021).
Hazards caused by the malfunction behaviors of
automotive Electrical and Electronic (E/E) elements
are the prime focused of FuSa (ISO26262, 2018).
Hazards originated from incorrect situational aware-
ness and insufficient specification or performance in-
sufficiency are covered by SOTIF (ISO21448, 2022).
According to ISO 21448, SOTIF is defined as, ab-
sence of unreasonable risk due to hazards resulting
from functional insufficiencies of the intended func-
tionality or its implementation. Functional insuffi-
ciency reflects the limitation in technical capability
of an E/E element or subsystems. The functional in-
sufficiency can be known or unknown for a E/E ele-
ments (ISO21448, 2022). SOTIF focuses on the sys-
tem behavior, the interaction with the driver as well
as address foreseeable misuse by the driver or other
people including risk mitigation approaches (Yu et al.,
2022; Becker et al., 2020). Camera and LIDAR dis-
tortion phenomena as sensor imperfection that can
cause malfunction behavior of HAD systems have
been mentioned in (Martin et al., 2019). Further-
more, the highway chauffeur system is considered by
NHTSA to analysis the SOTIF of lane centering and
lane changing maneuvers of a generic Level 3 (Becker
et al., 2020). These has been considered as a knowl-
edge for radar sensor performance investigation and
its improvement.
In HAD system radar has become one of the ma-
jor sensors that has bee applied in advanced func-
tions such as collision avoidance, object detection
of road and support in decision-making algorithms.
Radar sensor has been used as a primary sensor in
safety critical systems (Parker, 2017). The Radar (Ra-
dio Detection and Ranging) technology in HAD sys-
tem is applied to detect and locate objects of inter-
est. The objects of interest in automotive applications
are road users such as ego-vehicle and/or other road
users (pedestrian, leading/lagging vehicles motorcy-
cles, trucks) including obstacles on the road for ex-
ample guard rails. One other essential function of the
radar is to determine the velocity of those objects rel-
ative to the radar sensor (Winner et al., 2015).
Besides the determination of the distance and ve-
locity, the radar also can measure the angular position
of the target relative to the position, where the radar
sensor is located. The angular position can be deter-
mined due to the directive characteristics of the radar
antenna (Schlager et al., 2020). By mixing the two re-
ceived signals, the angular position can be determined
due to the phase shift. A list of radar effects is as fol-
lows (Zhou et al., 2022; Schlager et al., 2020; Herz
et al., 2019):
• Multipath propagation
• Weather and atmospheric attenuation
• Secondary surface effects of the radar signal.
• Inter-sensor-interference
The radar effects are classified into four areas of the
resulting detection as, (i) False Negative, (ii) True
Positive, (iii) False Positive, and (iv) True Negative.
The area true positive has referred as the correct pre-
diction of targets when its present. False positive has
detected the prediction which are not real. Thus, the
radar sensor perceives predictions that are not repre-
sented in the real world. The corresponding effect in
this area is the multipath propagation. Furthermore,
false negative detection occurs when the Signal-to-
Noise Ratio (SNR) of the radar signal is too low and
the radar sensor fails to detect the target. The true
negative is the area range in which the radar sensor
predicts correctly that there is not actual target present
(Schlager et al., 2020).
Multipath propagation of a radar signal has been
categorized into two types depending on the position
of the resulting ghost target. Type 1 has referred to
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor Performance in a Use Case of Highly Automated Driving Systems
43

propagation paths where the resulting ghost target ap-
pears on the same side as the radar and the actual tar-
get with respect to the reflecting surface. Addition-
ally, type 2 has referred to propagation paths, where
the ghost target appears on the other side of the reflec-
tive surface (Zhou et al., 2022). Multipath propaga-
tion can be described as follows, while waves operate
in a particular spectrum, some surfaces can act like
mirrors. Waves hitting such surfaces can be reflected
at a certain angle in a different direction. This be-
havior causes the transmitted radar signals to take de-
tours between the antenna and the target. This radar-
specific property can therefore result in ghost targets
in the measurement. Since these ghost targets have
similar dynamics as the real targets, it is difficult to
identify and eliminate them. In this paper, the multi-
path propagation effect for radar sensor in a specific
SOTIF use case has been investigated.
3 CONCEPT AND METHODS
3.1 Sensor Activities
The procedure of SOTIF process are described in ISO
21448:2022 with eight key steps describe as, (i) func-
tional and system specification, (ii) SOTIF related
Hazard analysis and risk assessment (HARA), (iii)
identification and evaluation of triggering events, (iv)
functional modifications to reduce the SOTIF related
risks, (v) defining of Verification and Validation (V&
V), (vi) verification of the SOTIF known unsafe sce-
narios, (vii) verification of unknown unsafe scenarios
and (viii) strategy for SOTIF related product release
(ISO21448, 2022). For the evaluation of the radar
sensor, identification and assessment of the triggering
conditions is required. The functional modifications
have been essential to reduce the SOTIF risks are con-
sidered with respect to a specific system specification.
The radar sensors are often used for environment de-
tection in HAD systems, such as Highway Chauffeur
belongs to the SAE level 3 (Becker et al., 2020). The
task of these sensors is, on the one hand, to detect ob-
jects at an early stage so that the system has enough
time to react with a suitable maneuver. On the other
hand, the sensors should detect objects with sufficient
certainty so that the detected objects are not misinter-
preted by the system.
As a first activity, radar sensor function has been
defined as object detection in the highway while per-
forming dynamic driving tasks. It is assumed that, the
HAD system has the capability to activate and deacti-
vate the sensor function as indented. Secondly, mod-
eling scenarios based on the known system limitations
are investigated including the environmental condi-
tions that may may exceed the system limitations and
potentially could trigger hazardous situations. Lastly,
functional modification to reduce the sensor related
risks need to be identified based on the SOTIF re-
lated HARA such as, improvement of radar sensor’s
algorithms, modification of radar sensor location, im-
plementation of detection by means of sensor distur-
bance and triggers warnings and uses of multiple sen-
sors and/or sensor fusion.
3.2 Use Case
A use case has described a suite of related scenarios
including additional information such as, functional
range, desired behavior, system boundaries, environ-
mental assumption and human operation. A scenario
consists of several scenes and a sequence of scenes
along with a specific situation, actions and events
(ISO21448, 2022). ISO 21448 has detailed the defi-
nition of scene as, a scene can include environmental
elements (state, time, weather, lighting and other sur-
rounding conditions), road infrastructure or internal
elements (road or interior geometry, topology, qual-
ity, traffic signs, barriers, etc.) and objects/actors
(static, dynamic, movable, interactions, manoeuvres
if applicable) (ISO21448, 2022). Moreover, accord-
ing to ISO 21448 triggering condition is defined as,
a specific condition of a scenario that serves as an
initiator for a subsequent system reaction contribut-
ing to either a hazardous behaviour or an inability to
prevent or detect and mitigate a reasonably foresee-
able indirect misuse (ISO21448, 2022).
The HAD system is designed to be activated only
on the highway as a chauffeur (Becker et al., 2020;
IEC/TR63069, 2019). In addition, the highway must
be divided by guardrails and have clear lane markings.
However, there are some sections on the highways for
which the system is not designed. For example, such
sections can include construction sites, police check-
points, toll booths and intersections. In this case, nav-
igation at on-ramps and off-ramps is also not provided
by the chauffeur system on the highway. Moreover,
the system under consideration is not designed to op-
erate in extreme weather conditions (e.g. heavy rain,
fog) affects the system in such a way that it can no
longer perform the driving task due to poor visibility.
A highway in Germany typically consists of two
driving lanes and one shoulder lane. An essential
component of highways is guardrails, that are used
to enclose the road, to prevent vehicles to get off the
road (FGSV, 2011). The desired behavior of the radar
sensor is the detection of road users and determin-
ing the position, the velocity, and the angular posi-
SENSORNETS 2023 - 12th International Conference on Sensor Networks
44
tion relative to the ego-vehicle. A set of triggering
conditions related to radar sensor has been described
in (Becker et al., 2020). Among them is, RS-4: the
radar many not detect certain environmental feature
with sufficient confidence, such as guardrails (Becker
et al., 2020). The RS-4 triggering condition has been
examined in this paper using simulation-based test-
ing to identify the sensor functional insufficiency and
possible improvements.
The use case in this analysis has therefore been
based on the likely use case of the chauffeur system
for highways, where an ego-vehicle follows a lead ve-
hicle on a highway. A radar sensor has been mounted
on the ego-vehicle to perceive targets in the environ-
ment. Moreover, the effect of multipath propagation
has been taken into account in the simulation to eval-
uate the radar sensor’s ability to perceive the envi-
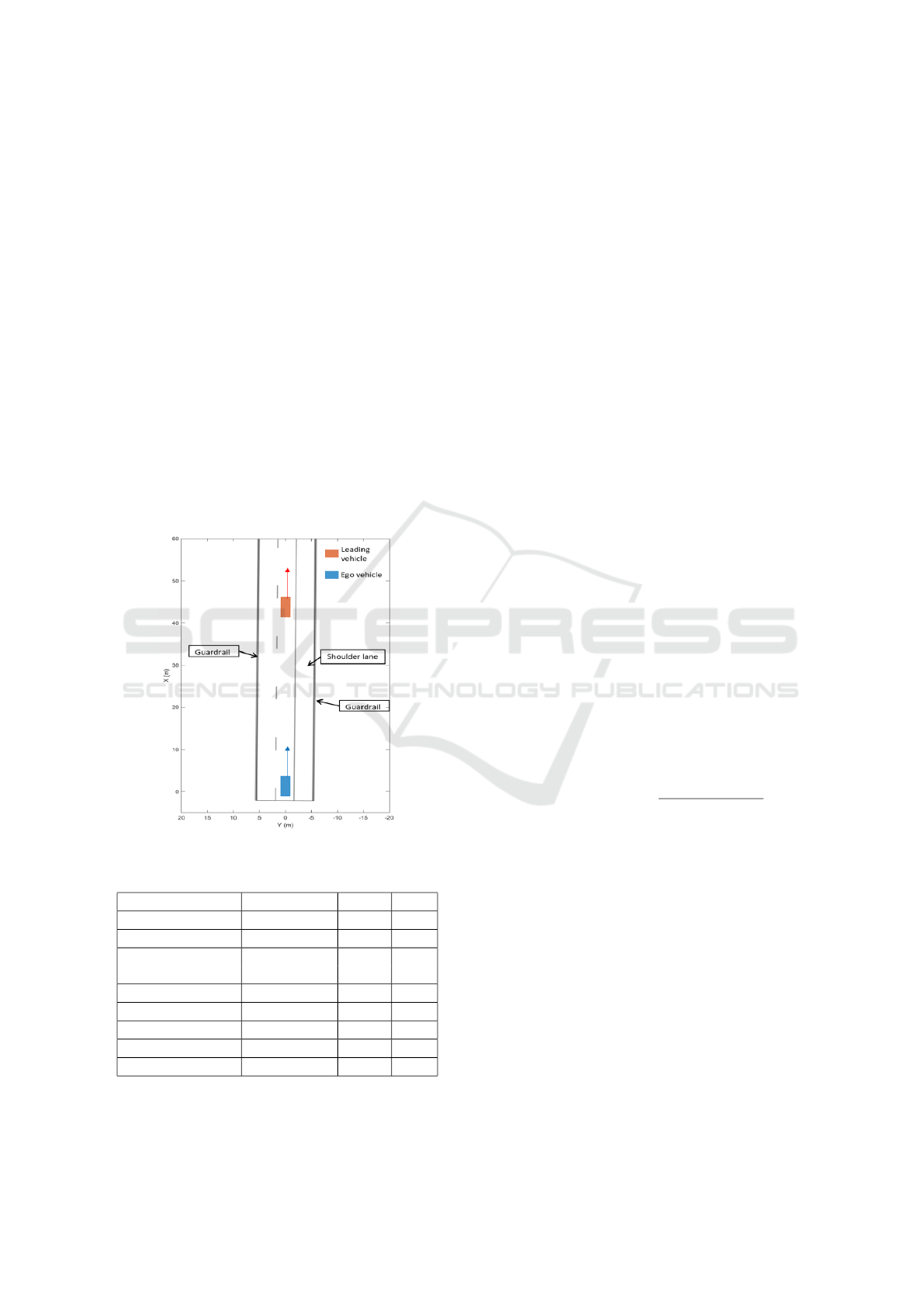
ronment. The use case is depicted in the Figure 1
where, the radar has been mounted at the front the
ego-vehicle (blue color) and the guardrail (bold black
color) and the leading vehicle (orange color).
Figure 1: Use case concrete scenario modeling.
Table 1: Scenario modeling parameters.
Object Measure Value Unit
Ego-vehicle Velocity 27 m/s
Lead Vehicle Velocity 27 m/s
Distance Distance 40 m
between vehicles
Simulation Duration 4 s
Simulation Sample time 0.1 s
Driving lane Width 3.75 m
Shoulder lane Width 3 m
Guardrail Height 0.75 m
The relevant parameters of the scenario are shown
in Table 1. The ego-vehicle equipped with a radar
sensor closely tracks the leading vehicle at the same
speed in meter per second (m/s). The duration of the
whole scenario is 4 seconds (s) and the sampling time
is 0.1 s. The width of the lane and shoulder are chosen
to represent a typical highway. The values used to
set up the highway have been taken from road and
transportation research association, Germany (FGSV,
2011).
3.3 Sensor Models
A statistical radar model and a physical radar model
have been examined to evaluate sensor performance,
and an use case scenario has been simulated. The
radar effect (multipath propagation) has been evalu-
ated with both sensor models to determine the poten-
tial functional insufficiency. As a by-product, poten-
tially safety-critical triggering conditions have been
achieved with respect to SOTIF and support FuSa as
well for a HAD system.
The statistical radar sensor model provided by
MATLAB corresponds to the medium-fidelity sensor
models (Schlager et al., 2020). The statistical radar
sensor model requires lower computational time than
higher fidelity sensor models. The use of statistical
radar sensor models make sense in the early begin-
ning of the developing process, where first ideas and
design trade-offs are being investigated. Due to the
relatively low computational time, it is recommended
to use this model also for longer simulations, but
also test tracking and sensor fusion algorithms (Math-
works, 2022b). The sensor model does not consider
signal processing and is only the fundamental for the
principles of automotive radar expressed as (Math-
works, 2022f):
Received power, P
r
=
P
t
∗ G
t
∗ G
r
λ
2
∗ σ
(4π)
3
∗ R
4
∗ L
(1)
Where, G
t
defines the gain of the transmitter. G
r
indi-
cates gain of the receiver. λ is the wavelength of the
radar’s operating frequency in meters (m). σ specify
the radar cross section of the target in square meters
(m
2
) R display the range between radar sensor and tar-
get in meter (m). L shows the loss factor according to
the transmitter and receiver and the propagation loss.
In radar range measurement, the maximum dis-
tance between the transceiver and the target depends
on the received power P
r
. Typically, the radar mea-
surement contains noise, so the target can only be de-
termined if the power at the receiver reaches a mini-
mum power P
rmin
. The minimum power P
rmin
has to
achieve a sufficient SNR to be distinguishable from
the noise of the radar measurement. The resulting
equation for the maximum range is as follows (Wolf,
2022):
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor Performance in a Use Case of Highly Automated Driving Systems
45
Maximumrange, R
max
=
4
s
P
s
∗ G
2
∗ λ
2
∗ σ
P
r
min
∗ (4π)
3
∗ L
(2)
Since the radar sensor uses electromagnetic waves
that are traveling between the transceiver and the tar-
get, the time-of-flight (∆t) of the signal can be mea-
sured. Relating to the speed of light c and the men-
tioned ∆t the distance R can be determined as follows
(Herz, 2017):
Distance, R =
∆t ∗ c
2
(3)
The velocity on the other hand is determined by the
Doppler effect as expressed in (Herz, 2017):
Doppler f requency, f
D
= f
r
− f
c
=
2 ∗ f
t
c
∗ v
r
(4)
The Doppler frequency F
D
can be determined by the
difference between the frequency of the transmitted
signal f
t
and the received signal f
r
or with the corre-
sponding radial velocity of the target v
r
in m/s as unit.
The I/Q stands for ”In-phase” and ”Quadrature”. I/Q
signals consist of two sinusoidal, which have identi-
cal frequencies but are 90° out of phase. I/Q signals
are amplitude modulated and the amplitude of the re-
sulting signal can be determined as follows (Podcast,
2022):
Amplitude, A =
p
I
2
+ Q
2
(5)
Here, I and Q results regarding to the angular depen-
dencies as I = A * cosθ and Q = A * sinθ. The phase
of the signal is (Podcast, 2022),
Phase, θ = tan
−1
Q
I
(6)
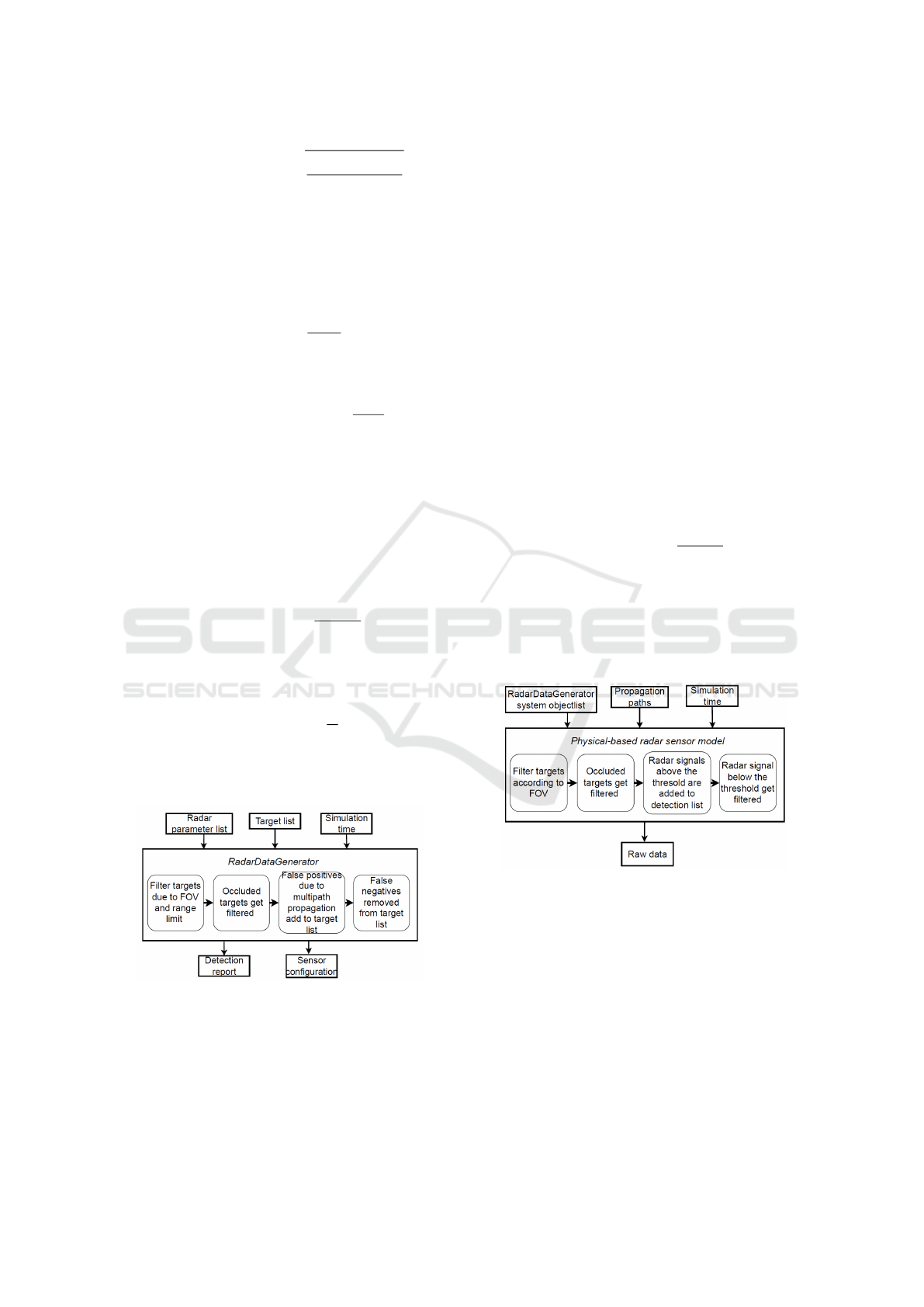
The structure of the statistical sensor model based
on the scheme of medium-fidelity has been presented
in Figure 2.
Figure 2: Block diagram of statistical radar model.
Figure 2 has the top three blocks showing the in-
puts required to create the radar sensor model. The
middle block RadarDataGenerator containing four
steps that the sensor model performs to process the
input data. The bottom portion of Figure 2 represents
the outputs provided by the radar sensor model.
The physics-based radar sensor model has also
been observed to correspond to medium accuracy sen-
sor models, such as the radar sensor model presented
for statistical radar model. The difference between
the statistical radar sensor model and the physics-
based radar model is that the latter generates sam-
pled I/Q signals. These I/Q signals are converted
into target detection. In a addition, the physics-based
model also takes into account the transmitted wave-
form, the propagation of the signal in the simulated
environment, reflections from the targets, and signals
received at the receiving facility.
The waveform of the modeled radar transceiver is
a pulse Doppler radar waveform. To set the wave-
form, the Pulse Repetition Frequency (PRF), which
is calculated from the Doppler resolution ∆ f in this
sensor model, and the number of pulses (N) has to
be determined as follows (Gamba, 2020; Mathworks,
2022i):
Pulserepetition f requency, PRF = ∆ f ∗ N
P
(7)
Magnitude, N
P
=
1
∆ f ∗ T
P
(8)
The magnitude N
p
, represents the number of pulses,
which are sent out per one measurement and is calcu-
lated as follows, where ∆f is Doppler resolution and
T
p
the pulse width.
Figure 3 depicts the structure of the physics-based
radar model.
Figure 3: Block diagram of physical-based radar model.
The physics-based radar sensor model uses MAT-
LAB’s system object radarTransceiver to generate
I/Q signals in the time domain (Mathworks, 2022i).
This virtual radar transceiver can be generated by the
equivalent radarDataGenerator, that is also needed
to create the statistical radar sensor model. Conse-
quently, it is a part of the input for the physically
based radar sensor model. The propagation paths
have been computed in an auxiliary function provided
by MATLAB. The output of this function provides in-
formation in a detailed structure of every propagation
path. The path of the signal is measured starting at the
SENSORNETS 2023 - 12th International Conference on Sensor Networks
46
transmitter and ending at the receiver. The path loss L
in decibel of the waveform λ which propagates over
the distance R in meters (m) (Mathworks, 2022c)
Pathloss, L = 20log
10
(
4πR
λ
) (9)
The reflection coefficient describes a specific magni-
tude of the propagation path depending on how many
times the signal bounces off a reflective surface. RCS
defines the reflection coefficient surface. If the signal
bounces off a surface once or twice, the reflection co-
efficient becomes smaller. It is calculated as follows,
with the corresponding radar cross section of the tar-
get and the wavelength (Mathworks, 2022a).
Re f lectioncoe f f icient, Re f
co f f
=
4π
λ
2
∗ RCS (10)
Finally, the last field of the structure contains the
Doppler shift of the received signal, which is calcu-
lated by the radial velocity (v
r
) of the target, given
in meters per second and the wavelength λ. The re-
sulting Doppler frequency ∆f is given in hertz (Math-
works, 2022h).
Doppler f requency, ∆ f =
v
r
λ
(11)
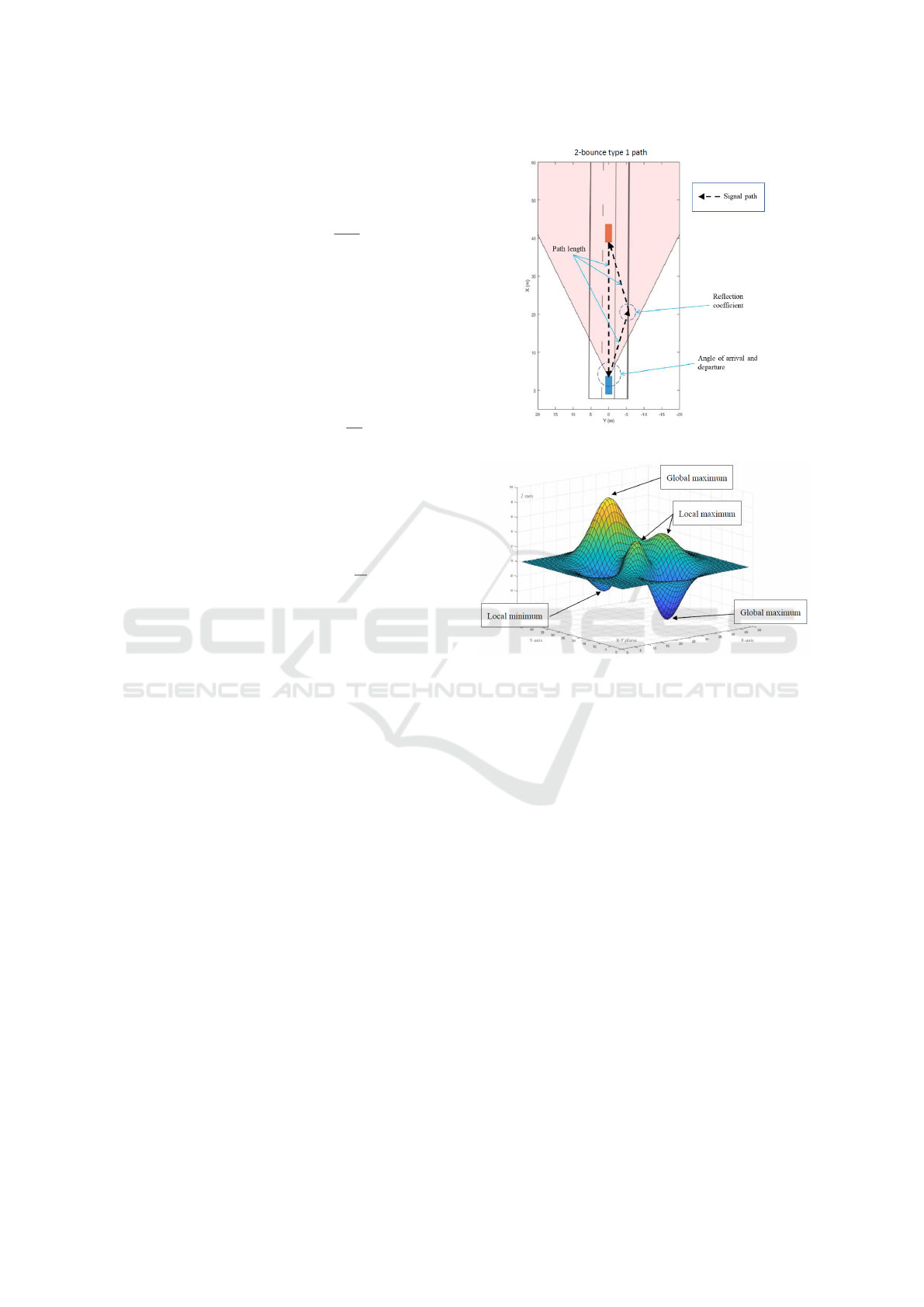
The physics-based radar sensor model has used
all propagation paths as shown in Figure 4, as input
for the radarTransceiver system object. The result-
ing output consists of the corresponding sampled I/Q
signals based on the related signal processing settings
and calculations.
Figure 5 has represented a two-dimensional data
set with local and global maxima and local and
global minima from three-dimensional surface plot
(x-y plane is defined by X and Y and Z as surface
height) (Liske, 2022). For example, the local maxima
has indicated by the values at the highest point of a
curve within a certain range. The highest and lowest
values of the entire data set has been manifested by
the global maximum and global minimum.
The resulting local maxima inclusively the global
maximum represents the SNR of the potential targets.
With the location of each local maxima in the data
set, the relative position of the target can be deter-
mined. This has been accomplished with the result-
ing location of the SNR in the corresponding fast-
time domain. Since the fast-time samples represents
the range bins, the determined location of the local
maxima in the fast-time domain is used to identify the
range. The determination of local maxima is also used
for identifying the azimuth angle of the targets. Due
to the phase shift beam-forming, each scanning angle
can be considered. Therefore, the position of the lo-
cal maxima in the second dimension of the radar data
Figure 4: Propagation path of 2-bounce type 1 properties.
Figure 5: Representation of global and local max-
ima/minima in a 2D data set (Liske, 2022).
cube indicates the corresponding angle where the tar-
get is located (Mathworks, 2022e). The local maxima
has been presented in both sensor models as simula-
tion outcomes.
4 SIMULATION-BASED TESTING
IMPLEMENTATION
4.1 Implementation
The radar-related visualization in this study consists
of the Field Of View (FOV) and radar detection rep-
resented as colored dots. Black colored dots are true
positive detection, meaning they represent detection
that have the associated signal transmitted directly be-
tween the radar and the target. The orange and red
dots indicate which propagation path the detection is
based on, as displayed in Figure 6.
The structure of the implementation process for
the statistical radar sensor model in MATLAB is
demonstrated in Figure 6. MATLAB provides an
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor Performance in a Use Case of Highly Automated Driving Systems
47
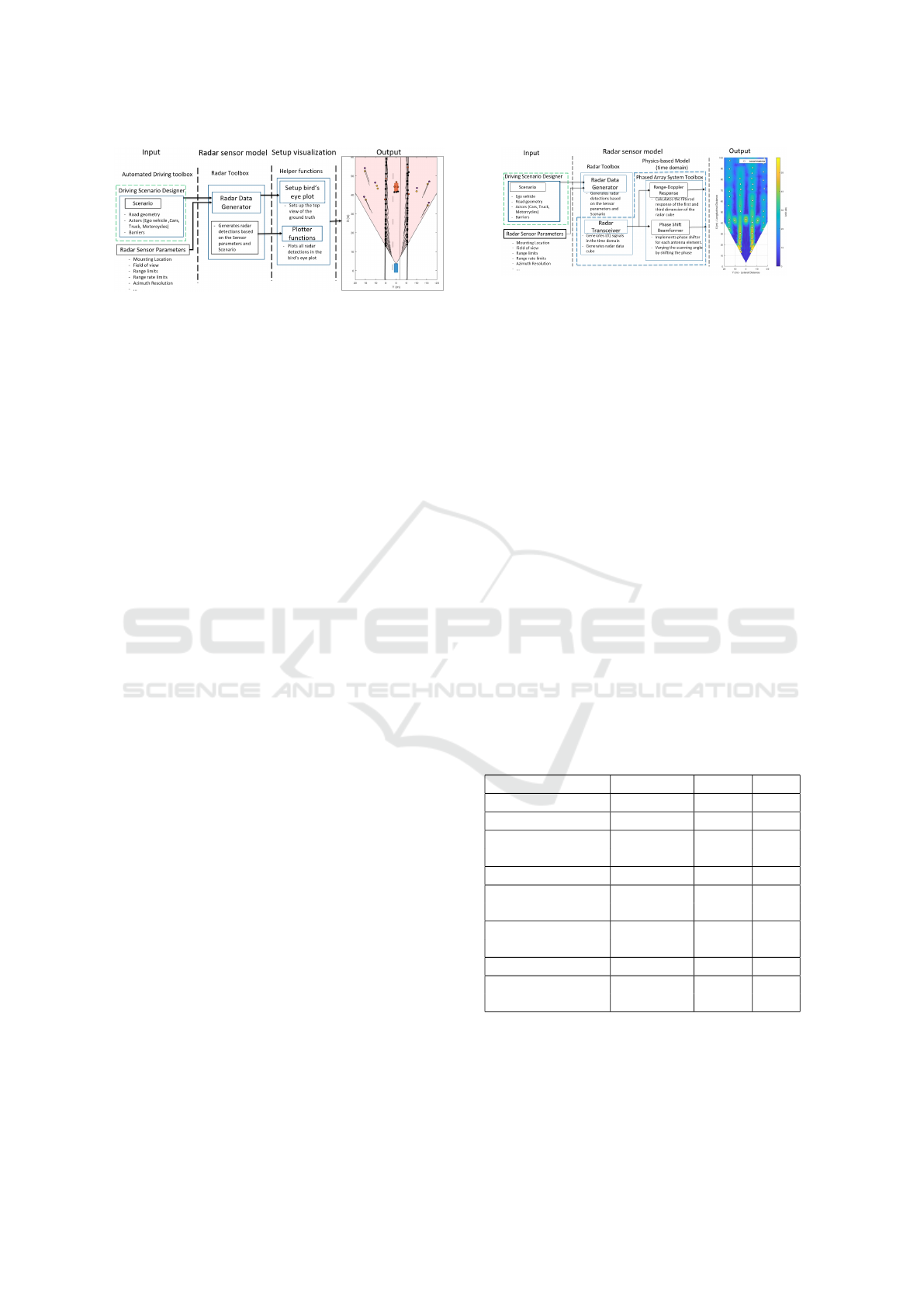
Figure 6: Implementation of statistical radar sensor model.
application, which is called “Driving Scenario De-
signer” (Mathworks, 2022g; Mathworks, 2022d).
This application has been included from the auto-
mated driving toolbox and provides a graphical in-
terface to build a scenario. The modeled scenario
has been exported as a MATLAB function and im-
plemented in the radar sensor model with the help of
Equations (1)-(6). The Radar data generator, a sys-
tem object provided by the radar toolbox generates
the detection. These detection are based on the de-
fined radar sensor parameters and the scenario param-
eters. The output of the Radar data generator is used
by so-called “helper functions” to output the visual-
ization of the scenario with the corresponding radar
detection (Mathworks, 2022g).
The physics-based radar sensor model can be seen
as the extension of the statistical radar sensor model.
A radar transceiver is modeled to generate I/Q signals
in the time domain that are represented the returning
signals. These returning signals are generated based
on the possible propagation paths which results be-
tween the environment and the radar.
In Figure 7 the radartransceiver system object
is included in the MATLAB’s radar toolbox (Math-
works, 2022b). To process the resulting radar data
cube, which contains the sampled I/Q signals, the
MATLAB’s phased array system toolbox is consid-
ered. This toolbox includes radarDopplerResponse
system object and the phaseShiftBeamformer system
object. The former one is used to process the range
by Equation (2) and Doppler information by Equation
(11), that is included in the radar data cube and the lat-
ter one is used to vary the scanning angle to extract the
angle information out of the data cube (Mathworks,
2022e).
Further, the resulting raw data can be used to visu-
alize the distribution of the SNR in the measurement
in an appropriate range-angle map, which is also rep-
resented in Figure 7.
4.2 Radar Sensor Setup and Simulation
The ego-vehicle in the use case scenario has been
equipped with a forward-facing mono-static radar.
Figure 7: Implementation of physical-based radar sensor
model.
The sensor’s transmitter and receiver are therefore lo-
cated in one place. Currently, the radar sensors used
to implement advanced driver assistance systems and
automated driving functions operate at a frequency of
76 GHz to 77 GHz (Mathworks, 2022f). The radar
sensor is located 0.2 m above the ground in the center
of the front bumper of the ego-vehicle. According to
(Ziegler et al., 2014), the FOV of the radar and the
maximum detection range are based on the setup for
the long-range radar used for the Bertha Benz test ve-
hicle. The azimuth angle resolution for conventional
radar sensors is given between 1.5° and 4° according
to (Yu et al., 2022). In the radar sensor setup pre-
sented in this paper, the azimuth angle is set to 2°
to achieve a higher resolution in the angle measure-
ment. The range resolution is set to 2.5 m and thus to
a smaller size corresponding to the length of a vehicle.
Finally, the limits of the range rate are set to the range
corresponding to the maximum allowable operating
speed of the driving function of 100 m/s. The radar
sensor has the ability to detect the varying speeds of
the targets in steps of 0.5 m/s within the distance lim-
its as listed in Table 2.
Table 2: Radar model parameters.
Object Measure Value Unit
Center frequency Frequency 77 GHz
Sensor Mounting Height 0.2 m
FOV Azimuth/ 56/9 deg
Elevation
Maximal Range Distance 60 m
Range rate Velocity -100... m/s
limits Elevation 100
Angle Azimuth 2 deg
resolution angle
Range resolution Distance 2.5 m
Range rate Velocity 0.5 m
resolution
The statistical radar sensor model has been ap-
plied to simulate the scenario described in section 3.
A snapshot of a scene from the scenario is viewed in
Figure 8. This snapshot shows the overhead view of
the scene, also referred to as a bird’s eye view. Fig-
SENSORNETS 2023 - 12th International Conference on Sensor Networks
48
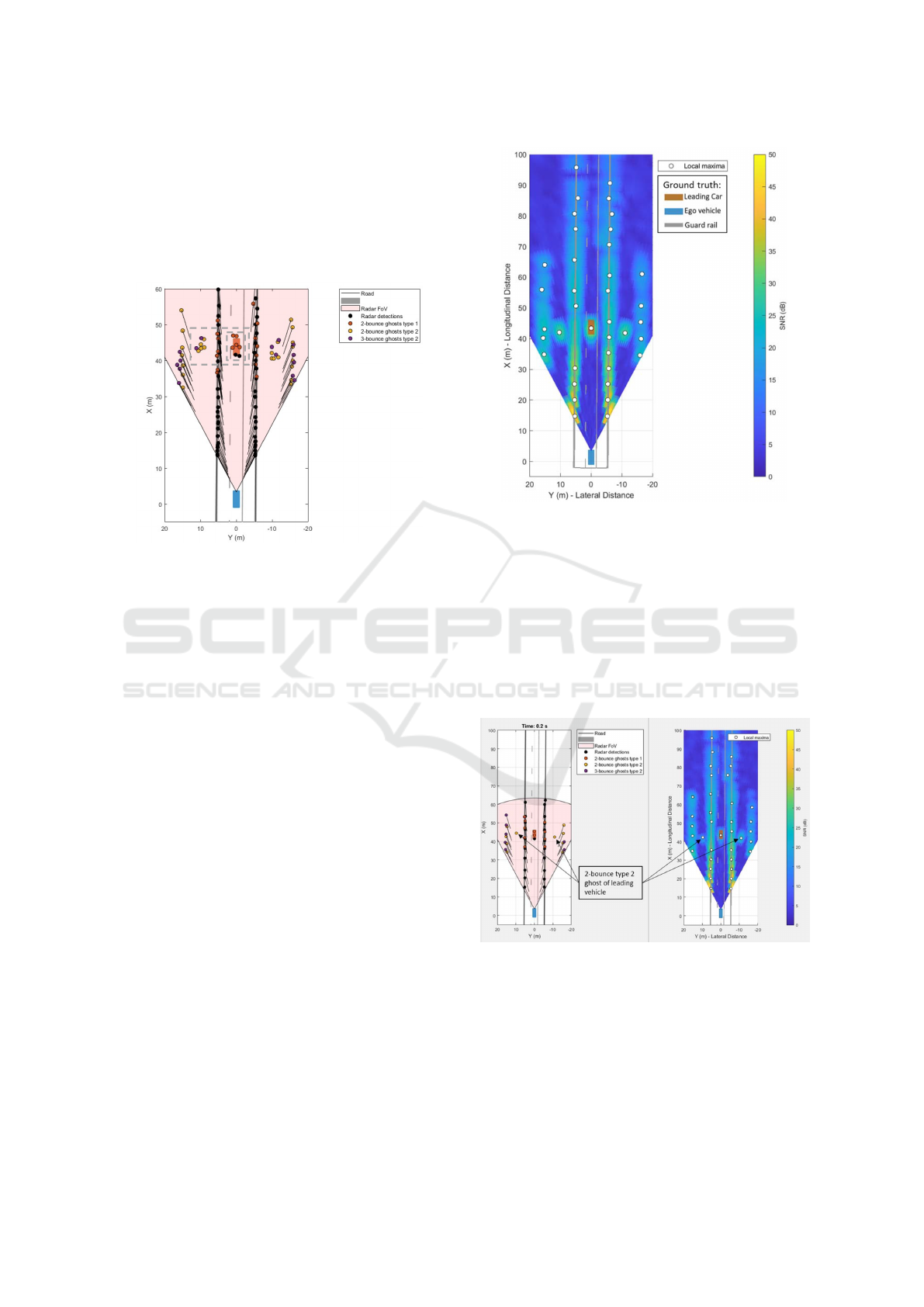
ure 8 has primarily shown the ground truth data of
the environment, which includes the road, guardrails,
and the two vehicles (ego-vehicle: blue and leading
vehicle: orange). The radar sensor’s coverage area,
which is the area defined by the specific FOV, and the
maximum coverage area are also illustrated in Figure
8.
Figure 8: Top view of the scene (statistical radar sensor
model).
The statistical radar sensor model generates a re-
port that contains information about the relative posi-
tion of each detection. Depending on the position, the
detection points are plotted as dots in the bird’s eye
view, as shown in Figure 8. Within the radar sensor’s
detection area, the radar detection points are shown as
black and colored dots as visible in Figure 8.
The physics-based sensor model includes the
radar-specific waveforms in the time domain and the
corresponding signal processing part. Since the re-
sulting output of this type of sensor model consists
of raw data, the information has to be interpreted
differently than for example the statistical radar sen-
sor model. This radar-specific raw data has included
range, angle, and Doppler information. To represent
the position of targets in a bird’s eye view, the pro-
cessed range and angle information has been used
to create the visualization. The architecture of the
physics-based sensor model was described in the pre-
vious section 3.
The Figure 9 provides a bird’s eye view of the
distribution of the SNR with the support of radar re-
ceived power that has been calculated with the support
of Equations (1), (9) and (10), together with the cor-
responding local maxima. Thus, the targets based on
the generated I/Q signals and the corresponding sig-
nal processing can be performed. The ground truth
data has been presented by Figure 9 for a specific use
case scenario.
Figure 9: Top view of the scene (physical-based radar sen-
sor model).
4.3 Results and Discussions
Since the statistical radar sensor model and the
physics-based radar sensor model are subject to dif-
ferent architectures, the output measurement varies in
some respects as marked in Figure 10. Both sides of
the Figure 10 reveal a snapshot of the scenario at time
0.2 s.
Figure 10: Snapshot of both radar sensor models.
The maximum unique detection range has been
observed in Figure 10 for both sensor models. In one
hand, the statistical radar sensor model sets its detec-
tion range only to the maximum range value as de-
fined in Table 2. On the other hand, physics-based
radar sensor model has wide range. the maximum
range is determined by the PRF. The PRF is calcu-
lated through Equation (7) and Equation (8). The PRF
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor Performance in a Use Case of Highly Automated Driving Systems
49
depends on the number of pulses that are sent out per
measurement and the range rate resolution, which is
also defined in Table 2.
Table 3: Relative position and SNR for statistical radar
model.
Properties ∆x ∆y SNR
Ground truth 42.41 m -0.05 m -
Desired 41.38 m -0.03 m 20.67 dB
detection
2-bounce 45.42 m 0.07 m 17.35 dB
type 1 ghost
2-bounce type 44.45 m 9.76 m 19 dB
2 ghost left
2-bounce type 42.34 m -10.92 m 18.81 dB
2 ghost right
Table 3 illustrates the measurement data of desired
detection, ghost detection due to multipath propaga-
tion, and ground truth data of the leading vehicle. The
ground truth is presented as the actual relative posi-
tion (∆x, ∆y) and SNR by the measurement data pro-
vided by the simulation as recorded in Table 3. For
example, The SNR rate of the desired detection has
been achieved by statistic radar model is ≈ 20 dB.
The values of the measurement according to the de-
sired detection almost correspond to the ground truth
data. This is an evidence that the black dots represent
adequate detection of the target by the radar. The red
dots are 2-bounce type 1 ghost images, meaning that
the radar signal bounces off a reflective surface on its
way to the target. Reflection off a surface results in
a longer time of flight for the radar signal and thus a
greater relative distance.
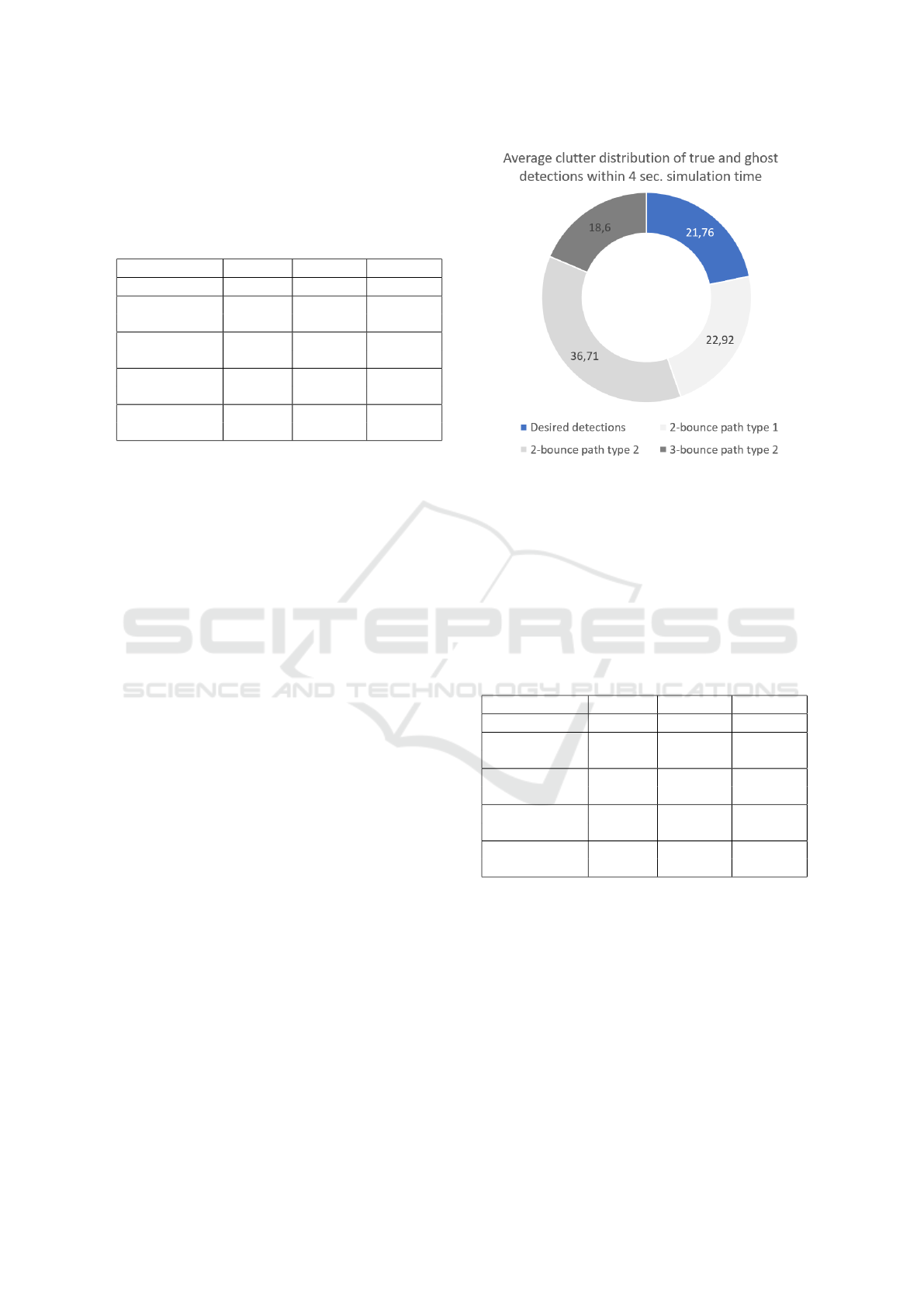
An illustration of a pie chart in Figure 11 contains
all the dynamic detection within the simulation time
of 4 s. Since the sample time of the simulation is 0.1 s,
the resulting simulation steps equal to 40. Therefore,
in every simulation step, the distribution of desired
detection and ghost detection is evaluated and added
up.
The pie chart in Figure 11 sketches the percentage
distribution of ghost detection. The greatest propor-
tion has been covered by the 2-bounce path type 2
ghosts with ≈36%. The 3-bounce path type 2 ghost
has the lowest proportion with about half of the 2-
bounce ghosts with ≈18%. The area has been cov-
ered by 2-bounce type 1 ghosts and desired detection
is ≈21% and ≈22%. respectively. According to this
analysis, the amount of ghost/false detection is rela-
tively high.
The simulation results based on the physical-
based radar has been presented in Table 4 with respect
to the outcomes as relative position (∆x, ∆y) and SNR.
Figure 11: Percentage distribution of detection for statisti-
cal radar sensor model.
The desired detection rate has SNR value of ≈25dB
for physical-based radar model. Table 3 and Table
4 have represented the relative position and the SNR
of the desired detection and the ghost detection of the
leading vehicle considering the outcomes of statistical
radar model and physical-based radar model accord-
ingly.
Table 4: Relative position and SNR for physical-based radar
model.
Properties ∆x ∆y SNR
Ground truth 42.41 m -0.05 m -
Desired 41.40 m 0 m 25.02 dB
detection
2-bounce - - -
type 1 ghost
2-bounce type 42.21 m 9.68 m 17.66 dB
2 ghost left
2-bounce type 41.85 m -10.02 m 24.01 dB
2 ghost right
In this simulation the position of the radar detec-
tions is compared with the ground truth. Addition-
ally, If a local maxima does not cover an object’s
ground truth, it will be considered as ghost target.
According to the simulation results from physical-
based radar sensor model, true detection is performed
≈49% and able to detect the leading vehicle approxi-
mately ≈94% as exhibited in Figure 12.
The results have been represented on the basis of a
”true” or ”false” detection. This is done by checking
whether a local maximum covers an object of ground
truth. If this is the case, it can be assumed that the
radar is detecting the object correctly, and the detec-
SENSORNETS 2023 - 12th International Conference on Sensor Networks
50
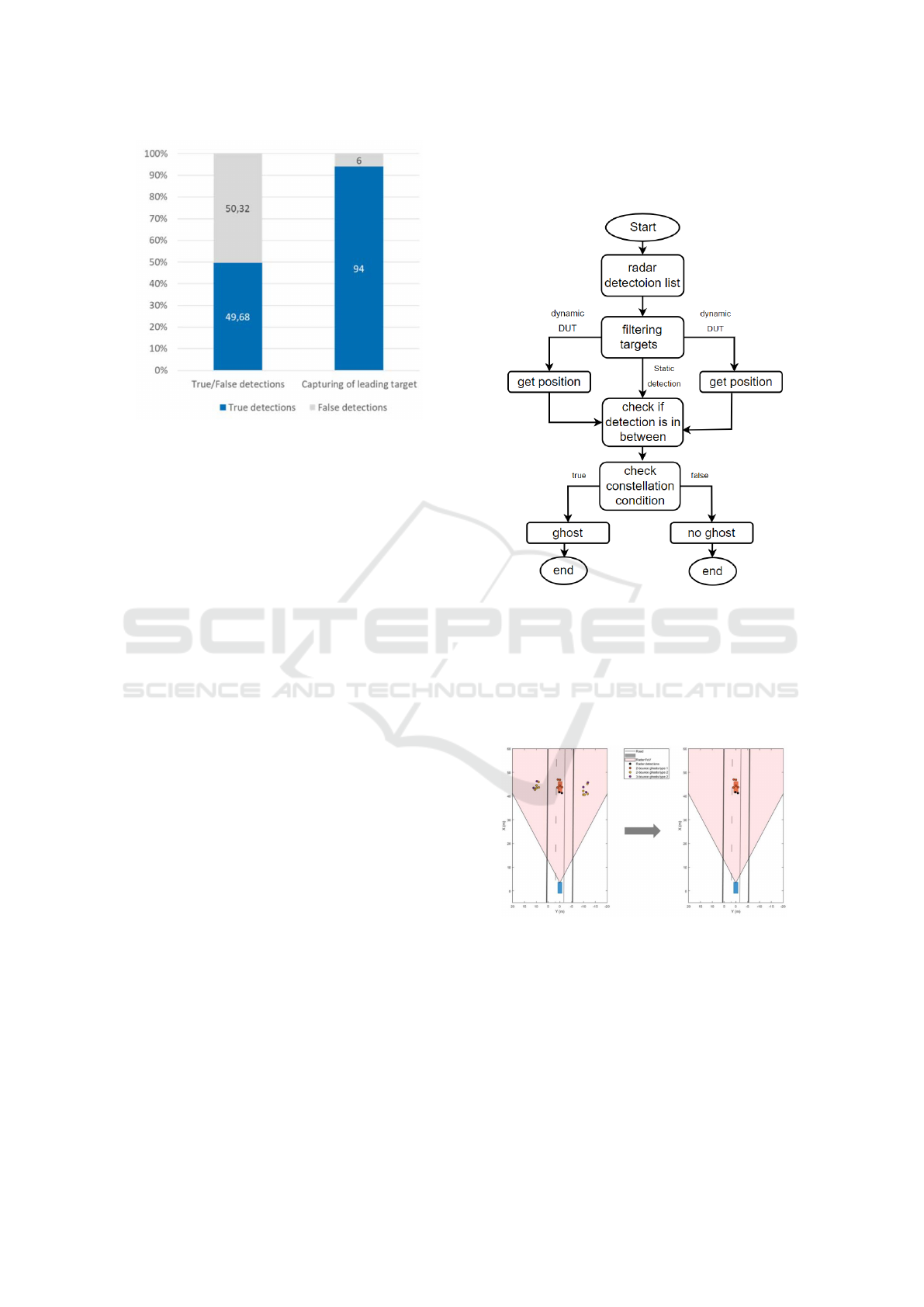
Figure 12: Detection of leading vehicle by physical-based
radar sensor model.
tion in this case is called a ”correct detection”. All
other detections that do not cover a ground truth ob-
ject are referred to as ”false detection”.
Furthermore, the simulation results validate the
detection of the leading vehicle by the radar sensor
throughout the simulation. Since the methods de-
scribed in the previous subsection consider the ground
truth object covered by a local maximum, it is possi-
ble to check whether the radar sensor detects the lead-
ing vehicle during the entire simulation.
4.4 Sensor Performance Improvement
From the simulation results of the statistical radar sen-
sor model, the highest proportion of ghost targets are
the 2-bounce type 2 ghosts. The analysis of the SNR
of the physics-based radar sensor model has shown
that such ghost detection can have characteristics like
real detection. Moreover, the physics-based radar sen-
sor model has yielded as a result that the leading vehi-
cle is captured most of the simulation time. Accord-
ing to these results, a filter development has great em-
phasis that can identify 2-bounce and 3-bounce type
2 ghosts. Hence, a filter has been modeled and tested
for the use case.
The developed filter has focused only on detec-
tion after moving objects. Since the radar sensor in
the physics-based model almost always detects the
leading vehicle, the 2-bounce type 1 ghosts are dis-
regarded in this case. For Type 2 ghost have been
located outside the road. Because the angle of the
returning signal results from the signal bouncing off
the guardrail as it returns to the sensor after reflect-
ing off the vehicle ahead, these type 2 ghost images
are projected onto the other side of the guardrail. The
concept flow diagram of the developed filter has been
laid-out in Figure 13. The following flow diagram in
Figure 13 has conveyed the rough structure of the al-
gorithm.
Figure 13: Flow diagram of the filter algorithm.
A reduced amount of type 2 ghosts points has
been the after-effect of the developed filter for statistic
radar model and appeared in the Figure 14. The left
and right sides of Figure 14 have detection points with
type 2 ghost points and the corresponding filtered type
2 ghost points.
Figure 14: Radar detection without filter (left). Radar de-
tection with filter (right).
Due to the fact that the detection list of the statis-
tical radar sensor model contains detailed data about
each detection, only the specific raw data such as rel-
ative velocity and relative position have been used to
implement the filter. Thus, it will be possible to ap-
ply this filter to the physics-based radar sensor model
as well. The first step, as shown in Figure 13, is to
filter the static objects in the radar detection list. The
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor Performance in a Use Case of Highly Automated Driving Systems
51

next step is to select a dynamic detection, called a De-
tection Under Test (DUT). This DUT has been tested
next to determine if it is a type 2 ghost. Another dy-
namic detection has to be selected from the detection
list, which can also be referred to as Detection Un-
der Comparison (DUC). Next, a check has been made
to verify whether there is a static detection between
the DUT and the DUC. If this is the case, it has been
indicated that there is a guard rail between the two de-
tections, indicating that the DUT under consideration
is a Type 2 ghost.
5 CONCLUSION
In this paper, a comprehensive methodology for
simulation-based testing of an automotive radar for a
specific SOTIF use case scenario has been presented
in a systematic manner. This study has provided a
simulation-based test concept to identify the perfor-
mance insufficiency of radar models with respect to
a use case applicable in HAD systems like highway
chauffeur. For simulating the defined use case sce-
nario two kinds of radar models are applied.
Moreover, multipath propagation effect for a radar
sensor has been evaluated by examining both statis-
tical and physical-based radar models. Therefore,
possible triggering conditions has been realized to
support the SOTIF of HAD systems. The statistical
radar model has been used to analyse the occurrence
of ghost targets due to the multipath propagation ef-
fect which leads to an inaccurate perception of the
radar sensor. The simulation results of the statisti-
cal radar sensor model have illustrate that over 75%
of the detection representing the leading vehicle are
ghost detection and thus false positives. The major-
ity of ghosts are 2-bounce type 2 ghosts. Addition-
ally, physics-based radar sensor model has generated
time-domain I/Q signals with signal processing like
range Doppler processing and phase shift beamform-
ing. Therefore, physics-based radar sensor model has
more detailed representation of radar sensors and has
been used to validate the simulation outcomes of the
statistical radar sensor model.
Furthermore, a filter has been developed to reduce
the type 2 ghost detection as a remedy of functional
insufficiency of a radar model in the focus of the re-
flection on guardrails. The improved detection of the
radar with the filer has been presented as an upshots
of this study.
The focus of future work can be to implement
the physics-based radar sensor model in a more com-
plex environment where more environmental influ-
ences and reflective surfaces are present. In addi-
tion, the presented simulation-based testing approach
can be used to investigate more use cases considering
multipath propagation to support the verification and
validation of a radar sensor.
REFERENCES
Becker, C. J., Brewer, J. C., and Yount, L. J. (2020). Safety
of the intended functionality of lane-centering and
lane-changing maneuvers of a generic level 3 highway
chauffeur system.
Berk, M.and Schubert, O., Kroll, H.-M., Buschardt, B.,
and Straub, D. (2020). Assessing the safety of envi-
ronment perception in automated driving vehicles. 8
(1):49–74.
FGSV (2011). Guidelines for the design of motorways
(raa). https://www.fgsv-verlag.de/pub/media/pdf
/202 E PDF.v.pdf.
Gamba, J. (2020). Radar Signal Processing for Autonomous
Driving. Springer Singapore, Singapore, 1st edition.
Herz, G. (2017). Development of a radar sensor behav-
ior model for validation of advanced driver assistance
systems.
Herz, G., Schick, B., Hettel, R., and Meinel, H. (2019). So-
phisticated sensor model framework providing realis-
tic radar sensor behavior in virtual environments.
IEC/TR63069 (2019). Industrial-process measurement,
control, and automation - framework for functional
safety and security. https://webstore.iec.ch/public
ation/31421.
ISO21448 (2022). Road vehicles — safety of the intended
functionality. https://www.iso.org/standard/77490.h
tml.
ISO26262 (2018). Road vehicle — functional safety, part 1
to part 13. https://www.iso.org/standard/43464.html.
Khatun, M., Caldeira, G., Jung, R., and Glaß, M. (2021a).
An optimization and validation method to detect the
collision scenarios and identifying the safety specifi-
cation of highly automated driving vehicle. In 21st
International Conference on Control, Automation and
Systems (ICCAS), pages 1570–1575.
Khatun, M., Caldeira, G., Jung, R., and Glaß, M. (2021b). A
systematic approach of reduced scenario-based safety
analysis for highly automated driving function. In 7th
International Conference on Vehicle Technology and
Intelligent Transport Systems. Scitepress.
Khatun, M., Glaß, M., and Jung, R. (2020). Scenario-based
extended hara incorporating functional safety and so-
tif for autonomous driving. 30th European Safety and
Reliability Conference.
Leither, A., Watzenig, D., and Ibanez, J. (2020). Valida-
tion and Verification of Automated Systems. Springer
Nature Switzerland AG., European Union, 1st edition.
Liske, M. (2022). Master thesis: Simulation-based testing
to improve the sensor limitations for a sotif use case
scenario. In Masther Thesis. Institute for Advanced
Driver Assistance Systems and Connected Mobility-
Kempten University of Applied Sciences.
SENSORNETS 2023 - 12th International Conference on Sensor Networks
52

Martin, H., Winkler, B., Grubm
¨
uller, S., and Watzenig, D.
(2019). Identification of performance limitations of
sensing technologies for automated driving. In 2019
IEEE International Conference on Connected Vehi-
cles and Expo (ICCVE), pages 1–6.
Mathworks (2022a). aperture2gain: Convert effective aper-
ture to gain. https://de.mathworks.com/help/phased/r
ef/aperture2gain.html?searchHighlight=%20ap.
Mathworks (2022b). Create physics-based radar model
from statistical model. https://de.mathworks.com
/help/radar/ug/radar-model-abstract-level.html.
Mathworks (2022c). fspl: Free space path loss. https://de.m
athworks.com/help/phased/ref/fspl.html#:
∼
:text=Des
cription, -example&text=L%20%3D%20fspl(%20R
%20%2C%20lambda%20)%20returns%20th.
Mathworks (2022d). Introduction to statistical radar models
for object tracking. https://www.mathworks.com/help
/fusion/ug/introduction-to-radar-for-object-tracking
.html.
Mathworks (2022e). Radar data cube concept. https://de.m
athworks.com/help/phased/gs/radar-data-cube.html?s
earchHighlight=RADAR%20data%20cube&s tid=s
rchtitle RADAR%252.
Mathworks (2022f). Radar equation: Radar equation the-
ory. https://de.mathworks.com/help/radar/ug/radar-e
quation.html.
Mathworks (2022g). radardatagenerator: Generate radar
detections and tracks. https://de.mathworks.com/h
elp/radar/ref/radardatagenerator-system-object.html.
Mathworks (2022h). speed2dop: Convert speed to doppler
shift. https://de.mathworks.com/help/phased/ref/spe
ed2dop.html?searchHighlight=speed2do.
Mathworks (2022i). time2range: Convert propagation time
to propagation distance. https://de.mathworks.com/h
elp/phased/ref/time2range.html?searchHighlight=tim
e%25.
Mazzega, J. (2019). Pegasus method: An overview. PE-
GASDU Symphony.
Parker, M. (2017). Chapter 20-automotive radar with contri-
butions by ben esposito. In Parker, M., editor, Digital
Signal Processing 101 (Second Edition), pages 253–
276. Newnes, 2nd edition.
Podcast (2022). Understanding i/q signals and quadrature
modulation: Chapter 5 - radio frequency demodula-
tion. https://www.allaboutcircuits.com/textbook/radi
o-frequency-analysis-design/radio-frequency-demo
dulation/understanding-i-q-signals-and-quadrature-
modulation/.
SAEJ3016 (2021). Taxonomy and definitions for terms re-
lated to driving automation systems for on-road motor
vehicles. https://www.sae.org/standards/content/j301
6 202104/.
Schlager, B., Muckenhuber, S., Schmidt, S.and Holzer, H.,
Rott, R.and Maier, F. M., Saad, K., Kirchengast, M.,
Stettinger, G., Watzenig, D., and Ruebsam, J. (2020).
State-of-the-art sensor models for virtual testing of ad-
vanced driver assistance systems / autonomous driv-
ing functions. SAE International Journal of Con-
nected and Automated Vehicles, 3(3):233–261.
UL4600 (2022). Standard for evaluation of autonomous
products. https://ul.org/UL4600.
Valdez Banda, O. A. and Goerlandt, F. (2018). A stamp-
based approach for designing maritime safety man-
agement systems. Safety Science, 109:109–129.
Winner, H., Hakuli, S., Lotz, F., and Singer, C.
(2015). Handbuch Fahrerassistenzsysteme: Grund-
lagen, Komponenten und Systeme f
¨
ur aktive Sicher-
heit und Komfort. Springer Vieweg Wiesbaden, Wies-
baden, 3rd edition.
Wolf, C. (2022). The radar range equation, argumenta-
tion/derivation. https://www.radartutorial.eu/01.ba
sics/The%20Radar%20Rang%20Equation.en.html.
Yu, W., Li, J., Peng, L.-M.and Xiong, X., Yang, K., and
Wang, H. (2022). Sotif risk mitigation based on uni-
fied odd monitoring for autonomous vehicles. Journal
of Intelligent and Connected Vehicles.
Zhou, Y., Liu, L., Zhao, H., L
´
opez-Ben
´
ıtez, M., Yu, L., and
Yue, Y. (2022). Towards deep radar perception for au-
tonomous driving: Datasets, methods, and challenges.
Sensors, 22(11).
Ziegler, J., Bender, P., Schreiber, M., Lategahn, H., Strauss,
T., Stiller, C., Dang, T., Franke, U., Appenrodt, N.,
Keller, C. G., Kaus, E., Herrtwich, R. G., Rabe, C.,
Pfeiffer, D., Lindner, F., Stein, F., Erbs, F., Enzweiler,
M., Kn
¨
oppel, C., Hipp, J., Haueis, M., Trepte, M.,
Brenk, C., Tamke, A., Ghanaat, M., Braun, M., Joos,
A., Fritz, H., Mock, H., Hein, M., and Zeeb, E. (2014).
Making bertha drive—an autonomous journey on a
historic route. IEEE Intelligent Transportation Sys-
tems Magazine, 6(2):8–20.
A Simulation-Based Testing to Evaluate and Improve a Radar Sensor Performance in a Use Case of Highly Automated Driving Systems
53
